| Introduction | Structures planétaires | Observables | Techniques et méthodes | Lieux de vie | Auteurs | Boite à outils |
Modèle de la trajectoire |
Les expressions établies jusqu'ici permettent de paramétrer le mouvement d'une étoile autour de laquelle une planète orbite, en faisant l'hypothèse que les deux corps sont ponctuels, forment un système isolé. Nous allons utiliser ces expressions pour donner un modèle général, lorsque  planètes orbitent autour de l'étoile.
planètes orbitent autour de l'étoile.
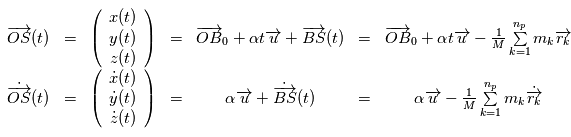
En notant  et
et  respectivement la position et la masse de l'étoile et
respectivement la position et la masse de l'étoile et  ,
,  les positions et masses des
les positions et masses des  planètes , les équations de la mécanique (classique) dans le référentiel barycentrique de ce système sont:
planètes , les équations de la mécanique (classique) dans le référentiel barycentrique de ce système sont:
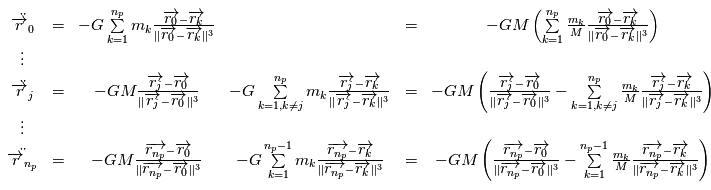
En négligeant tous les termes du type 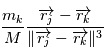 , c'est à dire l'intéraction entre les planètes, on obtient:
, c'est à dire l'intéraction entre les planètes, on obtient:
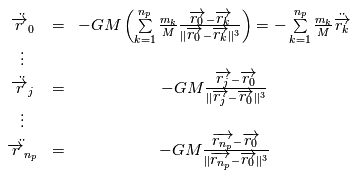
En résolvant les  problèmes à deux corps associés à chacune des planètes, par
problèmes à deux corps associés à chacune des planètes, par  (dont la première équation du système ci-dessus est la dérivée seconde) on obtient le mouvement de l'étoile. Le modèle de trajectoire complet dans un référentiel galiléen est:
(dont la première équation du système ci-dessus est la dérivée seconde) on obtient le mouvement de l'étoile. Le modèle de trajectoire complet dans un référentiel galiléen est: