Les CubeSats sont un technique plus rapide à mettre en oeuvre que les missions spatiales classiques pour observer un phénomène.
Les CubeSats
Auteur: Gary Quinsac
Les CubeSats
Ce cours est une introduction aux problématiques liées à la réalisation d'une mission spatiale. Pour ce-faire, nous vous proposons d'aborder un format bien particulier de petits satellites : les CubeSats. D'une manière générale, le bon fonctionnement d'un satellite est garanti par de nombreux domaines qui seront introduits dans ce cours. Dans un second temps, nous nous focaliserons sur un aspect en particulier, la nécessité de fournir un contrôle d'attitude et d'orbite pour mener à bien une mission spatiale. Des exercices vous permettront de vous exercer sur de nombreux points du cours. Enfin, vous pourrez utiliser les connaissances acquises pour pré-dimensionner quatre missions spatiales qui vous sont proposées sous la forme de mini-projets.
Prérequis
La partie Découvrir s'adresse à toute personne, pas nécessairement scientifique, qui souhaiterait découvrir brièvement les aspects et enjeux d'une mission spatiale. Pour aborder la partie Comprendre, un bagage scientifique de niveau licence est requis, à savoir :
Algèbre linéaire : maîtrise des produits scalaire et vectoriel, des opérations sur les matrices;
Géométrie dans l'espace à 3 dimensions : notions sur les référentiels et systèmes de coordonnées;
Mécanique classique :
connaissance du mouvement linéaire et de la 2ème loi de Newton (leurs équivalents pour des mouvements circulaires seront introduits dans le cours mais des notions préalables peuvent aider);
connaissance des forces de gravité, de pression, de frottement et électromagnétique.
Automatisme et filtrage : des notions dans ces deux domaines faciliteront la compréhension de la dernière partie de ce cours.
Tout au long de ce cours le lecteur doit garder à l'esprit que de nombreuses notions abordées pourraient faire l'objet d'un cours à part entière. Des liens vers d'autres cours issus de ce site ou de Fenêtre sur l'univers seront proposés autant que possible. Voici également des références qui pourront lui permettre d'approfondir les sujets souhaités :
Livres conseillés
M. Macdonald and V. Badescu, The International Handbook of Space Technology, Springer, 2014.
F. L. Markley and J. L. Crassidis, Fundamentals of Spacecraft Attitude Determination and Control, vol. 2. New York, NY: Springer New York, 2014.
M. J. Sidi, Spacecraft Dynamics and Control, vol. 7, no. 9. Cambridge: Cambridge University Press, 1997.
L'astronomie est science d'observation. Dans l'Antiquité, l'observation des objets célestes visibles à l’œil nu permet d'abord la mesure du temps. Ensuite, elle s'attache à prédire les mouvements des objets observés. Les observations étaient menées par des astrologues (qui parlent des astres) qui, au fil du temps, ont évolué pour travailler comme astronomes (qui étudient le mouvement des astres) et, aujourd'hui, astrophysiciens (qui utilisent la physique pour comprendre les astres). Au cours des siècles les instruments utilisés s'améliorent, permettant des observations toujours plus fines. Le XXème siècle marque un tournant, les astronomes se retrouvant confrontés à des limitations difficilement surmontables ainsi qu'à des besoins nouveaux :
de nombreuses longueurs d'onde ne sont pas accessibles depuis le sol car elles sont absorbées par l'atmosphère de notre planète ;
la pollution atmosphérique limite la précision des instruments au sol ;
on commence à vouloir effectuer des observations géophysiques et géographiques de notre planète pour la météorologie, la géodésie, la climatologie, l'inventaire des ressources naturelles, la reconnaissance militaire…);
enfin, un besoin de grands relevés à l'échelle de toute la planète apparaît.
Pour certains objectifs, il apparaît alors nécessaire de satelliser les instruments d'observation.
Différentes applications actuelles
Dès le début de l'ère spatiale, les industriels emboîtent le pas des scientifiques et imaginent des applications commerciales. On retrouve ainsi, de nos jours, de nombreux types de satellites différents :
satellites astronomiques, dédiés à l'observation d'objets spatiaux de l'Univers proche ou lointain. On peut citer le télescope spatial infrarouge Herschel et la mission de cartographie de notre galaxie Gaia, tous deux de l'agence psatiale européenne (ESA), ou encore le chasseur d'exo-planètes Kepler de l'agence spatiale américaine (NASA) ;
satellites de communication, qui répondent à des besoins de télécommunication, tels que ceux d'Intelsat, premier fournisseur de services de télécommunication par satellites en 2008 ;
satellites d'observation de la Terre, à visée non-militaire telles que la surveillance environnementale, la météorologie ou encore la cartographie. La famille de satellites SPOT développées par l'agence spatiale française (CNES) en fait partie ;
satellites de positionnement et de navigation servant à localiser des récepteurs au sol. À titre d'exemple, nous pouvons citer les systèmes américain GPS, européen GALILEO et russe GLONASS ;
vaisseaux spatiaux habités, comme la famille de véhicules spatiaux soviétiques puis russes Soyouz ;
stations spatiales, qui sont des structures artificielles développées pour que des humains puissent vivre dans l'espace. À la différence des véhicules spatiaux habités, celles-ci ne disposent pas d'un moyen de propulsion principal. La Station Spatiale Internationale (ISS) en est un exemple.
Pourcentage d'absorption du spectre électromagnétique par l'atmosphère terrestre. Si l'atmosphère est opaque à une grande partie du spectre électromagnétique, parmi les exceptions se trouve le domaine du visible.
Crédit :
NASA
Turbulence atmosphérique et optique adaptative
Effets liés à turbulence atmosphérique. L'image de gauche est l'étoile HIC 59206 capturée par le VLT, tandis que celle de droite est la même image corrigée par optique adaptative.
Crédit :
European Southern Observatory
Météorologie
L'ouragan Matthew vu dans l'infrarouge par le satellite Metop-A, le 7 octobre 2016. Les observations dans plusieurs bandes spectrales conduisent, une fois compilées, à une carte de température.
Crédit :
Eumetsat
Classes de satellites
Les satellites sont généralement classés en fonction de leur masse au lancement. Alors que dans les années 60, lorsque l'affrontement politique entre les États-Unis et l'Union soviétique s'exprimait sur le terrain de la course à la Lune, les engins spatiaux n'étaient limités que par les progrès techniques de l'époque, ce sont actuellement des critères économiques qui prévalent lors du développement des satellites. Une relation à peu près linéaire existe entre la masse d'un satellite et son coût. Une classification typique des satellites est présentée dans le tableau suivant.
Comparaison de la masse et du coût de certains satellites. Les deux paramètres sont reliés par une relation presque linéaire, les satellites scientifiques apparaissant plus coûteux.
Crédit :
Gary Quinsac
Hubble
Télescope spatial Hubble. Sa masse est de 11 tonnes, il fait la taille d'un bus (13 x 4 x 4 m3) et consomme 2,8 kW. Son orbite relativement basse (550 km d'altitude) a permis aux navettes spatiales américaines de venir effectuer des réparations et des remplacements d'équipements.
Crédit :
ESA
Station Spatiale Internationale
Plus grand objet artificiel placé dans l'espace (110 m de longueur, 74 m de largeur et 30 m de hauteur), la Station Spatiale Internationale fait environ 400 tonnes. Chacune de ses 16 ailes de panneaux solaires mesure 35 m de long pour 12 m de large, produisant un maximum de 120 kW. Son altitude varie entre 330 et 420 km et a été choisie pour faciliter son assemblage/ravitaillement en orbite par les différents pays impliqués dans son exploitation.
Crédit :
CNES
Satellite GPS
Un satellite GPS de 1,5 tonne pour 2.5 x 2 x 2 m3. Il consomme 1,9 kW et orbite à 20000 km d'altitude. De nombreux satellites de ce type composent ce qu'on appelle une constellation GPS, l'objectif étant d'avoir toujours au moins 4 satellites en visibilité depuis une zone donnée à la surface de la Terre.
Crédit :
GPS.gov
Satellite de télécommunication
Satellite de télécommunication KA-SAT d'une masse de 6 tonnes (dont 3 pour le carburant) et mesurant 5 x 2 x 2 m3. Comme de nombreux satellites de télécommunication il se trouve sur l'orbite géostationnaire (GEO), c'est à dire à 36000 km d'altitude. Ses panneaux solaires de 40 m d'envergure lui permettent de produire 14,4 kW.
Crédit :
J. Huart/ ESA
Système spatial
Un système spatial se décompose en trois éléments :
le segment spatial,
le segment sol,
le lancement,
Segment spatial
Le segment spatial est décomposé en deux sous-ensembles principaux : la charge utile et la plateforme. La charge utile regroupe les instruments nécessaires à la réussite de la mission. Cela va du montage optique pour un satellite d'observation tel que Hubble aux antennes et amplificateurs associés pour un satellite de télécommunication. Il est important de remarquer que c'est la charge utile d'un satellite qui définit sa mission. La plate-forme assure les servitudes, c'est-à-dire l'ensemble des fonctions génériques nécessaires à l'activité en orbite. Ses différentes fonctions sont :
la structure porteuse,
le contrôle thermique,
la génération, le stockage et la distribution d'énergie,
la télécommunication,
la télémesure, la télécommande et la localisation,
le traitement, le stockage et la gestion des données à bord,
Ces aspects sont developpés plus en détail dans la partie consacrée aux sous-systèmes.
Segment sol
Le segment sol se compose des stations de poursuite, des moyens d'opération et de commande/contrôle et des moyens de programmation de la charge utile, de réception, pré-traitement, archivage et diffusion des informations de cette même charge utile (centre de mission).
Lancement
Le lancement est l'étape permettant la mise en orbite d'un objet. C'est une étape dimensionnante en termes d'orbite atteinte, de masse et de volume disponibles sous coiffe. Le lanceur le plus lourd jamais créé a permis à un homme de marcher sur la Lune pour la première fois en 1969 et se nomme Saturn V. Depuis, de très nombreux types de lanceurs ont été développés pour permettre à des charges utiles plus ou moins importantes d'atteindre différentes orbites.
Les différentes orbites terrestres sont classées en fonction de leurs altitude, inclinaison et excentricité. En voici quelques unes :
basses ou LEO pour "Low Earth Orbit", ces orbites présentent l'avantage de permettre des révolutions rapides et d'être sous les ceintures de Van Allen dont elles ne subissent pas les particules énergétiques ;
héliosynchrones ou SSO pour "Sun Synchronous Orbit", elles sont choisies spécifiquement pour que l'angle entre le plan d'orbite et la direction du Soleil reste quasiment constant, ce qui permet notamment d'éviter les phases d'ombre dues à la Terre ;
moyennes ou MEO pour "Medium Earth Orbit", privilégiées par les satellites de navigation (GPS, Glonass, Galileo) ;
très elliptiques ou HEO pour "Highly Elliptical Orbit", elles sont utilisées pour permettre à des satellites de passer une longue période, autour de son apogée, au dessus de zones du globe à forte latitude ;
de transfert géostationnaire ou GTO, pour "Geostationary Transfert Orbit", pour rejoindre une orbite géostationaire depuis une orbite basse ;
géostationnaires ou GEO pour "Geostationary Earth Orbit", pour orbiter en 24h et ainsi pouvoir se trouver en permanence au-dessus du même point sur la Terre au voisinage de l'équateur.
lointaines ou interplanétaires; elles regroupent les trajectoires de rencontre avec la Lune ou d'autres corps de notre système solaire, ainsi que des zones d'équilibre gravitationnel stables nommées points de Lagrange.
Ceintures de Van Allen
Les ceintures de Van Allen, ainsi nommées en l'honneur du physicien les ayant découvertes, sont des zones de la magnétosphère terrestre contenant une grande densité de particules énergétiques, pour la plupart d'origine solaire. Leurs deux principaux effets sont la création d'aurores polaires lorsque les particules énergétiques rencontrent l'atmosphère terrestre et la mise en danger des satellites les traversant (des blindages sont nécessaires pour protéger les équipements sensibles de satellites passant une longue période dans les ceintures). On a pour habitude de considérer qu'elles sont au nombre de deux, la première s'étendant entre 700 km et 10 000 km d'altitude et la seconde entre 13 000 km et 65 000 km. D'autres ceintures sont susceptibles d'apparaître mais ne semblent pas permanentes.
Station sol de PicSat
Station sol UHF/VHF installée à l'Observatoire de Meudon pour communiquer avec le CubeSat PicSat.
Crédit :
PicSat
Comparaison de lanceurs
Comparaison de lanceurs utilisés depuis le début de l'ère spatiale. La masse de carburant embarqué par un lanceur pour satelliser un objet représente la majeure partie de sa masse au lancement. Par exemple, l'Ariane 5 GS est capable d'emporter plus de 6 tonnes en orbite GTO, elle mesure à peu près 50 m de hauteur pour une masse au décollage de 750 tonnes composée à 90% de carburant.
Crédit :
NASA
Orbites terrestres
Orbites terrestres les plus utilisées.
Crédit :
Gary Quinsac
Aurore boréale
Photo d'une aurore boréale en Alaska. Ces phénomènes lumineux sont provoqués par la rencontre entre des particules énergétiques provenant du Soleil ou du rayonnement cosmique et de l'atmosphère. Ces particules ont été préalablement piégées par le champ magnétique terrestre dans une zone que l'on nomme ceinture de Van Allen.
Conception, exigences et contraintes
Tout projet spatial répond à un enjeu : objectif scientifique, démonstration technologique... Il doit donc faire face à son lot d'exigences et de contraintes. Les exigences définissent les fonctions qu'un système ou un composant doit remplir. Elles répondent à la question "que fait ce système/composant ?". Les contraintes spécifient, quant à elles, ce que le système doit être. Elles sont généralement des limitations du système.
Cette situation est encore plus vraie pour les projets spatiaux. Les erreurs commises sont le plus souvent irréversibles et irratrapables une fois que le système est lancé. Il faut ainsi :
remplir des exigences mission,
prendre en compte toutes les contraintes technologiques, d'environnement spatial, de lancement et des moyens sols,
respecter les règlements,
proposer des compromis performance/coûts et d'éventuelles modifications des exigences.
Les exigences mission dépendent du type de satellite considéré, mais le principe est toujours le même : un besoin est exprimé auquel le satellite va essayer de répondre. Se faisant, un type d'orbite va être identifié :
non-terrestre : au point de Lagrange, solaire, interplanétaire.
De ce choix découle un système de lancement, ou lanceur. La charge utile embarquée doit ensuite répondre aux exigences mission tout en prenant en compte les contraintes imposées par le système de lancement (volume et masse disponibles, interfaces) et l'environnement orbital. Toutes ces questions se posent bien entendues également pour la plate-forme, qui devra s'adapter à la charge utile choisie (ou inversement, si le choix est fait d'utiliser une plate-forme standardisée).
L'environnement spatial présente de nombreuses spécificités qui doivent être prises en compte dès le début du développement :
le vide,
l'apesanteur,
les forts contrastes de température et l'absence de convection thermique,
les effets des rayonnements électromagnétiques et des particules chargées énergétiques,
la présence d'oxygène atomique qui est un agent chimique agressif,
la collision possible avec des débris ou des micrométéorites,
l'impossibilité d'accéder au satellite une fois en orbite (sauf cas exceptionnel).
Outre ces aspects négatifs, l'environnement peut également être mis à profit pour certaines fonctions :
contrôler l'attitude avec le gradient de gravité, la pression de radiation solaire ou le champ magnétique local,
contrôler l'orbite avec le freinage atmosphérique,
refroidir des composants avec le fond du ciel à 3 K.
Que le programme soit public ou privé, la question du coût reste centrale. Ce coût doit prendre en compte le lancement, le segment spatial (durée de fabrication, des essais…), le système sol et des opérations. Il est ensuite amorti sur la durée de vie du système.
Des règlements nationaux et internationaux imposent des restrictions, notamment en termes de fréquences de télécommunication. La bande de fréquence utilisée doit avoir été définie en amont. Dans certains cas (satellite GEO) la notion de compatibilité électromagnétique implique de ne pas perturber les satellites voisins. La gestion d'un satellite en fin de vie est de plus en plus importante du fait de la prolifération des débris en orbite terrestre. Ainsi en France, la Loi sur les Opérations Spatiales (LOS) réglemente ces aspects.
Exemple : pollution orbitale
En orbite autour de la Terre, les objets sont animés de vitesses relatives qui peuvent atteindre 15 à 20 km/s. À de telles vitesses, les énergies cinétiques qui sont en jeu peuvent engendrer de très importants dégâts. Chaque collision, au même titre que le délitement des vieux satellites, crée de nouveaux débris qui viennent augmenter le nombre d'objets orbitant la Terre. Cette pollution orbitale croît très fortement et impose aux États et aux entreprises de mettre en place des stratégies de réduction du nombre de débris.
Classification des débris orbitaux et risques associés
Taille de l'objet
Nombre d'objets
Répertoriés ?
Risques associés à l'objet
> 10 cm
20 000
Oui
Collisions catastrophiques, production de débris
1 cm < objet < 10 cm
500 000
Non
Perte de la mission, aucun blindage ne résiste à des objets > 2 cm
< 1 cm
> 10 000 000
Non
Perforations, risque de perte d'équipement critique
Arbre fonctionnel
Exemple d'arbre fonctionnel. A partir des fonctions principales sont dérivées des fonctions secondaires, jusqu'à pouvoir identifier des solutions exécutant ces fonctions.
Crédit :
Gary Quinsac
Nombre mensuel d'objets en orbite terrestre par type d'objets
Résumé de tous les objets en orbite terrestre officiellement répertoriés par l'U.S. Space Surveillance Network. Les "débris issuent de la fragmentation" regroupent les débris produits par des anomalies (explosions, casses...), tandis que les "débris fonctionnels" regroupent l'ensemble des objets libérés, distribués ou séparés dans le cadre d'une mission. Les "morceaux de fusée" quant à eux sont des pièces ou des ensembles de pièces appartenant à la fusée (tels que les différents étages de poussée). Le pic observé en 2007 correspond à la destruction par la Chine de l'un de leurs satellites météorologiques (Fengyun-1C) dans le cadre d'un test de missile anti-satellite. Le second, en 2009, est dû à la collision entre un satellite militaire russe hors de service (Cosmos 2251) et un satellite de télécommunication américain (Iridium 33).
Crédit :
NASA - Orbital Debris Quarterly News, February 2017
Déroulement d'un projet spatial
Cycle de vie d'un système
Au cours d'un projet, un système va être amené à évoluer, d'un premier état conceptuel à un état physique. Des tests doivent alors êtres effectués pour s'assurer que le système répond aux exigences identifiées précédemment, ce sont les étapes de validation. Les états successifs du système et les activités le concernant constituent ce que l'on appelle le cycle de vie. S'il existe différentes façons de représenter ce-dernier, le cycle en V reste le modèle le plus suivi. Ce cycle est parcouru de gauche à droite, d'abord du haut vers le bas puis du bas vers le haut. Aux phases de conception succèdent les phases d'assemblage, d'intégration et de test. Le cycle en V permet d'identifier facilement l'étape de validation correspondant à chaque étape de conception.
Dans certains projets, tels que des projets étudiants, on utilise des méthodes agiles. Elles ont pour origine le manifeste Agile et reposent sur un cycle de développement itératif, incrémental et adaptatif. Ces méthodes autorisent une plus grande flexibilité et réactivité, nécessaires à ces projets.
Phases d'un projet spatial
Dans le cas d'un projet spatial, on divise le déroulement du projet en 7 phases successives. Chacune d'entre-elles correspond à un état du système et se conclut par une revue de projet. On peut remarquer que les premières phases correspondent aux étapes de conception (0-A-B), avant de passer à la réalisation (C-D), à l'utilisation et au retrait.
Durant la phase 0, on exprime la mission en termes de besoin, on évalue l'environnement et ses contraintes et on identifie des concepts possibles.
La phase A sert à affiner et valider le besoin. Les différents concepts possibles sont ainsi explorés, on identifie et évalue les éléments critiques afin d'estimer les risques associés.
Durant la phase B l'architecture système est précisément définie. Cette architecture système inclut les différentes vues (opérationnelle, fonctionnelle et technique) et les différents points de vue (conception, supervision, opération, maintenance) du système. Cette architecture système est un élément incontournable de respect des contraintes de coût, de délai, de qualité et de performance inhérentes à un projet spatial. On commence également à sélectionner et définir, préliminairement, des solutions techniques.
La définition détaillée n'a lieu que lors de la phase C.
La phase D correspond à la phase de réalisation et de test des produits.
C'est seulement lors de la phase E que le système va entrer dans sa période d'utilisation. Une fois lancé, une dernière qualification en vol a lieu puis l'exploitation peut commencer.
Lorsque sa mission est terminée, le système entre en phase F, qui correspond à la fin de vie du satellite.
Cycle en V
Cycle en V d'un produit. Chaque étape de conception correspond à une étape de validation, de la même couleur.
Crédit :
Gary Quinsac
Phases d'un projet spatial
Phases d'un projet spatial. Chaque phase correspond à un état d'avancement du système et se conclut par une revue de projet.
Crédit :
Gary Quinsac
Nanosatellites
Auteur: Gary Quinsac
Standard CubeSat
Le standard CubeSat a été défini en 1999 par l'Université polytechnique de Californie (Cal Poly) et l'Université de Stanford comme un format de nanosatellites. Ce standard définit une unité de base, appelée "U", qui est un cube de 10 cm d’arête pour une masse d'environ 1,3 kg. Ces unités peuvent être assemblées de manière à obtenir des satellites plus volumineux, appelés "2U", "3U", "6U", "12U" ou même "27U" en fonction du nombre d'unités utilisé. Outre son format réduit, ce standard permet une importante réduction des coûts financiers et opérationnels :
Possibilité pour un CubeSat d'être lancé en tant que charge utile secondaire, à condition qu'il n'amène pas de risque supplémentaire à la mission principale. L'extérieur de la structure des CubeSat étant standardisé, cela permet l'utilisation de "déployeurs" qui assurent l'interface entre le satellite et le lanceur. Le CubeSat est placé en position éteinte dans un déployeur fermé (P-POD ou équivalent) attaché à la fusée qui assure le lancement. Le CubeSat reste ainsi dans le déployeur jusqu’à son largage dans l’espace par ouverture du déployeur. Le largage déclenche la mise sous tension du CubeSat et donc le début de sa mission ;
Fabrication en série donnant lieu à l'apparition de composants sur étagère (COTS pour "Components On The Shelf" en anglais) ;
Illustration du standard CubeSat
Chaque unité ("U) est un cube de 10 cm d’arête pour une masse d'environ 1,3 kg. Il est possible d'assembler plusieurs unités.
Il est possible de classer les CubeSats en différents secteurs et par extension tous les satellites de moins de 50 kg (échelles "nano" et en partie "micro"), dont les CubeSats forment la majeure partie :
Secteur civil : ils sont utilisés pour des activités non militaires et à but non lucratif. On peut distinguer les deux catégories suivantes :
Secteur académique : secteur historique des CubeSats, il regroupe l'ensemble des satellites développés à des fins pédagogiques. L’objectif principal est de former les étudiants à un certain nombre de disciplines d’ingénierie nécessaires pour réaliser un satellite. C’est dans ce but que des universités américaines ont créé le standard CubeSat. La mission particulière du satellite n’est donc pas en soi l’objectif prioritaire.
Secteur public : on y retrouve tous les CubeSats des agences nationales ou des laboratoires de recherche (exemple : NASA).
Secteur militaire : ce secteur regroupe les opérateurs dont l'objectif principal est de participer à des activités de défense nationale (exemple : US Naval Research Laboratory). La demande des opérateurs militaires devrait être constante dans les années à venir.
Secteur commercial : les opérateurs de cette catégorie envoient des satellites pour générer de l'activité et du profit (exemple : Spire). Ce secteur commercial devient le principal moteur du lancement de nouveaux CubeSats, avec plus de 70 % des lancements prévus dans les 5 prochaines années.
CubeSat technologique : l’objectif principal est de démontrer une technologie particulière en environnement spatial avec un satellite beaucoup moins cher qu’une mission traditionnelle. Ainsi les nanosatellites peuvent nous aider à préparer les instruments de demain. Si la mission du nanosat est un succès, la technologie aura un niveau de maturité technologique (TRL pour "technology readiness level" en anglais) plus élevé, ce qui permettra de la proposer plus tard pour une mission spatiale scientifique encore plus ambitieuse et pas nécessairement au format nanosatellite.
CubeSat scientifique : le CubeSat peut aussi embarquer un instrument de mesure. L’objectif principal est alors de réaliser cette mesure scientifique. Les applications scientifiques émergent peu à peu, avec une diversification de concepts, comme le CubeSat d’accompagnement d’une mission mère qui peut aller reconnaître le terrain avant de s’approcher d’un astéroïde ou comme les flottilles ou les essaims de nanosatellites pour des mesures "coopératives" (mesures simultanées par plusieurs CubeSats).
CubeSat d'observation de la Terre / de télédétection : le satellite se concentre sur l'étude de la Terre et son atmosphère. La plupart des CubeSats commerciaux se concentre sur ce type d'applications (Planet Labs et Spire).
CubeSat de communication : le CubeSat relaie des signaux émis par des stations émettrices vers des stations réceptrices. On retrouve de nombreux CubeSats pédagogiques dans cette catégorie (ITF 2, lancé le 12/2016).
Une tendance à l'embonpoint
Depuis la création de ce standard, le nombre de lancements a fortement augmenté au fil des ans. Cette tendance ne fait que se confirmer avec les nombreux nouveaux acteurs du marché, qu'ils se placent du côté de la conception de CubeSats ou de leur lancement. Il est intéressant de noter que si les CubeSats de petit format (1U, 2U et 3U) ont été privilégiés jusqu'à présent, des formats 12U et 27U sont maintenant envisagés afin d'offrir des profils de mission plus flexibles (missions interplanétaires, plus grosse charge utile) tout en préservant les avantages offerts par la standardisation, faisant varier le profil des CubeSats envoyés.
Nano/microsatellites par secteur (1 - 50 kg)
Le secteur commercial est en très forte augmentation, devenant bientôt le secteur dominant les satellites de 1 à 50 kg.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Nano/microsatellites par application (1 - 50 kg)
Le format de ces satellites est particulèrement intéressant pour la réalisation de constellations d'observation de la Terre. Les progrès réalisés sur la miniaturisation et les retours d'expérience des premières missions poussent les acteurs à considérer sérieusement leur utilisation dans un but scientifique.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Lancements des nano/microsatellites
Après deux années de stagnation majoritairement due à des retards de lancement, l'année 2017 a vu une forte augmentation du nombre de lancements. Cela correspond à la croissance attendue pour ce marché, avec près de 2600 lancements attendus d'ici 5 ans.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Evolution de la taille des nanosatellites
On constate une augmentation de la taille des nanosatellites afin de répondre aux demandes de charges utiles plus complexes. Néanmoins, le format 3U devrait rester le plus populaire dans les 5 années à venir.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
la génération, le stockage et la distribution d'énergie,
la télécommunication,
la télémesure, la télécommande et la localisation,
le traitement, le stockage et la gestion des données à bord,
le contrôle d'attitude et d'orbite,
la propulsion.
Charge utile
La charge utile est le sous-système qui réalise les fonctions correspondant à l'objectif de la mission. Si celle-ci varie fortement d'une mission à l'autre, les éléments suivants qui forment la plate-forme sont généralement présents sur tous les satellites.
Structure porteuse
La structure porteuse a pour but d'assurer l'interface avec le lanceur, la cohésion mécanique du satellite et le support des équipements. Elle est aussi appelée "architecture mécanique". L'intégrité du satellite doit être assurée dans les différents environnements qu'il rencontrera au cours de sa vie, c'est-à-dire le sol, le lancement et l'orbite.
Au sol, il est victime de sollicitations mécaniques de type quasi-statique lors de la phase d'intégration et l'ensemble de ses composants est soumis à la gravité (1 g au sol), qui peut entraîner des déformations par différence avec l'environnement orbital. Le transport et la manutention peuvent être sources de chocs et de conditions climatiques variables (- 40°C, + 40°C). Les longues périodes de stockage nécessitent un contrôle de l'environnement (pression, température, hygrométrie) afin de ne pas dégrader les caractéristiques des éléments structuraux. A cela s'ajoutent les essais mécaniques qui constituent la source principale de sollicitation mécanique au sol.
Durant le lancement, différents éléments sont dimensionnants du point de vue mécanique. On peut citer l'allumage des moteurs et le décollage, la pression dynamique et le passage du mur du son, la séparation des propulseurs latéraux à poudre (EAP) ou encore la séparation de la coiffe. Ils sont définis dans les Manuels Utilisateurs des Lanceurs par l'accélération statique continue, les vibrations à basse fréquence, l'environnement acoustique et les chocs dus aux séparations pyrotechniques.
Lors de sa vie orbitale, le satellite est soumis à un cyclage en température dû aux variations de l'environnement thermique externe et à la dissipation des électroniques internes, générant des gradients thermiques sur la structure. L'utilisation de matériaux organiques, quant à elle, pose des problèmes hygro-élastiques. Une fois dans l'espace (ou même dans la coiffe du lanceur), ces matériaux subissent une déformation liée à la désorption de l'humidité préalablement absorbée au sol. Dernier aspect à ne pas négliger, les vibrations en orbite provoquées par les parties mobiles de certains équipements (roues, gyroscopes, mécanismes d'orientation des générateurs solaires...) peuvent altérer l'alignement d'optiques particulièrement sensibles.
Contrôle thermique
Le contrôle thermique a pour fonction de maintenir les équipements dans leur plage de température de fonctionnement, quelle que soit la phase de la mission, et ce durant toute la durée de vie du satellite. Dans le cas de missions nécessitant une grande précision astrométrique, le contrôle thermique permet également d'uniformiser les températures afin d'assurer une stabilité dimensionnelle (et ainsi éviter des phénomènes de dilatation/contraction par exemple). Pour ce faire, on peut faciliter ou interdire certains échanges thermiques de façon passive, ou utiliser des actionneurs (des réchauffeurs pour réchauffer ou des radiateurs pour refroidir) pour réguler la température. Ce contrôle thermique s'effectue dans des conditions très particulières, celles du milieu spatial, qui limitent le nombre d'acteurs. Nous pouvons classer les acteurs en deux catégories : les sources froides et les sources chaudes.
Le Soleil, qui génère au voisinage de la Terre un flux de 1500W/m2, est l'une des sources chaudes. Son flux décroît en 1/D2, D étant la distance au Soleil. Pour une sonde spatiale s'éloignant fortement du Soleil, l'impact du flux solaire décroîtra donc rapidement.
Les planètes, telles que la Terre, sont elles aussi des sources chaudes. Elles réfléchissent le flux solaire, c'est ce que l'on appelle le flux albédo. Elles émettent également directement un rayonnement.
Les surfaces externes du satellite se refroidissent en émettant un rayonnement vers le fond du ciel (partie du ciel sans le Soleil et les planètes) qui n'est pas réfléchi vers le satellite. Néanmoins, l'espace est à l'origine d'un rayonnement dont le spectre correspond à un corps noir à 3 K. Ce rayonnement, appelé fond diffus cosmologique, est le vestige d'une phase importante de notre univers : sa réionisation 380 000 ans après le Big Bang. Cela veut dire que le fond du ciel consitue un puits radiatif infini et qu'un corps inerte dans l'espace tend vers une température d'équilibre de 3 K.
Complément : modes de transfert d'énergie
Il existe trois modes de transfert d'énergie :
Le transfert par conduction est l'échange d'énergie, sous l'effet d'une différence de température, entre deux corps en contact physique ou au sein d'un même corps solide.
La convection thermique désigne l'échange d'énergie à l'interface d'un fluide en mouvement sous l'effet d'une différence de température. L'absence de fluide conducteur (air) dans l'espace empêche ce type de transfert thermique vers l'extérieur du satellite.
Le transfert radiatif (ou transfert par rayonnement) représente l'unique transfert possible avec l'espace. Il représente le transfert d'énergie par radiation et implique l'interaction du rayonnement avec la matière.
Génération d'énergie
La génération d'énergie permet le fonctionnement de l'engin spatial en lui fournissant l'énergie électrique dont il a besoin. En effet, ce dernier étant mobile et autonome, il a besoin de produire son électricité. Le système d'alimentation électrique est découpé en quatre éléments qui sont la production (ou source primaire), le stockage (ou source secondaire), la régulation et la distribution.
La production électrique utilise généralement le flux solaire grâce à des générateurs solaires placés sur la structure du satellite. Ces générateurs solaires, aussi appelés panneaux solaires, peuvent être déployables afin d'offrir une grande surface d'accumulation malgré un volume restreint dans la coiffe du lanceur. Des cellules solaires assurent la conversion de l'énergie lumineuse en énergie électrique, avec un certain rendement. Outre l'énergie solaire, des missions lointaines pilotées par les agences américaine ou russe ont également utilisé des générateurs nucléaires ou isotopiques (sonde Cassini-Huygens).
L'énergie produite est ensuite stockée dans les batteries électrochimiques afin d'alimenter le satellite lors de phases d'éclipse ou de consommation instantanée supérieure à la production des générateurs.
La régulation et la distribution permettent de fournir à la charge utile et aux autres éléments nécessitant de l'énergie une alimentation présentant des caractéristiques électriques précises et compatibles avec les différents équipements. La régulation permet également de garantir la durée de vie de la batterie. Pour ce faire, on limite la profondeur de décharge, c'est-à-dire la quantité d'énergie fournie par la batterie, on limite le courant de charge et de décharge...
Ce sous-système occupe usuellement entre 20 % et 30 % de la masse sèche (réservoirs vides d'ergols) d'un satellite classique.
Télécommunication
Le sous-système de télécommunication utilise des émetteurs, des récepteurs ou des transpondeurs afin de gérer l'ensemble des fonctions de communication. S'il s'agit d'un satellite de communication, ce sous-système peut alors devenir la charge utile du satellite.
Télémesure, télécommande et localisation
Les équipements de télémesure, télécommande et localisation constituent un ensemble de télécommunications de servitude transmettant au sol les télémesures de différents paramètres soumis à contrôle (température d'un équipement, charge d'une batterie) et recevant les télécommandes pour les équipements à opérer (plate-forme et charge utile).
Chaîne de traitement, de stockage et de gestion bord
Les informations transitant dans le satellite sont prises en charge par la chaîne de traitement, de stockage et de gestion bord. Ce sous-système s'assure de la bonne distribution des données vers les équipements. Il est également en charge du stockage des données avant que celles-ci soient transmises, généralement à une station sol.
Système de contrôle d'attitude et d'orbite
Le système de contrôle d'attitude et d'orbite (SCAO) assure deux types de mouvement : celui autour de son centre de gravité (attitude) et celui de son centre de gravité (orbite). En d'autres termes, il est responsable de l'orientation et de la position du satellite dans l'espace. En fonction de l'attitude recherchée, les commandes d'attitude impriment les corrections d'orientation autour du centre de gravité. Le maintien du satellite sur l'orbite prévue est indispensable à la plupart des missions. Le sous-système de propulsion crée les incréments de vitesse nécessités par les manœuvres d'orbite. Celles-ci sont commandées depuis le sol, ou déterminées à bord, la détermination d'orbite à bord étant aujourd'hui rendue possible par les navigateurs embarqués qui permettent d'accroître l'autonomie des satellites.
Propulsion
La propulsion, enfin, fonctionne de pair avec le SCAO. Elle est un actionneur du SCAO, assez complexe pour être traité séparément, qui a pour fonction de créer les variations de vitesse nécessaires aux manœuvres du satellite.
On retrouve une partie des sous-systèmes classiques d'un satellite sur ce CubeSat 1U. On remarque également qu'ils se présentent généralement sous la forme de cartes disposées les unes après les autres dans la structure du CubeSat.
Crédit :
Wikipedia
Exemples de missions CubeSats
GOMX-3 un satellite de démonstration téchnologique
GOMX-3 est une collaboration entre l'ESA et GOMspace (Danemark) embarquant différentes charges utiles de démonstration technologique :
un contrôle d'attitude 3 axes avec 1 degré de précision, permettant jusqu'à 7 changements d'attitude par orbite et un suivi de cible,
un récepteur expérimental pour détecter les signaux ADS-B (Automatic Dependent Surveillance-Broadcast) diffusés par les avions en vol,
une radio réalisée par logiciels pour évaluer les faisceaux de réception des satellites de télécommunication,
un émetteur bande-X développé par Syrlinks pour télécharger des données à haut débit.
Focus sur l'émetteur bande-X
De nombreux types de missions sont maintenant rendus possibles par la miniaturisation des charges utiles, qu'elles soient scientifiques ou technologiques. L'une des principales limitations de ces missions en orbite basse est le volume de données pouvant être téléchargées par orbite. Actuellement, les CubeSats embarquent des sous-systèmes de télémétrie UHF et bande-S qui permettent de télécharger jusqu'à quelques centaines de mégaoctets (Mo) par jour. Ce volume de données est limité par la durée de visibilité entre la station sol et l'antenne du satellite ainsi que le débit (~100 ko/s en UHF et ~1Mo/s en bande-S). Afin d'augmenter les taux de transmission tout en restant compatible avec les stations sol existantes, le CNES et l'ESA ont voulu tester un émetteur-récepteur en bande-S et un émetteur en bande-X, tous deux miniaturisés pour le format CubeSat. L'émetteur en bande-X permet des débits de l'ordre de plusieurs Go par survol d'une station sol compatible bande-X (entre 3,4 et 5 m dans ce cas), tout en étant adapté aux dimensions d'un CubeSat-3U (< 10 W et 300 g pour le sous-système).
Après une année d'opération, le satellite a effectué sa ré-entrée atmosphérique. Tous les objectifs ont été atteints et la mission nominale a même été dépassée, permettant de démontrer d'autres capacités.
QB50 une flotte de CubeSats scientifiques universitaires
L'objectif de la mission QB50 est de démontrer la possibilité de lancer un réseau de satellites construits par des équipes universitaires à travers le monde pour effectuer une étude scientifique de la basse thermosphère. De nombreux enjeux du standard CubeSat se retrouvent à travers les différents objectifs de cette mission :
faciliter l'accès à l'espace pour des missions spatiales à petite échelle,
étudier la couche la moins explorée de l'atmosphère (entre 200 et 380 km),
effectuer des démonstrations technologiques avec certains CubeSats, notamment QARMAN (étude de la rentrée atmosphérique) et InflateSail (test d'une voile solaire),
permettre à des étudiants en ingénierie de concevoir et construire ces satellites.
Focus sur l'étude scientifique de la thermosphère
La majeure partie des CubeSats de QB50 a comme objectif scientifique d'effectuer des mesures in-situ en de nombreux points de la thermosphère. Par le passé, cette région a été étudiée par des satellites aux orbites très elliptiques (périgée à 200 km et apogée à 3000 km), ne permettant de passer que quelques dizaines de minutes dans la zone d'étude. Les différentes techniques actuelles sont limitées. Les fusée-sondes ("sounding rockets") permettent d'obtenir des mesures durant quelques minutes et le long d'une unique colonne. Des mesures à distance sont faites depuis le sol et des orbites plus élevées, typiquement entre 600 et 800 km. L'environnement est sondé grâce à la diffusion d'un signal de référence. De telles mesures sont rendues difficiles par la raréfaction de l'atmosphère dans la basse thermosphère qui empêche d'obtenir des signaux de retour de qualité. Le moindre coût des CubeSats permet d'accepter la très courte durée de vie inhérente à une orbite très basse, offrant une étude in-situ d'une période de plusieurs mois. Trois types d'instruments sont répartis parmi les satellites (un type par CubeSat), offrant ainsi une étude poussée des différents paramètres régissant le comportement de cette région de l'espace.
Autres missions
De nombreux projets de CubeSats sont développés dans le cadre de C2ERES (Campus et Centre de Recherche pour l’Exploration Spatiale), le pôle spatial de l'Université de Recherche PSL conjointement piloté par le LabEx ESEP et le Master OSAE. En août 2017, on en dénombre pas moins de 8, à des stades de développement différents :
PICSAT, surveillance de l'exoplanète Beta Pictoris b
METEORIX, spectre UV des météores pour analyser la composition des météoroïdes
SERB, précurseur pour la surveillance de la variabilité solaire
Illustration du CubeSat GomX-3 (3U) développé par GOMspace.
Crédit :
GomSpace
Lancements des CubeSats du programme QB50
En août 2017, 36 CubeSats du programme QB50 ont été lancés : 28 depuis la station spatiale internationale et 8 par le lanceur indien PSLV.
Crédit :
QB50
Système de Contrôle d'Attitude et d'Orbite
Auteur: Gary Quinsac
Introduction au Système de Contrôle d'Attitude et d'Orbite
Le contrôle d'attitude et d'orbite concerne tous les aspects nécessaires à la maîtrise de l'orientation et de la trajectoire du satellite. Il comprend :
la prise en compte des phénomènes physiques gouvernant le déplacement du satellite;
les méthodes pour mesurer l'état du satellite;
la détermination des lois de contrôle et leur implémentation;
les technologies nécessaires afin de produire ces actions de contrôle.
les capteurs ou détecteurs, permettant de restituer les vitesses et positions angulaires définissant l'attitude,
l'électronique et l'informatique de bord, chargées du traitement des informations provenant des capteurs,
les actionneurs, permettant de maintenir une attitude, changer de pointage ou encore modifier les vitesses angulaires,
Le SCAO est l'un des sous-systèmes essentiels de la plupart des satellites. L'une de ses raisons d'être est l'existence de perturbations agissant sur un satellite via des couples ou forces extrêmement faibles qu'il faut utiliser ou compenser. Si rien n'entrave ces phénomènes, les conséquences de ces effets deviennent rapidement significatives. Ces perturbations peuvent être externes (c'est-à-dire causées par des phénomènes extérieurs au satellite) ou internes (c'est-à-dire liées à des mécanismes ou déplacements propres au satellite).
Au sein du SCAO, on a pour habitude de distinguer le contrôle d'attitude du contrôle d'orbite de la manière suivante :
le Système de Contrôle de l'Attitude (SCA), qui concerne la maîtrise de l'attitude, c'est-à-dire l'orientation du satellite ou de son mouvement autour du centre d'inertie,
le système de Guidage, Navigation et Contrôle (GNC) est lui en charge de la trajectoire du centre d'inertie du satellite et donc des paramètres orbitaux du véhicule spatial.
Dans la suite de ce cours nous insisterons sur le SCA, même si nous reviendrons par moments sur le système GNC. Il faut bien comprendre que les deux sont généralement développés de manière indépendante et gérés de façon autonome. Le SCAO dans son ensemble est en interaction avec les autres éléments du satellite. Ces interactions sont à l'origine de nombreuses contraintes essentielles lors du développement du SCAO.
Définitions
Quelques définitions sont importantes à ce stade.
Détermination d'attitude : connaissance de l'orientation du satellite par rapport à un référentiel
Contrôle d'attitude : processus permettant d'atteindre et de maintenir l'orientation ou le taux de changement d'orientation désiré
Navigation : connaissance de la position et de la vitesse du satellite par rapport à un référentiel
Contrôle d'orbite : processus permettant d'atteindre et de maintenir l'orbite désirée
Guidage : séquence de commande depuis l'état (attitude ou position orbitale) actuel à un état désiré
Digramme en bloc d'un SCAO
Diagramme en bloc d'un système de contrôle d'attitude et d'orbite.
Crédit :
Gary Quinsac
Relations fonctionnelles du SCAO
Schéma des relations fonctionnelles entre le système de contrôle d'attitude et d'orbite et les autres sous-systèmes du satellite.
fournir un contrôle du spin et un pointage pour la charge utile, l'énergie, la communication et les systèmes de régulation thermique dans les modes nominal et de survie,
fournir un contrôle de l'attitude et de son taux de variation pour le transfert orbital et le maintien à poste,
fournir une connaissance de l'attitude suffisamment précise pour mener à bien les objectifs de la mission.
La détermination et le contrôle d'attitude nécessitent plusieurs outils qui seront développés dans la suite du cours.
Représentation d'attitude
L'attitude du satellite est exprimée par l'orientation de son repère par rapport à un référentiel standard (inertiel, orbital, fixé par rapport à un objet...), comme détaillé dans le chapitre sur la représentation d'attitude. Plusieurs outils existent, de la matrice du cosinus directeur aux quaternions, en passant par les angles d'Euler.
Détermination d'attitude
La détermination ou estimation d'attitude fait le liant entre les mesures fournies par les différents capteurs présents à bord du satellite et la connaissance de l'attitude. La détermination d'attitude nécessite au moins deux mesures de directions bien séparées. Il faut ici différencier les techniques de détermination directe d'attitude des techniques d'estimation :
les approches directes calculent la matrice de transformation directement à partir des vecteurs de mesure,
les techniques d'estimation nécessitent une connaissance initiale grossière de l'attitude et une estimation des sources d'erreur de mesure. Les techniques d'estimation peuvent incorporer plusieurs types de capteurs, prendre en compte des statistiques d'erreur et sont généralement plus précises que les méthodes dites "directes".
Contrôle d'attitude
Le contrôle d'attitude rentre dans le domaine de la théorie du contrôle. Des lois de contrôle doivent être implémentées afin d'amener le système d'un état initial donné à un état final souhaité, tout en respectant certains temps de réponse. Les asservissements mis en oeuvre doivent être les moins sensibles possible vis-à-vis des perturbations, qu'elles soient internes ou externes. Des actionneurs sont enfin chargés d'appliquer les corrections d'attitude ainsi déterminées.
Une distinction importante doit être effectuée entre les contrôles d'attitude passif et actif.
Le contrôle d'attitude passif se base sur l'utilisation des propriétés physiques du satellite et de son environnement pour contrôler l'attitude du véhicule. Cette technique exige un matériel moins complexe et généralement moins coûteux. Nous ne rentrerons pas dans le détail de ces techniques, mais l'on peut tout de même citer le contrôle d'attitude par gradient de gravité
le contrôle d'attitude actif, en revanche, est plus sophistiqué. Il permet d'obtenir des performances supérieures, c'est-à-dire des pointages beaucoup plus précis et des manœuvres plus rapides.
Boucle SCA
Boucle de contrôle d'attitude.
Crédit :
Gary Quinsac
Système de Guidage, Navigation et Contrôle
Lorsque l'on s'intéresse à l'orbite du satellite, on parle alors de guidage, navigation et contrôle (GNC). C'est une branche de l'ingénierie consacrée à la conception des systèmes de contrôle des véhicules (automobiles, bateaux, avions et satellites). La navigation répond à la question "où sommes-nous ?", le guidage à la question "comment aller à notre destination ?" et le contrôle "quelle commande donner au véhicule ?". En somme, cela concerne la détermination d'orbite et la majeure partie du contrôle, à l'exception de la réalisation du contrôle qui est prise en charge par le sous-système de propulsion. Ce sous-système joue un rôle essentiel dans le succès des missions qui impliquent un rendez-vous, de l'arrimage ("docking") et des opérations de proximité. Le logiciel de GNC se compose d'un filtre de navigation, d'un algorithme de guidage et d'un algorithme de contrôle. Ce sous-système doit ainsi :
fournir la position et la vitesse du satellite pour pointer les antennes et la charge utile,
fournir l'instant, la magnitude, la durée et la direction des poussées pour effectuer un transfert orbital et un maintien à poste,
fournir la position des autres corps pour piloter les éléments mobiles du satellite.
Il ne faut pas confondre le système GNC embarqué avec le système de dynamique de vol qui fait partie du segment sol. Le GNC doit faire face à des contraintes temporelles et de calcul beaucoup plus fortes, ce qui conduit généralement à des performances des logiciels en vol insuffisantes. Un suivi depuis le sol peut se faire a posteriori et ainsi fournir une mise à jour de paramètres tels que la trajectoire de référence. Les exigences du système GNC dépendent fortement du niveau d'autonomie attendu. L'autonomie à bord permet au segment spatial de continuer les opérations de mission et de survivre à des situations critiques sans avoir recours au segment sol. Plus l'autonomie est importante plus les coûts de développement sont importants, mais les coûts d'opération diminuent. De même, dans le cas de missions interplanétaires, la rareté des canaux de communication peut être une motivation pour limiter les interactions avec le segment sol. Rares ont été les satellites autonomes sur ce plan, même si nous pouvons citer SMART-1 de l'ESA et Deep Space 1 de la NASA. Dans la plupart des cas, une majeure partie des étapes nécessaires au contrôle d'orbite sont effectuées par le segment sol avant que des télécommandes soient transmises au satellite.
Navigation
À la manière de l'estimation d'attitude, l'objectif est d'obtenir une estimation de la position orbitale satisfaisant les exigences de la mission. La navigation est généralement implémentée sous la forme d'un filtre numérique joué par l'ordinateur de bord.
Guidage
Le guidage se sert de l'estimation fournie par la navigation et de la consigne mission pour calculer certains des points suivants :
les manœuvres pour atteindre l'objectif, qu'elles soient impulsionnelles (ΔV en sortie de la fonction) ou continues (profil de poussée en sortie de la fonction),
la trajectoire de référence (position et vitesse) pour une période future,
les éphémérides nécessaires au bon fonctionnement d'autres sous-systèmes, basées sur la nouvelle trajectoire.
La trajectoire de référence est calculée par le segment sol et peut être mise à jour durant la mission. Les écarts à cette référence doivent rester suffisamment faibles afin que le guidage puisse les compenser au moyen de faibles variations du profil de poussée. Ces écarts peuvent être dus à des perturbations extérieures, des erreurs d'exécution de manœuvre, des incertitudes de navigation ou des délais opérationnels.
Contrôle
En s'appuyant sur l'estimation de l'état du véhicule (position, vitesse) fournie par le filtre de navigation et sur la trajectoire de référence calculée par la fonction de guidage, la fonction de contrôle s'assure de la bonne exécution de la manœuvre et corrige les erreurs résiduelles. La fonction de contrôle traduit donc les manœuvres reçues en entrée dans le format exigé par la fonction qui s'occupe de la gestion des actionneurs.
Dans le cas de propulseurs, le contrôle établit des forces dans le référentiel du satellite qui seront obtenues en contrôlant le niveau de poussée durant une durée déterminée ou en contrôlant la durée d'une poussée de puissance constante. Une fonction de gestion de la propulsion se chargera de sélectionner le propulseur optimal pour fournir la force ainsi que de fournir les couples réclamés par la fonction de contrôle de l'attitude du satellite.
Digramme en bloc d'un SCAO
Boucle de contrôle d'un système GNC.
Crédit :
Gary Quinsac
Sonde SMART-1
Vue d'artiste de la sonde spatiale SMART-1 sur le chemin de la Lune. Elle était équipée d'un système de propulsion ionique et d'un système de GNC autonome.
Crédit :
ESA
Modes SCAO
Une fois séparé du lanceur, le satellite va parcourir une série de modes jusqu’à la fin de la mission. Des modes nominaux vont lui permettre de maintenir son attitude, atteindre son poste, déployer ses panneaux solaires et son antenne, le tout afin de se mettre en ordre de marche pour sa mission. Si nécessaire, ces modes d’opération peuvent être interrompus afin de réaliser son maintien à poste, la décharge du moment cinétique des roues à inertie ou répondre à un incident. Différents équipements sont utilisés en fonction de ces modes et certains sont cités en exemple dans la figure 1. On associe aux modes des exigences qui découlent des exigences mission, par exemple :
Les exigences sur la détermination d'attitude dérivent de plusieurs exigences mission, notamment celle de décrire correctement la position d'une observation dans l'espace, ou peuvent découler d'une allocation d'une exigence de pointage de plus haut niveau (par exemple, afin de pointer un objet avec une certaine précision on a besoin de déterminer l'attitude avec telle précision).
Parmi les exigences de pointage, on peut citer la définition de la cible et de ce qui doit la pointer (sous-système, instrument etc.). Les exigences peuvent ensuite être classées en 2 catégories : la précision et la stabilité de pointage.
La précision de pointage est une partie du budget total de pointage de la charge utile, dans lequel se trouvent également des effets mécaniques, thermiques et de mesure.
La stabilité de pointage découle habituellement des exigences de résolution des instruments. En effet, des mouvements à haute fréquence du satellite ont tendance à dégrader la résolution.
L'agilité du satellite est souvent nécessaire à une mission pour passer d'un pointage à un autre en un certain temps. Ces exigences ont tendance à contraindre le choix des actionneurs et des méthodes de contrôle.
La phase dite d'acquisition concerne les satellites équipés de panneaux solaires pour la génération d'énergie. Elle intervient au tout début de la mission, une fois que le satellite est séparé du lanceur, et consiste à stabiliser le satellite et à pointer ses panneaux solaires vers le Soleil avant que ses batteries ne se soient vidées. La connaissance précise du lanceur est essentielle afin de prendre en compte l'ensemble des conditions initiales possibles lors de la conception.
Des exigences concernent églament la fiabilité et la survie. Il faut déterminer le niveau de fiabilité/redondance nécessaire pour récupérer d'anomalies, ce que le SCAO doit faire en réponse à une anomalie...
Modes SCAO
Modes SCAO typiques avec des exemples associés. Après une phase d'initialisation débutée par la séparation et le déploiement et conclue par le transfert d'orbite, le satellite entre dans un mode d'opérations nominales.
Crédit :
Gary Quinsac
Comprendre
Auteur: Gary Quinsac
Réferentiels et transformations
Auteur: Gary Quinsac
Systèmes de coordonnées
Auteur: Gary Quinsac
Généralités
Afin de déterminer la position et l'orientation d'un objet dans l'espace, on fait appel aux systèmes de coordonnées. Dans cette partie, il ne faudra pas confondre les notions de référentiel et système de coordonnées. Un système de coordonnées est notamment défini par son centre (on parle de référentiels géocentrique ou héliocentrique), son plan de référence (équatorial, écliptique) et ses axes. En ce qui concerne les systèmes de coordonnées, on a pour habitude d'utiliser les suivants :
systèmes de coordonnées rectangulaires (ou cartésiennes), qui à un point de l'espace font correspondre trois distances sur chacun des axes du repère;
systèmes de coordonnées cylindriques, qui décrivent la position d'un point à l'aide d'une distance au centre, d'un angle et d'une hauteur;
systèmes de coordonnées sphériques, qui à un point de l'espace associent une distance au centre et deux angles. Ce type de système est couramment utilisé en géographie et en astronomie.
Système de coordonnées inertiel
Un référentiel inertiel (ou galiléen) est un référentiel dans lequel le principe d'inertie est vérifié. Tout corps libre est en mouvement de translation rectiligne uniforme ou au repos. Tout référentiel en mouvement de translation rectiligne et uniforme par rapport à un référentiel inertiel est lui-même inertiel. Les lois de la mécanique sont invariantes par changement de référentiel inertiel. On a l'habitude de distinguer un référentiel considéré comme fixe par rapport à un objet en rotation, comme le repère terrestre, avec un repère dont les axes sont fixés par rapport à une position absolue.
Termes d'inertie
Dans un référentiel non inertiel, par exemple animé d’un mouvement accéléré par rapport à un référentiel galiléen, il faut faire intervenir les termes d’inertie (comme détaillé par la suite). Ces termes se traduisent par des pseudo-forces, qui se distinguent des forces prises en compte dans un référentiel galiléen car elles ne sont pas associées à une interaction entre le corps dont on étudie le mouvement et un autre corps.
Systèmes de coordonnées célestes
En astronomie, on utilise habituellement les repères cylindriques et sphériques amputés de leur coordonnée de distance. Pour des raisons pratiques, on suppose souvent que les objets observés se situent à des positions fixes à l'intérieur de la sphère céleste, à condition que leur distance soit suffisante.
Un système de coordonnées céleste a pour fonction de déterminer une position dans le ciel. Il existe plusieurs systèmes, utilisant une grille de coordonnées projetée sur la sphère céleste, de manière analogue aux systèmes de coordonnées géographiques utilisés à la surface de la Terre. Les systèmes de coordonnées célestes diffèrent seulement dans le choix du plan de référence, qui divise le ciel en deux hémisphères le long d'un grand cercle (le plan de référence du système de coordonnées géographiques est l'équateur terrestre). Chaque système est nommé d'après son plan de référence.
Système de coordonnées horizontales
Coordonnées horizontales
Les coordonnées horizontales locales sont la hauteur (h) et l'azimut (A). La hauteur varie de 0° (horizon) jusqu'à 90° (zénith) et l'azimut est mesuré sur le plan horizontal à partir du Nord (N). Un objet de hauteur négative n'est pas visible depuis le lieu d'observation.
Crédit :
Wikipedia
Le système de cordonnées horizontales, également appelé système local ou système de coordonnées alt-azimutales, est un système de coordonnées célestes utilisé en astronomie par un observateur au sol. Le système, centré sur l'observateur, sépare le ciel en deux hémisphères : l'un situé au-dessus de l'observateur et l'autre situé au-dessous, caché par le sol. Le cercle séparant les deux hémisphères, appelé horizon céleste, situe le plan horizontal. L'altitude (ou élévation, "h") et l'azimut (A), qui constituent les deux principales coordonnées de ce système, sont définis à partir de ce plan.
L'altitude est l'angle entre l'objet et l'horizon local de l'observateur. Pour les objets visibles, cet angle est compris entre 0° (horizon) et 90° (zénith).
L'azimut est l'angle de l'objet autour de l'horizon. C'est un cercle divisé en 360° établi sur le plan horizontal depuis le nord vers l'est (des exceptions à cette convention existent).
Ce système de coordonnées présente l'avantage d'être simple et local. Il est facile à établir à un endroit donné à partir du moment où l'observateur sait où se trouve l'un des points cardinaux. C'est la raison pour laquelle il est particulièrement utilisé par les télescopes au sol à monture azimutale, c'est à dire l'essentiel des télescopes les plus récents.
Système de coordonnées équatoriales
Coordonnées équatoriales projetées sur la sphère céleste
Un système équatorial est projeté sur la sphère céleste. Les longitude (α) et latitude (δ) d'un objet sont indiquées.
Crédit :
Gary Quinsac
Le système de coordonnées équatoriales est un système de coordonnées célestes dont les valeurs sont indépendantes de la position de l'observateur. Ceci est également vrai pour les systèmes de coordoonées écliptiques et galactiques. Ce système utilise comme plan de référence la projection de l'équateur de la Terre sur la sphère céleste. Cette projection s'appelle l'équateur céleste. Elle divise le ciel en deux hémisphères, chacun ayant comme axe de référence la projection d'un pôle terrestre, perpendiculaire à l'équateur céleste. À partir de ces divisions, le système permet d'établir deux coordonnées angulaires : l'ascension droite et la déclinaison.
L'ascension droite (α) est l'angle mesuré sur l'équateur céleste à partir d'un axe pointant vers un point de référence, le point vernal, correspondant à l'intersection entre l'équateur céleste et l'écliptique. À partir de cet axe, l'angle est mesuré vers l'Est et comporte 24 divisions principales de 15° chacune, nommées « heures ». Chacune des heures se divise en minutes, et en secondes. Cette division de l'angle en heures, minutes et secondes permet de déterminer facilement combien de temps (en temps sidéral) il faudra à un astre pour atteindre un certain point dans le ciel.
La déclinaison (δ) est l'angle mesuré perpendiculairement entre l'équateur céleste et l'objet céleste observé. Elle se mesure en degrés, positifs pour les objets situés dans l'hémisphère nord et négatifs pour ceux de l'hémisphère sud. La déclinaison varie ainsi de -90° (pôle sud) à +90° (pôle nord) en passant par 0° à l'équateur céleste. L'ascension droite et la déclinaison sont les équivalents astronomiques de la longitude et de la latitude.
Système de coordonnées écliptiques
Coordonnées écliptiques projetées sur la sphère céleste-
Un système écliptique est projeté sur la sphère céleste. Les longitude (λ) et latitude (β) d'un objet sont indiquées.
Crédit :
Gary Quinsac
Le système de coordonnées écliptiques est un système de coordonnées adapté aux objets célestes : il utilise le plan de l'écliptique (plan de l'orbite de la Terre autour du Soleil) comme plan de référence. Ce plan fait un angle d'approximativement 23° avec le plan équatorial terrestre, du fait de l'inclinaison de l'axe de rotation de la Terre. Ce repère est un système sphérique à deux dimensions.
La longitude écliptique (λ) est l'angle entre le point vernal (le même que pour le système de coordonnées équatoriales), le centre du repère (le soleil) et la projection de l'objet sur ce plan. Cet angle se mesure en degrés.
La latitude écliptique (β) représente l'angle entre le plan de l'écliptique, le centre du repère (le soleil) et l'objet.
Ce système peut être centré sur la Terre, le Soleil ou tout autre corps. Il est particulièrement utile pour les objets situés dans le système solaire.
Système de coordonnées galactiques
Coordonnées galactiques projetées sur la sphère céleste
Un système galactique est projeté sur la sphère céleste. Les longitude (l) et latitude (b) d'un objet sont indiquées.
Les coordonnées galactiques sont adaptées aux objets situés dans notre galaxie et non situés dans le voisinage proche du Soleil. Les coordonnées galactiques sont un repérage effectué à l'aide d'une latitude et d'une longitude définies de telle sorte que le plan galactique correspond à l'équateur, et l'origine des longitudes corresponde au centre galactique. Le système de coordonnées galactiques est un système de coordonnées célestes qui prend en compte la rotation de la Galaxie sur elle-même. On parle ici aussi de longitude et de latitude galactiques. Le plan de référence de ce système est le plan de la Galaxie centré sur le centre galactique. Le pôle nord galactique a été défini par convention dans le repère équatorial par une ascension droite de 12 h 51 min 26,282 s et une déclinaison de 27°07′42.01″. Dans ce plan, la direction de référence de la mesure est la direction du centre de la Galaxie.
La longitude galactique (l) est l'angle entre cette direction de référence et la projection de l'objet sur le plan de la galaxie. La longitude galactique vaut 0° dans la direction du centre de la Galaxie.
La latitude galactique (b) est la mesure de l'angle entre le plan de référence et l'objet avec le Soleil au centre. Elle mesure en degrés la hauteur de cet objet de 0° dans le plan de référence à 90° au pôle nord galactique.
Appliquette interactive
Une appliquette interactive est disponible ici. Elle permet d'afficher les trois principaux systèmes de coordonnées célestes en 3D.
Résumé des propriétés des systèmes de coordonnées usuels
Système de coordonnées
Origine
Plan fondamental
Pôles
Coordonnées
Direction principale
Latitude
Longitude
Horizontal
Observateur
Horizon
Zénith / Nadir
Élévation
Azimuth (A)
Point nord
Équatorial
Centre de la Terre (géocentrique) / du Soleil (héliocentrique)
Équateur céleste
Pôles célestes
Déclinaison (δ)
Ascension droite (α)
Point vernal
Écliptique
Écliptique
Pôles écliptiques
Latitude écliptique (β)
Longitude écliptique (λ)
Galactique
Centre du Soleil
Plan galactique
Pôles galactiques
Latitude galactique (b)
Longitude galactique (l)
Centre galactique
Systèmes de coordonnées spatiaux
Dans le cadre de l'analyse de l'attitude et de l'orbite d'un satellite, certains référentiels sont particulièrement utilisés. Les plus importants d'entre eux sont présentés dans cette partie.
Appliquette interactive
Une appliquette interactive est disponible ici. Elle permet de visualiser dans l'espace une partie des repères spatiaux qui vous sont présentés dans cette partie.
Référentiel héliocentrique
Le référentiel de Kepler (ou référentiel héliocentrique) est le référentiel centré sur le centre de masse du Soleil et dont les axes pointent vers des étoiles fixes. Ce référentiel inertiel est utilisé pour les missions interplanétaires. Ces étoiles sont suffisamment lointaines pour qu'elles apparaissent fixes aux échelles de temps considérées.
Le repère HSEa (pour "heliocentric solar ecliptic inertial") est un exemple de repère héliocentrique. Son axe X pointe vers le point vernal, Z vers le pôle nord écliptique et Y complète le trièdre.
Référentiel géocentrique (ECI)
Le référentiel géocentrique ("Earth Centered Inertial"ou ECI en anglais) est un référentiel dont l'origine est le centre de la Terre et dont les trois axes pointent également vers des étoiles fixes. L'origine du système se situe au centre géométrique de la Terre, l'axe Z est aligné avec le pôle nord, l'axe X pointe vers le point vernal et l'axe Y complète le trièdre. D'autres systèmes de ce type existent, définis par rapport à d'autres directions. La bonne connaissance de la position des étoiles permet de déterminer l'orientation du satellite dans ce référentiel par observation de ces étoiles.
Parmi ces référentiels, on peut citer J2000 GCI (pour "geocentric inertial"). Son axe Z est aligné avec le pôle nord, l'axe X pointe vers le point vernal au 1er janvier 2000 et l'axe Y complète le trièdre. Ce repère est équatorial.
Point vernal "vrai"
Le point vernal "vrai" se déplace chaque année en raison de la précession des équinoxes (mouvement de l'axe de rotation de la Terre) et du lent déplacement des étoiles. De ce fait on définit un point vernal fixe conventionnel (celui du 1er janvier 2000 pour le repère J2000).
Référentiel terrestre (ECEF)
Le référentiel terrestre ("Earth-Centered, Earth-Fixed" ou ECEF en anglais) est un référentiel centré sur le centre de masse de la Terre et dont les trois axes sont liés au globe terrestre. Ce référentiel est en mouvement de rotation pure dans le référentiel géocentrique. L'axe coïncide avec l'axe de rotation de la Terre et les axes et sont fixés par rapport à la Terre.
Remarque
Le référentiel géocentrique se distingue du référentiel terrestre, dont l'origine est prise au centre de la Terre, mais dont les axes sont attachés au globe terrestre. Il est également différent du référentiel héliocentrique, dont les axes pointent vers des étoiles lointaines mais dont l'origine est prise au centre du Soleil. Ainsi, le référentiel terrestre est en rotation dans le référentiel géocentrique, lui-même en translation circulaire dans le référentiel héliocentrique. La position et l'orientation d'un satellite par rapport à un tel système doivent être connues afin de maintenir une communication avec le sol ou de réaliser de la détection terrestre.
Repère orbital
Les repères orbitaux sont liés à l'orbite du satellite et à sa position sur cette orbite. Ils tournent à mesure que le satellite orbite autour de la Terre afin qu'un axe pointe dans une direction particulière, tandis que les deux autres sont normaux. On peut citer différents repères orbitaux. Généralement, l'axe pointe vers le nadir et l'axe est normal au plan orbital.
Pour les satellites pointant la terre, l'orientation/vitesse angulaire du corps du satellite est définie par rapport à un repère fixé sur l'orbite.
Pour les satellites poitant la Terre il est utile de définir un repère par rapport à la géocentrique (droite passant par le centre de la Terre et le centre de masse du satellite). Le repère LVLH, pour "Local-Vertical/Local-Horizontal", est un repère très utilisé. Son axe est ainsi aligné avec le nadir, son axe pointe le long de l'inverse du moment cinétique orbital. L'axe vient compléter le trièdre.
On définit également souvent un repère orbital se référant au vecteur vitesse du satellite. Par exemple, est parallèle au vecteur vitesse du satellite, est le vecteur normal à la trajectoire à la position du satellite dans le plan de l'orbite et orienté vers le centre de la Terre, et est parallèle et de même sens que le moment cinétique orbital.
Référentiel satellite
Le référentiel du satellite est défini par le corps du satellite. On a l'habitude de définir le repère satellite avec l'orientation d'un élément de navigation essentiel comprenant les capteurs d'attitude les plus critiques et les instruments de la charge utile. Le SCA utilise une combinaison de capteurs et d'actionneurs pour maintenir l'orientation et la vitesse angulaire du référentiel du satellite par rapport à un repère extérieur de référence. Celui-ci dépend généralement du type de pointage requis par la mission (inertiel, solaire, nadir etc).
On peut décrire l'orientation du satellite par rapport au référentiel orbital avec une séquence d'Euler de roulis, tangage et lacet (détaillée ici), respectivement autour des axes , et .
Repère instruments
Un repère instrument est aligné suivant les directions caractéristiques de l'instrument. Ces repères sont définis par rapport au repère satellite ou par rapport à un repère secondaire, lui-même défini par rapport au repère satellite. L'alignement entre les différents référentiels est mesuré sur le sol mais peut évoluer pendant le lancement, mais également à cause du changement de gravité et des distorsions thermiques. Un instrument peut d'ailleurs être positionné sur un bras articulé (cela se rencontre surtout sur les sondes planétaires). La connaissance précise de l'attitude nécessite un étalonnage en vol de ces changements d'alignement et distorsions. Les données et les commandes de la charge utile et des capteurs sont paramétrées par rapport aux systèmes de coordonnées locaux.
Représentation d'attitude
Auteur: Gary Quinsac
Introduction
L'orientation d'un satellite dans l'espace correspond à l'orientation du repère fixé sur son corps par rapport à un autre repère, tel que ceux vus précédemment. Ainsi, la détermination d'attitude d'un satellite en particulier requiert des méthodes d'estimation de la matrice orthogonale transformant des vecteurs d'un référentiel de référence fixé dans l'espace à un référentiel fixé par rapport au corps du satellite. De plus, une mission spatiale ne peut être définie par un unique référentiel. En fonction des besoins, de l'échelle à laquelle on se place, il est nécessaire d'utiliser tel ou tel référentiel. Dès lors, le passage d'un référentiel à un autre devient un aspect crucial du SCAO. L'une des plus importantes propriétés des matrices d'attitude est énoncée par le théorème d'Euler.
Théorème d'Euler
L'orientation instantanée d'un objet peut toujours être décrite par une unique rotation autour d'un axe fixe.
On peut parler de pôle eulérien pour nommer le centre de rotation. Il doit son nom au mathématicien et physicien suisse Leonhard Euler. Dès lors qu'un point d'un solide reste fixe lors d'un déplacement, ce déplacement est équivalent à une rotation autour d'un axe passant par le point fixe (pôle eulérien). En algèbre linéaire, ce théorème implique que deux référentiels cartésiens partageant la même origine sont reliés par une rotation autour d'un axe fixe.
Leonhard Euler
Portrait par Johann Georg Brucker (1756).
Crédit :
Domaine public
Les relations permettant de jongler entre les systèmes de coordonnées peuvent être charactérisées de différentes manières, comportant chacune leurs lots d'avantages et inconvénients. Certaines d'entre elles sont présentées dans la partie suivante :
Les démonstrations des principales relations sont proposées en exercices.
Matrice du cosinus directeur
La façon la plus évidente de donner l'orientation d'un référentiel par rapport à un autre est d'exprimer leurs vecteurs de base dans l'autre repère.
Changement de repère en 2D
Une introduction simple à ce changement de repère peut être faite en 2D. Prenons un référentiel , avec les axes et , incliné par rapport à un référentiel , d'axes et , d'un angle . Le vecteur peut être exprimé dans ces deux systèmes sous forme matricielle : et .
La relation entre les deux systèmes de coordonnées peut être décrite par une matrice de cosinus directeur (MCD), ou matrice de rotation, variant avec . Cette matrice transforme le vecteur du premier référentiel vers le second .
Les éléments de la MCD correspondent aux produits scalaires des vecteurs de base. Le produit scalaire entre deux vecteurs unitaires correspond au cosinus de l'angle formé par ces vecteurs.
Appliquette interactive
Une appliquette interactive est disponible ici. Elle revient sur le changement de repère en 2D en permettant de projeter les coordonnées d'un point dans un référentiel en rotation par rapport à un autre.
Généralisation à l'espace à 3 dimensions
En 3 dimensions la MCD est une matrice de passage 3x3. L'expression d'un vecteur dans à partir de son expression dans s'écrit :
avec
On dit que la MCD décrit l'orientation de par rapport à . On l'appelle également matrice de rotation ou matrice de transformation des coordonnées de vers .
Rotations élémentaires
Trois rotations élémentaires de autour de chacun de ses trois axes se retrouvent décrites par les matrices de rotation suivantes :
, et
où indique une rotation d'angle autour du i-ème axe du référentiel fixé sur le corps.
Propriétés de la MCD
La MCD est une matrice orthogonale, ce qui signifie que son inverse est égal à sa transposée :
et
Les transformations successives entre référentiels peuvent être déterminées par une série de multiplications matricielles. Par exemple, la transformation du référentiel inertiel au référentiel du satellite peut être décomposée de la manière suivante : transformation du référentiel inertiel au référentiel fixé sur la Terre multipliée par la transformation du référentiel fixé sur la Terre au référentiel orbital, le tout multiplié par la transformation du repère orbital au repère du satellite.
Limitations de cette représentation
Malgré certains avantages, la MCD n'est pas toujours la représentation la plus adaptée. Elle utilise 9 paramètres pour décrire une orientation, parmi lesquels seulement 3 sont indépendants.
Angles d'Euler
Présentation des angles d'Euler
Les angles d'Euler sont les angles introduits par Leonhard Euler pour décrire l'orientation d'un solide. Ils peuvent être utilisés pour définir l'orientation d'un référentiel par rapport à un autre. On obtient une rotation en faisant varier l'un des trois angles d'Euler et une séquence de 3 rotations est suffisante pour décrire n'importe quelle transformation. La première rotation est effectuée selon n'importe quel axe, tandis que les deux suivantes ne peuvent jamais être effectuées autour d'un axe utilisé par la rotation précédente. Au total, 12 jeux d'angles d'Euler existent : (1,2,1), (1,2,3), (1,3,1), (1,3,2), (2,1,2), (2,1,3), (2,3,1), (2,3,2), (3,1,2), (3,1,3), (3,2,1), (3,2,3). L'ordre des rotations et la valeur des angles ne sont pas uniques et sont sujets à des singularités mathématiques.
Exemples
Appliquette interactive
Une appliquette interactive est disponible ici. Elle permet de visualiser dans l'espace les séquences d'Euler qui sont introduites dans cette section à titre d'exemple.
La séquence d'Euler la plus connue, nommée d'après lui, est la séquence (3,1,3). Elle a notamment été utilisée pour étudier le mouvement gyroscopique avec les trois rotations successives :
La précession, autour de l'axe Oz, fait passer de (O,x,y,z) au référentiel (O,u,v,z) (en bleu).
La nutation, autour de l'axe Ou (ligne des nœuds), fait passer de (O,u,v,z) à (O,u,w,z’) (en vert).
La giration, ou rotation propre, autour de l'axe Oz’, fait passer de (O,u,w,z’) au référentiel lié au solide (O,x’,y’,z’) (en rouge).
Cette séquence peut également être utilisée pour décrire les paramètres orbitaux d'un satellite par rapport au référentiel inertiel centré sur la Terre. La première rotation correspond alors à l'angle du noeud ascendant, , autour de l'axe . La deuxième rotation est l'inclinaison, , autour de la ligne de noeuds. La dernière rotation est l'anomalie vraie, , autour de la normale à l'orbite.
Les angles d'Euler décrivent une rotation unique, ce qui est généralement un avantage par rapport à la MCD. Cependant, à une orientation donnée correspondent plusieurs jeux d'angles d'Euler.
De la séquence d'Euler à la MCD
Quelle que soit la séquence d'Euler, la MCD peut facilement être obtenue en multipliant les matrices de rotation élémentaires. Soit la séquence particulière suivante, décrivant l'orientation du référentiel par rapport au référentiel :
, donc :
Nous avons utilisé les notations et .
Limites de cette représentation
D'une manière générale, les angles d'Euler déterminent une orientation unique, ce qui est un avantage sur la MCD. Des singularités apparaissent lorsque le deuxième angle d'Euler aligne les premier et troisième axes de rotation. Dans ce cas, cette description d'attitude à 3 degrés dégénère en une description à seulement 2 degrés de liberté. Cette condition est réalisée lorsque l'angle vaut 90 et 270 degrés pour les 6 rotations où les premier et troisième axes sont différents, et lorsque l'angle vaut 0 et 190 degrés pour les 6 rotations où les premier et troisième axes sont identiques.
Séquence d'Euler pour les paramètre orbitaux
La séquence d'Euler (3-1-3) correspond aux paramètres orbitaux habituellement utilisés pour un satellite en orbite terrestre : le nœud ascendant (), l'inclinaison () et l'anomalie vraie ().
Crédit :
Gary Quinsac
Séquence d'Euler pour les roulis, tangage et lacet
La séquence d'Euler (3-1-2) correspond aux angles de roulis, tangage et lacet. Ils sont illustrés avec le satellite d'observation de la Terre SPOT 3.
Crédit :
Gary Quinsac
Quaternions
Auteur: Gary Quinsac
Représentation 3D
Afin de s'affranchir du problème de singularité rencontré avec les angles d'Euler, une représentation de l'attitude composée de 4 éléments est introduite sous le nom de quaternion (dont les éléments sont appelés paramètres d'Euler). Cette construction mathématique est présentée plus en détail dans la partie suivante.
Présentation des quaternions
Considérons l'axe fixe de la rotation présentée dans le théorème d'Euler, ou vecteur propre. C'est un vecteur unité possédant les mêmes composantes dans les référentiels de départ et d'arrivée : . Ainsi, 4 grandeurs sont requises pour décrire de façon non-ambigüe l'orientation par rapport à un référenciel : les 3 composantes de et l'angle de la rotation, .
Les quaternions sont une combinaison de ces éléments disposés dans un vecteur de 4 éléments . Le quaternion contient la même information qu'une MCD à 9 éléments, tout en s'affranchissant des problèmes de singularité rencontrés avec les angles d'Euler. Ils sont à la fois compacts et une représentation efficace de l'orientation pour la détermination d'attitude. Une même rotation est représentée par les quaternions et . On note également que les quatre paramètres d'Euler ne sont pas indépendants, mais contraints par la relation suivante :
Pour le vecteur propre , les paramètres d'Euler sont : , avec , , et .
Des quaternions à la MCD
De la même façon que l'on peut exprimer la MCD en fonction des angles d'Euler, elle peut être paramétrée en fonction d'un quaternion de la manière suivante :
Propriétés des quaternions
Il s'agit maintenant d'expliquer comment un quaternion vivant dans peut opérer sur un vecteur vivant lui dans . Notons tout d'abord qu'un vecteur est un quaternion pur dont la partie réelle est nulle. L'opérateur décrivant une rotation s'exprime avec le quaternion unitaire : . Le vecteur ainsi obtenu conserve la longueur du vecteur initial, comme le fait une rotation. Cet opérateur se développe de la manière suivante :
Afin de comprendre cette expression il est nécessaire d'avoir compris la partie suivante qui s'intéresse à l'algèbre des quaternions.
Les séquences de rotation peuvent facilement être décrites par une multiplication des quaternions représentant les rotations successives. Soient les quaternions et décrivant respectivement les opérateurs et . Le premier opérateur est appliqué au vecteur pour obtenir le vecteur , puis le second est appliqué à pour obtenir . La composition des opérateurs s'écrit :
Avantage des quaternions
Un avantage inhérent à cette représentation est que les équations de la cinématique deviennent purement algébriques et ne contiennent plus de fonctions trigonométriques.
Présentation mathématique
Les quaternions sont un système de nombres premièrement décrits par William Rowan Hamilton en 1843 appliqué à la mécanique et à l'espace à 3 dimensions.
William Rowan Hamilton
Sir William Rowan Hamilton (04/08/1805 - 02/09/1865) est un mathématicien, physicien et astronome irlandais (né et mort à Dublin). Outre sa découverte des quaternions, il contribua également au développement de l'optique, de la dynamique et de l'algèbre. Ses recherches se révélèrent importantes pour le développement de la mécanique quantique.
William Rowan Hamilton
Peinture de Sir William Rowan Hamilton.
Crédit :
Domaine public
Définition mathématique
Un quaternion q est une expression de la forme :
où , , , sont des nombres réels, et , , sont des symboles respectant les relations quaternioniques :
Par analogie avec les nombres complexes, est appelé partie réelle de et est appelé partie imaginaire.
L'ensemble des quaternions est un espace vectoriel de dimension 4 et de base où s'applique l'addition composant par composant. Soient deux quaternions et :
Afin d'introduire la multiplication, il faut d'abord introduire le produit hamiltonien. Les produits des éléments de base , et sont définis de la manière suivante :
La multiplication de quaternions est associative et distributive, mais pas commutative en général. Pour les quaternions q et p elle est définie par :
Elle peut être représentée par une multiplication matricielle. Dans ce cas, une matrice composée de valeurs du premier quaternion vient multiplier le second quaternion, tel que :
avec .
Le conjugué, la norme et l'inverse des quaternions et sont :
et
et
Autre représentation
Une autre façon de présenter un quaternion consiste à dire que est la partie scalaire de et est la partie vectorielle. Ainsi, la partie scalaire est toujours réelle et la partie vectorielle toujours purement imaginaire. Bien que l'on ait dit qu'un quaternion est un vecteur dans un espace à 4 dimensions, il est courant de définir un vecteur pour la partie imaginaire d'un quaternion : et
Equations du mouvement
Auteur: Gary Quinsac
Introduction à la cinématique et la dynamique
Maintenant que nous avons étudié les différentes façons de décrire l'orientation d'un repère à l'instant t, nous pouvons introduire la notion de mouvement. Les équations du mouvement sont un aspect essentiel de la conception et de la réalisation d'un système de contrôle d'attitude car elles régissent la position au cours du temps des objets considérés. Ces équations peuvent être séparées en deux catégories :
Lorsque nous étudions l'orientation relative de deux référentiels en fonction du temps, nous sommes dans le domaine de la cinématique. Elle recouvre les aspects du mouvement qui peuvent être analysés sans considérer les forces et les couples.
À l'instant où les forces et les couples sont introduits, on entre dans le domaine de la dynamique.
Afin de clarifier les choses, prenons une particule ponctuelle de la physique newtonienne. Si représente sa position, sa vitesse et que les dérivées temporelles sont indiquées par un point, alors l'équation cinématique du mouvement s'écrit . L'équation dynamique du mouvement quant à elle s'écrit dans un repère galiléen ou , avec la quantité de mouvement, la résultante des forces appliquées et la masse de la particule. Comme vous le verrez par la suite, dès lors que l'on s'intéresse aux mouvement d'attitude (autour du centre d'inertie), les vecteur de position et de vitesse sont respectivement remplacés par la matrice d'attitude et le vecteur de vitesse angulaire . Les forces et quantités de mouvement sont quant à elles remplacées par le couple et le moment angulaire . La cinématique et la dynamique du mouvement rotationnel, ou d'attitude, sont plus compliquées que celles du mouvement de translation. Elles sont détaillées dans la section suivante.
La cinématique est l'étude du mouvement en fonction du temps indépendammant des causes produisant ce mouvement. Elle est utilisée pour décrire la trajectoire du centre de masse d'un satellite dans l'espace.
Bases de la cinématique
Des cours sur ce sujet existent un peu partout, nous rappellerons simplement quelques notions de base ici :
Le vecteur position d'un objet dans un repère est le vecteur allant de l'origine du repère au centre de l'objet
Le vitesse de l'objet dans ce repère s'exprime :
L'accélération de M dans ce même référentiel est :
Dans le cas d'un mouvement circulaire, chaque point du corps tourne dans un cercle. La position de tout point peut ainsi être décrite par un angle par rapport à sa position originelle
Si est un vecteur unitaire dans la direction de l'axe de rotation, la vitesse angulaire est alors obtenue par :
La vitesse linéaire d'un point du corps en rotation s'exprimer alors :
Dans le cas d'un mouvement circulaire, chaque point du corps tourne dans un cercle.
Cinématique et changement de référentiels
Dans notre domaine, nous sommes constamment contraints de passer d'un repère à un autre pour décrire la trajectoire d'un objet. En cas de référentiels en rotation, tels qu'un référentiel fixé par rapport à la Terre et un référentiel inertiel, passer de l'un à l'autre nécessite d'introduire des termes supplémentaires. Par exemple, si l'on veut décrire la position, la vitesse et l'accélération d'une particule dans un référentiel inertiel noté à partir de sa position dans un référentiel terrestre (fixé par rapport à la Terre) noté , on peut écrire :
Nous avons utilisé la dérivée de la MCD qui est introduite dans le chapitre sur la cinématique d'attitude. Finalement :
Dans le réferentiel en rotation (celui fixé par rapport à la Terre), la deuxième loi de Newton peut alors être écrite :
où est l'accélération angulaire. On introduit ici les accélérations centripète et de Coriolis .
Cinématique d'attitude
La simulation et l'estimation d'attitude nécessitent généralement des représentations simples de l'attitude, telles que celles présentées dans le chapitre du même nom. Les équations différentielles de la cinématique peuvent ainsi être obtenues pour ces différentes représentations. Les démonstrations de ces équations sont proposées en exercices.
La cinématique d'attitude relie des vitesses angulaires à des orientations dans l'espace. Si cela peut sembler simple dans le cas d'une rotation autour d'un axe fixe, cela devient beaucoup moins intuitif dans le cas d'un mouvement plus général, où l'axe de rotation varie au cours du temps. Pour un corps en rotation autour d'un axe fixe, l'orientation par rapport à cet axe peut être déterminée en intégrant la vitesse angulaire ω, puisque .
MCD
Dans le cas général, la matrice exprimant le taux de variation de l'attitude est plus complexe. Considérons un référentiel en rotation par rapport à un référentiel avec une vitesse angulaire . Si la matrice d'attitude s'exprime , alors :
avec
La matrice d'attitude se retrouve multipliée par une matrice anti-symétrique qui est définie à partir du vecteur représentant la vitesse angulaire du référentiel par rapport au référentiel , avec .
Il est également possible d'exprimer cette équation différentielle en utilisant les angles d'Euler. En reprenant la séquence de rotations conduisant du référentiel au référentiel l'équation de la cinématique est réécrite :
En connaissant la vitesse angulaire d'un référentiel par rapport à l'autre en fonction du temps il est possible de déterminer la position au cours du temps d'un référentiel par rapport à l'autre. Néanmoins, l'intégration nécessite le calcul de fonctions trigonométriques ainsi que des singularités (ici ).
Quaternions
Dans le cas des quaternions, l'expression de l'équation de la cinématique se retrouve simplifiée :
Une écriture plus compacte est possible :
Contrairement aux angles d'Euler, les quaternions ne présentent pas de singularité géométrique. L'équation cinématique exprimée avec les quaternions ne possède pas de fonctions trigonométriques, ce qui rend les quaternions parfaitement adaptés aux calculs à bord réalisés en temps réel. Ainsi, les algorithmes de détermination d'attitude modernes sont généralement décrits en termes de quaternions.
Dynamique du satellite
Auteur: Gary Quinsac
Bases de la dynamique
Maintenant que nous nous tournons vers la dynamique d'attitude, il est important de bien différencier le mouvement de rotation d'un système du mouvement de son centre d'inertie. Nous allons nous concentrer sur le cas d'un corps rigide.
Force / Moment / Couple
Une force représente l'action d'un corps sur un autre. En revanche le moment d'une force par rapport à un point décrit l'aptitude de cette force à faire tourner un système autour de ce point. Le moment de la force par rapport à au point est défini par :
On parle de couple lorsqu'un ensemble de forces a une résultante nulle sur un système (leur somme vaut 0) alors que le moment résultant par rapport à un point est non nul. Dans ce cas, il est possible de montrer que le moment global d'un tel couple par rapport à n'importe quel point est égal au produit vectoriel caractéristique du couple :
où est le vecteur allant du centre de gravité du système au point d'application de la force . Si, pour un corps solide sans contraine, une force va accélérer son centre de masse, un couple aura lui pour effet d'induire un mouvement de rotation autour du centre de masse.
Remarque
On parle de couple pur lorsqu'une paire de forces d'intensité égale mais de directions opposées agissent à distance.
Propriétés d'inertie
Lorsque l'on parle du mouvement d'un solide autour de son centre d'inertie, il nous faut définir le tenseur d'inertie. Il s'exprime ainsi :
,
Les éléments diagonaux de ces expressions sont les moments d'inertie du solide par rapport aux divers axes, et les autres éléments sont les produits d'inertie. Les propriétés inertielles d'un solide sont donc totalement décrites par sa masse, la localisation de son centre d'inertie (ou centre de masse), et par les moments et produits d'inertie définis par rapport à des axes de références en un point particulier. Tous les solides ont un jeu d'axes principaux d'inertie dont l'origine se trouvent en son centre de masse et qui annule les produits d'inertie, rendant diagonale la matrice d'inertie.
Appliquette interactive
Une appliquette interactive est disponible ici. Elle illustre l'importance du choix des axes d'inertie dans le calcul de la matrice d'inertie.
Moment cinétique
L'analogie avec l'étude du centre de masse est une nouvelle fois possible. Le moment linéaire d'un corps solide, produit de la masse de ce corps par la vitesse de son centre de masse, est appelé quantité de mouvement, . Considérons un système matériel qui est la somme de masses ponctuelles. Le moment angulaire, ou moment cinétique, par rapport à un point est le moment de la quantité de mouvement par rapport à ce point :
On a également pour habitude d'exprimer le moment angulaire à partir de la matrice de moment d'inertie et de la vitesse angulaire :
Le passage de l'une à l'autre des expressions se fait en considérant que :
est le moment d'inertie d'une masse ponctuelle,
est le moment angulaire de la particule par rapport à l'origine.
Considérons un satellite solide avec un référentiel fixé sur son corps dont l'origine se trouve au centre de masse du satellite. Notons le vecteur vitesse angulaire du référentiel par rapport au référentiel inertiel .
Equation d'Euler
D'après la 2ème loi de Newton, dans un référentiel galiléen, la dérivée de la quantité de mouvement est égale à la somme des forces extérieures qui s'exercent sur le solide. Dans le cas du moment angulaire, son principe de conservation stipule que sa dérivée est égale à la somme des couples extérieurs qui s'exercent sur le corps :
où est le moment angulaire du corps solide par rapport à son centre de masse et sont les couples extérieurs agissant sur ce corps. On appelle parfois cette équation l'équation d'Euler. Elle montre que seuls les couples extérieurs peuvent modifier le moment cinétique dans un système.
Facteurs impactant l'attitude d'un satellite
Il est maintenant possible de réécrire cette équation en reprenant l'expression du moment cinétique présentée précédemment complétée par le moment angulaire stocké par n'importe quel objet en rotation dans le satellite :
Cette dernière équation permet de comprendre comment l'attitude d'un satellite peut être modifiée. En prenant les termes de cette équation de la gauche vers la droite, on retrouve d'abord les couples extérieurs, les objets embarqués en rotation (tels que les roues à inertie) et les modifications des moments d'inertie du satellite (qui peuvent notamment être dues à la perte de carburant au cours d'une mission).
En conclusion, les couples peuvent perturber l'attitude d'un satellite mais peuvent également être utilisés pour la contrôler. Les actionneurs doivent donc avoir une capacité suffisante pour contrer les couples perturbateurs tout au long de la mission si l'on veut un contrôle permanent de l'attitude du satellite.
Perturbations
Auteur: Gary Quinsac
Perturbations : introduction
Les faibles forces agissant sur un satellite sont connues pour dégrader la précision de pointage et engendrer des déformations mécaniques.
Des perturbations de différentes origines...
On peut distinguer les perturbations externes des perturbations internes au satellite. Dans la première catégorie on retrouve la pression de radiation solaire, la trainée atmosphérique ou pression dynamique, le couple magnétique dû au dipôle résiduel et le gradient de gravité. Les perturbations internes sont liées aux équipements présents dans le satellite. Si certains sont utilisés pour contrôler le satellite, comme les roues à inertie, la plupart sont à l'origine de couples perturbateurs. Parmi ces phénomènes, on retrouve les mécanismes tels que ceux utilisés pour les panneaux solaires ou les instruments mobiles, le désalignement et la quantification des actionneurs, le déplacement du carburant, l'incertitude sur le positionnement du centre de gravité, le frottement des roues à inertie ou encore le dégazage des polymères.
On remarque que les perturbations citées précédemment peuvent avoir deux types d'effets : séculaire ou cyclique. Les perturbations ayant un effet cyclique sont en moyenne nulles sur une orbite circulaire. Les perturbations séculaires s'accumulent durant une orbite et sont analogues à une force non-conservative. Or, on se souvient que les couples extérieurs sont proportionnels à la variation du moment cinétique du satellite. La gestion du moment cinétique va donc dépendre du type de perturbation auquel le satellite aura affaire. Suivant le pointage, certaines perturbations extérieures peuvent être cycliques ou séculaires. Dans le cas d'un pointage inertiel, on parle d'effets cycliques pour la traînée atmosphérique, le gradient de gravité et les couples magnétiques, alors qu'on parle d'effets séculaires pour les couples de pression de radiation solaire. Dans le cas d'un autre pointage classique, le pointage nadir, les couples magnétiques et de pression solaire ont des effets cycliques, à l'inverse de la trainée atmosphérique. Pour ce qui est des gradients de gravité, ils peuvent avoir les deux types d'effets.
Perturbations environmentales
Couples perturbateurs dus à l'environement du satellite.
Crédit :
Gary Quinsac
Couples subis par un CubeSat de 3U
Les couples maximums subis par un CubeSat de 3U autour de la Terre et Mars sont représentés (respectivement en traits pleins et pointillés). Mars n'ayant pas ou peu de champ magnétique et une atmosphère très ténue, les couples associés ne sont pas représentés car trop faibles.
Crédit :
Gary Quinsac
Couple cyclique ou séculaire : fonction du pointage
Le couple de pression de radiation solaire est plus ou moins constant dans le cas d'un pointage inertiel, à l'origine d'une accumulation du moment cinétique : c'est un couple séculaire. Au contraire, ce couple est moyennement nul sur une orbite pour un satellite effectuant un pointage nadir : on dit alors que le couple est cyclique.
Crédit :
Gary Quinsac
Gestion du moment cinétique
On peut voir l'accumulation du moment cinétique au cours d'une orbite dans le cas d'un couple séculaire, nécessitant de décharger celui-ci avec des actionneurs appropriés. En revanche le couple cyclique peut être stocké par un actionneur qui va se contenter de fournir un couple en opposition de phase tout au long de l'orbite.
Crédit :
Gary Quinsac
Perturbations externes
Auteur: Gary Quinsac
Champ magnétique
Certains corps célestes, dont la Terre, ont des champs magnétiques assez puissants pour induire d'importants effets dans l'espace environnant. Ce champ interagit avec tout autre champ magnétique qu'il rencontre. En général, les satellites ont eux-mêmes un certain niveau de moment magnétique résiduel qui se traduit par un champ magnétique propre relativement faible. Ils se comportent comme des dipôles magnétiques car ils sont parcourus par des boucles de courant. Ainsi, un courant de I ampères circulant dans une boucle plane d'aire A produit le moment dipolaire (en A.m) :
Des méthodes de compensation sont généralement mises en œuvre à bord. Si le moment magnétique résiduel d'un satellite n'est pas aligné avec le champ magnétique local un couple magnétique apparaît et modifie l'attitude du satellite. Le couple magnétique est donné par :
où (en T) représente le champ magnétique.
Champ magnétique terrestre
Bien que le champ magnétique de la Terre soit complexe, il est souvent suffisant de le modéliser tel un dipôle (30% d'erreur sont souvent considérés) et de déterminer la valeur maximum possible. Le couple maximum peut donc être estimé à partir du champ magnétique , où (en T.m3) est le moment magnétique terrestre multiplié par la constante magnétique, la distance entre le satellite et le centre du corps , et enfin une fonction sans unité de la latitude magnétique qui prend des valeurs allant de 1 au niveau de l'équateur magnétique à 2 aux pôles magnétiques. Des modèles utilisant des harmoniques sphériques existent, à la manière du champ gravitationnel terrestre, mais la précision qu'ils permettent d'atteindre n'est pas nécessaire lors des premières phases de développement du projet spatial. L'un de ces modèles, le "12th generation of the International Geomagnetic Reference Field (IGRF)", est utilisé pour calculer le champ magnétique obtenu sur une trajectoire circulaire de 500 km d'altitude inclinée de 50°. Celui-ci est représenté par rapport au plan local tangent ou repère NED ("North East Down"). On remarque qu'il varie grandement au cours de l'orbite.
Dipôle magnétique terrestre
La Terre peut être assimilée à un dipôle magnétique dont l'axe est incliné d'à peu près 11° par rapport à l'axe nord-sud géographique. Attention, le pôle sud magnétique se trouve du coté du pôle nord géographique.
Crédit :
Gary Quinsac
Champ magnétique terrestre sur une orbite
Champ magnétique sur une orbite terrestre circulaire de 500 km d'altitude et 50° d'inclinaison dans le référentiel NED.
Crédit :
Gary Quinsac
En dehors de quelques corps du système solaire, tels que la Terre et Jupiter, la plupart des régions de l'espace ne possèdent pas un champ magnétique suffisamment puissant et bien connu pour qu'un contrôle d'attitude magnétique puisse être utilisé par un satellite s'y trouvant.
Le gradient de gravité résulte de l'interaction du champ gravitationnel, lui-même proportionnel à l'inverse du carré de la distance, avec un satellite de masse non ponctuelle. L'accélération gravitationnelle est la plus forte sur la partie du satellite la plus proche du corps attracteur. Le gradient est à l'origine d'un couple qui peut être utilisé pour contrôler passivement l'attitude du satellite. Les couples de gradient de gravité apparaissent lorsque le centre de gravité d'un satellite en orbite n'est pas aligné avec le centre de masse par rapport à la verticale locale.
Centres de masse et de gravité
Le centre de masse, également appelé centre d'inertie, est le barycentre des masses d'un objet. Le centre de gravité, quant à lui, est le point d'application de la résultante des forces de gravité. Si ceux-ci sont souvent confondus, ce n'est plus le cas lorsque le champ de gravitation n'est plus uniforme dans le corps en question.
On exprime le gradient de gravité de la manière suivante :
où est le vecteur position allant du centre de gravité du satellite à l'élément de masse et est la force de gravité s'appliquant sur ce même élément de masse :
est la constante gravitationnelle, elle vaut , est la masse du corps attracteur et est le vecteur position de l'élément de masse dans le référentiel inertiel (). On peut finalement réécrire l'équation donnant le couple de gradient de gravité de la manière suivante :
Ce couple dépend de la matrice d'inertie du satellite. Différentes propriétés sont visibles dans cette équation : la magnitude est inversement proportionnelle au cube de la distance au centre du corps attracteur, sa direction est perpendiculaire au rayon vecteur et il disparaît lorsque l'un des axes principaux du satellite est aligné avec ce rayon vecteur.
Stabilisation par gradient de gravité
Cette technique de contrôle d'attitude passive est assez utilisée pour des satellites en orbite terrestre devant pointer au nadir. Elle consiste à faire intéragir un satellite de forme particulière avec le champ gravitationnel afin de contraindre son orientation. Une masse peut être montée au bout d'un mât perpandiculaire à l'orbite afin de créer un moment d'inertie minimum selon cet axe. Cette masse étant plus proche, elle est plus attirée. Le satellite aura alors tendance à aligner cet axe d'inertie vers la verticale à l'orbite (qui est la direction d'attraction gravitationnelle).
Crédit :
National Air and Space Museum, Smithsonian Institution.
Pression de radiation solaire
La pression de radiation solaire est la source dominante de couples perturbateurs dans l'espace interplanétaire (absence de traînée atmosphérique, faibles champs de gravité et magnétique). Même en orbite basse, on a pour habitude de considérer qu'il est dominant à des altitudes supérieures à 800 km. Il est important de noter que si le Soleil n'est pas l'unique source de radiation (il y a notamment l'albédo de la Terre et de la Lune, les rayons cosmiques...), il est de loin la plus importante. Le Soleil émet des photons, mais également des protons et des électrons (vent solaire). L'interaction entre la lumière du Soleil et la surface du satellite est habituellement modélisée comme une force de pression exercée sur un objet.
On modélise la surface du satellite comme une collection de surfaces d'aire , dont la normale orientée vers l'extérieur est notée dans le référentiel du satellite et de coefficient de réflexion (on lui attribue généralement une valeur de 0,6 pour un petit satellite).
Le vecteur allant du satellite au Soleil dans le référentiel du satellite s'écrit . L'angle entre ce vecteur et et la normale à la ième surface s'écrit alors :
La force de pression de radiation solaire exercée sur une surface peut alors s'exprimer de la manière suivante :
avec
où (en W.m) est l'irradiance solaire moyenne (fonction de la distance au Soleil) et (en m/s) est la vitesse de la lumière.
La différence entre les positions des centres de pression solaire et de masse aboutit à un couple de radiation solaire. Une telle différence dépend des surfaces éclairées, de l'incidence des rayons lumineux et de la répartition de la masse à l'intérieur du satellite. On note le vecteur allant du centre de masse du satellite au centre de pression de radiation solaire de la ième surface. Le couple de radiation solaire s'écrit alors :
Complément : coefficients de réflexion
Afin de gagner en précision, il est possible de détailler le coefficient de réflexion en une somme de trois coefficients dont le résultat vaut 1 :
La force de pression de radiation sur la ième surface s'exprime alors :
Complément : irradiance solaire
L'irradiance solaire représente la quantité d'énergie solaire reçue par une surface de 1 m2 située à une certaine distance r du Soleil et exposée perpendiculairement. Afin de la calculer, il faut considérer la conservation de l'énergie rayonnée dans l'espace et écrire :
avec le flux émis à la surface du Soleil et le rayon du Soleil. est estimé en appliquant la loi de Stefan-Boltzmann au Soleil considéré comme un corps noir :
avec la constante de Stefan-Boltzmann et la température thermodynamique du corps noir. À la distance moyenne Terre-Soleil (1 UA) l'irradiance solaire (ou constante solaire) vaut 1362 W.m-2.
Zone d'ombre
Afin de simuler la pression de radiation solaire, il ne faut pas oublier les zones d'ombres dans lesquelles le satellite peut se retrouver. Par exemple, en orbite basse autour de la Terre, un satellite peut passer une partie importante de son orbite caché des rayons du Soleil. L'approche la plus simple est de considérer que l'ombre de la Terre est une projection cylindrique du diamètre de la Terre le long de l'axe Soleil-Terre. Sur cette figure on remarque qu'en faisant le produit scalaire de vecteur unitaire (Terre-Soleil) on obtient l'inégalité suivante lorsque le satellite se trouve dans la zone d'ombre :
Géométrie du couple de pression de radiation solaire
Géométrie du couple de pression de radiation solaire. Chaque face du satellite exposée au Soleil subit une force qui, si elle est désaxée par rapport au centre de masse, engendre un couple.
Crédit :
Gary Quinsac
Zones d'ombre
Géométrie simplifiée du problème de zone d'ombre en orbite terrestre.
Crédit :
Gary Quinsac
Traînée atmosphérique
L'atmosphère ténue des corps célestes peut exercer une force de pression sur un satellite. Cela inclut toutes les interactions avec des particules non-chargées, comme les queues de comète, les poussières ou les éjectas. Dans le cas de la Terre, à quelques centaines de kilomètres d'altitude, ce couple peut être le plus important. De la même manière qu'avec le couple dû à la pression de radiation solaire, on calcule la force exercée par la traînée atmosphérique en considérant que le satellite est une collection de N surfaces d'aire Si. On définit de nouveau la normale orientée vers l'extérieur, notée , pour chacune des surfaces. La force s'exerçant sur chaque surface dépend de la vitesse relative du satellite par rapport à l'atmosphère. En première approximation, on considère que cette vitesse relative est égale à celle du satellite, mais en réalité ce n'est pas immédiatement la vitesse du satellite dans le référentiel inertiel, car l'atmosphère n'est pas stationnaire dans celui-ci. L'inclinaison de la ième surface par rapport à la vitesse relative du satellite s'exprime :
La force aérodynamique s'exerçant sur la ième surface est :
Dans cette équation, ρ est la densité atmosphérique et est le coefficient de trainée. Ce coefficient est déterminé de manière empirique et se situe généralement entre 1.5 et 2.5. Un couple apparaît lorsque la force agissant sur le centre de la pression atmosphérique ne passe pas par le centre de masse. Une estimation de ce couple est donnée par l'équation suivante :
où est le vecteur allant du centre de masse du satellite au centre de pression de la ième surface.
En principe, les couples aérodynamiques peuvent être utilisés pour effectuer un contrôle passif de l'attitude, comme les plumes d'une flèche, et même pour un contrôle actif avec des surfaces amovibles.
Perturbations internes
Bien que les CubeSats puissent généralement être modélisés comme un simple corps solide, de nombreuses raisons peuvent rendre la situation beaucoup plus complexe :
Certains satellites peuvent être composés de nombreux corps solides en mouvement de rotation ou de translation les uns par rapport aux autres. La dynamique des corps flexibles utilise généralement des méthodes de calcul par éléments finis. Parmi les raisons simples empêchant de traiter un satellite comme un corps rigide, on peut citer la présence de roues à inertie, de gyroscopes, de panneaux solaires motorisés ou de systèmes de déploiement.
Le déplacement des fluides, tels que le carburant ou les fluides cryogéniques est également une source de perturbations internes.
Les désalignements et la quantification des actionneurs peut aussi être une source de perturbations. Par exemple, un système de propulsion dont l'axe de poussée serait décalé par rapport à l'axe idéal créera des couples non désirés à chaque fois qu'il sera utilisé.
On qualifie ces couples internes de couples d'échange de moment cinétique car ils correspondent à un échange de moment cinétique entre des composants d'un satellite complexe sans que le moment cinétique du satellite dans son ensemble ne soit modifié.
Matériel
Auteur: Gary Quinsac
Introduction aux capteurs et actionneurs
Capteurs
Les capteurs se trouvent en amont de la chaîne du SCAO. Historiquement, les progrès réalisés se sont concentrés sur leur résolution et leur précision, leur masse, leur taille et leur puissance. À partir d'une référence, un capteur déduit son orientation dans l'espace ou sa vitesse de rotation. Le choix d'un capteur dépend de nombreux paramètres techniques, parmi lesquels :
les sources de référence disponibles :
les références externes : les étoiles, le Soleil, la Terre, le champ magnétique local,
la référence inertielle absolue (phénomènes d'inertie par conservation du moment cinétique),
l'orbite de la mission et les modes de pointage,
les exigences fonctionnelles et de performances.
Les capteurs se basent sur différents types de mesures permettant ainsi de les classer :
Les actionneurs sont des dispositifs conçus pour engendrer des forces ou couples capables de produire des mouvements du satellite. Les solutions existantes sont relativement variées et les principales peuvent être classées de la manière suivante :
Les actionneurs peuvent également être séparés en deux catégories. Ceux qui ne servent qu'au contrôle d'attitude, et ceux qui peuvent réaliser à la fois du contrôle d'attitude et du contrôle d'orbite.
Capteurs
Auteur: Gary Quinsac
Capteurs optiques
Les capteurs optiques fournissent l'orientation dans l'espace du repère du capteur, lui-même lié au repère du satellite, par rapport à des directions de références extérieures, telles que les étoiles, le Soleil et la Terre.
Capteurs stellaires
Un viseur d'étoiles ou capteur d'étoiles est un instrument optique qui repère les coordonnées d'une ou plusieurs étoiles et les compare ensuite aux éphémérides des étoiles enregistrées dans une bibliothèque inclue dans l'instrument. C'est l'instrument optique le plus précis (entre 1 et 10 secondes d'angle pour les plus performants). Il se compose d'un baffle afin d'éviter l'illumination par des éléments parasites tels que le Soleil, d'une partie optique chargée de collecter et focaliser la lumière sur un détecteur (CCD ou APS), d'une électronique de traitement du signal et d'un refroidisseur pour le détecteur. La matrice du détecteur est constituée de pixels qui permettent d'obtenir une image numérisée du champ de vue de l'instrument, chaque pixel étant repéré par ses coordonnées dans le repère lié au viseur stellaire. On détermine finalement la position d'une étoile en calculant le barycentre de l'énergie collectée sur les pixels éclairés. Les viseurs d'étoiles sont utilisés lorsqu'une connaissance fine de l'attitude est nécessaire. Ils ont besoin que la vitesse de rotation du véhicule soit contrôlée en amont afin de ne pas dépasser la vitesse de décrochage, vitesse au dessus de laquelle la lumière d'une étoile se trouve projetée sur de trop nombreux pixels durant la pose et ne permet plus la mesure.
Un capteur d'étoiles possède deux modes d'opération : le mode d'acquisition et le mode de suivi. Dans le premier, la position et la magnitude des objets brillants éclairant la matrice du détecteur sont comparées au catalogue d'étoiles afin de déterminer de façon grossière l'attitude du satellite sans information préalable. Une fois cette estimation de l'attitude intiale effectuée, le second mode permet le suivi sur la matrice des positions des étoiles identifiées. En sortie, un tel capteur est capable de fournir un quaternion d'attitude du repère capteur par rapport à un repère inertiel, tel que le repère J2000, et dans certains cas la vitesse de rotation du satellite.
Viseur d'étoile
Viseur d'étoiles ASTROP APS développé par l'agence spatiale nationale allemande DLT et la compagnie Jena-Optronik en Allemagne. Il est équipé d'une technologie de protection de radiation permettant de longues missions.
Crédit :
ESA, Jena-Optronik
Capteurs solaires
Les capteurs solaires permettent de déduire l'attitude du satellite de la mesure de l'angle d'incidence des rayons solaires sur le capteur. Ils sont classés en deux catégories : les capteurs analogiques et les capteurs digitaux. Dans les grosses missions satellitaires, ils permettent respectivement d'obtenir une précision de 1° à 0,1° et inférieure à 0,05°.
Les capteurs solaires analogiques sont les plus utilisés pour les CubeSats car ils sont fiables, passifs et peu coûteux. Leur faible précision, généralement de l'ordre de quelques degrés pour cette filière, est avant tout limitée par l'albédo terrestre. Sur de plus gros satellites, ils sont essentiellement utilisés pour les modes d'acquisition/survie. Ils se composent d'une ou plusieurs photo-diodes qui convertissent l'énergie reçue, fonction de l'inclinaison solaire, en courant électrique. Ce courant est proportionnel au cosinus de l'angle entre la normale au capteur et les rayons solaires. Ainsi, si et si , avec le vecteur unité pointant vers la normale extérieure à la photocellule et le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée.
Les capteurs solaires digitaux utilisent l'illumination de quelques pixels d'un capteur numérique CCD ou CMOS. L'ouverture est une fente étroite, et éventuellement la lumière solaire préalablement filtrée pour ne pas abîmer les capteurs trop sensibles. La position du ou des pixels éclairés permet de déterminer l'angle d'incidence du rayon de soleil. Le principe est généralisable à 2 axes. Ils sont généralement embarqués par des satellites n'ayant pas de capteur stellaire.
Capteur solaire digital
Capteur solaire analogique pyramidal développé par NTO pour la plateforme de satellites de télécommunication Spacebus-4000. Il fournit la position du Soleil selon 2 axes avec une précision meilleure que 0,1°.
Crédit :
ESA, NTO
Capteurs terrestres
Les capteurs terrestres sont utilisés pour déterminer l'orientation du satellite par rapport à la Terre. Plus précisément, c'est l'horizon de la Terre qui est utilisé, car la Terre elle-même peut couvrir jusqu'à 40% de l'espace environnant pour un satellite en orbite passe. Néanmoins, il est difficile de détecter précisément la limite de l'horizon à cause de l'atmosphère terrestre (jusqu'à 70 km), de la décroissance graduelle de l'énergie réémise par la Terre, des variations entre les régions illuminées ou à l'ombre, et enfin de la limite de précision des capteurs. Le principe de détection adopté est donc basé sur une variation thermique de l'élément sensible dans la bande spectrale infra-rouge où la Terre est vue comme un disque uniforme : la bande d'absorption du CO2 entre 14 et 16 μm. Ainsi, l'énergie émise par la Terre est plus homogène et l'horizon, précisément délimité, est visible de jour comme de nuit.
Ces capteurs peuvent être de deux types : les capteurs statiques, qui pointent dans une direction fixe, et les capteurs à balayage. Ils sont principalement utilisés sur des satellites en orbite basse et les satellites de télécommunication en orbite GEO ou MEO. Ils ont jusqu'à présent été assez peu utilisés sur CubeSats.
Capteurs magnétiques
Magnétomètres
Les magnétomètres convertissent un champ magnétique ambiant en tension électrique. Ils sont principalement constitués de bobines conductrices qui génèrent un courant ou une variation de courant lorsqu'elles sont placées dans un champ magnétique. Ils ne possèdent pas de partie mobile, n'ont pas besoin d'un champ de vue dégagé, consomment peu et sont faiblement encombrants. Ils peuvent néanmoins être contaminés par le champ magnétique local créé par des matériaux ferromagnétiques ou des boucles de courant dans les panneaux solaires. Ainsi, il faut compenser ces champs locaux s'ils sont connus, ou s'en affranchir en se plaçant à bonne distance (au bout d'un mât par exemple) dans le cas contraire. La technologie la plus utilisée, "flux gate", délivre directement la projection du champ magnétique selon l'axe de la bobine, contrairement aux magnétomètres à induction qui fournissent la dérivée temporelle de la projection du champ magnétique. Ces capteurs étant monoaxiaux, on associe généralement trois magnétomètres orientés orthogonalement afin de mesurer le vecteur champ magnétique instantané.
Les magnétomètres sont limités à des environnements possédant un champ magnétique suffisamment fort, et donc à l'orbite terrestre basse du fait de la décroissance en de son champ magnétique ( étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les magnétocoupleurs. Ils servent surtout à restituer l'attitude du satellite avec une précision de quelques degrés du fait des erreurs de modélisation du champ magnétique, des erreurs d'orbitographie et de celles propres au capteur. Dans ce cas, seule la connaissance de deux axes est disponible, l'orientation autour du champ magnétique n'étant pas observable. Enfin, on peut utiliser la dérivée du champ magnétique afin d'obtenir une mesure sur 2 axes de la vitesse angulaire du satellite.
Magnétomètre monoaxial "fluxgate"
Un magnétomètre "fluxgate" génère son propre champ magnétique. En inversant régulièrement la direction du courant, on inverse le champ magnétique, ce qui permet d'obtenir un champ magnétique moyen nul. Dans le cas où la magnétomètre se trouve dans un champ magnétique ambiant, la moyenne n'est plus nulle et il est alors possible de connaître ce champ extérieur.
Crédit :
Wikipedia
Capteurs inertiels
Les capteurs inertiels fournissent au satellite une mesure par rapport à une référence fixe dans l'espace. Les gyromètres délivrent l'attitude (vitesse angulaire) et les accéléromètres la position par rapport à cette référence. Pour les premiers, il y a détection du mouvement de rotation absolue, tandis que pour le second c'est le mouvement de translation accéléré qui est détecté. Nous ne nous intéresserons pas ici aux accéléromètres qui ne sont pas utiles à la détermination d'attitude.
Gyromètres
Les gyromètres mesurent donc les vitesses angulaires du satellite. On peut en déduire l'attitude de celui-ci en intégrant les vitesses calculées sur un temps donné. Ils sont très intéressants car ils permettent de fournir en permanence les mesures de vitesse de rotation sans se soucier du champ de vue et avec une très bonne précision à court terme. Ils fournissent également des informations à plus haute fréquence que les autres capteurs, ce qui est nécessaire pour certaines boucles de contrôle comme pour le contrôle du vecteur de poussée lors de phases de propulsion. On distingue plusieurs types de gyromètres : les gyromètres mécaniques, les gyromètres optiques et les gyromètres vibrants.
Gyromètres mécaniques
Les gyromètres mécaniques utilisent une toupie gyroscopique. Celle-ci possède une raideur gyroscopique du fait d'une vitesse de rotation élevée permettant de la maintenir selon une direction fixe. Tout couple s'exerçant celui-ci provoque l'écartement de cet axe par rapport à la direction initiale avec une vitesse faible du fait de la rigidité gyroscopique. Le principe consiste à estimer les mouvements du véhicule par rapport à la direction de référence que matérialise l'axe de rotation de la toupie.
Gyroscope
Exemple de gyroscope. Tant que le rotor (plateau central) sera en rotation, il gardera son axe de rotation fixe quelles que soient les orientations des cercles extérieurs.
Crédit :
Gary Quinsac
Gyromètres optiques
Les gyromètres optiques peuvent être des gyromètres laser ou à fibre optique. Dans les deux cas, ils présentent l'avantage de se dispenser de pièce mécanique en mouvement (pas d'usure), d'avoir de plus grande dynamique de mesure et bande passante, une insensibilité à l'accélération et moins de contraintes concernant la stabilité en température. Les gyromètres laser fonctionnent suivant le principe du laser à cavité résonnante. Les gyromètres à fibre optique reprennent l'effet Sagnac. Deux ondes parcourant un chemin fermé en rotation (par rapport à un référentiel inertiel) subissent un décalage temporel lorsqu'elles ont été émises et reçues par un émetteur/récepteur fixe par rapport au chemin optique. Le décalage temporel entre les deux rayons lumineux est ainsi proportionnel à la vitesse de rotation du système.
Gyromètre optique
La lumière émise par la source se propage dans la bobine de fibre optique dans deux directions opposées suite à une première traversée de la lame séparatrice (un quart de l'énergie émise initialement arrivera sur le détecteur selon chacune des directions de parcours). Du fait de la rotation de la plateforme, les signaux lumineux parcourant la bobine de fibre dans des directions opposées arriveront au récepteur dans des temps différents. C'est l'effet Sagnac.
Crédit :
Gary Quinsac
Gyromètres vibrants
Les gyromètres vibrants quant à eux sont assez proches des gyromètres mécaniques, à la différence près qu'aucune pièce n'est ici en mouvement. Ils détectent le déplacement d'une onde vibratoire dans une structure, dû à la force de Coriolis.
Accéléromètres
Les accéléromètres sont principalement utilisés pour la navigation et le guidage des véhicules de rentrée atmosphérique ou dans l'identification de microvibrations. Une modification de leur tension de sortie est traduite en accélération. Le principe de base consiste à disposer d'une masse dans un boîtier fixée par des ressorts. Lorsque le boîtier est accéléré, la masse a tendance à rester fixe par inertie : elle est donc en mouvement par rapport au boîtier. Les ressorts ont alors pour effet de contrer le déplacement de la masse par rapport au boîtier, et ce déplacement devient alors proportionnel à l'accélération de ce dernier. Les accéléromètres sont capables de mesurer la résultante des forces de surface mais pas les accélérations d'origine gravitationnelle puisque la masse et son boîtier sont soumis au même champ gravitationnel.
Accéléromètre
Le déplacement de la masse par rapport à la boîte dans lequelle elle se trouve dépend de l'accélération de la boîte. , avec l'accélération, la masse, la constante de raideur du ressort et le déplacement du ressort.
Crédit :
Gary Quinsac
Actionneurs
Auteur: Gary Quinsac
Actionneurs inertiels
Parmi les actionneurs inertiels, on distingue les roues d'inertie et les actionneurs gyroscopiques.
Roues à inertie
Les roues à inertie sont les actionneurs les plus utilisés pour le contrôle d'attitude des satellites. Elles permettent le stockage et la restitution du moment cinétique. Elles sont composées d'une masse en rotation autour d'un axe fixe ou volant d'inertie. Le couple créé par une roue à inertie est égal au changement du moment cinétique durant un temps donné (voir la page sur la dynamique d'attitude). Un couple est ainsi créé lorsque le moment cinétique de la roue à inertie est modifié, c'est-à-dire que sa vitesse de rotation change. Cette accélération ou décélération angulaire permet d'emmagasiner ou de libérer du moment cinétique. Ce type d'actionneur peut saturer, c'est-à-dire atteindre une limite supérieure ou inférieure en vitesse angulaire. Dans ce cas il lui devient impossible de fournir un couple selon cet axe (toute évolution possible est une décélération de la roue entraînant un couple dans le sens contraire à celui souhaité). Il faut alors utiliser un autre actionneur à bord pour ramener la vitesse dans une plage admissible tant pour le fonctionnement propre de la roue que pour les performances du contrôle d'attitude. Ces actions de réduction de la vitesse absolue du volant d'inertie, appelées "désaturation", se font lors de l'application d'un couple antagoniste, généralement à l'aide de magnéto-coupleurs ou de propulseurs.
Roues à inertie
Deux des quatre roues à inertie du télescope Kepler durant l'assemblage. Elles sont inclinées différemment afin de permettre un contrôle de l'attitude selon plusieurs axes. L'une de ces roues a été victime d'un problème que l'on rencontre parfois avec ce type d'actuateurs, c'est à dire une friction trop importante. Pour parer à la perte d'une roue à inertie, on se permet généralement des configurations redondantes sur les gros satellites.
Crédit :
Ball Aerospace photo
Actionneurs gyroscopiques
Les roues à inertie sont limitées en termes de capacité de couple. C'est la raison pour laquelle les satellites nécessitant de rapides manœuvres ou possédant des fortes inerties (comme les stations orbitales) utilisent plutôt des actionneurs gyroscopiques, ou gyrocoupleurs. Contrairement aux roues à inertie, le principe n'est plus de produire un couple en faisant varier la vitesse de rotation de la roue, mais en modifiant l'axe de rotation d'une roue tournant à une vitesse constante. Une variation du moment cinétique est ainsi créée, se traduisant par un couple perpendiculaire au moment cinétique de la roue et au vecteur vitesse de rotation qui lui est appliqué (suivant le principe du couple gyroscopique). Les actionneurs gyroscopiques consomment moins d'énergie et possèdent une plus grande capacité de couple pour des masses et des tailles comparables. Néanmoins, leur utilisation est limitée par l'importance des couples appliqués aux articulations (risques de panne mécanique) et aux précisions requises dans les mesures de position et de vitesse angulaire.
Actionneur gyroscopique
Fonctionnement d'un actionneur gyroscopique.
Crédit :
Gary Quinsac
Actionneurs magnétiques
Magnéto-coupleurs
Un magnéto-coupleur est une bobine qui, parcourue par un courant, génère un moment dipolaire (en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre , le magnéto-coupleur fournit alors un couple . On distingue trois types de magnéto-coupleurs :
Le moment dipolaire des magnéto-coupleurs les plus simples s'exprime en fonction de nombre de spires , de l'aire de la section de la bobine et du courant d'intensité la parcourant. Ce moment dipolaire s'exprime alors et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale.
On utilise également des "torque rods", c'est-à-dire une bobine entourant cette fois un barreau ferromagnétique, afin d'obtenir de plus importants moments dipolaires pour un courant donné.
Enfin, on réalise également des magnéto-coupleurs "embarqués", c'est-à-dire qu'ils sont directement obtenus sur le PCB où la bobine vient prendre la place des traves de cuivre de la plaque. La bobine prend alors la forme d'une spirale carrée.
La principale limitation de cet actionneur est que le couple généré est toujours orthogonal au champ magnétique, limitant à seulement deux angles d'attitude le contrôle du satellite en un point donné de son orbite. À l'instar des magnétomètres, leur utilisation est limitée aux orbites terrestres basses. Ils peuvent être utilisés soit pour effectuer du contrôle d'attitude soit pour "désaturer" des actionneurs inertiels. La plupart des applications des magnéto-coupleurs utilisent trois appareils produisant des couples sur trois axes orthogonaux. Il n'est pas toujours nécessaire d'employer plus de magnéto-coupleurs pour la redondance puisqu'ils ont habituellement un "double enroulement" fournissant une redondance interne.
Magnéto-coupleurs
"SatBus MTQ" est un système composé de trois magnéto-coupleurs orthogonaux respectant le standard CubeSat. Les bobines 1 et 2 bénéficient d'un barreau ferromagnétique, contrairement à la bobine 3.
Crédit :
Nano Avionics
Propulsion
Auteur: Gary Quinsac
Introduction à la propulsion
Spécificités de la propulsion
Parmi les fonctions couvertes par le SCAO il y a la réalisation des manœuvres de modification de la vitesse ainsi que le contrôle d'attitude associé (assurer le pointage des propulseurs lors de la poussée). Le ΔV nécessaire au contrôle d'orbite ne peut être fourni que par des propulseurs, néanmoins ceux-ci peuvent également être utilisés pour générer des couples. Contrairement aux magnéto-coupleurs, ce sont des actionneurs utilisables sur n'importe quelle orbite car ils n'ont pas besoin d'un environnement particulier pour fonctionner. Leur principal inconvénient est une durée de vie limitée inhérente à l'utilisation d'un carburant, lui-même en quantité finie.
Fonctions de la propulsion satellitaire
Il faut différencier la propulsion des lanceurs de celle des satellites. La première doit permettre des incréments de vitesse de l'ordre de 7 à 100 km/s et de très importants niveaux de poussée. Elle se caractérise par une faible capacité d'emport et se présente sous la forme de puissants propulseurs chimiques. La seconde, qui nous intéresse ici, sert à effectuer des transferts orbitaux et des voyages interplanétaires, du contrôle d'orbite et du contrôle d'attitude. Le sous-système propulsif d'un satellite remplit ainsi certaines fonctions :
le transfert du véhicule de l'orbite d'injection lanceur à son orbite définitive,
le maintien à poste (contrôle d'orbite),
le contrôle d'attitude,
la désorbitation du véhicule en fin de vie opérationnelle,
le transfert interplanétaire et la mise en orbite autour d'un corps (planète, astéroïde, comète...) dans le cas d'une sonde interplanétaire.
Orientation du vecteur de poussée
Pour cela, il doit délivrer des forces et des couples. Les forces, ou poussées, sont obtenues par l'éjection de matière à grande vitesse et varient entre quelques μnewtons et quelques centaines de newtons. Suivant les axes de poussée, deux cas de figure sont possibles :
si l'axe de poussée est parfaitement aligné avec le centre de masse alors on modifie uniquement la vitesse du véhicule,
si l'axe de poussée n'est pas aligné avec le centre de masse, il y a à la fois une modification de la vitesse du véhicule (égale au cas où la force serait apliquée au centre de masse) et de sa vitesse de rotation (apparition d'un couple proportionnel à l'écart entre l'axe et le centre de masse).
Moteur principal de la navette américaine
Test d'allumage du moteur principal de la navette spatiale.
Crédit :
NASA
Système de propulsion de BepiColombo
Vue d'artiste du système de propulsion ionique qui sera utilisé pour la mission BepiColombo. Cette mission d'exploration de la planète Mercure doit être lancée en octobre 2018 et est développée conjointement par l'ESA et la JAXA.
Crédit :
ESA
Fondamentaux de la propulsion
Conversion d'énergie
Tous les types de systèmes de propulsion sont basés sur un processus de conversion d'énergie. Du carburant est libéré à grande vitesse (vitesse d'expulsion notée qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée , ce qui, par conservation de la quantité de mouvement, résulte en une quantité de mouvement opposée pour le véhicule. En partant de la troisième loi de Newton et en considérant que la vitesse d'expulsion est constante, on obtient : .
Incrément de vitesse
Ecrivons que la variation de la quantité de mouvement du satellite est opposée à la variation de la quantité de mouvement du carburant expulsé :
On peut directement en déduire la capacité d'incrément de vitesse total () du satellite :
On en déduit l'équation de Tsiolkovski :
Manœuvres orbitales
Voici quelques exemples d'incréments de vitesse associés à des lancements et à des manœuvres orbitales issus de "Spacecraft propulsion - A brief introduction" par Peter Erichsen :
Incréments de vitesses associés à des manœuvres spatiales et de décollage
Manœuvre
ΔV typique [m/s]
Kourou → LEO (équatorial)
9300
Kourou → GTO
11443
Cap Canaveral → LEO (équatorial)
9500
Cap Canaveral → GEO
13600
LEO → GEO (changement d'inclinaison de 28°)
4260
GTO → GEO (changement d'inclinaison de 9°)
1500
GTO → GEO (changement d'inclinaison de 28°)
1800
Maintien à poste Nord/Sud
50 / an
Maintien à poste Est/Ouest
5 / an
LEO → Orbite de libération terrestre
3200
LEO → Orbite lunaire
3900
LEO → Orbite martienne
5700
Quantité de carburant
Si l'on veut déterminer la quantité de carburant nécessaire à la réalisation d'un manœuvre spatiale , il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir :
Impulsions
Nous pouvons maintenant définir de nouveaux termes. L'impulsion minimum (ou "impulse bit" en anglais, Ibit) est la plus petite modification de la quantité de mouvement permise par le système de propulsion. C'est un paramètre important lorsque l'on veut effectuer du contrôle fin de l'attitude et de l'orbite.
L'impulsion totale (Itot) quant à elle représente la capacité de modification de la quantité de mouvement pour une quantité donnée de carburant : .
Il est essentiel de définir des paramètres permettant de comparer la performance des différents systèmes propulsifs. Le plus utilisé, l'impulsion spécifique (Isp), peut être obtenue expérimentalement. Elle se définit comme l'impulsion délivrée par unité de poids de carburant : , avec le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
Dans le but de déterminer la performance du système propulsif dans son ensemble, en incluant la masse de l'ensemble (l'électronique, le carburant et réservoir, l'alimentation) mps, on introduit l'impulsion spécifique du système, notée Issp : .
Action-réaction
Illustration du principe d'action-réaction. Le carburant éjecté propulse le véhicule dans la direction opposée.
Systèmes de propulsion
Auteur: Gary Quinsac
Systèmes de propulsion
Le sous-système de propulsion est en interaction proche avec les sous-systèmes mécanique et thermique, notamment pour l'implantation des réservoirs et le contrôle thermique de la propulsion. Il doit également respecter les exigences du contrôle d'attitude et d'orbite (SCAO). Si son principe de fonctionnement est basique (une énergie emmagasinée est libérée afin de transmettre une énergie cinétique à un véhicule) il existe différents types de propulsion, eux-mêmes divisés en sous-groupes :
la propulsion chimique dans laquelle un gaz à haute est libéré avec une importante quantité de mouvement,
la propulsion électrique qui utilise une énergie électrique ou électromagnétique afin d'augmenter la quantité de mouvement du carburant expulsé,
la propulsion "sans-carburant" qui, comme son nom l'indique, ne nécessite pas de carburant. Elle ne sera pas détaillée dans ce cours (ex : voile solaire).
Dans le but de répondre aux exigences du SCAO, les systèmes de propulsion sont en particulier caractérisés par :
une faible poussée avec de faibles niveaux d'accélération,
des modes d'opération continus pour le contrôle d'orbite,
des modes d'opération pulsés pour le contrôle d'attitude,
des performances prédictibles, précises et répétables,
leur stockage (fiabilité...),
l'impact des particules émises.
Certains de ces critères sont repris dans le tableau suivant pour les différents types de propulsion introduits dans ce cours.
Comparaison des différents types de propulsion
Type de propulsion
Fiabilité
Coût
Isp
Poussée
Puissance électrique
Gaz froids
Gaz
Très bonne
Très bas
Très basse
Faible
Très faible
Liquide
Bonne
Très bas
Très basse
Faible
Très faible
Gaz chauds
Solide
Bonne
Bas
Moyenne
Très forte
Très faible
Mono-carburant
Bonne
Bas
Basse
Faible
Très faible
Bi-carburant
Moyenne
Haute
Moyenne
Très faible
Électrique
Électrothermique
Moyenne
Haute
Très faible
Forte
Électromagnétique
Faible
Très haute
Extrêmement faible
Forte
Électrostatique
Faible
Extrêmement haute
Très faible
Très forte
Une comparaison de la force de poussée et de l'impulsion spécifique de systèmes de propulsion adaptés aux nano.micro-satellites est proposée dans cette figure.
Classification des sous-systèmes de propulsion
Les principaux systèmes de propulsion sont ici classés par catégorie. Les couleurs indiquées sur cette figure correspondent au couleurs présentes dans la figure suivante.
Crédit :
Gary Quinsac
Performances de systèmes de propulsion pour CubeSat
Impulsion spécifique et force de poussée de systèmes de propulsion pour CubeSat (en développement pour la plupart en 2018). Des couleurs permettent de différencier les différents types de propulsion.
Crédit :
Gary Quinsac
Propulsion chimique
La propulsion chimique utilise des gaz à haute température et/ou pression, accélérés à travers une tuyère. Les systèmes de propulsion chimique sont généralement associés à des impulsions spécifiques plus faibles que les propulsions électriques, mais de plus grandes poussées. On peut les diviser en deux catégories : les systèmes à gaz froid et à gaz chaud.
Systèmes de propulsion à gaz froid
Ces systèmes utilisent des gaz stockés sous haute pression ou sous forme liquide. Les gaz sont détendus dans une tuyère convergente-divergente pour obtenir la force de poussée. Ce sont les systèmes les plus simples à mettre en œuvre, mais cela s'accompagne d'une faible force de poussée et d'un faible rendement (impulsion spécifique). Ils présentent une bonne aptitude au fonctionnement en mode pulsé, du fait du faible temps de réponse, les rendant attrayant pour assurer le contrôle d'attitude. Ils ont également l'avantage de limiter les contaminations de l'environnement, ce qui est intéressant notamment pour les optiques des missions scientifiques.
La simplicité de ces systèmes les rend intéressants pour les CubeSats. Néanmoins, du fait de la nécessité de pressuriser le carburant, ils ne respectent pas le cahier des charges décrit par le CDS ("CubeSat Design Specification").
Systèmes de propulsion à gaz chauds
Pour les missions requérant des niveaux de poussée et d'impulsion supérieurs, les gaz froids ne sont plus adaptés et il est nécessaire d'utiliser des carburants plus énergétiques générant des gaz chauds. Les systèmes à gaz chaud sont le type le plus commun de propulsion spatiale. Les ergols des systèmes à gaz chaud sont stockés à l'état liquide ou solide. Une réaction de combustion exothermique de l'ergol est nécessaire pour obtenir des produits à haute température qui sont ensuite expulsés dans la tuyère. Ils nécessitent donc généralement une étape de plus que les gaz froids. On les classe en deux catégories en fonction de leur ergol :
liquide, comprenant mono-ergol et bi-liquide,
solide, mais cela concerne les fusées et non les satellites car ils ne sont pas rallumables.
Mono-ergols
Le mono-ergol le plus utilisé est l'hydrazine. Il se décompose dans le propulseur par catalyse. Les gaz chauds résultant sont explulsés par la tuyère. Il présente l'avantage d'être fiable tout en conservant de bonnes performances, mais sa haute toxicité a poussé les chercheurs à s'orienter vers des aternatives appelée "mono-ergols verts". Ces ergols sont des sels dérivés de l'acide nitrique, tels que le dinitramide d'amonium.
Bi-liquides
Dans les systèmes à bi-liquides, deux ergols, un comburant et un carburant, produisent une force de poussée par combustion. Ils sont introduits séparément dans la chambre de combustion où ils s'inflamment spontanément par contact et génèrent des gaz chauds, une nouvelle fois détendus dans la tuyère. Ces systèmes sont plus complexes et plus chers que les systèmes présentés précédemment, mais ils sont également plus efficaces (meilleure Isp) et plus puissants (meilleure poussée).
Schéma des systèmes de propulsion chimiques
Crédit :
Gary Quinsac
Propulsion électrique
La propulsion électrique contourne la limitation fondamentale de la propulsion chimique, c'est-à-dire que l'énergie du carburant expulsé ne dépend que de son énergie chimique et du débit. Une énergie électrique ou électromagnétique est utilisée afin d'éjecter de la matière à des vitesses beaucoup plus élevées. En d'autres termes, on utilise la puissance électrique issue du sous-système électrique (panneaux solaires, batteries...) pour accélérer le carburant et produire une force de poussée. Ces vitesses d'éjection plus importantes se traduisent immédiatement par une plus grande efficacité (moins de carburant est nécessaire pour obtenir un même incrément de vitesse). Néanmoins, les forces de poussée produites sont nettement plus faibles que dans le cas de la propulsion chimique. Par conséquent, la propulsion électrique est préférée lorsque le ΔV à réaliser est important ou lorsque il est nécessaire des manœuvres avec des poussées très faibles (contrôle d'attitude très précis, etc.).
La propulsion électrique offre une grande gamme de performances en fonction du type de sous-système utilisé. On les classe ainsi en trois catégories : les systèmes électrothermaux, électromagnétiques et électrostatiques.
Systèmes de propulsion électrothermaux
Historiquement, ces systèmes sont une amélioration par rapport aux systèmes de propulsion chimiques. Le gaz est chauffé en passant le long d'une surface chauffée électriquement ou à travers un arc électrique afin de lui conférer plus d'énergie. Le gaz ainsi chauffé bénéficie d'une détente plus efficace.
Systèmes de propulsion électromagnétiques
La propulsion électromagnétique utilise la conversion d'un gaz en plasma. Le plasma est constitué d'électrons (de charge électrique négative), d'ions (pour la plupart de charge électrique positive) et d'atomes ou molécules neutres (non chargés électriquement). Les ions positifs résultants sont alors accélérés à de très grandes vitesses par l'énergie électrique grâce à la force de Laplace , où et sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
Contrairement aux systèmes électrostatiques qui vont être présentés par la suite, les systèmes électromagnétiques expulsent un plasma globalement neutre, ce qui est intéressant pour éviter de charger électriquement le reste du satellite. Cette famille de propulseurs contient notamment les PPT (Pulsed Plasma Thrusters), les VAT (Vacuum Arc Thrusters) ou encore les MPDT (Magneto Plasma Dynamic Thrusters).
Systèmes de propulsion électrostatiques
À la manière de l'accélération électromagnétique, l'énergie électrique est dans un premier temps utilisée pour transformer le fluide propulsif en plasma. La différence se situe au niveau de l'accélération des ions qui n'est plus obtenue par les forces de Laplace mais par l'application d'un champ électrostatique créant une force de Coulomb (). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
Parmi les propulseurs électrostatiques, on peut citer les propulseurs ioniques, les propulseurs à effet Hall et propulseurs FEEP (Field Emission Electric Propulsion).
Schéma des systèmes de propulsion électriques
Crédit :
Gary Quinsac
Filtrage et lois de commande
Auteur: Gary Quinsac
Introduction
Le filtrage et les lois de commande sont présentés car ce spaont des aspects essentiels d'un SCAO. Néanmoins, ce cours a simplement pour ambition de vous en faire une brève introduction.
En mathématiques et en ingénierie, la théorie du contrôle a comme objet l’étude du comportement de systèmes dynamiques. En électronique et traitement du signal, un filtre est originellement un circuit qui rejette une partie indésirable d'un signal. On appelle également filtre un outil logiciel dont le but est la séparation des fréquences contenues dans un signal numérisé.
Estimation d'attitude
Auteur: Gary Quinsac
Principe
L'estimation d'attitude consiste à estimer l'état actuel de l'orientation d'un satellite à partir d'un jeu d'observations et de références obtenues à partir de modèles. Ces observations ont été préalablement effectuées par des capteurs fixés sur le satellite. L'objectif est ici de trouver la meilleure estimation de l'état réel du système sous forme de matrice de changement de repère ou de quaternion d'attitude. La résolution exacte du problème n'est généralement pas possible car les observations sont entachées d'erreurs (erreurs de mesure, d'orientation du capteur, de modélisation...). De plus, on dispose souvent d'une surabondance d'information puisque plusieurs capteurs fournissent des informations par rapport à des références différentes (Soleil, champ magnétique, étoile...). On cherche alors à exploiter de manière optimale ces sources d'information en leur associant des modèles d'erreur.
Les problèmes de détermination d'attitude font intervenir des observations (orientation d'objets) pris à certaines dates. La détermination d'attitude statique représente le cas le plus simple, dans lequel on considère que toutes les mesures sont effectuées au même instant. Au contraire, lorsque le temps est introduit, on parle de détermination d'attitude récursive.
La qualité de la connaissance d'attitude dépend des limitations des capteurs, de la quantification des données, du temps d'échantillonnage et du traitement numérique. La détermination d'attitude embarquée est limitée par les capacités de filtrage de l'ordinateur de bord. Il arrive que pour obtenir une meilleure connaissance de l'attitude a posteriori les données des capteurs soient transmises au segment sol où elles sont post-traitées puis exploitables (par le segment sol ou le satellite).
Boucle SCA
Boucle de contrôle d'attitude.
Crédit :
Gary Quinsac
Cas statique
Le cas particulier de l'estimation d'attitude à partir de mesures simultanées de directions non parallèles est ici introduit. À chaque observation sont associés deux vecteurs. Le premier est un vecteur unitaire définissant la direction mesurée (observée) de la source (la Terre, le Soleil, une étoile, le champ magnétique terrestre...), exprimée dans le repère lié au satellite. Le second est un vecteur unitaire qui définit la direction de référence de la source, exprimée dans le repère origine (généralement inertiel). L'estimation d'attitude consiste ici à déterminer la matrice de transformation orthogonale satisfaisant pour chaque observation i :
Méthode TRIAD
La méthode TRIAD se base sur l'observation de deux directions non-parallèles. Il s'agit de déterminer la MCD permettant de transformer les vecteurs de référence et en vecteurs d'observation et . Puisque l'on cherche à obtenir l'attitude suivant 3 axes, il nous faut créer deux bases orthonormées (y1, y2, y3) et (x1, x2, x3), respectivement associées aux vecteurs d'oservation et de référence. Il ne reste plus qu'à déduire la matrice de transformation orthogonale (ou MCD) satisfaisant :
, ,
Cette méthode présente l'avantage d'être extrêmement simple, d'où son utilisation dans de nombreuses missions passées. De nos jours, cette méthode n'est plus considérée comme suffisamment précise. En effet, les mesures d'observation sont entachées d'erreur, ce qui empêche d'obtenir le même résultat suivant le vecteur d'observation choisi au départ. C'est pour cette raison que l'on choisit généralement l'observation la plus précise. Des techniques de calcul de la covarience de l'erreur de l'estimation ont été développées pour parer à ces inconvénients.
Méthode QUEST
Un critère quadratique peut être utilisé pour déterminer la matrice d'attitude. Cela revient à chercher la matrice orthogonale minimisant la fonction de moindres carrés :
La minimisation de ce critère n'a rien d'évident et de nombreuses méthodes ont été proposées. Il s'agit d'identifier les 9 paramètres de la MCD respectant les différentes contraintes énoncées précédemment (moindres carrés et règles de la MCD). L'algorithme QUEST (QUaternion ESTimation) offre une alternative intéressante. La forme quadratique est alors utilisée à la place de la MCD, permettant de réduire le nombre de paramètres. Nous ne rentrerons pas dans le détail de cette méthode dans le cadre de ce cours.
Cas général
Dans le cas général où nous ne disposons pas de plusieurs mesures de directions non parallèles effectuées au même instant, le problème d'estimation devient dépendant du temps. Bien que des méthodes récursives basées sur l'algorithme QUEST aient été développées et utilisées, le filtrage de Kalman est le moyen le plus utilisé pour estimer l'attitude d'un satellite en présence de bruits de mesure.
Filtre de Kalman
Le filtre de Kalman a été développé en 1960 comme une nouvelle approche pour le filtrage linéaire et les problèmes de prédiction. Il permet de maintenir une estimation de l'état d'un système dynamique en dehors des périodes d'observation, à partir d'un modèle de son erreur. Puisqu'il s'agit d'un filtre récursif, la quantité d'informations à traiter reste limitée, ce qui en fait un filtre très apprécié à bord des satellites. On a pour habitude de distinguer deux phases dans ce type de filtres, la prédiction et la mise à jour :
la phase de prédiction intervient lorsqu'aucune observation n'est disponible ; le filtre se base sur le modèle dynamique embarqué pour mettre à jour les paramètres estimés, tout en mettant à jour la matrice de covariance de l'erreur d'estimation ; cette dernière augmente durant cette phase en raison de l'incertitude inhérente au modèle dynamique,
la mise à jour intervient lorsqu'une observation est disponible ; il devient alors possible de comparer la prédiction à l'observation ; les prédictions sont ainsi mises à jour, en tenant compte des incertitudes liées à l'observation et à la prédiction. Si les incertitudes liées aux observations sont plus faibles que celle du modèle alors cette phase fait décroître la covariance.
Filtre de Kalman discret
C'est la version la plus simple du filtre de Kalman, seules l'estimation de l'état précédent et les mesures actuelles sont nécessaires.
Processus à estimer
Ici, le processus stochastique à estimer est gouverné par une équation différentielle linéaire :
La mesure devant permettre l'estimation s'écrit :
et représentent respectivement les bruits de processus et de mesure. On les suppose indépendants, blancs et de distribution de probabilité normale. est la matrice qui relie l'état précédent k-1 à l'état actuel k, est la matrice qui relie l'entrée de commande à l'état . est la matrice reliant l'état à sa mesure .
Phase de prédiction
Durant la phase de prédiction, l'état et l'estimation de la covariance sont projetés dans le temps de l'état k-1 à l'état k :
est la matrice de covariance du bruit de processus , est la matrice d'estimation a priori de la covariance de l'erreur.
Phase de mise à jour
Trois étapes se succèdent dans la phase de mise à jour. Il faut d'abord calculer le gain de Kalman , puis générer une estimation de l'état a posteriori en incorporant la mesure. Enfin, on obtient la matrice de covariance de l'erreur d'estimation a posteriori .
est la matrice identité. Deux équations supplémentaires permettent d'obtenir l'innovation, ou résiduel, , et la covariance de l'innovation :
À chaque étape le processus est répété afin d'obtenir de nouvelles estimations a posteriori à partir des estimations a priori. En pratique, la matrice de covariance du bruit de mesure est déterminée avant d'utiliser le filtre et peut être mise à jour par la suite. Il est plus compliqué de déterminer la matrice de covariance du bruit de processus car nous ne pouvons généralement pas directement observer le processus à estimer. Afin d'améliorer les performances du filtre, il est habituel de régler ces deux paramètres.
La plupart des systèmes physiques, et notamment ceux étudiés, sont non linéaires. Le filtre de Kalman classique n'est donc optimal que sur une faible portion des phénomènes pris en compte. Dans le cas de systèmes non-linéaires, nous utilisons donc un filtre de Kalman étendu, ou "Extended Kalman Filter".
Lois de contrôle
Auteur: Gary Quinsac
Introduction à la théorie du contrôle
La théorie du contrôle s'intéresse au comportement de systèmes dynamiques en fonction de leurs paramètres. Elle peut être vue comme une stratégie permettant de sélectionner la bonne entrée d'un système pour que le sortie soit celle désirée. Cela fait partie du domaine de l'automatique.
Boucles ouvertes et fermées
Un système de contrôle est un mécanisme altérant l'état futur d'un système. En l'absence de retour d'information concernant la sortie du système, on se trouve dans le cas d'une boucle ouverte. Prenons l'exemple d'un lave-vaisselle. Celui-ci est programmé pour tourner un certain temps, à une certaine température et avec une certaine quantité d'eau. Ces paramètres ne dépendent pas de l'état de la vaisselle qu'il contient.
Une boucle de rétroaction peut être ajoutée afin de modifier intelligemment la durée du cycle. On obtient alors ce que l'on appelle une boucle fermée, puisqu'une information sur l'état de sortie de notre système, obtenue à l'aide de capteurs, va être comparée à un signal de référence afin de nourir un contrôleur qui a la charge de choisir la bonne entrée. On peut ici parler d'asservissement.
Les boucles de contrôle d'attitude ont pour but d'assurer un contrôle stable de l'orientation du satellite, en prenant en compte les contraintes opérationnelles (temps de réponse aux commandes par exemple) et les perturbations externes et internes. On met en place un asservissement dans le but d'atteindre une valeur de consigne et de la maintenir. Pour ce faire, l'asservissement, ou correcteur, mesure en permanence l'écart entre la valeur réelle de la grandeur à asservir et la valeur de consigne. Il en déduit la commande appropriée que les actionneurs devront ensuite appliquer afin de réduire cet écart.
Systèmes linéaires
Un système linéaire est un objet qui peut être décrit par des équations linéaires. De tels systèmes sont essentiels car nous pouvons les résoudre. Pourtant, presque aucun système réel n'est un système linéaire. L'objectif est donc de simplifier l'objet étudié (actionneur, capteur, système dynamique...) afin de pouvoir l'approximer par un système linéaire. On parle alors de son domaine linéarité.
La réponse d'un système linéaire peut être obtenue en sommant ses réponses impulsionnelles. Cette sommation dans le domaine temporel est appelée convolution. Soit un signal d'entrée u(t) et une réponse impulsionnelle g(t), la sortie y(t) s'exprime :
Fonction de transfert
Afin de simplifier cette opération, on introduit la fonction de transfert. Une fonction de transfert est la transformée de Laplace de la réponse impulsionnelle d'un système linéaire lorsque ses conditions initiales (ou aux limites) sont nulles. Elle permet de transformer le produit de convolution en simple produit :
Transformée de Laplace
Soit une fonction du temps. Sa transformée de Laplace unilatérale est
définie par où est la variable complexe.
Transformées de Laplace usuelles
f(t)
F(p)
(Dirac)
Soit l'équation où et sont respectivement l'entrée et la sortie et et sont des polynômes à coefficients réels en (d/dt). Si l'on considère que les conditions initiales sont nulles, on peut réécrire l'équation différentielle précédente pour obtenir la fonction de transfert H :
Les pôles d'une fonction de transfert sont les valeurs pour lesquelles le dénominateur D, aussi appelé équation caractéristique, s'annule. Attention, tout ceci est vrai à condition que la fonction de transfert soit sous forme irréductible. Pour que le système soit stable, il faut que tous les pôles soient strictement à l'intérieur du cercle unité ().
Représentation de la boucle de contrôle d'attitude
On représente la boucle du SCA comme un contrôle en boucle fermée, avec le terme de rétroaction. On note R(p) le signal de référence, Y(p) le signal de sortie, D(p) la perturbation, U(p) le signal de contrôle, Gc(p) le contrôleur, E(p) l'erreur, Gp(p) le matériel à contrôler et C(p) la dynamique des capteurs. Si l'on considère que les perturbations sont nulles, la fonction de transfert s'écrit :
Le dénominateur de cette équation est un polynome dont les racines déterminent le type de réponse. Le contrôleur peut être utilisé pour stabiliser le système ou lui donner des caractéristiques particulières.
Boucle ouverte ou fermée
Dans la boucle ouverte, la durée du cycle de lavage ne dépend pas de la propreté de la vaisselle qu'il contient. Afin d'adapter cette durée à l'état des assiettes et verres, il faut qu'un capteur de propreté fournisse une information à comparer à la propretée désirée et qu'un contrôleur en déduise une nouvelle durée. C'est ce que l'on appelle une boucle fermée.
Crédit :
Gary Quinsac
Fonction de transfert
Crédit :
Gary Quinsac
Diagramme en bloc de la boucle de contrôle
Chaque élément de la boucle de contrôle d'attitude est représenté par sa fonction de transfert.
Crédit :
"Fundamentals of Spacecraft Attitude Determination and Control", F. Landis Markley et John L. Crassidis.
Contrôleur
Le contrôleur a pour objectif de convertir l'erreur, c'est-à-dire l'écart entre la mesure de la sortie de la boucle et le signal de référence, en un signal de contrôle qui va finir par ramener l'erreur à 0.
Les performances du contrôleur et a fortiori de l'asservissement sont décrites par plusieurs paramètres :
la rapidité, qui définit la vitesse à laquelle une valeur de sortie stable est atteinte; la rapidité est caractérisée par le temps de réponse du système ;
la stabilité, qui définit la capacité de l'asservissement à produire une sortie tendant vers une valeur finie pour une entrée constante (pas d'oscillation ou de divergence) ;
le dépassement de la consigne, qui correspond au dépassement par la sortie de la valeur de consigne avant de se stabiliser ;
la précision, c'est-à-dire la capacité de l'asservissement à atteindre la consigne avec précision le plus rapidement possible.
L'asservissement doit ainsi assurer un compromis entre performance et stabilité. La performance est proportionnelle à la valeur du gain du correcteur, mais à partir d'une certaine valeur celui-ci a tendance à déstabiliser le système.
Contrôleur PID
Le contrôleur "Proportionnel-Intégral-Dérivé" est la logique de contrôle la plus utilisée pour les régulateurs avec boucle de rétroaction. Ce contrôleur agit de trois manières :
action proportionnelle : l'erreur est multipliée par un gain
action intégrale : l'erreur est intégrée et divisée par un gain
action dérivée : l'erreur est dérivée et multipliée par un gain
La fonction de transfert d'un régulateur PID s'exprime :
Considérons un système de contrôle d'attitude mono-axe simple. L'équation d'Euler s'exprime :
où est la matrice d'inertie, est l'angle, est le couple de contrôle et est le couple perturbateur extérieur.
Contrôleur PD
Un simple contrôle proportionnel ne pourrait pas atteindre une réponse asymptotiquement stable, nous introduisons donc un régulateur PD (proportionnel-dérivé) :
où et sont des gains qu'il faut déterminer. Le système en boucle fermée et son équation caractéristique s'écrivent alors :
Dans le but d'identifier les valeurs des deux gains, nous introduisons et , respectivement la fréquence propre (fréquence de la réponse sinusoïdale du système non amorti) et le facteur d'amortissement. L'équation caractéristique est réécrite en introduisant ces deux nouvelles grandeurs :
Les gains du contrôleur s'expriment alors : et . On choisit généralement le facteur d'amortissement de tel sorte que . Il est important de noter que l'information sur la dérivée provient de gyroscopes ou de différences finies de l'attitude.
Contrôleur PID
Pour une perturbation constante de valeur unitaire, le système asservi par le contrôleur PD produit une attitude en régime permanent non-nulle : . Idéalement nous souhaitons que l'attitude en régime permanent soit nulle, c'est la raison pour laquelle nous introduisons le contrôleur PID (proportionnel-intégral-dérivé) :
L'équation caractéristique s'écrit cette fois :
où et sont toujours la fréquence propre et le facteur d'amortissement, et est la constante temporelle associée au contrôle intégral. Les gains du contrôleur PID s'expriment : , et . On choisit souvent la constante telle que : .
Facteur d'amortissement
Réponse pour différents facteurs d'amortissement.
Crédit :
"Fundamentals of Spacecraft Attitude Determination and Control", F. Landis Markley et John L. Crassidis.
Se tester
Auteur: Gary Quinsac
Présentation des exercices
Cette section doit vous permettre de vous exercer sur certaines des notions présentées dans ce cours. Un QCM reprend la première partie du cours, soit la découverte d'une mission spatiale, du standard CubeSat et du système de contrôle d'attitude et d'orbite. Des exercices plus poussés sont ensuite proposés, recouvrant la représentation d'attitude, les équations du mouvement, les couples perturbateurs et le contrôle d'attitude, la propulsion et enfin les lois de commande. La majeure partie des aspects abordés dans ce cours trouvent ainsi un écho dans ces exercices.
QCM sur la partie "découvrir"
Auteur: Gary Quinsac
Découvrir
Ce QCM reprend des notions de la partie "Découvrir". Pour certaines questions plusieurs réponses sont possibles.
Difficulté : ☆
1)
Comment nomme-t-on une orbite circulaire autour de la Terre à une altitude de 300 km ?
Acronyme anglais.
2)
Dans quelle classe de satellite se trouvent les CubeSats ?
Les satellites sont habituellement classés en fonction de leur masse.
3)
Quelle est la phase de construction d'un véhicule spatial ?
La construction intervient tardivement dans les phases de réalisation d'un projet spatial.
4)
Quels sont les avantages offerts par le standard CubeSat ?
Tous ces avantages découlent de la standardisation des interfaces.
5)
Quels sous-systèmes font partie de la plateforme du satellite ?
Le segment spatial se constitue de la plateforme et de la charge utile.
6)
Quels sont les domaines de longueur d'onde absorbés par l'atmosphère ?
Cette absoprtion par l'atmosphère est l'une des raisons d'être des premiers observatoires spatiaux.
7)
Quelle est la masse d'un CubeSat 6U d'après les standards qui vous ont été présentés ?
8)
Quel est le secteur d'utilisation des CubeSats montrant parfaitement l'adoption généralisée de ce standard ?
9)
Quel est le type de mouvement en jeu lorsque l'on parle de contrôle d'attitude ?
Le contrôle d'attitude concerne l'orientation du satellite dans l'espace.
10)
Comment nomme-t-on le sous-système chargé de modifier la trajectoire du satellite ?
Exercices : Représentation d'attitude
Auteur: Gary Quinsac
Matrice du Cosinus Directeur
Difficulté : ☆
On souhaite montrer que la MCD est une matrice orthonormale, c'est-à-dire que .
Soit la MCD entre deux référentiels orthogonaux décrits par les vecteurs unitaires et :
Question 1)
Ecrire le vecteur transposé de .
Question 2)
Calculer le produit et conclure.
Auteur: Gary Quinsac
Angles d'Euler
Difficulté : ☆
Cet exercice a pour but de démontrer l'expression de la MCD à partir d'une certaine séquence d'angles d'Euler. On reprend la notation du cours en nommant , et les trois angles d'Euler.
Question 1)
Démontrer qu'en choisissant la séquence afin de passer du référentiel au référentiel , on obtient bien la formule présentée dans le cours :
Exprimer les trois rotations élémentaires telles que présentées dans le cours.
Exprimer la matrice issue de la combinaison des rotations suivantes :
Question 2)
Considérons maintenant la séquence suivante : . Exprimer la MCD associée à cette séquence.
Suivre les mêmes étapes que pour la question précédente.
Auteur: Gary Quinsac inspiré de "Space Vehicle Dynamics and Control" de Bong Wie.
Quaternions
Difficulté : ☆
Considérons la séquence de rotations fixées par rapport à un satellite allant du référentiel au référentiel :
Les quaternions associés à ces rotations sont :
, ,
Question 1)
Montrer que les angles d'Euler de cette séquence de rotation sont reliés aux quaternions de la manière suivante :
où et
Utiliser le cours sur les séquences de rotations exprimées en termes de quaternion et la multiplication des quaternions.
Question 2)
Vérifier que pour des angles infinitésimaux on obtient un quaternion très simple.
Effectuer le développement limité de du quaternion obtenu précédemment.
Exercices : Equations du mouvement
Auteur: Gary Quinsac
Cinématique d'attitude avec la MCD
Difficulté : ☆☆
On souhaite démontrer l'équation de la cinématique exprimée avec la MCD.
avec et
Soit la MCD entre deux référentiels orthogonaux décrits par les vecteurs unitaires et .
Question 1)
Rappeler la propriété principale de la MCD .
Voir le cours où l'exercice sur la représentation d'attitude avec la MCD.
Question 2)
Exprimer la dérivée de l'équation exprimant un vecteur du référentiel (B) en fonction d'un vecteur du référentiel (A).
Exprimer la relation de passage du vecteur au vecteur .
Prendre la dérivée de l'équation précédente.
Question 3)
Obtenir l'équation de la cinématique exprimée avec la MCD.
Exprimer le vecteur de vitesse angulaire de par rapport à et l'insérer dans l'équation précédente.
Remplacer par la matrice antisymétrique :
Question 4)
À partir de l'équation de la cinématique que nous venons de démontrer, exprimer les différentes coordonnées du vecteur vitesse angulaire.
Il s'exprime en fonction des différents éléments de la MCD et de sa dérivée.
Auteur: Gary Quinsac
Cinématique d'attitude avec les angles d'Euler
Difficulté : ☆☆
Cet exercice cherche à établir les équations de la cinématique pour certaines représentations d'Euler. Les premières questions considèrent la séquence d'Euler permettant de passer du référentiel (A) au référentiel (B) suivante :.
Question 1)
Ecrire les trois vecteurs vitesse angulaire correspondant à chaque transformation élémentaire en fonction des dérivées des angles d'Euler.
Penser à introduire les référentiels intermédiaires.
Question 2)
Exprimer le vecteur de vitesse angulaire en fonction des vecteurs de vitesse angulaire précédents.
Question 3)
Reformuler cette équation afin de faire apparaître les vecteurs de base des différents repères.
Question 4)
Exprimer les vecteurs de base des repères et en fonction de ceux de (B).
Question 5)
Montrer la relation de la cinématique pour cette séquence d'Euler :
Question 6)
Considérons maintenant la séquence suivante : . Exprimer alors l'équation de la cinématique.
Suivez les mêmes étapes que pour la question précédente.
Auteur: Gary Quinsac
Cinématique d'attitude avec les quaternions
Difficulté : ☆☆
Il est maintenant question de démontrer l'équation de la cinématique avec les quaternions.
Question 1)
Reprendre la forme de l'équation de la cinématique trouvée dans la dernière question du premier exercice sur les équations du mouvement :
Utiliser une propriété remarquable de la matrice de quaternion obtenue dans la questions précédente pour exprimer la dérivée du quaternion.
La matrice de quaternion obtenue est orthonormale.
Question 5)
Réécrire l'équation afin d'obtenir l'équation de la cinématique avec les quaternions.
Exercice : Couples perturbateurs sur un CubeSat
Auteur: Gary Quinsac
Couples perturbateurs agissant sur un CubeSat
Difficulté : ☆☆
Une mission scientifique nécessite l'envoie d'un CubeSat 3U sur une orbite circulaire à 300km d'altitude (ce qui correspond à une vitesse de 7726 m/s). On considère que le centre de masse de satellite se trouve décalé du centre géométrique de + [1; 1; 2] cm et que la surface du satellite est homogène. Étant donnée l'altitude, il est possible d'utiliser le champ magnétique pour effectuer le contrôle de l'attitude du CubeSat. Une combinaison de trois magnétocoupleurs, chacun étant orienté selon un axe du satellite, est proposée. Le courant maximum parcourant les bobines est ±0,2 A et le rayon du fil mesure 10,4 mm.
Voici différentes données nécessaires :
Données
Masse volumique de l'atmosphère à 300 km
Coefficient de trainée
Constante gravitationnelle de la Terre
Rayon de la Terre
Irradiance solaire moyenne
Coefficient de réflexion moyen du satellite
Champ magnétique terrestre à 300 km
Dipôle résiduel du satellite
Courant maximum dans magnéto-coupleurs
Diamètre de la bobine des magnéto-coupleurs
CubeSat 3U
CubeSat 3U de longueur l, de côtés a et b et de moments d'inertie Ixx, Iyy et Izz.
Crédit :
Gary Quinsac
Question 1)
Que signifie le fait que la surface du satellite est homogène ?
Question 2)
Estimer les dimensions et la masse totale du satellite.
C'est un CubeSat 3U et on sait qu'une unité représente un cube de 10 cm d'arête et de 1,3 kg.
Question 3)
Quels sont les principaux moments d'inertie du satellite ?
Comme première approximation, on peut considérer que le satellite est homogène et que son centre de masse se trouve parfaitement localisé en son centre. Les moments d'inertie principaux peuvent donc s'exprimer :
Question 4)
Identifier les couples perturbateurs.
Ils sont au nombre de 4.
Question 5)
Exprimer les couples perturbateurs maximums créés par les différentes perturbations agissant sur le satellite si son axe +Y est aligné avec sa vitesse. On utilisera les notations données en introduction de l'exercice.
Pour la trainée atmosphérique :
Déterminer l'aire projetée le long de la direction du mouvement.
Exprimer la force de trainée atmosphérique :
Utiliser la position du centre de masse pour calculer les couples de trainée atmosphérique selon les trois axes principaux du satellite :
Pour le gradient de gravité :
L'axe +Y étant parallèle à la vitesse du satellite et la trajectoire étant circulaire, le rayon vecteur de la force de gravitation se décompose dans le plan X-Z .
La matrice d'inertie s'exprime :
Appliquer la formule vue dans le cours :
En exprimant le produit vectoriel, on se rend compte que le maximum correspond à .
Pour la pression solaire :
Consider l'un des pires cas, c'est à dire que les faces +X ou +Y sont parfaitement orientées vers le Soleil, et en déduire la surface exposée et l'angle d'incidence.
Exprimer la force de pression de radiation solaire : avec et .
Utiliser la position du centre de masse pour exprimer les couples de pression de radiation solaire selon les trois axes principaux du satellite :
Pour le gradient magnétique :
Identifier le pire alignement entre le satellite et le champ magnétique terrestre : lorsque le dipôle résiduel et le champ magnétique sont perpendiculaires.
Le couple correspondant est simplement le produit de ces deux valeurs :
Question 6)
Estimer l'ordre de grandeur de la somme de tous les couples perturbateurs agissant sur le satellite.
Question 7)
Combien de spires la bobine du magnétocoupleur doit-elle contenir pour contrebalancer le couple perturbateur précédemment estimé ?
Les magnéto-coupleurs doivent pouvoir compenser tous les couples perturbateurs agissant sur le satellite. Ils doivent donc au moins fournir N.m.
Rappelons les équations permettant de calculer le couple magnétique et le moment dipolaire :
et , où N est le nombre de spire de la bobine.
Exercice : Propulsion
Auteur: Gary Quinsac
Exercice
Difficulté : ☆
On reprend le CubeSat présenté lors de l'exercice précédent. Cette fois-ci, nous nous plaçons dans le cas où celui-ci doit effectuer une manœuvre orbitale nécessitant un incrément de vitesse de 50 m/s. Six systèmes de propulsion vous sont proposés, chacun étant défini par sa masse sèche Msèche (masse du système de propulsion sans le carburant), son impulsion spécifique Isp, sa force de poussée F et sa consommation électrique P.
Systèmes de propulsion
Type de propulsion
Modèle
Msèche [kg]
Isp [s]
F [N]
P [W]
Gaz froid
Palomar MiPS
0,89
50
3,5.10-2
5
Mono-carburant
BGT-X5
1,24
220
5.10-1
20
Bi-carburant
PM200
1,10
285
5.10-1
6
Électromagnétique
PPTCUP
0,28
670
4.10-5
2
Électrostatique
IFM Nano
0,64
3800
3,5.10-4
32
Question 1)
Quel lien peut-on faire entre la vitesse d'expulsion du carburant l'impulsion spécifique Isp ?
Cette relation s'obtient facilement à partir de la relation exprimant la force en fonction de la vitesse d'expulsion et la définition de l'impulsion spécifique.
Question 2)
Estimer la quantité de carburant nécessaire pour effectuer la manœuvre souhaitée avec chacun des systèmes de propulsion.
Le CubeSat faisant 3 unités, on peut estimer que sa masse totale est de 4 kg.
Question 3)
Sachant que l'on cherche généralement à éviter d'allouer plus de 33% de la masse d'un satellite au système de propulsion
Il faut sommer la masse de carburant et la masse sèche afin d'obtenir la masse du système de propulsion dans son ensemble. Ceci n'est qu'une première approximation, notamment car on ne prend pas en compte la masse supplémentaire correspondant à des réservoirs plus gros.
Question 4)
La puissance électrique disponible à bord d'un CubeSat 3U recouvert de panneaux solaires en orbite autour de la Terre est estimée à 7 W. Qu'est-ce que cela change au niveau de vos choix ?
Question 5)
En supposant que l'efficacité de la manœuvre ne dépend pas du lieu où celle-ci est effectuée, c'est à dire du moment, combien durerait-elle pour chacun des systèmes de propulsion proposés ? Cette hypothèse est fausse dans de nombreux cas, notamment lorsque les forces de poussée en jeu sont faibles et les manœuvres importantes (ce qui est le cas ici).
Dans ce cas, la durée de la manœuvre est directement liée à la force de poussée.
Exercices : Lois de commande
Auteur: Gary Quinsac
Étude d'un ressort
Difficulté : ☆
Cet exercice a pour but de vous entraîner à utiliser les transformations de Laplace pour résoudre une équation différentielle.
Considérons une masse m accrochée à un ressort de constante de rappel K. On mesure le déplacement vertical de la masse, provoqué par une stimulation u(t), par la grandeur x. L'installation est illustrée par cette figure.
Ressort
Crédit :
Gary Quinsac
Question 1)
Quelle est l'équation de déplacement de la masse ?
Question 2)
On veut étudier le cas d'une stimulation impulsionnelle. Que devient u(t) ?
Question 3)
Exprimer la fonction de transfert du système.
Il faut prendre la transformée de Laplace de l'équation exprimée précédemment.
Les conditions initiale sont supposées nulles.
Question 4)
Effectuer la transformée de Laplace inverse de la fonction de transfert afin d'exprimer le déplacement issu d'une stimulation impulsionnelle dans le domaine temporel.
Question 5)
Supposons maintenant que la stimulation n'est plus impulsionnelle mais une rampe . Afin d'obtenir la réponse dans le domaine temporel, il faudrait faire le produit de convolution de cette rampe avec la réponse impulsionnelle :
Passer par la transformée de Foutier.
C'est une simple multiplication.
Auteur: Gary Quinsac
Représentation de la boucle de contrôle d'attitude
On note R(p) le signal de référence, Y(p) le signal de sortie, D(p) la perturbation, U(p) le signal de contrôle, Gc(p) le contrôleur, E(p) l'erreur, Gp(p) le matériel à contrôler et C(p) la dynamique des capteurs.
Question 1)
Exprimer le signal de sortie en fonction du signal de contrôle.
Question 2)
Sachant que l'on considère que les perturbations sont nulles, exprimer le signal de contrôle en fonction de l'erreur.
Question 3)
Appliquer la même approche pour trouver l'expression de l'erreur.
Question 4)
Réorganiser les résultats précédents afin de retrouver l'expression de la fonction de transfert.
Mini-projets
Auteur: Gary Quinsac
Présentation des mini-projets
Objectifs des mini-projets
Quatre mini-projets vous sont proposés afin de tester vos connaissances. Si certaines informations utiles peuvent être retrouvées dans le cours, il sera également nécessaire d'aller en chercher en dehors. Une liste de questions commune aux différents mini-projets vous est proposée, tâchez d'y répondre pour chacun des cas présentés. Ce cours n'étant qu'une introduction aux nanosatellites et au contrôle d'attitude et d'orbite, les questions sont avant tout qualitatives. De plus, face à la complexité d'une mission spatiale, une approche plus poussée nécessiterait de répondre à ces questions plusieurs fois, de manière itérative, afin de prendre en compte l'impact de chaque décision sur les choix effectués précédemment.
Le travail d'un ingénieur spatial est de développer une mission capable de répondre à des besoins. Dans notre cas, ces besoins sont spécifiés par des chercheurs. Quatre missions nous ont ainsi été proposées. Nous intervenons au tout début de ces projets puisque nous sommes chargés d'étudier leur faisabilité.
Étude de l'ionosphère terrestre
Il nous est demandé d'étudier l'ionosphère terrestre. L'ionosphère représente l'atmosphère supérieure d'une planète, de 85 à 600 km d'altitude, une région où le gaz est partiellement ionisé par les radiations solaires. Son fonctionnement est important car elle constitue la partie intérieure de la magnétosphère de notre planètre. Elle joue notamment un rôle essentiel dans les télécommunications et la géolocalisation par satellite, puisqu'elle a tendance à retarder voire même réfléchir certains signaux. Si de nombreux satellites ont déjà acquis des données sur ce milieu, son étude est plus que jamais d'actualité.
Afin d'effectuer des mesures du contenu de l'ionosphère terrestre, il nous est demandé d'utiliser une sonde de Langmuir. C'est un appareil capable de mesurer la température électronique, la densité électronique ainsi que le potentiel électrique du plasma. Une telle sonde permet d'étudier le plasma in-situ, c'est-à-dire à l'endroit où elle se trouve.
Démonstration technologique d'une nouvelle optique de télescope.
Une équipe de chercheurs est en train de développer une nouvelle optique permettant d'améliorer grandement la performance des télescopes d'observation de la Terre en orbite basse. Afin de qualifier en vol leur système, dernière étape de leur développement, ils souhaitent l'embarquer sur un CubeSat. L'ensemble du télescope avec son électronique de lecture doit faire 1,5 U de volume. La lecture se fait avec un capteur CMOS.
Observation d'un transit d'exo-planète
Suite à la première tentative initiée par la mission PICSAT de l'Observatoire de Paris, des scientifiques veulent observer un nouveau transit d'exoplanète. L'étoile autour de laquelle orbite cette exoplanète se trouve dans le plan de notre galaxie. Le même instrument scientifique que celui embarqué par Picsat est envisagé. Son utilisation permet d'effectuer la photométrie du transit, c'est-à-dire de mesurer la luminosité de l'étoile brillante.
Géodésie d'un astéroïde
Surfant sur la recrudescence de missions d'étude d'astéroïdes, un chercheur nous propose une mission d'accompagnement avec un CubeSat. La mission principale doit étudier le système d'astéroïdes géocroiseur nommé 65803 Didymos. Un CubeSat présente l'intérêt de pouvoir s'approcher beaucoup plus proche du système d'astéroïde (faibles risques associés à son faible coût). Les perturbations provoquées par les astéroïdes lors des survols doit permettre d'en déduire leur champ gravitationnel. Pour ce faire, une mesure précise de l'orbite du satellite est nécessaire. De l'astronomie radio-science est envisagée pour réaliser la mesure précise de la position du CubeSat au cours des survols.
Le CubeSat permet d'étudier les populations d'astéroïde (masse, composition...) et en particulier les nombreux astéroïdes doubles pourtant complexes à examiner. L'enjeu est de comprendre leur origine et leur contribution dans la formation du système solaire. D'une manière plus générale, cette étude doit également permettre d'identifier les lois régissant la formation des systèmes exo-planétaires. C'est cette technique qui a permis d'obtenir la majorité des informations concernant la structure interne des corps du système solaire.
L'utilisation d'un transpondeur similaire à ceux utilisés pour la télécommunication nous offre le suivi du CubeSat depuis le sol ou un autre satellite en effectuant des mesures d'effet Doppler et de distance. Ces mesures permettent d'obtenir la vitesse radiale et la distance entre le CubeSat et l'observateur, permettant de calculer son accélération et de déduire in fine le champ gravitationnel de l'astéroïde. Afin d'obtenir des mesures suffisamment précises, le transpondeur Iris, développé par le JPL, est proposé. Cela veut dire que le suivi peut se faire depuis la mission principale ou depuis le sol avec un réseau d'antennes tel que le Deep Space Network ou le ESA Tracking Network..
On peut voir une sonde de Langmuir embarquée par le satellite Demeter.
Crédit :
CNRS
Télescope d'observation de la Terre
Télescope hyperspectral d'observation de la Terre EnMAP.
Crédit :
DLR
Transit de Vénus
Photographie pris lors du dernier transit de Vénus devant le Soleil en 2012.
Crédit :
ESA
Mission AIDA
Vue d'artiste de la mission AIDA accompagnée d'un CubeSat autour du système d'astéroïdes Didymos. AIDA observe l'impact de la mission DART sur l'astéroïde principal.
Crédit :
ESA/Science Office
Questions
Voici une liste de questions auxquelles vous devez essayer de répondre, en le justifiant, pour les quatre missions qui vous ont été proposées.
I - Considérations générales
Étant donné le principe de fonctionnement de l'instrument que nous devons embarquer, quel type de mission envisagez-vous (orbite, nombre de CubeSats...) ?
Qu'est-ce que cela implique concernant le lancement ?
Que pensez-vous des besoins de télécommunication ?
La gestion d'énergie sera-t-elle un aspect critique de cette mission ?
Quel format de CubeSat proposez-vous ?
II - Focalisation sur le SCAO
Que pouvez-vous dire des effets environnementaux sur le contrôle d'attitude ?
Quels besoins identifiez-vous en termes de contrôle d'attitude ?
Ces besoins nécéssitent-ils un contrôle fin de l'attitude des satellites ?
Quels capteurs et actionneurs recommandez-vous ?
Sera-t-il nécessaire d'effectuer des manœuvres orbitales ?
Si oui, évaluez ce que cela représente en budget ΔV.
Quel type de propulsion vous semble le plus adapté ?
Imagerie directe d'exoplanètes
Auteur: JLB
Imagerie directe d'exoplanètes
Bienvenue dans ce cours portant sur l'imagerie directe des exoplanètes.
Vous allez découvrir ici cette technique de prospection et d'étude, à la pointe de la technologie et qui fait partie des quelques méthodes pouvant prétendre à la découverte d'une planète jumelle de la Terre...
La première exoplanète découverte par imagerie directe
C'est en 2004 que Gaël Chauvin et ses collaborateurs publient dans Astronomy and Astrophysics la première image potentielle d'une exoplanète, autour de la naine brune 2M1207 (un étoile qui ne fusionne pas l'hydrogène car trop légère pour atteindre les condition extrêmes nécessaires, voir cours sur la Formation et évolution II.A.2. ) grâce à l'instrument NaCo du VLT. [Pour plus d'informations cliquez ici]
Malheureusement, à cause de leurs distances, il est exclu pour le moment de pouvoir distinguer le disque de n'importe laquelle des exoplanètes connues. Nous les voyons donc comme une source ponctuelle, et de plus, l'image de ce point est déformée par l'optique de l'instrument utilisé.
L'image que l'on obtient
Une observation de β Pictoris b (dans les cases du bas, la planète est la tache blanche en haut à gauche du centre de l'image).
Les planètes du système solaire sont facilement observables, la plupart le sont même à l'oeil nu ! Et pendant des siècles on les a étudiées uniquement par l'imagerie dans le visible, d'abord à l'oeil nu puis avec des lunettes et des télescopes.
Le système solaire
Schéma du système solaire. Les tailles des objets sont à l'échelle, mais pas les distances !
Chercher à faire l'image d'une planète tournant autour de son étoile peut sembler, de prime abord, la meilleure façon de découvrir une exoplanète.
À la différence des méthodes comme la vélocimétrie radiale ou l'étude des transits, l'idée n'est pas ici d'étudier une étoile perturbée par de la présence d'une planète mais bien d'étudier la lumière de la planète elle-même. Cette lumière comprend pour partie la lumière de l'étoile réfléchie par la surface de la planète et, pour partie, de la lumière émise par la planète elle-même.
Une planète possède une luminosité très faible par rapport à son étoile hôte, cette dernière est aveuglante en comparaison !
Et l'on doit pouvoir séparer, sur le détecteur, l'étoile et la planète, très proches l'une de l'autre (8 minutes-lumière pour une planète à une unité astronomique de son étoile) mais toutes deux situées à plusieurs années-lumière de nous !
Pour se faire une idée de la difficulté
Imaginez une gardien de phare avec une chandelle juste à coté de la lanterne du phare. Maintenant prenez la mer jusqu'à ne plus voir la lumière du phare que sous forme d'un point et trouvez un moyen de voir la lumière de la flamme de la chandelle ! Voilà une idée de la difficulté du travail à effectuer.
L'imagerie directe permet d'accéder aux planètes situées loin de leur étoile et suffisamment grosses (de masse supérieure à celle de Jupiter).
Ces planètes sont difficiles à déteminer par les méthodes indirectes (transits ou vitesses radiales) car elles demandent une étude sur au moins une période orbitale complète, soit plusieurs (dizaines d') années .
Répartion des planètes suivant les méthodes de détection
Répartition des exoplanètes en masse/période, les points verts sont les planètes observées par imagerie directe.
Si on arrive à identifier la lumière émise par une planète, et que la quantité de lumière reçue est suffisante,
on peut la décomposer par spectroscopie.
Cette technique nous permet de déterminer la composition chimique de l'atmosphère de la planète,
d'obtenir des informations, comme la température efficace (ou effective temperature en anglais).
Cette technique nous permettra peut être un jour prochain d'identifier la première exo-Terre dotée d'une atmosphère ressemblant à la nôtre...
La formation des planètes et la formation des systèmes planétaires sont des phénomènes encore mal compris, augmenter
nos connaissances sur les planètes géantes, jeunes, éloignées de leur étoile, nous permettra de déterminer lesquels parmi les modèles actuels sont valides.
Image d'une planète en formation ?
En 2013 Sascha Quanz et collaborateurs publient dans the Astrophysical Journal un article sur une potentielle planète en formation détectée par l'instrument NaCo au télescope VLT (Very Large Telescope). [Pour en savoir plus cliquez ici]
Or les jeunes Jupiter sont justement les cibles privilégiées de l'imagerie directe, voyons pourquoi dans les écrans suivants ...
Cibles
Auteur: JLB
Choisir des cibles
L'observation par imagerie directe nécessite certaines conditions sur les cibles observables :
Comparaison de la distribution des flux spectraux lumineux émis (en échelle logarithmique) en fonction de la longueur d'onde dans le système solaire.
La composante de gauche du spectre (autour d'un micron) correspond à la réflexion de la lumière du soleil sur la planète, la partie droite autour de 20 µm correspond au rayonnement thermique émis par chaque planète et dépendant de sa température.
C'est en comparant les flux lumineux du Soleil et de ses planètes que l'on peut remarquer au moins deux choses :
le contraste entre la lumière provenant du Soleil et celle provenant des planètes est très important (entre 4 et 10)
⇒ dans ces conditions il est très difficile d'identifier la lumière en provenance de la planète dans un flux de lumière émanant de l'ensemble étoile+planète(s).
il existe des plages de longueurs d'onde (appelés domaines spectraux) où le contraste est un peu plus favorable
⇒ nous pouvons identifier des filtres photométriques et des domaines spectraux dans lesquels il est plus simple de faire ressortir la lumière d'une planète (par exemple, pour observer Jupiter de l'extérieur du système solaire, le meilleur contraste se situe autour de 50 µm).
Attention : un contraste d'un facteur X correspond à un rapport de!
Luminosités
Comme vous pouvez facilement l'imaginer, pour pouvoir détecter/voir la planète, la différence de luminosité entre l'étoile et la planète doit être aussi faible que possible. Il est donc plus facile de chercher des exoplanète autour d'étoiles peu brillantes.
La luminosité de l'étoile dépend de sa température, cette dernière dépendant de sa masse, et la durée de vie d'une étoile st inversement proportionnelle à cette masse. Suivant sa position dans le diagramme HR (voir ci-dessous) l'étoile évolue donc plus ou moins vite.
Diagramme de Hertzsprung-Russell
Le diagramme HR, pour diagramme Hertzsprung-Russell, permet de classer un étoile grâce à sa luminosité en fonction de sa température. Sur la séquence principale (Main sequence, V, ou MS) on trouve les étoiles fusionnant l'hydrogène (comme le Soleil). En haut à gauche donc à forte température et luminosité, on trouve les étoiles bleues, très jeunes, et en bas à droite les naines rouges qui sont peu brillantes et à faible température.
Si on cherche à étudier les exoplanètes autour d'une étoile de faible luminosité, on va donc être intéressé par des étoiles de faible masse et faible température, voire même par des naines brunes.
Dans les faits, la première exoplanète imagée l'a été autour d'une naine brune.
Mais une planète comme β Pictoris b tourne autour d'une étoile A (blanc-bleutée) de la séquence principale ! Comment se fait-il que l'on puisse imager une planète autour d'une étoile aussi brillante ?
Une étoile de type A est très massive, elle quitte donc rapidement la séquence principale. Une étoile A sur la séquence principale est donc jeune, et ses planètes le sont aussi : ainsi β Pictoris a un âge compris entre 10 et 20 millions d'années seulement.
Pourquoi est-il intéressant de cibler un système planétaire si jeune ?
Les sources d'énergie permettant à une planète de rayonner peuvent être de deux types :
externe : l'étoile, dont le rayonnement est soit directement réfléchi, soit absorbé puis réémis de façon thermique
=> le flux reçu par la planète étant inversement proportionnel au carré de la distance la séparant de l'étoile, cette composante sera négligeable pour des planètes éloignées de leur étoile .
interne : par exemple provenant de l'énergie résiduelle du processus de formation
=>une planète jeune, née d'un processus cataclysmique, sera un objet très chaud se refroidissant avec le temps.
Courbes d'évolution de la luminosité d'une planète
En 2012 Christoph Mordasini et collaborateurs présentent dans Astronomy & Astrophysics, un modèle d'évolution planétaire. Vous pouvez voir ici l'évolution de la luminosité (comparée à la luminosité solaire, le tout en échelle logarithmique) de planètes de type géante gazeuse (comme Jupiter) en fonction du temps. Observez le pic autour d'un million d'années qui survient à la fin du processus de formation et à partir duquel la luminosité se met à chuter.
Distances
Comme nous l'avons présenté précédemment, notre problème est similaire à celui d'observer à plusieurs kilomètres de distance la lumière d'une chandelle posée à côté de la lampe d'un phare.
Si vous collez la chandelle à la lampe du phare vous n'avez aucune chance de la voir car vous serez totalement éblouis. En revanche, si vous attachez la chandelle à un bras télescopique de plusieurs mètres, vous pourrez la détecter plus facilement.
De plus, si, avec votre bateau, vous vous éloignez trop du phare, vous êtes sûr de ne pas pouvoir observer la chandelle.
Pour augmenter les chances d'observer directement une exoplanète, il faut donc que la séparation apparente entre l'étoile et l'exoplanète sur le ciel soit aussi grande que possible, ce qui nécessite :
que l'exoplanète soit aussi éloignée de son étoile que possible ;
et/ou que l'exosystème soit aussi proche que possible de l'observateur.
Exemple de relation distance,orbite,distance angulaire
La première planète imagée orbite à environ 55 fois la distance Terre-Soleil de son étoile hôte, qui elle-même se trouve
à 70 pc de nous. Cela se traduit par une distance angulaire de 778 mas (milliarcsecondes), ce qui est accessible aux grands télescopes actuels.
Dans les écrans qui suivent vous trouverez quelques exemples d'instruments qui sont utilisés ou vont être utilisés dans un proche avenir pour imager les exoplanètes. Cette liste est loin d'être exhaustive mais se veut constituée d'exemples concrets d'instruments dédiés ou non à cette technique.
Dans l'espace
En premier lieu nous présentons deux satellites dont les archives (observations anciennes) regorgent peut-être de planètes à découvrir (avis aux amateurs) :
De nombreux concepts de satellites dédiés à l'imagerie directe ont été développés, que ce soit par coronographie ou interférométrie, à l'instar de SPICES, Darwin ou TPF. Les développements techniques pour permettre la réalisation de ces missions sont en cours au moment où sont rédigées ces lignes.
Au sol
Les deux instruments au sol que nous présentons ici sont des instruments européens (contrairement à Hubble et Spitzer qui sont pour leur part américains). Il s'agit de NaCo et de SPHERE.
Ce second instrument, SPHERE, fait partie d'une génération d'instruments pour grands télescopes qui comprend, entre autres, le Projet 1640, MagAO et GPI . L'arrivée de tous ces instruments, pour la plus part dédiés à l'imagerie directe d'exoplanètes, promet une moisson de découvertes dans les prochaines années.
Satellites
HST
Le télescope spatial Hubble (Hubble Space Telescope, HST en anglais) de la NASA est une des sources d'images d'exoplanètes. Son principal point fort est de se trouver hors de l'atmosphère et donc d'atteindre un pouvoir de séparation angulaire permettant la détection de l'exoplanète.
Remarque : nous verrons comment l'on tente de corriger les perturbations causées par l'atmosphère terrestres pour les instruments situés au sol, dans la partie sur l'optique adaptative.
Pour l'imagerie directe on utilise ACS (pour Advanced Camera for Surveys) qui possède un coronographe, permettant de masquer la lumière d'une étoile pour voir seulement celle provenant des planètes situées autour (voir suite du cours). Cette caméra, installée en 2002, est la plus utilisée pour l'imagerie astronomique en général. L'autre instrument utilisé est STIS (pour Space Telescope Imaging Spectrograph) qui nous donne par exemple l'image ci-dessous.
Fomalhaut b
Un exemple de détection par HST : Fomalhaut b. Cette planète a été annoncée par Paul Kalas, James R. Graham et collaborateurs en 2008 dans la revue Science, autour d'une étoile âgée de 400 millions d'années et située à 7,7 pc de nous. Une non-détection par un autre satellite a jeté un doute sur son existence (voyez la page suivante)...
Hubble Space Telescope
Crédit :
NASA
Satellites (Suite)
Spitzer
Un autre satellite jouant un rôle important dans l'imagerie directe d'exoplanètes est le télescope spatial Spitzer. C'est le télescope spatial spécialisé dans l'infrarouge de la NASA, il est utilisé dans notre cas pour vérifier la présence de planètes ou pour contraindre leur rayon et leur masse.
C'est l'instrument IRAC (InfraRed Array Camera), qui est utilisé dans une de ses bandes dans le proche infrarouge pour rechercher les jeunes exoplanètes géantes.
Spitzer
Crédit :
NASA
Certains chercheurs expliquent la non-détection par Spitzer de Fomalhaut b (voir la page précédente sur HST) par le fait que la planète serait de faible rayon. Dans ce cas, Spitzer nous donne une limite sur le rayon maximal de la planète.
Son nom vient de la fusion de NAOS et de CONICA, qui sont respectivement un système d'optique adaptative (Nasmyth Adaptive Optics System) et un imageur, polarimètre, coronographe et spectrographe dans le proche infrarouge (Near-Infrared Imager and Spectrograph) et est utilisé par de nombreuses communautés d'astronomes.
NaCo
Crédit :
ESO
La première exoplanète découverte par imagerie directe
L'instrument SPHERE installé sur la plateforme d'un des télescope du VLT.
Crédit :
ESO
Illustrations
Auteur: JLB
Quelques observations
Pour conclure cette partie d'introduction sur le sujet de l'imagerie directe des exoplanètes, voici deux exemples de systèmes planétaires, confirmés et étudiés.
Autour de l'étoile HR 8799 se trouve un système d'au moins 4 planètes géantes plus massives que Jupiter, c'est une étoile jeune (moins de 100 millions d'années), chaude (7230 K de température efficace) et plutôt proche de nous (40 pc).
HR8799
En 2010 Christian Marois et collaborateurs ont publié dans Nature la découverte d'une quatrième planète (HR8799 e) autour de l'étoile HR 8799 observée avec le télescope Keck II.
Ce système de planètes nous permet de rappeler ici la nomenclature utilisée actuellement pour nommer une exoplanète : on commence par le nom de son étoile hôte suivi d'un lettre minuscule partant de "b", les lettres étant distribuées dans l'ordre de découverte des exoplanètes qui ne correspond pas forcément avec un ordre de taille ou de distance à l'étoile hôte. Ainsi, HR 8799 e a été la dernière à être découverte car la plus proche de son étoile et donc la moins facilement séparable.
Comparaison avec le système solaire
Répartition en demi-grand axe (en unités astronomiques, avec une échelle logarithmique) des planètes dans le système HR8799 (en blanc) comparé au Système solaire (en jaune). Le diamètre de chaque point varie en fonction de la masse de la planète.
Beta Pictoris
Autour de la jeune (20 millions d'années) et chaude (8040 K de température efficace) étoile β Pictoris tourne la planète β Pictoris b, située à seulement 20 pc (60 années-lumière) de nous. C'est un jeune Jupiter massif qui perturbe le disque de gaz et de poussières gravitant autour de son étoile.
Beta Pictoris b
En 2009 Anne-Marie Lagrange et collaborateurs publient dans Astronomy and Astrophysics la première image de β Pictoris b, prise avec NaCo au VLT.[Pour plus d'informations cliquez ici]
Une planète jeune et proche de son étoile
Voici la répartition des planètes observées par imagerie directe selon l'âge (en miliards d'années, Gyr) et le demi-grand axe (en unités astronomiques, AU). Vous trouverez, en rouge, l'exoplanète β Pictoris b.
La planètes suivent les lois de la mécanique découvertes par Newton. En particulier, elles sont soumises à la force de gravitation universelle qui définit des orbites képlériennes.
La position et le mouvement relatif de la planète par rapport à son
étoile vont nous permettre de contraindre les éléments de l'orbite (demi
grand axe, inclinaison, excentricité), sa période et donc les masses des
corps.
Éléments d'une orbite
A – planète
B – étoile
C – plan de référence, l'écliptique
D – Plan orbital de la planète
E – noeud descendant
F – Périapse
G – noeud ascendant
H – Apoapse
i – Inclinaison
J – Direction de référence (ligne de visée)
Ω – Longitude du noeud ascendant
ω – Argument du périapse
Une planète commence sa formation sous la forme d'un noyau solide qui grossit par accrétion de matière.
Si la masse de ce planétoïde dépasse quelques dizaines de (1 correspondant à une fois la masse Terre) , l'accrétion de gaz augmente brutalement pour former une planète géante.
Naissance d'une planète géante
En 2012, Christoph Mordasini et collaborateurs publient dans Astronomy and Astrophysics une étude sur la formation des planètes, ici celle de Jupiter, de haut en bas et de gauche à droite, se trouvent l'évolution de la masse, du taux d'accrétion, du rayon et la luminosité de la planète en fonction du temps.
Remarque: Instabilités gravitationnelles
Le modèle précédent, dit de "core accretion" ou accrétion de coeur, n'est pas le seul existant pour expliquer la formation des planètes géantes, un autre modèle est basé sur les modèles de formation des étoiles. En effet les instabilités gravitationnelles dans le disque protoplanétaire provoquent une fragmentation de celui-ci suivi d'effondrements locaux menant à la formation directe d'astres principalement gazeux... Identifier le mode de formation est donc une tache complexe, et l'imagerie directe donne des pistes pour ce faire (notamment la luminosité ou la température en fonction de l'âge de la planète mais aussi sa position par rapport à l'étoile).
Lorsqu'une étoile vient de se former, elle est entourée d'un disque de poussière et de gaz comme β Pictoris par exemple RAJOUTER LE LIEN. C'est dans ce dernier que vont se former les planètes.
Au fil de l'évolution du système planétaire, ce disque va être alimenté par les collisions entre les comètes et les astéroïdes. Ce disque de poussière est très lumineux dans les systèmes jeunes. Il absorbe le rayonnement de l'étoile et son émission (principalement dans l'infrarouge lointain) va avoir tendance à gêner l'observation directe des exoplanètes.
Dans le système solaire le contraste moyen entre la lumière zodiacale et la lumière solaire est de 7 ordres de grandeur.
alors que le rapport des masses entre le disque de poussière et les planètes vaut et que le disque s'étend de 5 à plusieurs centaines d'UA.
Il existe des étoiles autour desquelles on trouve un disque plus de 1200 fois plus brillant, comme η Corvi !
On exprime l'intensité diffusée par la poussière interplanétaire en zodi, 1 zodi étant l'intensité diffusée par le disque de notre système solaire.
Disque
Image composite combinant le disque et la planète en orbite autour de β pictoris (ici masquée, au centre du cercle) .
Tout corps, à une température donnée, émet un rayonnement particulier appelé rayonnement thermique (ou par abus, rayonnement de corps noir, un corps noir étant un corps parfaitement absorbant à toutes les longueurs d'onde).
Le spectre du rayonnement d'un corps noir ne dépend que de sa température . La longueur d'onde où ce spectre atteint son maximum est donnée par la loi de Wien: . , et désignent respectivement les constantes de Planck, la vitesse de la lumière et la constante de Boltzmann. Un corps chaud présente donc un pic d'émission décalé vers les courtes longueurs d'onde par rapport à un corps plus froid. Aux températures ambiantes, ce pic est dans l'infrarouge (dit infrarouge thermique), mais pour des corps atteignant une température plusieurs milliers de Kelvins, ce maximum se décale dans le spectre visible : c'est le cas des étoiles par exemple, ou bien d'un tison chauffé à blanc.
Le flux total (intégré sur toutes les longueurs d'onde) émis par un corps noir ne dépend également que de sa température, suivant la loi de Stefan-Boltzmann : où désigne la constante de Stefan-Boltzmann. Un corps chaud rayonne donc bien davantage qu'un corps froid.
La température du corps noir émettant autant de flux thermique que la planète est appelée température efficace () de la planète. Elle est en règle générale voisine de la température physique de la région de la planète d'où est principalement issue l'émission thermique (atmosphère, voire surface solide pour des planètes telluriques dotées d'une atmosphère mince).
Or, on a pu voir précédemment, que le processus de formation des planètes était un processus impliquant des chocs et autres phénomènes violents, ce qui provoque un dégagement d'énergie considérable sous forme de chaleur.
Evolution température
En 2012, Christoph Mordasini et collaborateurs publient dans Astronomy & Astrophysics une étude sur la formation des planètes, ici celle de Jupiter. En rouge vous pouvez remarquer l'évolution de la température efficace de la planète en fonction du temps.
Vous pouvez remarquer que, une fois formée, plus la planète est jeune, plus elle est chaude, et donc plus important est le flux lumineux qu'elle émet. Mais aussi plus la longueur d'onde du maximum de luminosité est courte (et se rapproche du domaine visible) ! Ainsi Jupiter émet actuellement son maximum d'émission autour de 30 µm, tandis que β Pictoris b l'émet autour de 1,7 µm.
Le rayonnement de corps noir des jeunes exoplanètes géantes culmine généralement dans le proche infrarouge. C'est une chance car il y a de nombreuses raies moléculaires (méthane, monoxyde de carbone...) et atomiques (Na, K ...) dans ce domaine spectral, ce qui permet potentiellement d'analyser la composition chimique de ces planètes.
Pour observer depuis le sol dans ce domaine de longueurs d'onde, il faut hélas se restreindre aux fenêtres de transparence de l'atmosphère terrestre, comme les fenêtres J,H et K situées dans le proche infrarouge (voir l'image ci-dessous).
Filtres J (∼1,1-1,4 μm), H(∼1,5-1,8 μm) et (∼2-2,5 μm)K (en rouge et vert) disponible dans le proche infrarouge à l'ESO, comparé à la transmission de l'atmosphère terrestre (bleu).
La formation des planètes étant quasi-concomittante à celle de leur étoile hôte, on assimile souvent l'âge de la planète à celui de son étoile. Par exemple la Terre a terminé sa formation 20 millions d'années après le Soleil, ce qui est négligeable en comparaison des 4,6 milliards d'années du système solaire.
Fragmentation d'un nuage interstellaire
Modèle de formation de disque protoplanétaire par fragmentations d'un nuage se situant dans le milieu interstellaire. Dans ce nuage un très grand nombre d'étoiles sont en formation en même temps, mais elles sont de masses différentes. Nous allons pouvoir répartir les étoiles résultantes sur un diagramme HR et, suivant leur emplacement, pouvoir dater le groupe d'étoiles et donc contraindre l'âge des exoplanètes possiblement présentes.
Pour déterminer l'âge d'une étoile on peut déterminer, par son mouvement propre, à quel groupe d'étoiles elle appartient. Le groupe d'étoiles, dont les étoiles ont été formées au même moment et se déplaçant dans la même direction, peut nous donner son âge grâce à sa répartition au sein du diagramme HR.
http://astro.unl.edu/naap/hr/animations/hr.html
Activité
Age/Activité
Eric E. Mamajek et Lynne A. Hillenbrand ont publié en 2008 dans the Astrophysical Journal une étude sur les estimateurs d'âge des étoiles de type solaire. Ce graphique nous présente la répartition des âges, en ordonnées (en années et en échelle logarithmique), en fonction d'un marqueur d'activité à savoir : plus il est élevé, plus l'activité est grande. Les courbes représentes plusieurs tentatives pour déterminer une relation entre ces deux observables.
On peut aussi relier, pour un type stellaire donné, l'âge à l'activité et à la couleur de l'étoile. La couleur s'obtient en prenant deux mesures de flux photométriques dans deux domaines de longueur d'onde différents. Pour l'activité, l'observation de plusieurs marqueurs spectroscopiques est possible ainsi que l'émission dans le domaine des rayons X.
Activité/X
Dans le même article de Eric E. Mamajek et Lynne A. Hillenbrand, on trouve ce graphique qui nous présente une relation linéaire entre le marqueur spectroscopique qu'est le et le rayonnement en X .
B-V est l'indice de couleur des étoiles qui peut donc être relié à leur type spectral.
Rotation
La rotation de l'étoile est aussi liée à l'activité et donc à son âge, la comparaison de la rotation propre d'une étoile avec sa couleur va donc nous permettre de remonter à ce premier paramètre, pour un type spectral donné.
Rotation/Activité
L'article de Eric E. Mamajek et Lynne A. Hillenbrand présente enfin ce graphique qui nous présente les relations linéaires entre le marqueur spectroscopique qu'est le et la rotation de l'étoile exprimée par le nombre de Rossby.
Source d'information
Auteur: JLB
Introduction
Les planètes et les étoiles émettent des photons dans l'espace et certains vont arriver jusqu'à la Terre... Notre seule source d'information, ce sont ces photons !
Les observations sont effectuées avec un ou plusieurs télescopes, qui vont collecter et envoyer un grand nombre de photons au foyer de l'instrument. L'image se forme alors sur un capteur CCD (Charge-Coupled Device, dispositif à transfert de charges), qui est un récepteur à photons transformant ces derniers par effet photoélectrique en courant électrique. Ceci permet donc l'enregistrement d'une image notamment pour être envoyée et traitée par un ordinateur.
Sont identifiables sur l'image obtenue par le capteur CCD :
Pour voir la planète, il faut que son image et celle de l'étoile ne soient pas superposées, cela sous-entend que leur écartement angulaire sur le ciel soit suffisamment important. La mesure de cet angle se fait en seconde d'arc (aussi noté "), qui est une subdivision du degré, un degré correspondant à 60 minutes d'arc (60') et une minute d'arc à 60 secondes d'arc (60").
Cette séparation angulaire dépend de la distance séparant les deux corps (voir la partie mécanique) et de la distance séparant le système exoplanétaire de l'observateur terrestre .
Or, si l'on prend un cas typique d'un planète à 100 UA autour d'un étoile située à 10 pc de nous, le rapport vaut plus de cent mille ! La séparation angulaire entre l'étoile et l'exoplanète vues depuis la Terre est alors donnée simplement par la formule trigonométrique . Comme , cette formule se simplifie en si l'on mesure en radians (il faudra alors le convertir en secondes d'arc : ).
Photométrie
La lumière qui nous permet d'identifier la planète provient de plusieurs mécanismes physiques.
L'étoile émet de la lumière au niveau de sa photosphère, dont l'intensité et la couleur vont dépendre de sa température efficace (cf. corps noir).
Mais la planète (suivant son éloignement par rapport à son étoile) va réfléchir une partie de la lumière stellaire suivant son albédo (littéralement sa capacité à réfléchir la lumière). Elle va aussi émettre sa propre émission thermique selon sa propre température efficace. AJOUTER LIEN.
On exprime la différence d'intensité lumineuse entre l'étoile et la planète grâce au contraste, définit comme :
Le contraste en magnitude est défini comme la différence de magnitude (LIEN VERS PAGE SUIVANTE) entre la planète et l'étoile.
Comme nous l'avons vu précédemment, le flux lumineux émis par les planètes du système solaire se compose de deux parties, une partie (au niveau de la flèche rouge) dû à l'albédo de la planète qui va provoquer une réflexion de la lumière solaire (avec un maximum au même endroit que le maximum solaire, puisqu'il s'agit de la même lumière) et une partie d'émission thermique propre (au niveau de la flèche bleue). La température des planètes étant plus froide que celle de leur étoile, ce second maximum local se situe à de plus grandes longueurs d'onde.
Pour mesurer la luminosité d'un objet en astrophysique, on utilise les magnitudes.
Par définition la magnitude est liée au flux spectral émis ou réfléchi par la formule où est le flux spectral d'une étoile de référence (par défaut Véga) qui correspond arbitrairement à une magnitude de 0.
En général on considère deux types de magnitudes :
la magnitude apparente qui correspond à la luminosité observée, notée (minuscule) avec indication optionnelle d'une bande spectrale (ainsi un objet observé dans un filtre V, correspondant à la bande "visible" autour de 551 nm, verra sa magnitude apparente notée ou même )
la magnitude absolue qui correspond à la luminosité apparente de l'objet s'il était placé à 10 pc de nous, notée (majuscule) : avec la distance séparant l'observateur de l'objet en parsec et un facteur de correction provenant de l'absorption par le milieu interstellaire, négligeable sur les courtes distances. Si on consiodère la même bande spectrale que dans l'exemple précédent, la magnitude absolue sera notée .
Les magnitudes sont d'usage courant en astronomie et très utiles. Elles permettent, entre autres choses, de construire des diagrammes couleur-magnitude ou couleur-couleur qui donnent des informations similaires au diagramme HR tout en pouvant être construits beaucoup plus facilement à partir des observations disponibles. Ici, une couleur désigne la différence entre deux magnitudes observées dans deux bandes spectrales différentes.
Diagramme couleur-couleur
Diagramme couleur-couleur comparant les naines rouges (M dwarfs) naines brunes (L et T dwarfs) et les planètes HR8799 b,d et d.
Ici on compare des observations dans l'infrarouge dans avec des filtres K',Ks,L' et M'..
De gauche à droite : image de l’étoile corrigée par optique adaptative, image de l’étoile atténuée par coronographie, SDI, ADI (ces sigles recouvrent des techniques expliquées par la suite).
Une fois les photons observés, il faut trouver puis étudier les éventuelles planètes... Or ce n'est pas chose facile : les planètes ne sont pas du tout visibles directement dans les données brutes (les deux premières images en partant de la gauche de la figure ci-dessus).
Il faudra donc utiliser certains concepts avancés de traitement du signal :
La lumière est une onde électromagnétique, et l'intensité lumineuse est proportionnelle au carré de l'amplitude de cette onde. Comme toute onde, elle est sujette aux phénomènes de diffraction et d'interférence, qui vont être particulièrement importants ici. Ainsi l'image de l'étoile hôte, que l'on assimile a une source ponctuelle vue depuis la Terre, va devenir une tache d'Airy (voir image ci-dessous) sur le récepteur du fait de l'utilisation d'instruments d'ouverture finie (l'ouverture est directement reliée au diamètre du miroir principal du télescope). La lumière de l'étoile va donc s'étaler sur l'ensemble du détecteur, compliquant la détection de la ou des planètes éventuellement présentes !
Il est important de remarquer que cette tache centrale a une taille caractéristique proportionnelle à la longueur d'onde et inversement proportionnelle à l'ouverture du télescope. Cela implique que pour avoir une résolution suffisante, il faut une ouverture en adéquation avec la longueur d'onde : pour pouvoir espérer observer une planète proche de son étoile dans l’infrarouge lointain, il faudrait ainsi un télescope de plusieurs dizaines de mètres d'ouverture !
Image simulée d'une source ponctuelle à travers un instrument d'ouverture finie et circulaire : tache d'Airy
Mais cet aspect ondulatoire présente aussi des avantages : il permet de mettre en œuvre des techniques d'observation basées sur la combinaison de plusieurs télescopes. Ainsi, l'interférométrie permet ainsi de combiner plusieurs télescopes individuels et distants les uns des autres pour obtenir un gain de séparation angulaire. L'interférométrie permet aussi d'occulter l'étoile hôte en jouant sur les interférences destructives.
Comme constaté précédemment, l'image de l'étoile hôte formée sur le récepteur d'un instrument se présente sous la forme d'une tache qui recouvre les images des planètes tournant éventuellement autour d'elle. Notre but va donc être de retirer l'image de l'étoile et d'autres résidus parasites qui pourraient se former à cause des phénomènes de diffraction et d'interférence (les tavelures). Un moyen naturel de retirer la lumière d'une étoile, observable sur Terre depuis l'aube des temps, est le phénomène de l'éclipse solaire, où le Soleil est masqué par la Lune.
Coronographe de Lyot
Schéma original du coronographe de Lyot, tel qu'il le présenta lui-même en 1932. La lentille placée en A forme l'image du soleil sur un disque en B, légerement moins large que l'image du soleil. Puis la lentille C produit une image A'A" sur un diaphragme dont le centre est occupé par le petit écran E. Les bords du diaphragme arrêtent la lumière diffractée par les bords de la première lentille, le petit écran arrête la lumière des images solaires produites par les réflexions parasites sur les faces de la lentille. L'image de la seule couronne solaire finit par apparaître en B'B".
C'est sur ce principe que l'astrophysicien Bernard Lyot développa au début du vingtième siècle un coronographe, instrument qui permet de cacher la lumière du soleil par l'utilisation d'un masque
disposé sur le chemin optique et d'un collimateur pour atténuer les résidus.
Les instruments qui font de l'observation en imagerie directe d'exoplanète utilisent ce même concept, voire des versions plus évoluées : coronographie de phase, coronographie interférentielle achromatique, etc.
Représentation du fonctionnement d'un coronographe de Lyot.
Crédit :
JLB pour SESEP
Voici ce qui se passe dans un coronographe de Lyot, expliqué au moyen de l'optique géométrique. La lumière de l'étoile (vert) et celle de la planète (rouge), sont légerement décalées d'un certain angle sur le ciel. Si l'on place la lumière de l'étoile dans l'axe de l'instrument, celle de la planète arrive avec un certain angle, on dit que la planète est située hors-axe. Une lentille placée en A va donc faire converger en son foyer image les rayons de l'étoile mais pas ceux de la planète, il suffit alors de placer un petit écran au foyer image (dans le plan B) de la lentille (placée en A) pour arrêter toute la lumière provenant de l'étoile et ne garder que celle de la planète, dont on forme finalement l'image seule sur l'écran D.
Malheureusement cela ne fonctionne pas directement. En effet, il faut considérer ici le fait que l'ouverture de l'instrument est finie (le télescope a un certain diamètre), ce que l'on modélise ici par la présence d'un collimateur en A.
Dans le cadre de l'optique ondulatoire, si une onde plane passe à travers un trou, elle change de forme, le trou devient virtuellement l'emplacement d'une nouvelle source de lumière : c'est le phénomène de diffraction. Le principe de de Huygens présente qu'en optique ondulatoire,
chaque point atteint par l'onde se comporte comme une nouvelle source
ponctuelle)
En tenant compte du phénomène de diffraction par l'entrée de l'instrument (rayons en bleu), une partie importante des rayons difractés ne sont pas arrétés par l'écran en B. Il faut donc placer un autre diaphragme sur le chemin, en C, qui va bloquer la plus grande partie des rayons diffractés.
Dans une approche pleinement ondulatoire (on utilisera le formalisme complexe par la suite) : si l'on considère l'amplitude de l'étoile avant l'entrée dans l'instrument de diamètre et sa phase , alors la phase du rayon provenant de la position sur le plan A, vu à la position angulaire au niveau du plan B est donnée par dans l'approximations de Gauss (petits angles hors-axe).
L'amplitude reçue au niveau du plan B depuis tous les points source virtuels dans l'ouverture en A est alors donnée par intégration : ou, en omettant le facteur de normalisation : . L'amplitude de lumière reçue dans l'instrument, venant de l'étoile, est donc dépendante du diamètre de l'instrument et de la longueur d'onde d'observation .
Coronographe, convolution
Coronographie, effets
Image de l'étoile, étape par étape, sur le trajet optique du coronographe.
Crédit :
LESIA
En fait, à chaque étape, les images intermédiaires vont être convoluées (voir ici, partie Transformée de Fourier et de Laplace, là et là) par la fonction de transmission de l'instrument (masque, diaphragmme ...) et va voir son intensité diminuer.
Au niveau du plan C (indiqué par stop dans le schéma ci-dessus), après le passage du masque (mask), on obtient une amplitude de formule : où est la fonction de transmission du masque placé en B. Dans le cadre d'un coronographe, . L'amplitude au niveau du plan C va être donc être atténuée par rapport à celle au niveau du plan B, ce rapport dépendant de celui entre la taille angulaire du masque et l'ouverture de l'instrument.
Au niveau où l'on place le détecteur, en D, l'amplitude finalement observée est donnée par : où est la fonction du transmission du Lyot-Stop, un diaphragme dont on considérera la fonction de tranmission également rectangulaire : .
On montre alors que l'amplitude de la lumière entrant dans l'axe de l'instrument (celle de l'étoile) va diminuer selon le rapport : plus le masque sera grand et le Lyot-Stop fermé, plus la lumière de l'étoile sera "éteinte" et donc plus facilement la planète sera visible. Attention toutefois, la lumière provenant d'une éventuelle planète doit quant à elle être transmise ! Il faut donc trouver un compromis entre la diminution d'intensité de la lumière de l'étoile et la conservation de l'intensité en provenance d'une éventuelle planète, dont on ne connaît pas a priori la séparation angulaire avec l'étoile...
Optique adaptative
Nous venons de voir que la coronographie permet de retirer la majorité de la lumière provenant de l'étoile... mais d'une étoile théorique, considérée comme ponctuelle ! Or il n'y a pas que les effets d'optique ondulatoire au sein de l'instrument qui entrent en jeu, mais aussi (dans le cas des instruments au sol) les effets de l'atmosphère terrestre. À elle seule cette dernière va modifier la forme de l'image de l'étoile, ce qui va accentuer les résidus et ce d'une façon très variable dans le temps, du fait notamment du vent. Ces effets atmosphériques se manifestent par la déformation des fronts d'onde, et dégradent la résolution angulaire de l'instrument au-delà des limites théoriques imposées par l'optique ondulatoire (dépendant de l'ouverture et de la longueur d'onde). Dans les cas les plus extrêmes, ces déformations optiques sont mêmes visibles à l'oeil nu : c'est le fourmillement apparent d'un objet observé au-dessus d'une route asphaltée en été, ou au-dessus d'un barbecue...
Correction
À gauche, une observation sans optique adaptative. À droite la même cible avec optique adaptative, qui nous révèle que l'objet est une en fait une étoile binaire.
Pour s'opposer à ces effets, on utilise l'optique adaptative. Cette technique analyse le front d'onde après réflexion sur un miroir déformable, puis modifie la forme du miroir pour compenser les effets de l'atmosphère en temps réel.
Dans les précédentes parties nous avons vu les techniques utilisées pour retirer la lumière de l'étoile hôte et corriger les perturbations sur le chemin de la lumière... mais ces corrections ne sont pas parfaites !
Sur le détecteur, nous voyons des taches dispersées qui sont les résidus que la coronographie et l'optique adaptative n'ont pas réussi à corriger. Le problème est que ces taches peuvent être prises pour des planètes ou se superposer aux images de ces dernières. Nous allons donc devoir tenter de retirer ces résidus, aussi appelés artefacts.
Exemple de tavelures
Image produite par un faisceau laser après passage dans une fibre optique. On voit des tavelures, les mêmes que l'on pourrait observer. Les causes possibles sont multiples : des fibres optiques (comme ici), mais aussi la turbulence atmosphérique imparfaitement corrigée, les imperfections des miroirs, etc.
Une manière différente d'aborder le problème est de passer par l'interférométrie, et en particulier l'interférométrie annulante. L'idée de base va être d'utiliser au moins deux télescopes assez éloignés pour augmenter la résolution angulaire (et donc bien distinguer l'étoile de l'éventuelle planète), et d'essayer de diminuer l'intensité en provenance de l'étoile (mais pas de la planète !) au moyen d'interférences destructives.
Acquisition
Au lieu d'avoir comme facteur limitant, en résolution angulaire, le diamètre de l'instrument, l'interférométrie permet de passer d'une résolution proportionnelle à à un résolution proportionnelle à où est la ligne de base d'interférométrie (dans le cas de deux télescopes, il s'agit de la distance entre ces deux télescopes). Ces télescopes éloignés sont reliés entre eux par un chemin optique conçu de telle sorte que les interférences produites par la lumière arrivant dans l'axe des télescopes (la lumière de l'étoile) conduisent à une annulation des deux ondes en provenance des deux télescopes. On obtient donc sur le récepteur une figure de franges d'interférences centrées sur l'étoile au coeur d'une frange sombre. Mais la planète, elle, est située hors-axe : elle apparaît donc légèrement décalée et, si la figure d'interférences est correctement mis en place, échappe non seulement aux interférences destructives mais profite même d'interférences constructives pour augmenter le signal.
Interférométrie annulante
Représentation d'une observation par interférométrie annulante. Le disque blanc au centre est placé à l'endroit où se trouve l'étoile, qui se retrouve complètement masquée par les interférences (destructives : bandes noires) alors que les planètes en rouge ne sont pas masquées.
Nous avons parlé précédemment de la coronographie qui est utilisée sur des grands télescopes, notamment ceux de 8 m de diamètre du VLT. Ces instruments travaillent dans le proche infrarouge et le visible mais ne peuvent pas atteindre de plus grandes longueurs d'onde comme l'infrarouge moyen qui serait pourtant très intéressant pour étudier les raies spectrales des molécules, ou pour étudier des planètes plus froides émettant leur spectre thermique à de plus grandes longueurs d'onde. Le problème vient du fait qu'un télescope de 8 m de diamètre ne peut pas facilement séparer les sources à grandes longueurs d'onde, le pouvoir de résolution d'un télescope étant proportionnel à . Il faut donc augmenter la taille du télescope, ou combiner le flux de plusieurs télescopes comme nous le présentons ici. On peut alors aisément obtenir une ligne de base de 100 m en séparant 2 télescopes de cette distance.
Interférométrie annulante
Plusieurs étapes-clés sont à mettre en oeuvre pour l'interférométrie annulante :
Chaque téléscope collecte une partie du même front d'onde en provenance du système exoplanétaire.
On relie les télescopes entre eux par fibres optiques, et on ajuste les chemins optiques dans chaque fibre pour égaliser les phases.
On déphase ensuite au moins l'un des chemins optiques par rapport aux autres (déphasage de 180° dans le cas d'un système à deux télescopes).
On combine alors tous les flux sur le même détecteur.
Ce système annule alors la lumière située sur l'axe optique (celle de l'étoile) par interférences destructives mais pas la lumière hors axe (celle des planètes). Le déphasage en entrée de l'instrument sera donné par où désigne l'écart sur le ciel entre la planète et l'étoile (donc dans une direction normale à l'axe optique), et est la séparation entre la planète et l'étoile dans la direction de l'axe optique.
L'exemple de Darwin/TPF-I
Deux satellites de recherche d'exoplanètes par interférométrie font partie des projets à long terme des agences spatiales européenne et américaine, ce sont respectivement les missions Darwin et TPF-I. Difficiles à mettre en oeuvre techniquement, ces missions nécessitent encore des développements technologiques pour envisager leur réalisation.
Comme vous pouvez le voir sur l'illustration ci-dessus, l'idée et de faire voler en formation 4 quatres satellites "miroirs", combinant leurs faisceaux sur un cinquième satellite, la longue ligne de base étant négligeble devant la "distance focale" de l'instrument (le dernier satellite est très éloigné des 4 premiers). Pour être efficace, chaque faisceau va recevoir un déphasage précis selon deux configurations (appelées droite et gauche).
Configuration
Signal attendu
Gauche
0°
180°
90°
270°
étoile annulée + disque de poussière gauche + planète gauche
Droite
0°
180°
270°
90°
étoile annulée + disque de poussière droite + planète droite
Simulation Darwin
Simulation d'une observation Darwin de 60 h sur un système solaire à 10 pc de nous.
Crédit :
Bertrand Mennesson
Imagerie différentielle
Présentation
L'idée de base de l'imagerie différentielle est de prendre plusieurs images de l'étoile et de sa planète (ou ses planètes) et de profiter des différences entre les images de ces objets pour les identifier et les distinguer.
Après l'acquisition des données brutes par l'instrument, il faut commencer par les corriger des biais instrumentaux, de la réponse des pixels du capteur CCD, on obtient alors les images dites scientifiques. Il faut ensuite corriger les effets de l'instrument (on appelle cela déconvoluer l'image de l'étoile (selon la PSF, ou Point Spread Function de l'instrument, c'est-à-dire l'étalement d'un point source sur le détecteur). Pour ce faire, plusieurs méthodes sont possibles suivant l'instrument.
ADI
L'imagerie différentielle angulaire (ADI en anglais), va exploiter la rotation des objets sur la voûte céleste, comme vous pouvez le voir sur cette [ animation ].
Les étoiles présentent un déplacement apparent dans le ciel au cours de la nuit suivant des arcs de cercle centrés sur le pôle céleste. En général, un télescope moderne compense cette rotation automatiquement, mais ici nous bloquons cette rotation et suivons seulement le déplacement apparent de l'étoile sans rotation de l'instrument. Cela a pour effet d'appliquer une rotation de l'image de la planète (à ne pas confondre avec la révolution de la planète autour de son étoile) dans le ciel autour de l'axe de rotation de la Terre. Il "suffit" alors de faire la médiane des différentes images pour annuler les signaux non fixes (comme les éventuelles planètes), ce qui revient à ne garder que la PSF de l'étoile (ponctuelle) comme image médiane. Ensuite on soustrait cette PSF de toutes les images scientifiques, puis on applique une rotation de sens opposée à celle observée sur les images de façon à corriger la rotation sur le ciel, et finalement on additionne les images pour faire ressortir les planètes (si il y en a).
ADI
Exemple de ce que permet l'imagerie différentielle angulaire : (a) une des images prise de l'étoile HD 691 avec un coronographe. Les images (b) et (c) sont le résultat de l'ADI appliquée sur deux groupes d'images. (d) est l'image finale qui est la médiane de toute les images résiduelles (comme (b), (c)). Remarquez le point source au-dessus de l'étoile qui était complètement invisible dans l'image (a).
La lumière émise par les étoiles n'est pas polarisée, mais quand celle-ci est diffusée ou réfléchie par des disques ou des planètes elle peut acquérir une polarisation LIEN VERS GRAIN POLARISATION. Forts de ce constat, nous pouvons prendre deux images acquises avec deux polariseurs dans des directions perpendiculaires. L'étoile apparaît inchangée, tandis que les sources secondaire par réflexion ou diffusions présenteront des différences. On peut dont soustraire l'une des images à l'autre pour ne garder que les disques et les planètes proches.
Imagerie différentielle spectrale
Les planètes et les étoiles émettent des spectres caractéristiques, comportant des raies spectrales diverses selon la physico-chimie de ces objets (température, gravité, composition). Dans certaines bandes de longueurs d'onde, seul l'un des deux types de corps possède des absorbants : c'est par exemple le cas du méthane pour les planètes (du moins celles assez froides pour que des molécules puissent exister dans leurs atmosphères). Les tavelures, quant à elles, apparaissent à une distance angulaire proportionnelle à la longueur d'onde. L'imagerie différentielle spectrale (SDI en anglais) part du principe que l'on acquiert plusieurs images, simultanément, dans plusieurs bandes de longueurs d'onde judicieusement choisies. On ajuste ensuite leur échelle relative afin de pouvoir identifier et de retirer les tavelures. Ceci nous permet d'exploiter les différences entre étoiles et planètes pour extraire des informations sur ces dernières.
Spectroscopie
Pésentation
Acquérir une image de la planète, dans différentes bandes spectrales, permet d'obtenir quelques informations sur celle-ci. Mais ces informations sont dégénérées, c'est-à-dire que plusieurs jeux de paramètres physiques vont pouvoir correspondre aux différentes images observées. Ces dégénérescences peuvent être en partie levées si l'on obtient un véritable spectre de la planète (avec une résolution spectrale suffisante), ce qui explique pouquoi les instruments qui sont mis en service depuis 2013 (SPHERE, GPI, Project 1640, etc.) soient conçus pour en obtenir.
Acquisition
Pour ce faire, ces instruments comportent un IFS (Integral Field Spectrograph), qui va disperser spectralement la lumière censée arriver sur chaque pixel.
Ainsi, au lieu d'avoir une image en deux dimensions comme pour l'imagerie pure, on obtient un cube spectral (une image en 3 dimensions) : les deux coordonnées de position sur la grille des pixels et la troisième coordonée selon la longueur d'onde observée. Une coupe du cube selon les dimensions horizontales donnera une image à la longueur d'onde de la "tranche" choisie, tandis qu'une ligne à position spatiale donnée suivant la dimension spectrale donnera le spectre observé en ce point de l'image. L'observable brut obtenu est donc un cube correspondant au flux reçu par le capteur CCD en fonction de la position du pixel et de la longueur d'onde.
Exemple de cube
Succession temporelle de différentes "tranches spectrales" correspondant aux différentes longueurs d'onde d'un cube spectral (les abscisses et les ordonnées correspondent aux coordonnées spatiales des pixels). Remarquez que le spectre de la planète (le point qui apparaît en bas à gauche à la moitié de l'animation) n'apparaît que à certaines longueurs d'ondes à une position spatiale donnée, alors que les autres éléments (artefacts, tavelures) s'éloignent en fonction de la longueur d'onde.
Il faut retirer des cubes spectraux les artefacts lumineux provenant de l'étoile et les tavelures pour pouvoir localiser les éventuelles planètes.
Déconvolution spectrale
Les artefacts proviennent des phénomènes d'interférence et de diffraction qui ont lieu le long du chemin optique, leurs positions vont changer proportionnellement à la longueur d'onde. Il est donc possible d'effectuer un changement d'échelle du cube suivant la longueur d'onde pour superposer toutes les images d'une tavelure en fonction de la longueur d'onde (dans ce nouveau cube où toutes les longueurs d'onde sont ramenées à la même échelle c'est désormais l'image de la planète qui va changer de position suivant la longueur d'onde). Il est alors possible de déterminer la forme exacte des tavelures et artefacts (indépendante de la longueur d'onde dans ce cube mis à l'échelle). On peut alors remettre les tavelures et artefacts seuls à lPuis on cherche quelle est la forme du flux en fonction de la longueur d'onde, et on retire les pixels
où elle apparaît.
Enfin on change à nouveau l'échelle du cube à sa valeur initiale pour toutes les longueurs d'onde.
1. En décomposant un cube d'observation acquis par un IFS, on observe sur chaque tranche la planète (disque en bas à gauche de l'étoile jaune) noyée dans des tavelures (nuage rouge). La position d'un tavelure par rapport au centre va évoluer proportionnelement à la longueur d'onde. La position de la planète reste fixe.
2. Si on change l'échelle de chaque tranche en contractant chaque image proportionnelement à la longueur d'onde, les tavelures seront à position fixée d'une tranche à l'autre. C'est en revanche la planète qui va maintenant changer de position en fonction de la longueur d'onde.
3. Si on calcule la médiane des images fabriquées à l'étape n°2, on va obtenir une image comportant les tavelures mais pas la planète car la position de la planète n'est pas la même sur toutes les images.
4. On peut alors effectuer une transformation d'échelle inverse de celle effectuée à l'étape n°2 pour obtenir la position des tavelures seules à chaque longueur d'onde.
5. On soustrait ces nouvelles images aux observations.
6. Il ne reste plus alors que l'image de la planète à chaque longueur d'onde.
Extraction du spectre
Dans ce cube, débarrassé des tavelures, on peut maintenant chercher les spectre d'une ou plusieurs planètes.
Pour faire cela on effectue une corrélation croisée avec un jeu de spectres synthétiques sur chaque pixel et on se concentre sur les meilleurs coefficients de corrélations.
On extrait ensuite le spectre de la planète identifié si elle existe.
Restrictions sur la séparation observable
On a déjà vu qu'il fallait une séparation angulaire minimale pour pouvoir imager une planète, du fait de la proximité de l'étoile bien plus brillante. En pratique, pour les instruments modernes, cette séparation minimale est de l'ordre du dixième de seconde d'arc. Attention cependant, la zone du capteur CCD où l'optique adaptative est efficace est restreinte à une petite partie du champ de vue. Les techniques de recherche d'objets se focalisent ainsi sur une zone restreinte... Pour l'instrument SPHERE, par exemple, on peut considérer que l'on recherche des planètes entre 0,1" et 3". Les planètes trop loin de leur étoile hôte sont donc difficiles à imager !
Confirmation
Auteur: JLB
Deux époques
Avoir une cible qui se comporte lors d'une observation comme une exoplanète ne suffit pas à annoncer la découverte d'une exoplanète. On recense avec le satellite Kepler 4234 candidats, en juillet 2014, et (seulement ?) 977 exoplanètes confirmées. Dans le cas de l'imagerie directe, une première détection ne suffit pas à annoncer la découverte d'une exoplanète, il en faut au moins deux pour prouver que l'objet en question est lié gravitationnellement
à une étoile, et cela permet de se faire une idée de l'orbite de l'objet. Le problème étant que les planètes détectées en imagerie directe sont éloignées de leurs étoiles et donc ont un mouvement autour de leur étoile très lent, il faut attendre plusieurs mois voire années pour obtenir des positions significativement différentes !
En effet, la source lumineuse que l'on observe à côté de l'étoile (un possible candidat planétaire), peut, en définitive, se révéler être une étoile située plus loin sur la ligne de visée (une étoile de champ), ou bien une zone plus dense que la moyenne dans le disque autour de l'étoile. En imagerie directe il faut au moins deux observations de l'objet, avec des images différentes, cohérentes avec une orbite képlérienne et un masse minimale inférieure à 13 masses de Jupiter, pour confirmer la présence d'une exoplanète. On peut alors déclarer la détection d'un objet lié à l'étoile et de masse planétaire (au dessus de 13 masses de Jupiter on entre dans le domaine des naines brunes).
Une planète tournant autour d'une étoile
Gaël Chauvin et collaborateurs dans un article de 2012 de Astronomy and Astrophysics présente une étude de l'orbite de β Pictoris b
Ici nous avons une compilation de huit observations qui montre bien que l'objet tourne autour de l'étoile. Remarquez la différence de date et de position entre les point 1 et 2 : en 2003 les chercheurs ont découvert un objet proche de l'étoile mais ils ont dû attendre 2009 pour avoir la preuve que c'était bien une planète.
Autres méthodes
Une autre grande inconnue laissée par l'imagerie directe est la masse de la planète, paramètre essentiel qui va déterminer si l'objet est une planète ou une naine brune ! Or, si l'on se restreint à l'imagerie
directe, seule l'utilisation de modèles plus ou moins bien contraints permettent d'en estimer une.
Représentation de la modification du spectre d'une étoile, décalé vers le bleu ou vers le rouge, suivant que la planète s'éloigne ou s'approche de nous, c'est ce décalage qui est utilisé par la méthode de vélocimétrie radiale.
Une mesure, indirecte, en vitesse radiale ou en astrométrie, si celles-ci sont possibles, permettraient de contraindre la masse de la cible ainsi que sa période de révolution autour de l'étoile..
Crédit :
Évolution de la position d'une étoile dans le ciel, les petits écarts (au chemin en pointillés) viennent de la présence d'un planète, ce sont ces écart que recherche l'astrométrie pour les exoplanètes.
Michael Perryman,arxiv:1209.3563
C'est autour de l'étoile Fomalhaut que se trouve un objet, peut-être encore sujet à controverse.
En effet dans le disque d'accrétion de cette étoile, on a annoncé avoir trouvé dans des images visibles du HST
une planète.
Mais les images prises par Spitzer en infrarouge ne montrent rien ! Pour les défenseurs de la
"découverte", c'est que la planète est trop petite pour être vue par Spitzer. Pour les détracteurs de cette "découverte"
un objet vu en visible mais pas en infrarouge, ne peut pas être une planète.
Se tester
Auteur: JLB
QCM Lexique
Auteur: JLB
Objets observés
Paramètres
Voici quelques questions sur les paramètres importants à prendre en compte dans l'imagerie directe des exoplanètes :
1)
Pourquoi est-il plus facile de détecter une planète (sans considération sur son âge) plutôt éloignée de son étoile ?
2)
Pour l'imagerie directe, quel est le plus important ?
Cibles
Voici quelques questions sur les cibles de l'imagerie directe :
1)
A priori, une jeune naine M est une cible intéressante, pourquoi ?
2)
Plusieurs exoplanètes ont été imagées autour d'étoiles de type A, pourquoi ?
Atmosphère
Atmosphère
Voici quelques questions sur les effets de l'atmosphère terrestre, et comment on tente de les corriger.
1)
L'atmosphère est très absorbante dans :
2)
Quel effet va avoir l'atmosphère sur les observations dans des gammes de longueurs d'onde où elle est transparente ?
Instruments
Séparer
Hors atmosphère, avec un optique parfaite, il n'est toujours pas simple de séparer les planètes de leurs étoiles. Voici quelques questions sur ces techniques :
1)
Dans le principe du coronographe de Lyot, seul le fait placer un masque unique sur la trajectoire de la lumière par l'étoile est important.
2)
L'imagerie différentielle angulaire (ADI) utilise un mouvement de rotation pour séparer la lumière provenant de l'étoile de la lumière provenant de la planète, lequel ?
3)
L'imagerie différentielle spectrale utilise des bandes spectrales calibrées pour profiter des raies d'absorptions de l'étoile et ainsi pouvoir retirer la lumière de de celle-ci.
Corriger
Au sol, nous devons corriger les effets de l'atmosphère terrestre et le fait que l'optique n'est pas parfaite. Voici quelques questions sur la correction de ces effets:
1)
Qu'est-ce qu'une tavelure (speckle) ?
2)
Comment fonctionne l'optique adaptative ?
Exercices
Auteur: JLB
Astronomie
Astronomie
L'une des données les plus importantes pour l'imagerie directe d'exoplanète est l'angle sur le ciel entre la planète et son étoile, les questions qui suivent vont vous permettre de comprendre les liens entre la dynamique du système observé et cette importante observable.
51 Peg b est la première exoplanète découverte autour d'une étoile de type solaire, elle a été découverte par la méthode des vitesses radiales.
Elle est en orbite à 52 millièmes d'unités astronomiques autour de l'étoile 51 Peg, qui se situe à 14,7 parsec de nous.
Quel est l'ordre de grandeur de la séparation angulaire entre la planète de son étoile ?
Donner un angle, en seconde d'arc, correspondant au rapport trigonométrique entre la taille de l'orbite et la distance nous séparant de l'objet.
Question 2)
Corot 7 b est une planète de type super-Terre, d'un rayon inférieur à 2 fois le rayon terrestre, découverte par le satellite du CNES CoRot grâce à la technique des transits.
Elle est en orbite à 17 millièmes d'unités astronomiques autour de l'étoile Corot 7, qui se situe à 150 parsec de nous.
Quel est l'ordre de grandeur de la séparation angulaire entre la planète de son étoile ?
Donner un angle, en seconde d'arc, correspondant au rapport trigonométrique entre la taille de l'orbite et la distance nous séparant de l'objet.
Question 3)
2M1207 b est la première planète imagée, autour d'une naine brune.
Elle est en orbite à 46 unités astronomiques autour de la naine brune 2M1207 qui se situe à 52 parsec de nous.
Quel est l'ordre de grandeur de la séparation angulaire entre la planète de son étoile ?
Donner un angle, en seconde d'arc, correspondant au rapport trigonométrique entre la taille de l'orbite et la distance nous séparant de l'objet.
Question 4)
Les deux premières questions de cette page portent sur des planètes découvertes par les techniques des vitesses radiales et par celle des transits.
Au vu des résultats que vous avez obtenu, pensez-vous qu'il soit possible d'imager facilement ces deux planètes ?
Comparer la séparation angulaire des trois objets.
Détectabilité
Détectabilité
Pouvoir observer un objet va dépendre de plusieurs facteurs.
Question 1)
Pour faire de l'imagerie directe, on utilise soit des instruments au sol, soit des satellites. Ces deux méthodes ont leurs avantages et leurs inconvénients... Quels sont-ils ?
Question 2)
La gamme de longueur d'onde que vous utilisez pour observer est essentielle. Pour observer un planète, il faut que le flux qui en provient soit suffisant en comparaison de celui de son étoile hôte. La sélection du domaine spectral va dépendre de l'âge de la planète, de sa distance à l'étoile et des domaines spectraux accessibles.
Déterminez pour les trois planètes qui suivent, à quelle longueur d'onde se trouve le maximum spectral de leur émission, et calculez leur flux surfacique.
Jupiter, dont la température efficace est de 124 K et qui tourne autour du soleil en 12 ans.
2M1207 b (voir page précédente), dont la température efficace est de 1600 K.
Osiris, de son nom scientifique HD 209458 b, planète découverte et très étudiée par la méthode des transits, avec une température effective de 1130 K et qui tourne en 85 heures autour de son étoile.
Concluez sur la facilité de détecter ces planètes.
Considérez les planètes comme des corps noirs dans leur domaine d'émission thermique.
Visibilité du système solaire depuis AlphaCen b
Auteur: JLB
Présentation
Fin 2012, une planète ressemblant à la Terre et tournant autour de l'étoile α Centauri B (faisant partie du système stellaire le plus proche de nous) a été annoncée. Elle a été découverte par vélocimétrie radiale. [Pour plus d'information cliquez ici]
Imaginons qu'une forme de vie intelligente, au même niveau technologique que nous, y habite et cherche à étudier notre système solaire. Auraient ils la possibilité de détecter la Terre ? Ou au moins Jupiter ? Pour le savoir répondons aux quelques questions des pages suivantes...
Quelques Grandeurs
Masse
Période
Vitesse orbitale
Rayon
Température efficace
Terre
d'après vous ?
30 km/s
Jupiter
soit
à calculer
soit environ
α Cen B a une parallaxe de 796,92 milliarcsecondes.
Quel la distance entre la Terre et le Soleil ? Entre Jupiter et le Soleil ?
Sous quel angle apparent dans le ciel de α Cen Bb observerait-t-on la distance Terre-Soleil ? la distance Jupiter-Soleil ?
Luminosité
Question 1)
Dans quelle gamme de longueur d'onde rechercher ces planètes ?
Quel est le contraste entre la Terre et le soleil, entre Jupiter et le soleil ?
Technique
Question 1)
Si ces extraterrestres ont un petit peu d'avance sur nous et ont à disposition les télescopes au sol que nous prévoyons d'avoir au cours des décennies à venir. Peuvent-ils observer, voire étudier la Terre ou Jupiter ? Si oui est-ce une tache facile ?
Voici les courbes des capacités de détection des instrument actuels (GPI 2013, SPHERE 2014) et futur avec les ELT, télescopes de plus de 20 m de diamètre (TMT,GMT et E-ELT, arrivant après 2020). Si une planète a un contraste avec son étoile, à séparation angulaire donnée, supérieur à la courbe, alors elle est détectable. Ces instruments ciblent le domaine du proche infrarouge (1 à 5 µm) particulièrement les bandes J (1,25 µm), H (1,75 µm) et L (3,75 µm) qui sont des fenêtres de transparence de l'atmosphère terrestre (l'eau absorbe beaucoup dans le proche infrarouge en dehors de ces fenêtres).
Reprendre le graphique de Sara Seager et al. pour étudier le contraste en J, H et L .
Question 2)
Sachant que le contraste entre la lumière zodiacale et la lumière solaire dans le système solaire est de 10-7 entre 5 et plusieurs centaines d'UA, cela change-t-il vos conclusions ?
Mini-projet
Auteur: JLB
Présentation
Ce projet va vous confronter au travail que les astrophysiciens effectuent pour étudier les planètes extra-solaires par la technique de l'imagerie directe.
Jupiter dans le proche infrarouge
Image de β Pictoris b, prise dans les bandes J, H et M'. Vous pouvez remarquer que la magnitude de la planète (au bout de la flèche) varie en fonction de la longueur d'onde.
Pour ce faire, vous allez partir des contrastes photométriques obtenus pour une planète, déterminer les magnitudes de l'objet, et comparer ces caractéristiques à celles des naines brunes. Pourquoi les naines brunes ? Parce que ce sont de objets étudiés de façon similaire aux jeunes exoplanètes géantes et que l'on a beaucoup plus d'observations sur ces étoiles avortées.
Données
Les données qui suivent proviennent d'un article scientifique, et d'observations par imagerie directe coronographique. Le premier tableau donne des informations sur la date des observations, les filtres utilisés (ici J, H, et M') et le contraste entre l'objet et l'étoile, en magnitude.
Observations
Dates :
Filtre
Contraste en magnitude
16/12/2011
J
16/12/2011
J
16/12/2011
J
18/12/2011
H
18/12/2011
H
18/12/2011
H
11/01/2012
H
11/01/2012
H
11/01/2012
H
11/01/2012
H
26/11/2012
M'
26/11/2012
M'
26/11/2012
M'
26/11/2012
M'
Le second tableau, extrait du même article, vous donne des informations sur les caractéristiques de l'étoile.
L'étoile
Paramètres
Valeur
Distance depuis la Terre (pc)
Type spectral
A6V
Température efficace (K)
[8052, 8036]
Luminosité :
Masse (en masse solaire)
Une base de données contenant des informations sur les naines brunes est disponible ici : DwarfArchives
Les observations présentées ici consistent en des contrastes entre la planète et l'étoile. Il vous faut donc utiliser les magnitudes de l'étoile et la distance nous séparant du système pour déterminer les magnitudes de la planète.
Liens entre températures et magnitudes
Pour comparer la température de l'étoile et la planète il est préférable d'utiliser les flux émis par ces deux corps.
Calculer le flux observé pour l'étoile et la planète dans les bandes disponibles.
Tracer les flux émis par l'étoile et de la planète en fonction de la longueur d'onde dans les différentes bandes
Conclure sur la différence de température entre les deux corps.
Diagramme couleur-magnitude
La table suivante réunit des informations sur les naines brunes connues.
Couleur magnitude naines brunes
Construire un diagramme magnitude - couleur des naines brunes en utilisant l'application et en choisissant judicieusement les bandes spectrales. Placer la planète dans la diagramme.
Comparaison exoplanète-naines brunes
En comparant les types spectraux (L, T) des naines brunes et leur position dans le diagramme, conclure sur le type spectral de la planète.
L'observation directe d'exoplanètes est délicate à cause du grand contraste entre l'étoile et la planète. La plupart des détections sont faites en utilisant un effet de la planète sur l'étoile. Par exemple, la technique des transits consiste à mesurer une baisse de luminosité reçue, éventuellement due à une planète passant devant l'étoile observée.
Les techniques d'observations dont il est question dans ce cours reposent sur un principe simple: si des planètes orbitent autour d'une étoile, alors celle-ci aura un mouvement dépendant des planètes. En l'analysant, on infère la présence ou non de planètes et si oui, leurs orbites.
En effet, en astrométrie on mesure les variations de position angulaire de l'étoile et la détection par vitesse radiale consiste à mesurer la vitesse de l'étoile sur la ligne de visée. Le phénomène physique exploité et la réduction des données est similaire, c'est pourquoi ces deux méthodes seront présentées conjointement. Ce cours a deux objectifs:
Donner une vue d'ensemble de la détection, pour en comprendre les enjeux scientifiques et techniques
Donner les outils pour réaliser un code informatique simple d'analyse de données.
On présentera un modèle d'observations "sans bruit" relativement réaliste, les principales sources d'incertitude, le principe des instruments utilisés et des éléments de traitement de données.
Prérequis
Bases d'algèbre linéaire (opérations sur les matrices, produit scalaire, produit vectoriel) pour la modélisation et l'analyse des données
Notions de base d'optique ondulatoire (intensité lumineuse, spectre lumineux, diffraction)
Notions de probabilité (variable aléatoire, espérance, variance), pour l'analyse des données.
Décrire
Auteur: Nathan Hara & Jacques Laskar
Vitesses radiales
Lorsque la distance entre une source d'onde et un observateur varie dans le temps, la longueur d'onde vue par l'observateur varie aussi. Ce phénomène, appelé effet doppler, est ce qui permet la détection du mouvement radial de l'étoile. Cet effet est géométrique, et présent pour tous les types d'ondes. Un exemple bien connu est celui de la sirène d'ambulance: le son qu'elle émet a l'air plus grave une fois qu'elle est passée devant nous. Pour le comprendre, considérons une personne qui se baigne sur une plage (suffisament loin pour que les vagues se brisent derrière elle). Si elle reste statique les vagues vont l'atteindre avec une certaine période. Selon qu'elle s'avance vers le large ou revient vers la plage elle rencontrera les vagues plus fréquemment ou moins fréquemment. De la même manière, plus vite l'étoile s'avance vers la Terre, plus la lumière reçue est décalée vers les hautes fréquences.
L'énergie par longueur d'onde d'une source lumineuse, ou de manière équivalente, le nombre de photons reçus par longueur d'onde, est appelé le spectre de cette source. Cette définition fait intervenir une mesure, le spectre dépend donc de l'observateur. La lumière provenant d'une étoile est composée à priori d'une infinité de longueurs d'ondes. Certaines d'entre elles sont absorbées par l'atmosphère de l'étoile, de sorte qu'elles sont absentes du spectre mesuré. On parle de raies d'absorption. Le spectre d'une étoile a un aspect proche de la figure 1. Si la source lumineuse et l'observateur sont immobiles l'un par rapport à l'autre, l'observateur verra un certain profil spectral (intensité par longueur d'onde . Si maintenant la source et l'observateur ont une vitesse relative au temps , l'observateur verra un spectre décalé avec où est la vitesse de la lumière, dans l'hypothèse où est très petit par rapport à . En mesurant on peut remonter à . La présence d'une planète autour d'une étoile engendre un mouvement périodique de celle-ci, donc un décalage périodique du spectre (voir figure 2).
La mesure du décalage du spectre est utilisée depuis la fin du XIXe siècle pour détecter des étoiles binaires. La vitesse de l'étoile dont on observe le spectre (étoile cible) diminue avec le rapport de masse du compagnon et de l'étoile cible. Plus faible est la masse du compagnon plus il est difficile de le détecter. Les techniques ont été perfectionnées pour détecter des compagnons de masses de plus en plus faible.
Remarque: Une des limitations des mesures de vitesse radiale est qu'on ne mesure qu'une masse minimale car on mesure la projection du mouvement selon une direction. En notant l'angle entre la ligne de visée et le plan orbital d'un objet de masse , on mesure .
En 1989, Latham trouve un objet d'une masse minimale de 11 masses de Jupiter (notée ) en orbite autour d'une étoile de type solaire. Etant
donné que la limite admise à la masse d'une planète (au delà de laquelle le deutérium entre en fusion) est de 13 , la conclusion de l'article est encore valide: il est possible que ce compagnon soit une Naine brune ou une super Jupiter, selon la valeur de . La première planète confirmée comme telle est découverte en 1995 par Michel Mayor et Didier Queloz à l'observatoire de Haute Provence.
Pour donner une idée des ordres de grandeur considérées, la Terre engendre un déplacement du Soleil d'environ 9 cm/s, Jupiter de 12.5 m/s. Un déplacement d'1 m par seconde correspond à un décalage relatif de longueurs d'onde . La précision attendue doit être maintenue sur plusieurs mois, voire plusieurs années.
Spectre du Soleil dans le visible
Représentation de la lumière du Soleil diffractée dans le visible. Pour une exploration plus précise du spectre du Soleil, voir cette page.
Crédit :
Observatoire de Paris
Décalage du spectre
L'étoile et la planète orbitent autour de leur centre de gravité. L'observateur (représenté par une lunette) voit le spectre reçu se décaler et en infère la vitesse V de l'étoile au cours du temps.
Crédit :
Observatoire de Paris, ASM, E. Pécontal
Astrométrie
L'astrométrie désigne la mesure de la position des astres. Chronologiquement, l'astrométrie peut être considérée comme la première discipline de l'astronomie. Les anciens s'étaient déjà aperçus que certains astres semblent mobiles: les planètes, mais l'observation à l'oeil nu et avec les premiers instruments astronomiques sont trop imprécises pour détecter le mouvement des étoiles. Ils pensaient donc qu'elles sont fixes, mais ce n'est pas du tout le cas.
Plus précisément, on mesure la position des astres sur la Sphère céleste: Il s'agit d'une manière d'appeler l'ensemble des coordonnées angulaires d'un système de coordonnées sphériques. Selon le contexte, le centre de centre de ce repère est le barycentre du système solaire ou celui de la Terre, l'observateur, ou un autre point. Les directions du repère fixe peuvent être définies par rapport à des étoiles très lointaines (quasars), ou l'intersection du plan de l'orbite de la Terre (l'ecliptique) et de l'équateur.
Les observations doivent être exprimées dans un même système de référence. En l'occurrence, le repère fixe choisi est le référentiel barycentrique du système solaire qui est un référentiel galiléen. De ce fait, on peut modéliser simplement la trajectoire de l'étoile dans ce référentiel. Si l'étoile a des compagnons planétaires, le mouvement dû aux planètes projeté aura l'aspect d'ellipses imbriquées les unes dans les autres (voire figure). Le mouvement rectiligne uniforme a une amplitude bien supérieure au mouvement dû aux planètes, il n'est pas représenté sur la figure pour cette raison.
Une mesure astrométrique comporte toujours plusieurs étoiles dans le champ, de sorte que l'on peut mesurer le déplacement de l'étoile cible par rapport aux étoiles du champ. Ce qui nous intéresse est en effet un mouvement différentiel (on compare les mesures les unes aux autres, on ne cherche pas une position absolue). Un mouvement global des étoiles du champ provient des turbulences atmosphériques ou de bruits instrumentaux, qui peuvent être corrigés.
En mars 2015, deux planètes on été découvertes par astrométrie (DE0823-49 b et HD 176051 b). La résolution nécessaire à la détection de planètes est difficilement atteignable à cause des perturbations atmosphériques. Pour les corriger, il est possible d'utiliser une technique appelée astrométrie différentielle. Sa présentation sort du cadre de ce cours. Il est probable que la mission astrométrique spatiale GAIA, dont la précision est de l'ordre de 20 μas permettra de faire de nombreuses découvertes.
Les mouvements de l'étoile autour du centre de gravité du système planétaire sont de l'ordre du rayon de l'étoile en général. Par exemple, le mouvement de Jupiter entraine un mouvement quasi circulaire du Soleil dont le rayon est environ 1.06 rayon solaire.
L'ordre de grandeur du déplacement observé dépend de la distance de l'étoile, des masses de l'étoile et de la planète et du demi-grand axe de l'orbite.
ordres de grandeur
Type de planète
Distance à l'étoile
Amplitude du mouvement
Jupiter
10 parsec
500 µas
100 parsec
50 µas
Terre
10 parsec
0.3 µas
100 parsec
0.03 µas
Projection du mouvement de deux planètes sur la sphère céleste
Observations idéales (sans bruit, mouvement de l'étoile uniquement dû aux planètes) d'un système à deux planètes sur cinq ans. En bleu on représente tout le parcours de la planète et en rouge les quarante-cinq mesures de position.
Exercices
Auteur: Nathan Hara
Questions générales
Difficulté : ☆
Question 1)
Pourquoi peut-on dire que la vitesse radiale et l'astrométrie se basent sur des effets dynamiques ?
Le système étoile + planètes tourne autour de son centre de masse (ou centre de gravité). Si une seule planète de masse orbite autour d'une étoile de masse à une distance de que vaut la distance de l'étoile à , notée ? Que pensez vous de l'affirmation: "à orbite fixée, plus une planète est massive plus elle est facile à détecter" ?
Auteur: Nathan Hara
Vitesses radiales
Difficulté : ☆
Question 1)
L'effet Doppler existe-t-il seulement pour la lumière ou pour tous les types d'ondes ?
Est-il dû au déplacement de la source, du receveur, ou à leur vitesse relative ?
Auteur: Nathan Hara
Astrométrie
Difficulté : ☆
Question 1)
Une seconde d'arc est égale à un degré divisé par 3600. Une micro seconde d'arc (µas) est un millionième d'une seconde d'arc.
Exprimer une micro seconde d'arc en radians
On considère un bâton de jonglage à extrémités enflammées de 50cm. A quelle distance doit se trouver le jongleur pour que les deux extrémités apparaissent à une une microseconde d'arc l'une de l'autre dans notre champ de vision ? Comparer avec les ordres de grandeurs des mouvements donnés page précédente.
1 µas =
Si est en radian , le jongleur doit se trouver à m = 19 UA, soit environ la distance Terre-Uranus.
Notez que si on observait uniquement l'effet de la planète si petit soit-il, on aurait toujours accès à toute l'information. Malheureusement, de nombreuses autre sources perturbent le signal, comme on va le voir dans les pages suivantes.
Que mesure-t-on ?
Le principe de ces techniques de détection est simple, mais pour obtenir la précision désirée il faut prendre en compte une grande quantité d'effets affectant les observations. Les mesures sont issues in fine de capteurs CCD, situés au plan focal d'un télescope ou en sortie d'un spectrographe, respectivement dans les cas de l'astrométrie et de la mesure de vitesses radiales. Ces capteurs fonctionnent par effet photoélectrique: lorsqu'un photon les percute, un électron est émis (si le photon a une énergie supérieure à une certaine limite). Ils sont exposés à la lumière pendant un certain temps appelé temps d'intégration. Le nombre d'électrons reçus pendant ce temps est ensuite compté pixel par pixel. Finalement, on obtient un tableau de nombre: le nombre de photons reçus par pixel de la caméra CCD. A chaque mesure est attachée une erreur, calculée selon une méthode explicitée par l'observateur. On effectue ensuite une série d'opérations mathématiques sur les mesures obtenues pour en extraire l'information souhaitée.
Avant d'arriver sur ces capteurs, les photons passent par les instruments, par l'atmosphère, par le milieu interstellaire. De plus, le mécanisme d'émission des photons par les étoiles est complexe: même si l'étoile était fixe par rapport à l'observateur, son spectre et sa position sembleraient variables. Comme les instruments ne permettent pas de résoudre angulairement l'étoile (elle n'apparait que sur un pixel), on mesure la lumière moyenne de sa photosphère, c'est à dire la fine partie de son enveloppe dont la lumière nous parvient. L'astrométrie est sensible à son photocentre. Enfin, il est possible que la lumière reçue provienne partiellement d'une autre source céleste située à proximité de l'étoile, ou du Soleil.
Chacune de ces étapes affecte le signal reçu, de sorte que l'information recherchée n'en représente qu'une petite partie. Par exemple, la vitese radiale apparente d'une étoile est de l'ordre de quelques dizaines de km/s, les techniques actuelles permettent de réduire le bruit instrumental à un peu moins de 0.3-0.5 m/s, qui est aussi l'ordre de grandeur de l'erreur due à une étoile de type solaire. Le signal d'une planète tellurique est de l'ordre de 0.5 m/s, c'est à dire moins que l'ordre de grandeur du bruit.
Pour chercher des signaux de plus en plus faibles, il faut améliorer à la fois la modélisation du signal, des instruments, et des méthodes de traitement de données.
Représentation du trajet de la lumière
En mauve, les sources de lumière et en bleu les milieux traversés.
Signal et bruit
Idéalement, on voudrait directement avoir accès aux orbites et aux masses exactes des planètes autour d'une étoile donnée. C'est jusqu'à présent impossible, et probablement pour longtemps ! Les techniques dont il est question ici visent à mesurer la position ou la vitesse de l'étoile, ce sont lessignaux recherchés. Cependant, comme on l'a vu page précédente, la quantité effectivement mesurée contient non seulement le signal mais aussi de nombreux processus aléatoires qu'on appelle bruits. Notre problématique est d'extraire les paramètres du signal (les paramètres des orbites) dans des mesures entachées de bruits.
Pour savoir si un signal sera détectable à priori, on calcule le rapport signal sur bruit qui est le rapport de "la puissance du signal" sur "la puissance du bruit". Ce rapport est fondamental. Le sens précis de cette expression varie selon le contexte mais typiquement, si un signal et un bruit forment une mesure , le rapport signal sur bruit est . Plus ce rapport est grand, plus la mesure est précise.
Supposons que l'on veuille estimer une variation de position angulaire ou de vitesse (resp. et ) d'une étoile de type solaire à 10 parsec autour de laquelle une planète de type jupiter orbite. On a et Les mesures sont contaminées par des variations aléatoires d'amplitudes as (précision de la mission Gaia, mission astrométrique la plus précise) et m/s (ordre de grandeur pour les meilleurs spectrographes actuels) . Le rapport signal sur bruit est de l'ordre de et . La technique par vitesse radiale est pour l'instant plus précise.
Lorsqu'on mesure une quantité modélisée par une variable alétoire (par exemple le nombre de photons reçus pendant une seconde), le rapport signal sur bruit peut être défini comme le rapport de la moyenne et de l'écart-type.
Attention: il ne faut pas confondre l'amplitude d'un effet indésirable et le bruit qui lui est associé. Par exemple, le mouvement de la Terre dans le système solaire induit une vitesse apparente de plusieurs dizaines de km par secondes. Cependant, sa position est connue avec une très bonne précision, de sorte que l'incertitude liée à la soustraction du mouvement de la Terre est de l'ordre d'1 m/s.
Remarque: On distingue en général la précision et l'exactitude. On peut disposer d'un instrument très précis mais comme d'autres effets perturbent la mesure, la mesure donne une valeur inexacte de ce que l'on cherche à mesurer. Dans l'exemple précédent, si on ne soustrait pas la vitesse de la Terre, l'instrument peut être aussi précis qu'on veut on aura un signal parasite entre 1000 et 60000 fois plus gros que celui qu'on cherche à mesurer.
Un problème d'estimation
La problématique de la détection par vitesse radiale et astrométrie est la suivante: quelles sont les orbites et les masses des planètes compagnons de l'étoile cible ? Comme les mesures sont entachées de bruit, on ne peut pas donner des paramètres orbitaux exacts. On estime aussi la "confiance" dans les valeurs des paramètres, souvent donnée sous forme de probabilités. On est aussi amené à se demander si toutes les planètes ont été détectées, et si les détections annoncées sont vraisemblables. En particulier, on étudie la stabilité du système trouvé.
La détection de planètes extrasolaires, comme d'autres problématiques de détection peut être subdivisé comme suit:
Le problème direct, ou modélisation,Notre problème est bien plus complexe que celui de la page précédente. On ne cherche pas à estimer un paramère à partir d'une mesure , mais un vecteur de paramètre à partir de plusieurs mesures aux instants , et les mesures dépendent de ces paramètres et des instants d'observations par une fonction : on a , où est une variable aléatoire suivant une certaine loi de probabilité qui modélise l'incertitude. Le problème direct est la construction de la fonction . En l'occurrence, on utilise les équations bien connues de la mécanique céleste. "Si des planètes avec des paramètres orbitaux connus orbitent autour d'une étoile de masse connue observée à des instants connus, alors les observations seront ".Une première approche est présentée dans la section 1 de la partie "comprendre"
Le problème inverse: étant donné des observations aux instants , =1.. et un modèle (éventuellement un bruit ε), quels sont les paramètres ? C'est le problème de la réduction des données expérimentales, qui est l'objet de la section 3 de la partie "comprendre".
L'instrumentation: Comment construire des instruments performants et modéliser leurs mesures ? La prise en compte des bruits instrumentaux fait partie du modèle.
L'interprétation des résultats: Une fois que les paramètres orbitaux pour plusieurs systèmes planétaires ont été estimés (ainsi que l'incertitude associée), on peut se demander ce que ces résultats signifient Il existe dans le cas des exoplanètes une littérature abondante donnant des scénarios de formation planétaire expliquant les valeurs prises par un système donnée, ou la distribution des éléments orbitaux observés.
Ce cours se focalisera sur les trois premières problématiques, car la quatrième est transverse à toutes les techniques d'observation et fait l'objet d'un cours à part entière.
Exercices
Modélisation
Difficulté : ☆
Question 1)
Quelles sont les précisions annoncées des spectrographes européens ELODIE, HARPS et de celui à venir ESPRESSO ?
Les observateurs attendent que le Soleil soit couché depuis plusieurs dizaines de minutes avant de commencer leurs observations, pourquoi ?
Quel désavantages a-t-on à observer une étoile proche de la Lune ?
Pourquoi observer en altitude ?
Effets à prendre en compte
Les observations traitées sont des mesures de position sur le plan focal d'un télescope et des mesures de spectres lumineux; respectivement pour l'astrométrie et les vitesses radiales. Faire l'hypothèse que les mesures ne sont que le résultat du mouvement d'une étoile parfaitement homogène donnerait des résultats invraisemblables. La fonction de la page précédente prend en général en compte plusieurs effets présentés ici. Compte tenu du format du cours, seuls certains d'entre eux seront développés dans la suite.
Bruit de photon: il s'agit d'un bruit dû à la quantification de la lumière. Les photons sont émis aléatoirement selon ce qu'on appelle un "flux poissonien". Si un détecteur observe une source émettant en moyenne photons sur un certain intervalle de temps , le nombre de détections pendant sera une variable aléatoire de moyenne et de variance . Cette notion est expliquée plus en détail page bruit de photon
Bruit instrumental: les instruments se comportent en pratique différemment de leurs idéalisation de manière imprévisible. Le miroir du télescope est sensible aux variations de température, l'utilisation d'équipement électronique induit du bruit grenaille (similaire au bruit de photon) et du bruit thermique. Il s'agit de toutes les erreurs dues au trajet de la lumière depuis l'entrée du télescope jusqu'à la lecture du détecteur CCD. Ce bruit peut être déterminé par étalonnage.
Les bruits stellaires: A chaque longueur d'onde , on observe le flux lumineux provenant de toute la partie visible de l'étoile. D'un point de vue mathématique, est intégré sur toute le disque visible de la photosphère de l'étoile: . Au rayon et à l'angle , dépend de la température, de la composition et de la vitesse de la matière par rapport à l'observateur en . est un facteur variant selon les modèles dits de "limb darkening". On peut modéliser des propriétés des variations du flux à une longueur d'onde donnée avec un modèle physique de l'étoile.
En pratique, on prend en compte trois types d'effets en compte:
les oscillations acoustiques (p-modes): la propagation d'ondes mécaniques dans la couche extérieure de l'étoile provoque une contraction/dilatation radiale, qui a une signature de quelques centimètres par seconde dans les données de vitesses radiales (cette vidéo montre une simulation des ondes mécaniques au sein d'une étoile).
les tâches dues à l'activité magnétique: Le champ magnétique à la surface de l'étoile peut "piéger" localement du plasma, qui se refroidit et devient donc moins lumineux. Ce phénomène a des effets à court terme: une tache présente sur un des côtés de l'étoile brise la symétrie entre la partie "rouge" et la partie "bleue" (voir figure). D'autre part, sur une période d'observation le nombre de taches peut varier de zéro à plusieurs centaines. Lorsque la convection est inhibée par le champ magnétique l'étoile apparaît plus froide, globalement décalée vers le rouge.
La granulation: la surface de l'étoile étant plus froide que son centre, du gaz chaud remonte à la surface, se refroidit en émettant de la lumière puis redescend. Ce phénomène de convection crée des inhomogénéités de luminosité sur la suface de l'étoile dont la somme donne une vitesse radiale apparente, ou un déplacement du photocentre.
Selon le type d'étoile, ces bruits sont d'importances variables. Certaines étoiles sont trop actives pour avoir une chance de détecter une planète de masse tellurique.
Intensité globale
L'intensité dépend de la composition, de la température et de la vitesse en chaque point du disque apparent de l'étoile
Effet de la rotation de l'étoile sur le spectre
La lumière provenant de la moitié de l'étoile ayant un mouvement vers l'observateur est décalé vers les hautes fréquences (vers le bleu). L'autre moitié est décalée vers les basses fréquences (vers le rouge). Dans l'hypothèse où l'étoile est sphérique, et a une luminosité identique partout sur sa surface, le décalage vers le rouge et celui vers le bleu ne fait qu'élargir les raies spectrales. Si une tache est présente, ici sur la partie bleue, la symétrie est brisée et le déficit de lumière entraine un décalage du spectre vers le rouge.
Effets à prendre en compte (2)
Contamination du fond: à cause de la diffraction, il est impossible d'observer un point du ciel, observe toujours le flux moyen d'une certaine région du ciel. Ce flux ne provient pas nécessairement uniquement de l'objet observé. Cette prise en compte est particulièrement importante lorsque l'étoile est dans un système binaire. En effet, Comme un compagnon planétaire, l'autre étoile engendre un mouvement elliptique de l'étoile cible de plus grande amplitude que celui provoqué par une planète. De plus, si la séparation angulaire entre les deux étoiles est plus petite que le champs de vue, la lumière provenant de la seconde étoile contamine les observations.
Système multiple: l'étoile cible peut avoir un mouvement dû à la présence d'autres étoiles proches.
Les perturbations atmosphériques: les turbulences de l'atmosphère aux hautes altitudes font que le signal est diffracté aléatoirement.
La parallaxe: Le mouvement de l'étoile est modélisé dans un référentiel galiléen dont le référentiel barycentrique du système solaire est une approximation. Cependant, les observations ne sont évidemment pas disponibles depuis le centre du système solaire. Il faut prendre en compte le mouvement de l'observateur, qui se manifeste par un mouvement apparent de l'astre.
Quantifier l'incertitude
Pour pouvoir annoncer qu'une planète a été découverte, il faut avoir une certaine confiance dans le résultat. Cependant, comme on vient de le voir, les mesures sont contaminées par de nombreuses sources qui peuvent être aléatoires. La détection d'exoplanète, comme toutes les problématiques de détection en astronomie, donne l'occasion de présenter des modélisations de phénomènes aléatoires. Introduire ces outils permettra en particulier de définir proprement ce que sont les barres d'erreurs. On donnera un sens à une phrase comme: la période d'une orbite estimée est 100 jours, plus ou moins 10 jours à trois sigmas.
Le cadre mathématique utilisé pour les prendre en compte est la théorie des statistiques. Les quantités physiques dont le comportement est imprévisible sont modélisées par des variables aléatoires qui prennent une certaine valeur à chaque mesure. Etant donné que cette notion intervient dans:
La modélisation des variations de luminosité de l'étoile
La modélisation des perturbations atmosphériques
Le calcul de la précision de l'instrument
Le calcul des incertitudes sur les paramètres des orbites estimées
On donnera une description fonctionnelle, permettant de comprendre le cours sans avoir besoin de rentrer dans les détails des statistiques. Le lecteur intéressé pourra se référer à un ouvrage spécialisé, par exemple le cours de Didier Pelat (en libre accès), cité dans la bibliographie.
Une variable alétoire peut être vue comme un programme informatique donnant une valeur réelle à chaque fois qu'on lui demande. La valeur retournée dépendra de la distribution de probabilité de cette variable aléatoire, notée . Par exemple, si on veut modéliser le lancer d'une pièce de monnaie, chaque lancé correspond à une requête au programme qui retournera "face" ou "pile" avec une probabilité 1/2. Dans le cas de distributions continues, prendra une valeur entre et avec une probabilité . La distribution la plus utilisée est la gaussienne (parfois appelée courbe en cloche), elle vérifie où est sa moyenne et est sa variance. L'analyse des données repose sur l'hypothèse que nous observations des réalisations d'une variable aléatoire. Comme si réaliser une expérience consistait à demander à un ordinateur de sortir une valeur (la mesure) avec une certaine loi de probabilité.
Les variables aléatoires ont deux caractéristiques particulièrement importantes: leur moyenne et leur variance, définie respectivement comme et . La racine carére de la variance est appelée l'écart-type. Cette quantité donne "l'écart-typique" à la moyenne des réalisations. Dans la plupart des cas et en particulier dans le cas gaussien, l'écart-type a une interprétation univoque: il quantifie les déviations à la moyenne. Plus il est petit, plus les valeurs éloignées de la moyenne seront improbables. Dans la limite ou l'écart-type tend vers 0, on aura une variable aléatoire certaine, qui prend la valeur avec une probabilité 1. En physique, on manipule souvent des incertitudes, qui sont implicitement modélisées comme des écart-types de variables aléatoires. Si un observateur dit "j'ai mesuré une vitesse radiale de km/s avec une incertitude de km/s", implicitement on suppose qu'il existe une variable aléatoire dont la moyenne correspond à la "vraie" valeur de la vitesse radiale et dont l'écart-type vaut km/s.
Remarque: nous utilisons une terminologie vague, pour des définitions précises voir les références.
Exercices
Auteur: Nathan Hara
Modélisation des vitesses radiales
Difficulté : ☆
Question 1)
Citer des éléments à prendre en compte dans la modélisation des mesures de vitesses radiales ou astrométriques (on ne demande pas une liste très précise, encore moins exhaustive).
Modélisations
Difficulté : ☆☆
Question 1)
La démarche consistant à écrire un problème direct comportant une partie déterministe et une partie aléatoire n'est pas propre à la détection d'exoplanète. En majorité - si ce n'est en totalité - les détections reposent sur la même démarche. Dans chaque item de la liste suivante, on donne un phénomène à observer et un moyen d'observation. Dans chaque cas, lister des effets déterministes et/ou aléatoires à prendre en compte dans le modèle. Par exemple: "Mesurer une tension avec un voltmètre" peut se modéliser par , où est la tension mesurée, la tension vraie et un bruit gaussien dû aux fluctuations intrinsèques de la tension et aux erreurs de mesure. On peut aussi supposer que le voltmètre réalise en réalité une moyenne de tensions sur un certain intervalle de temps.
Un lancé de dé
Le point d'impact d'un tir ballistique (projectile sans système de propulsion propre) mesuré au gps
Des tendances de ventes de vêtement dans un magasin à partir du livre des comptes tenu par un employé
La mesure de position des corps du système solaire (attention ils ne peuvent pas être modélisés par des sources ponctuelles).
Comprendre
Auteur: Nathan Hara & Jacques Laskar
Modélisation - Problème direct
Présentation du modèle
Dans cette section on répond à la question suivante: pour un système planétaire donné, quelles seront les observations ? Dans la section précédente on a introduit la fonction , où désigne un espace de variables aléatoires, qui donne des observations en fonction d'instants d'observation , d'erreurs alétoires et de paramètre du modèle incluant masse de la planète, de l'étoile, paramètres de l'orbites, etc. qui seront précisés. En l'occurrence, l'erreur est bien représentée par un "bruit additif", c'est à dire les observations sont de la forme , où désigne une fonction modélisant la physique du phénomène observée, celle qui donnerait les observations "parfaites", sans aucune source d'erreur aléatoire. L'erreur modélise tous les phénomènes aléatoires intervenant dans les mesures. Selon la distinction adoptée ici, les paramètres du modèle peuvent inclure une source indésirable mais non aléatoire.
L'objet de ce chapitre est de construire cette fonction avec une modélisation physique. La modélisation la plus précise, utilisant tout ce que l'on sait de la physique serait ici inutilement complexe, car compte tenu des erreurs de mesures la différence avec certains modèles plus simples serait si faible qu'il serait impossible de la détecter avec un niveau de confiance acceptable. Le niveau de précision du modèle présenté ici est couramment utilisé par les observateurs.
Remarque: En pratique, les algorithmes d'estimation de paramètres sont des algorithmes d'optimisation, qui nécessitent tous de donner un ou plusieurs points de départs pour la recherche. Lorsque des modèles plus complexes sont utilisés, les estimations précises peuvent être utilisées comme tels.
On présentera d'abord une modélisation physique de l'objet étudié, puis d'autres effets physiques à prendre en compte. Les bruits instrumentaux seront traités dans le chapitre suivant. Les effets physiques "indépendants de l'observateur" qui seront pris en compte sont:
Le mouvement de l'étoile dû aux planètes.
Le mouvement propre: mouvement de translation du barycentre du système {Etoile+Planètes}
Des effets stellaires variables (Ondes de pression, granularité, activité)
Ensuite, on modélise "comment" la lumière émise par l'étoile nous parvient, ce qui amènera à présenter:
La prise en compte du mouvement de la Terre (vitesse de celle-ci dans le référentiel barycentrique du système solaire pour les vitesses radiales, parallaxe et réduction des observations en astrométrie.
Les perturbations atmosphériques
Les variations de parallaxe et de mouvement propre.
Problème à deux corps
Auteur: Nathan Hara & Jacques Laskar
Problème à deux corps newtonien
Equation de Newton
Les planètes et l'étoile ont un certain volume. Cependant, on peut montrer que lorsque la distance entre deux corps en intéraction gravitationnelle augmente, leur comportement se rapproche de plus en plus de celui de deux points matériels. On néglige aussi les effets relativistes, de sorte que l'on est ramené à la modélisation de l'intéraction de deux points matériels, dont la résolution va suivre.
Considérons deux points matériels (planète) et (pour "star" de sorte à éviter un conflit de notation avec l'anomalie excentrique ) de masses respectives et et l'origine d'un repère Galiléen. Le principe fondamental de la dynamique s'écrit:
où est la constante universelle de gravitation.. En posant et on obtient:
On va montrer que la solution de cette équation décrit une conique plane, une ellipse dans le cas des planètes liées à une étoile. On suppose que le système est isolé, on peut donc choisir comme origine du repère le barycentre du système, ce qui permet d'obtenir facilement et par la relation .
On suppose que le système est isolé, donc le mouvement du barycentre du système {Etoile+planètes} est rectiligne uniforme dans un référentiel galiléen (par exemple le référentiel barycentrique du système solaire).
Quantités conservées
L'équation de Newton est une équation différentielle de degré deux sur des vecteurs de . Pour la résoudre il faut trouver six quantités conservées au cours du mouvement (ou intégrales premières du mouvement) indépendantes. En l'occurrence on peut facilement montrer que deux vecteurs sont conservés au cours du mouvement (ce qui fait deux fois trois composantes, on a bien six scalaires conservés).
Notons , où est un vecteur unitaire (et donc est la norme de ) et la dérivée par rapport au temps d'un vecteur .
On a la conservation du moment cinétique par unité de masse et du vecteur excentricité au cours du mouvement c'est à dire leur dérivée temporelle est nulle
En effet, soit une solution de l'équation de Newton. Alors car d'après l'équation de Newton, est colinéaire à . D'autre part, , or
Donc .
Géométrie de l'orbite
Les quantités conservées définies page précédente permettent de donner une description géométrique de l'évolution de .
On déduit de la conservation du moment cinétique que le mouvement est plan. En effet, et comme est un produit mixte, il est invariant par permutation circulaire: car le produit vectoriel de deux vecteurs colinéaires est nul. Le vecteur est orthogonal à à tout instant, autrement dit le mouvement est dans un plan orthogonal à .
Notons l'angle entre et et posons . Alors comme est unitaire, d'autre part en remplaçant par sa définition, on a et comme est un produit mixte, . où est la norme de . On obtient alors en fonction de :
Où , qui est l'équation polaire d'une conique du plan. Cette équation donne une paramétrisation de la solution en fonction de , appelée anomalie vraie. Cependant, nous voulons exprimer la solution en fonction du temps, l'objet de la page suivante est d'exhiber une relation entre et le temps.
On sait que lorsque , il s'agit de l'équation d'une ellipse. On peut montrer géométriquement que où est le demi-grand axe de l'ellipse. Si ou , la trajectoire est respectivement parabolique ou hyperbolique. Dans ces deux cas le mouvement n'est pas borné, il concernerait une planète en phase d'éjection, événement dont l'observation est très improbable et indiscernable d'une planète à très longue période ou du mouvement propre sur les données actuelles.
L'orbite est dans un plan perpendiculaire à , et le vecteur est parallèle à . Notons et . On introduit un vecteur de sorte que forme une base orthonormale.
Géométrie du mouvement elliptique
Le mouvement est dans le plan
Loi des aires
Nous avons montré que la solution au problème des deux corps est plane, et peut s'exprimer en fonction de l'anomalie vraie , angle entre le vecteur excentricité et le vecteur .
Afin d'exprimer en fonction du temps on va introduire successivement deux variables, et appelées respectivement 'anomalie moyenne et 'anomalie excentrique.
Loi des Aires
Avec les notations précédentes, , donc en remplaçant dans, on obtient:
Cette équation s'appelle la Loi des aires et signifie que balaie les aires à vitesse constant . En particulier l'aire totale de l'ellipse est parcourue en un certain temps fixe: le mouvement est périodique. L'aire de l'ellipse vaut:
On retrouve bien la troisième loi de Kepler : avec . On définit alors l'anomalie moyenne par où est le temps de passage au périastre ( sur la figure), qui est proportionnelle à l'aire (voir figure).
Exercices
Conservation de l'énergie
Difficulté : ☆☆
Question 1)
Pour établir l'équation du mouvement, les conservations du moment cinétique et du vecteur eccentricité suffisent. On a une autre intégrale du mouvement: l'énergie. Considérons deux points matériels et de masses respectives et . On pose , et où est la constante universelle de gravitation.
Montrer que
Calculer l'énergie potentielle associée à la force de gravitation
On note . Déduire du théorème de l'énergie mécanique que est une quantité constante au cours du mouvement
Quel est le point de l'orbite où la vitesse de l'étoile est la plus élevée ? la moins élevée ?
Equation de Kepler
Equation de Kepler
L'équation de Kepler est une relation entre l'anomalie excentrique et l'anomalie moyenne, cette page présente un moyen de l'établir. L'aire est proportionnelle à l'anomalie moyenne .
L'ellipse de la trajectoire est obtenue par une affinité sur l'axe de rapport . Donc
Par ailleurs en notant l'angle
L'aire du triangle s'obtient facilement car
On a finalement l'équation de Kepler
Cette équation est "transcendante", en conqéquence il n'existe pas d'expression analytique de en fonction de . Cependant, on peut développer en puissances de .
Anomalies
Représentation de l'anomalie vraie , excentrique et moyenne .
Solutions en fonction du temps
Il reste à trouver une relation entre et , ce qui s'obtient aisément en exprimant la position de dans le plan :
On en déduit les relations utiles:
A ce point, rappelons que l'objectif est d'exprimer la position et la vitesse de l'étoile comme des observables. En exprimant en fonction de puis en fonction de on a la position du corps à un instant quelconque. En ce qui concerne l'astrométrie, on peut s'arrêter aux équations ci-dessus et simplement faire un changement de référentiel, c'ést à dire exprimer la projection de sur la sphère céleste et choisir un jeu de paramètres à ajuster. Pour les vitesses radiales nous avons besoin de . En dérivant l'équation de Kepler par rapport à on obtient:
D'où:
En pratique, il n'est pas nécessaire de calculer en fonction de . Les expressions ci-dessus suffisent. Pour mémoire, en remplaçant dans la formule trigonométrique , on obtient:
Changement de référentiel
Les observations sont disponibles dans un référentiel où est la direction d'observation et sont choisis de sorte que le repère est orthonormé direct. Le repère est lui aussi orthormé direct. La matrice de passage du repère orbital au repère d'observation est donc une rotation, que l'on décompose en trois rotations dont les angles ont des noms usuels.
Une rotation d'angle d'axe (parallèle au moment cinétique), cet angle est appelé argument du périastre. Le repère obtenu par cette rotation est noté .
Soit le barycentre du système {planète+étoile}, on note où sont appelées les constantes de Thiele-Innes. On conserve la notation classique pour ces constantes, qui sautent quelques lettres de l'alphabet pour une raison inconnue des auteurs. La notation n'est en revanche qu'une convention pour ce cours et ne se trouve pas spécialement dans la littérature. On ne donne pas de nom particulier aux éléments de la dernière colonne de la matrice car étant donné que , ils n'apparaissent jamais dans les calculs
Paramètres d'un mouvement à deux corps newtonien
Le plan de référence est ici le plan d'observation.
Paramètres orbitaux classiques
On peut caractériser l'orbite par les éléments suivants:
: le demi-grand axe
: l'excentricité
: la période
: l'argument du périastre
: l'inclinaison
: l'ascension droite au noeud ascendant
Ces éléments donnent la géométrie de l'orbite. Pour déterminer la position de la planète à un instant donné, il faut de plus connaître l'instant de son passage au périastre . On peut alors calculer connaisant on peut calculer l'anomalie excentrique par l'équation de Kepler, puis l'anomalie vraie . On en déduit la position sur l'ellipse par l'équation donnée page "Loi des aires", . Enfin, la position sur l'orbite est donnée par les rotations explicitées ci-dessus.
Conclusion pour le problème à deux corps
Dans un référentiel galiléen quelconque de centre , le mouvement de l'étoile en fonction du temps peut s'écrire:
Où est la position du barycentre du système {Etoile, Planète} à , est la direction du mouvement de et son module. où vérifiel'équation de Newton , qui est une équation différentielle de degré deux sur l'espace. Lorsque est fixé et la position et la vitesse à , sont connus, la position et la vitesse sont données par le flot: . En d'autres termes, les sept paramètres définissent une orbite de manière univoque. On peut faire un changement de variables pour décrire l'orbite par un autre jeu de sept paramètres, par exemple et , qui sont les paramètres classiques présentés dans la section précédente. La plupart des auteurs les utilisent pour ajuster le mouvement des planètes, mais ils ont l'inconvénient d'être très sensibles aux erreurs pour de faibles excentricités et inclinaisons. Pour palier à ce problème on définit:
: la longitude du périhélie
: le demi-grand axe
: l'inclinaison
: l'ascension droite au noeud ascendant
: la longitude
Ces éléments sont des fonctions continues de l'inclinaison et de l'excentricité.
Exercices
Auteur: Nathan Hara
Bonnes et mauvaises configurations d'observation
Difficulté : ☆☆
Question 1)
On définit un repère où la direction est selon la droite observateur - étoile. Avec les notations des pages précédentes, pour quelles valeurs de l'inclinaison les observations de vitesses radiales ne donnent aucune information sur le système ? lequelles rendent la configuration optimale ?
Même question pour les angles et en astrométrie.
Selon comment le système est tourné par rapport à l'observateur, la projection dans la ligne de visée ou sur le plan perpendiculaire peut être
On pourra se référer à la définition des angles sur "Changement de référentiel"
Auteur: Nathan Hara
Qu'est-ce que les vitesses radiales permettent de mesurer ?
Difficulté : ☆☆☆
Question 1)
On définit un repère où la direction est selon la droite observateur - étoile. On note les composantes du mouvement dans le plan orbital.
Calculer la composante du mouvement de l'étoile selon la direction d'observation. On mettra les observations sous la forme
, où est une constante à déterminer.
Quels paramètres de l'orbite peut-on observer par vitesse radiale ? Montrer en particulier qu'on ne peut pas déterminer la masse exacte de la planète.
Les expressions établies jusqu'ici permettent de paramétrer le mouvement d'une étoile autour de laquelle une planète orbite, en faisant l'hypothèse que les deux corps sont ponctuels, forment un système isolé. Nous allons utiliser ces expressions pour donner un modèle général, lorsque planètes orbitent autour de l'étoile.
En notant et respectivement la position et la masse de l'étoile et , les positions et masses des planètes , les équations de la mécanique (classique) dans le référentiel barycentrique de ce système sont:
En négligeant tous les termes du type , c'est à dire l'intéraction entre les planètes, on obtient:
En résolvant les problèmes à deux corps associés à chacune des planètes, par (dont la première équation du système ci-dessus est la dérivée seconde) on obtient le mouvement de l'étoile. Le modèle de trajectoire complet dans un référentiel galiléen est:
Trajectoire observée depuis le barycentre du système solaire
Le modèle précédent donne le mouvement de l'étoile observée dans un référentiel galiléen, en particulier le référentiel barycentrique du système solaire, que l'on munit d'un repère de coordonnées sphériques repérant l'étoile . Supposons que l'observateur est situé en . A un instant il mesure:
soit la vitesse radiale
soit la position sur la sphère céleste dans le cas de mesures astrométriques
On peut facilement montrer avec un développement limité qu'au premier ordre en , , , de même (à faire en exercice).
Supposons que planètes indéxées par gravitent autour de l'étoile en et le repère orbital de la planète . On projette le mouvement dans le repère orthonormé direct associé aux coordonnées sphériques (voir figure). Avec les notations de la page Changement de référentiel:
Observation depuis le barycentre du système solaire
Position de l'étoile en coordonnées sphériques dans le référérentiel barycentrique du système solaire et dans le référentiel translaté au centre de masse de la Terre. Les observations sont disponibles dans le référentiel terrestre, représenté en rouge, qui dépend de l'instant de mesure .
Trajectoire observée depuis la Terre
Le modèle précédent donne l'évolution de l'étoile dans le repère barycentrique du système solaire (RBSS). Or les observations sont disponibles depuis la Terre. Si est la position de l'observateur, l'étoile cible on a
La mesure de vitesse radiale est celle de , il faut donc soustraire des observations
En astrométrie on observe la projection du mouvement de l'étoile sur la sphère céleste à un certain instant. Non seulement il faut estimer comme dans le cas des vitesses radiales, mais aussi s'assurer que toutes les observations sont exprimées dans le même référentiel (par exemple le référenciel barycentrique translaté, sur la figure) alors que chaque observation est dans un référentiel dépendant de l'observation (en rouge sur la figure). L'expression des mesures prises à des instants différents selon une même échelle se pose aussi pour les vitesses radiales, mais passe par l'étalonnage de l'instrument de mesure.
La dérivée temporelle des vecteur est toujours définie par rapport à un référentiel. Ici la notation désigne la dérivée temporelle par rapport au RBSS.
La détermination de la position du centre de masse de la Terre par rapport au barycentre du système solaire est un sujet à part entière. La trajectoire d'un corps céleste au cours du temps dans un référentiel donné est appelée une éphéméride. Les principaux laboratoires de calcul des éphémérides sont le JPL (NASA) et l'IMCCE (Observatoire de Paris). Les liens envoient sur les générateurs en lignes d'éphémérides respectifs des deux laboratoires. .
Vitesses radiales
La vitesse de l'observateur par rapport au barycentre du système solaire peut se décomposer en . La partie est donné par les éphémérides, comme expliqué plus haut. La correction de la deuxième partie est essentielle: l'observateur parcourt deux fois le rayon terrestre en une nuit, ce qui donne une vitesse d'environ 300 m/s. Si désigne la matrice de changement de repère entre le référentiel lié à la Terre et le référentiel barycentrique du système solaire, on a où désigne la position de l'observateur dans le référentiel terrestre.
La détermination de est aussi un sujet à part entière, appelé "rotation de la Terre". Les paramètres de rotations officiels sont donnés par le Service de rotation de la Terre au SYRTE (Observatoire de Paris).
Parallaxe (astrométrie)
En ce qui concerne l'astrométrie, il faut exprimer la relation entre les positions mesurées et la position dans le RBSS, ce qui peut se décomposer en deux étapes: passer du référentiel terrestre au RBS translaté au centre de masse de la Terre (passer du référentiel rouge au référentiel noir à droite sur la figure), puis passer du référentiel translaté au RBS. Comme on le verra plus tard, il est aussi possible de se passer de cette étape en prenant un champ contenant des étoiles de référence.
Notons la position de la Terre dans le RBS. En exprimant dans le RBSS de deux manières on obtient une relation entre les coordonnées et :
Lorsque est suffisamment loin, ces expressions différenciées au voisinage de donnent au premier ordre en , et
On appelle la quantité la parallaxe de l'étoile (en général notée ou , qui sont des symboles déjà utilisés dans le cours). Elle considérée comme constante au cours des observations et est ajustée aux observations en astrométrie.
Remarque: la procédure de changement de référentiel passe par des changements d'échelle de temps (UTC, UT1, TDB...) qui ne seront pas détaillés ici.
Changement de coordonnées
Position de l'étoile en coordonnées sphériques dans le référérentiel barycentrique du système solaire et dans le référentiel translaté au centre de masse de la Terre. Les observations sont disponibles dans le référentiel terrestre, représenté en rouge, qui dépend de l'instant de mesure .
Accélération de perspective et changement de parallaxe (astrométrie)
Accélération de perspective
L'accélération de perspective est un effet purement géométrique, qui tient à la définition du mouvement propre d'une étoile. Le mouvement propre est en effet défini comme où est la vitesse du système observé, la distance entre l'observateur et le système, est l'angle entre la ligne de visée et la vitesse du système observé.
Nous supposons que les mesures astrométriques sont sur un plan. Cependant, on mesure la projection du mouvement sur une sphère, donc n'est pas constant au cours du temps. En dérivant par rapport au temps, comme est constant:
On voit sur le triangle que et . D'où:
En pratique on ajuste un terme quadratique , où le mouvement angulaire sur la sphère céleste est donné par .
Variation de parallaxe
La variation de parallaxe vaut: . Comme elle est du deuxième ordre en , elle n'est en général pas prise en compte.
Changement de coordonnées
Définition de
Etoile
Auteur: Nathan Hara & Jacques Laskar
Etoile
L'ajustement des paramètres orbitaux permet de connaître ou bien dans le cas des vitesses radiales. Il est impossible de distinguer les masses et séparément a priori. Cependant, on peut mesurer la masse de l'étoile de sorte à lever l'indetermination.
La modélisation des étoiles permet de distinguer les effets sur le spectre de la variation de leur flux lumineux de la présence de compagnons planétaires. Ces variations sont modélisées par des variables aléatoires suivant une certaine loi de probabilité, dont l'amplitude varie de plusieurs ordres de grandeur selon le type d'étoile. Plus l'étoile est active, plus l'amplitude du mouvement dû à la planète doit être grande pour distinguer la planète du bruit. En particulier certains types d'étoiles sont trop actives pour pouvoir détecter des potentielles super-Terres compagnon.
La description physique des étoiles est complexe car de nombreux phénomènes, tous interdépendants, ont lieu: convection, radiation, magnétisme... Les modèles utilisés en détection par vitesses radiales comprennent trois phénomènes
Les ondes de pression se propageant dans les couches extrérieures de l'étoile entrainent des compressions-dilatations de celles-ci, ce qui change la vitesse radiale moyenne observée par rapport à une photosphère statique.Cet effet affecte principalement les observations de vitesses radiales.
La granulation: phénomène convectif (c'est à dire lié au déplacement de matière dans l'étoile)
L'activité de l'étoile: la présence de régions sombres ou lumineuses à la période de rotation de l'étoile
L'impact de ces effets sur les mesures n'est pas simple à quantifier. Selon le type d'étoile et les instants d'observations, l'effet peut être très variable. Certains auteurs estiment les incertitudes par des simulations numérique, d'autres par des modèles théoriques. Nous donnons une description qualitative de ces phénomènes et une modélisation possible, mais il faut garder à l'esprit que c'est un sujet de recherche ouvert. Dans le cas des vitesses radiales, ces bruits sont classiquement modélisées par un processus stochastique d'une certaine densité spectrale de puissance, notion importante en statistique, qui est définie dans cette page.
Masse de l'étoile
La mesure de la masse de l'étoile peut se faire de deux manières
Par ajustement aux observations de modèles théoriques d'intérieurs stellaires.
Par mesure du mouvement dans un système binaire
Dans le premier cas, si la distance à l'étoile est connue (par exemple par mesure de parallaxe), on peut mesurer sa luminosité intrinsèque (si on ne connaît pas la distance on ne mesure évidemment que la luminosité apparente). Par son spectre, on peut mesurer sa température effective . Des modèles d'intérieurs stellaires permettent ensuite d'évaluer la masse. Cette estimation peut être rafinée avec un modèle d'atmosphère stellaire. On peut alors avoir la gravité à la surface de l'étoile . Comme et , on peut avoir une estimation de la masse.
Dans le cas des étoiles binaires (systèmes de deux étoiles), le spectre présente des raies des deux étoiles. Le mouvement de ces raies se fait à la même fréquence, mais dans des directions opposées (lorsqu'une étoile approche l'autre s'éloigne). La période de ces mouvements est liée à la masse du système par l'équation de Kepler. L'amplitude relative de ces mouvements permet de déterminer la masse des deux étoiles séparément. Comme dans le cas de la détermination des orbites des planètes, la masse n'est connue qu'à un faceteur près. Pour lever cette indetermination, il faut déterminer l'inclinaison de l'orbite par rapport à l'observateur . Si on observe des eclipses (une binaire passe devant l'autre), . Si le système n'est pas dans cette configuration, on peut séparer angulairement les deux étoiles par des techniques d'interférométrie.
Processus stochastique et Densité spectrale de puissance
Processus stochastique
La notion de densité spectrale de puissance (DSP) n'est pas simple à définir, cependant très utilisée dans la littérature de traitement du signal. Nous donnons une définition mathématique pour qu'il n'y ait pas d'ambiguités mais compte tenu de la sophistication des notions introduites, le lecteur pourra se référer à la description qualitative suivante.
La densité spectrale de puissance est une propriété relative à plusieurs variables aléatoires. Les familles de variables aléatoires peuvent par exemple représenter des mesures sur lesquelles on a une incertitude. A chaque instant de mesure on associe une variable alétoire qui a une certaine densité de probabilité. En physique théorique ou en économie, on rencontre des processus stochastiques continus - typiquement le mouvement brownien, qui représente des mouvements d'atomes ou des fluctuations de prix. Formellement, un processus stochastique est une famille de variables aléatoires indexées par un ensemble totalement ordonné , toutes définies sur le même espace de probabilité (. Dans ce cours on aura seulement besoin de ou . On note l'espérance mathématique.
Dans le cas général, la densité de probabilité de la variable aléatoire (pour ) dépend des valeurs prises à d'autres "instants" par les autres variables aléatoires. En particulier on peut s'intéresser à une éventuelle probabilité de périodicité. Par exemple si on modélise un nombre de ventes de vêtement par jour, on verra des ventes plus importantes au moment des soldes (à peu près tous les six mois). La densité spectrale de puissance est un outil qui permet de visualiser ce genre de périodicité. Dans la section suivante, on voit que si on prend une famille de variables aléatoires certaines, c'est à dire que vaut une certaine valeur réelle avec la probabilité 1, la DSP en une fréquence est égale à , où est la transformée de Fourier de . Si maintenant est une variable alétoire, la DSP sera la "transformée de Fourier typique" d'une réalisation de .
Pour définir cette notion mathématiquement, on doit d'abord introduire les notions de convergences et intégrales en moyenne quadratique. Pour plus de précision le lecteur peut se référer au cours de Timo Koski à KTH.
Intégrale en moyenne quadratique (Mean Square Integral)
Rappelons d'abord que si sont des variables aléatoires et une fonction mesurable alors est une variable aléatoire. En particulier, si est un scalaire, et sont des variables aléatoires. Pour un rappel sur les variables aléatoires, voir le cours de Didier Pelat.
Soit un espace de probabilités, on dit que la suite de variables aléatoires telle que , définies sur cet espace converge en moyenne quadratique si et seulement si:
Soit un processus stochastique continu () tel que chacune des variables aléatoires a une espérance finie (). L'intégrale en moyenne quadratique du processus sur l'intervalle est définie comme la limite en moyenne quadratique (lorsqu'elle existe) de:
Cette définition un peu complexe peut être vue comme une généralisation de la transformée de Fourier à des processus stochastiques. En effet, lorsque le processus est telle que avec une probabilité 1, l'intégrale en moyenne quadratique se comporte comme l'intérale de Riemann, alors est le carré du module de la transformée de Fourier de la fonction réelle d'une variable réelle . Dans le cas où les sont aléatoire, est le carré de la transformée de Fourier "en moyenne" des réalisations de Par exemple si modélise une tension mesurée au cours du temps dans une expérience d'électronique réalisée un grand nombre de fois, donnant profils de tension à l'expérience (des réalisations du processus stochastique ), la moyenne des carrés du module des transformées de Fourier des notée sera approximativement égal à . Si le nombre d'expérience tend vers l'infini en norme 2.
Dans le cas d'un processus stationnaire discret (), on peut directement définir et .
Processus stationnaires au sens large
La densité spectrale de puissance a une définition plus simple lorsque le processus est stationnaire, c'est à dire lorsque le processus vérifié:
Il existe tel que
La fonction d'autocorrélation ne dépend que de , i. e. tels que , on a . On note appelle alors habituellement la fonction d'autocorrélation , telle que
Les processus stationnaires modélisent des phénomènes qui ont une certaine invariance dans le temps, en particulier la covariance ne dépend pas de de manière absolue, mais de manière relative à un autre instant. Dans ce cas, la densité spectrale de puissance est égale au carré du module de la transformée de Fourier de la fonction . L'équivalence avec la définition de la densité spectrale de puissance donnée plus haut est établie par le théorème de Wiener-Khinchin.
Granulation
Le phénomène de granulation est lié à la convection du gaz dans l'étoile. La lumière rayonnée par le gaz chaud remontant à la surface va vers l'observateur, la longueur d'onde reçue est donc décalée vers le bleu. En rayonnant, le gaz se refroidit, puis repart vers le centre de l'étoile. Etant moins chaud, il émet moins de lumière, si bien que la lumière est globalement décalée vers le bleu. Ce phénomène est variable dans le temps, donc le décalage vers le bleu aussi. Cette variation peut apparaître dans le spectre et créer des fréquences parasites. La nature aléatoire du phénomène fait que même après ajustement, il reste un bruit résiduel. Pour une étoile de type solaire, il est de l'ordre de 0.5 - 1 m/s sur une observation.
La granulation est en général modélisée par un processus stochastique dits de bruits en créneaui (popcorn noise ou burst noise en anglais). Il s'agit de processus stochastiques pouvant prendre deux valeurs, par exemple -1 ou 1 avec une probabilité de changement suivant une loi de Poisson (loi exponentielle). Si à la valeur passe de 1 à -1, la densité de probabilité pour que la valeur passe à 1 à est où est un réel positif. Pour les vitesses radiales, la densité spectrale de puissance de ces bruits peut être modélisée par::
Cette modélisation, due à Harvey (1985) a depuis été revue et d'autres densités spectrales de puissances ont été proposée à partir de simulations 3d de convection au sein d'une étoile. En pratique, le bruit dû à la granulation apparaitra comme un signal périodique de l'ordre de cinq minutes. Cependant, on observe aussi des phénomènes appelés meso-granulation et super-granulation sur des échelles de temps plus longues. La contribution totale de ces bruits est:
Où les indices g, mg et sg se réfèrent respectivement à la granulation, la méso granulation et la super-granulation. En anticipant un peu sur le troisième chapitre, lorsque ces bruits sont pris en compte, les valeurs des et sont ajustés sur le spectre de puissance du signal.
Activité magnétique
La formation d'arcs de champ magnétique à la surface de l'étoile inhibe le mouvement des particules, donc réduit la température et provoque donc des tâches sombres. Cet effet à des effets à court termes (à la fréquence de rotation de l'étoile mois), et à plus long terme à travers des cycles d'activité magnétique.
A court trerme, la tache introduit une dissymétrie entre la partie de l'étoile tournant vers l'observateur, et la partie s'en éloignant, ce qui engendre un décalage du spectre mesuré. D'autre part, la tache engendre un déplacement du photocentre de l'étoile périodique, pouvant être confondu avec la présence d'une planète. Pour éviter ces confusions, on estime la période de rotation de l'étoile par spectroscopie, et on ajuste des sinusoïdes à cette période et ses premières harmoniques.
L'activité magnétique peut se mesurer à travers divers indicateurs, dont on analyse les corrélations.
Toujours selon le modèle de Harvey (1985), la densité spectrale de puissance du bruit de vitesse radiale induit par une tache solaire est:
Effet de la rotation de l'étoile sur le spectre
La lumière provenant de la moitié de l'étoile ayant un mouvement vers l'observateur est décalé vers les hautes fréquences (vers le bleu). L'autre moitié est décalée vers les basses fréquences (vers le rouge). Dans l'hypothèse où l'étoile est sphérique, et a une luminosité identique partout sur sa surface, le décalage vers le rouge et celui vers le bleu ne fait qu'élargir les raies spectrales. Si une tache est présente, ici sur la partie bleue, la symétrie est brisée et le déficit de lumière entraine un décalage du spectre vers le rouge.
Oscillations radiales (vitesses radiales)
Des inhomogénéités de densité dues aux mouvements convectifs font que des ondes mécaniques se propagent au sein des étoiles. Certaines de ces ondes sont radiales, ce qui provoque un mouvement d'ensemble de la photosphère qui a une signature sur le décalage du spectre mesuré. L'étude de ces ondes est un domaine de la physique stellaire appelé "astérosismologie". Etant donné que la théorie est accessible au niveau licence, nous en donnons des principes généraux.
La théorie procède comme suit: on écrit localement 1) l'équation du mouvement linéarisée au premier ordre au voisinage d'un état d'équilibre, 2) la conservation de la masse ou équation de continuité, 3) l'équation de Poisson, liant le potentiel gravitationnel et la densité, 4) Le premier principe de la thermodynamique. On néglige l'effet du champ magnétique. En général, on fait l'hypothèse que le terme de transfert thermique dans le 1er principe est nul.
Perturbations atmosphériques
Vitesses radiales
L'atmosphère peut influencer la mesure de vitesses radiales de deux manières:
Par atténuation de l'intensité, ce qui augmente le bruit de photon
Par la modification du contenu spectral du signal
La présence de lignes spectrales d'émission ou d'absorption est difficile à corriger. C'est pourquoi on ne considère que des plages de fréquences où l'intensité des raies atmosphériques est inférieure à 1/10000 de l'intensité de la cible. De plus, la réponse de l'atmosphère dépend de la longueur d'onde. Le spectre obtenu est pondéré de sorte à corriger ces inhomogénéités.
Astrométrie
Avant de parvenir au télescope, la lumière issue de l'étoile traverse l'atmosphère. Les turbulences aux hautes altitudes créent des inhomogénéités de densité, donc d'indice optique, qui distordent le front d'onde de la lumière pénétrant dans l'atmosphère. La modélisation classique de ce phénomène passe par l'introduction de "Structure functions" qui modélisent la densité de probabilité des champs de vitesses, densité etc.
Afin de ne pas surcharger le cours, nous ne donnerons qu'un modèle très simple de ce phénomène. Les mouvements de turbulence forment des "cellules" de composition homogène et d'une taille typique . Vue du dessus, l'atmosphère se comporte approximativement comme un tableau de pixels de taille dont chaque cellule introduit une déviation angulaire du faisceau incident. Cette déviation est de l'ordre de . Dans le cas limite où une cellule a un indice 0 et les cellules avoisinantes ont un indice 1 (sont opaques), on retrouve l'ordre de grandeur de la diffraction. Les fronts d'ondes issus de ces différents pixels arrivent au télescope avec des angles différents, donc donnent chacun une image différente appelé "speckle". L'union de ces speckle forme une tache lumineuse élargie de taille environ égale à .
Récapitulation
Les effets expliqués précédemment sont pour la plupart périodiques, donc peuvent être confondus avec le signal d'une planète. Le tableau suivant récapitule ces effets, leurs amplitudes et périodes typiques pour des étoiles de type solaire.
Effets physiques
Effet
Description
Amplitude (vitesse radiale)
Amplitude (astrométrie)
Echelle de temps
Mouvement des planètes
Le mouvement des planètes autour de
l'étoile engendre un mouvement périodique
1 cm/s - 200 m/s
Terre: 0.3, 0.03 as
Jupiter: 500, 20 as
à 1 et 10 parsec resp.
de un jour à plusieurs centaines d'années
Mouvement propre
Mouvement rectiligne uniforme
Dizaines de kilomètres par seconde
10 - 1000 mas pour les étoiles observables
Mouvement non périodique
Taches
La présence de taches sombres ou lumineuses
dues à l'activité magnétique provoque une
disymétris entre la luminosité de la partie bleue
et la partie rouge de l'étoile, engendrant un décalage
du spectre ou du photocentre.
1 m/s
Avec ces trois effets,
0.5 - 10 UA
Période de rotation de l'étoile (quelques jours)
Activité magnétique (long terme)
Le nombre de tâche à la surface de l'étoile peut varier
de quelques unes à plusieurs centaines. Par exemple le
soleil a une périodicité de 11 ans. L'effet
précédent est modulé par ces variations à long terme.
10 m/s
1 - 10 ans
Granulation
Le mouvement convectif à l'intérieur de l'étoile provoque
un mouvement du gaz dans la photosphère
0.5 - 1 m/s
Granulation: quelques minutes, mesogranulation:
Oscillations radiales (p-modes)
La propagations d'ondes acoustiques dans le manteau
de l'étoile entraîne une oscillation de celui-ci
0.5 - 1 m/s
inconnu
5 - 10 minutes
Système multiple
La présence d'autres étoiles orbitant autour de l'étoile
cible engendre un mouvement décrit par les mêmes
équations que celles utilisées pour les planètes. Les autres
étoiles étant beaucoup plus massives que des planètes,
l'effet est plus important.
1 - 30 km/s
0.1 - 1 as/an
10 - 100 ans
effets observationnels
Effet
Description
Amplitude (vitesse radiale)
Amplitude (astrométrie)
Echelle de temps
Mouvement de l'observateur dans le RBSS
Comme l'observateur est en mouvement dans un référentiel
galiléen,
30 km/s (après soustraction, on a une erreur 0.5 m/s
à cause des incertitudes sur la rotation de la Terre
et les éphémérides)
0.01 - 0.1 as/an
Une année
Perturbations atmosphériques
La présence de raies spectrales atmosphériques peut perturber
les observations par vitesses radiale, et les turbulences dévient
les fronts d'ondes, engendrant un déplacement apparent des sources.
0.5 m/s
1 mas
Quelques minutes
Instrumentation & Observations
Objectifs
Jusqu'à présent, on a modélisé la lumière qui parvient à un observateur théorique situé au voisinage de la Terre. Dans cette section, on présentera l'aspect concret de l'observation, en particulier les instruments. En astrométrie on mesure la position sur le detecteur CCD sur le plan focal du télescope, pour les vitesses radiales on utilise un spectrographe dont l'entrée est située au point focal du télescope .
Il est essentiel de bien comprendre le fonctionnement des instruments pour des raisons évidentes: ils constituent notre seule source d'information et leur étude permet de mieux modéliser les mesures, donc d'exploiter au mieux les données.
Dans le cas de l'astrométrie comme celui des vitesses radiales, deux conditions sont nécessaires pour obtenir des mesures suffisamment significatives:
La quantité de lumière collectée doit être suffisament grande pour obtenir le signal sur bruit désiré
Les erreurs instrumentales doivent être suffisamment petites pour avoir un rapport signal sur bruit acceptable.
En astrométrie comme en détection par vitesses radiales on place un dispositif sur le plan focal d'un télescope, respectivement des capteurs CCD et l'entrée d'un spectromètre (ou spectrographe). C'est pourquoi les principes généraux des télescopes seront présentés. On évoquera le fonctionnement des spectrographes utilisés pour les détections par mesures de vitesses radiales.
Spectrographe ELODIE
Cet appareil a permis la détection de 51 Pegasi b en 1995 par Michel Mayor et Didier Queloz à l'Observatoire de Haute Provence
Crédit :
Observatoire de Haute Provence
Télescope
Un télescope est un appareil permettant de recueillir un rayonnement eléctromagnétique. Pour observer un rayonneme
nt dans le visible ou dans l'infrarouge proche, on utilise des télescopes à miroir parabolique. Pour éviter les ambiguités, on définira le plan focal comme le plan perpendiculaire à l'axe optique (ici l'axe de symétrie du télescope) passant par le foyer, et on fait l'hypothèse que les rayons reçus font un angle faible avec l'axe optique. Dans ces conditions, La relation donnant la distance au point focal de l'image d'un rayon arrivant avec un angle sur le plan focal est en première approximation , où est la distance focale. Pour les angles faibles, on peut travailler avec une lentille équivalente au télescope, de même diamètre et distance focale. On va introduire trois notions de bases sur les télescopes: le champ, la résolution angulaire et la vitesse d'acquisition.
Le champ est la portion du ciel observée par le détecteur du télescope. Comme le détecteur est au plan focal, il est égal à
La résolution angulaireest l'angle minimal entre deux sources permettant de les séparer par le système de détection. Cette définition est vague, et Supposons qu'une source ponctuelle émettant à une longueur d'onde soit placée en un point du plan focal . A cause du phénomène de diffraction, la lumière ne sera pas émise selon une direction unique, mais son énergie sera répartie sur certains angles centrés sur . Comme la lumière suit le même trajet dans les deux sens, ce détecteur reçoit de la lumière provenant de ces angles.
Le rapport du diamètre et de la distance focale du télescope donne la "vitesse" de l'instrument. En effet, considérons une source circulaire de taille angulaire , son image sur le plan focal est un cercle d'aire . L'intensité observée est proportionnel à l'aire du télescope, donc l'énergie par unité de temps reçue est proportionnelle à . On définit l'ouverture du télescope par Le rapport signal sur bruit des mesures de CCD est égal à où est le nombre moyen d'électron par unité de temps et est le temps d'intégration (voir Bruit de photon). On peut calculer le temps d'intégration minimal pour obtenir un certain signal sur bruit compte tenu de l'ouverture du télescope, de la taille de la source et de son intensité. Plus l'aire et grande, plus la distance focale est petite, et plus l'instrument collecte rapidement le nombre de photons requis.
Cependant, lorsque l'ouverture augmente, la résolution angulaire diminue.
Miroir parabolique
Les rayons perpendiculaires à l'axe de symétrie d'une parabole parviennent au point focal .Ceux qui arrivent avec un certain angle arrivent légèrement décalés.
CCD
Un détecteur CCD est composé de trois partie: des électrodes en silicium, un isolant en et une jonction de semiconducteurs NP. Les électrodes en polysilicium sont reliées périodoquement par un fil conducteur (toutes les trois électrodes sur la figure) de sorte à créer un profil de potentiel électrique alternant puits et régions plates. Le principe d'un capteur CCD est le suivant (voir figure)
Lorsqu'un photon percute un atome du slicium dopé N, un électron est émis par effet photo-électrique.
Une jonction de semi-conducteurs dopés crée un champ électrique (exactement comme dans une diode). Comme la force qui s'exerce sur l'électron est où est le champ électrique, est la charge de l'électron, et que le champ est orienté vers le bas l'électron est piégé sous l'isolant.
L'électron est confiné dans un puit de potentiel électrique, selon l'endroit où il a été émis
Ces trois premières étapes ont lieu pendant tout le temps d'intégration. Ensuite, le nombre d'électron par puit de potentiel est compté, voir (b) sur la figure. Les puits de potentiels sont progressivement décalés et le nombre d'électrons s'y trouvant est compté par puit.
Le contrôle de l'erreur induite par la CCD est primordial et peut s'avérer très complexe. Nous ne rentrerons pas dans ces considérations.
Schéma de principe d'un capteur CCD
Bruit de photon
Le bruit de photon est une limitation fondammentale en astronomie car il est dû à la nature de l'émission de la lumière. En effet, les instants d'émission de deux photons sont indépendants les uns des autres.On peut montrer mathématiquement qu'une suite d'évènement indépendants, sans mémoire et stationnaire est nécessairement un flux de Poisson. Dans notre cas, si on note le temps d'attente entre deux émission de photon, la probabilité que soit supérieure à sachant que est où est une constante.
Cette constante a une interprétation physique: plus elle est grande, plus diminue rapidement à donné, c'est à dire plus la probabilité que soit long diminue. On peut montrer est le nombre d'évènement par unité de temps moyen, proportionnelle à l'intensité. Rappelons que le détecteur capte des photons pendant le temps d'intégration. Le nombre de photons reçus pendant ce temps est une variable aléatoire suivant la loi:
Qui est appelée loi de Poisson. La moyenne et la variance d'une telle loi sont égales et valent . En conséquence, l'écart-type vaut donc le rapport signal sur bruit (Signal-to-Noise Ratio) est:
Exercices
Auteur: Nathan Hara
Magnitude et temps d'observation
Difficulté : ☆☆
Question 1)
Au deuxième siècle avant J.-C., l'astronome Hipparque a classé cinquante étoile par ordre de brillance en 6 catégories, les plus brillantes occupant la première. L'échelle de magniture apparente moderne est sous la forme où est le flux lumineux reçu et un flux de référence. Le choix de 2.5 et W fait que les étoiles de classe 1 d'Hipparque aient une magnitude comprise entre 0 et 1, les classes 2 on une magnitude entre 1 et 2 etc. De ce fait, il semble naturel que les objets les moins lumineux visibles à l'oeil nu soient environ de magnitude 6. On considère un télescope de diamètre , on suppose qu'on observe dans le visible nm, et que le flux lumineux reçu ne dépend pas de la longueur d'onde sur cette plage.
Sachant qu'un photon a une énergie où est la longueur d'onde et la vitesse de la lumière, montrer que le flux de photon reçus (photons par seconde) est lié au flux par
Donner l'expression du temps d'intégration pour obtenir un rapport signal sur bruit en fonction de la magnitude observée, de et
Le bruit de photon est il plus grand pour les étoiles peu lumineuses ou très lumineuses ?
Attention le flux lumineux dépend de la longueur d'onde
Effet Doppler
On considère une source d'ondes et un observateur. Selon leur vitesse relative, la fréquence reçue par l'observateur varie: c'est ce qu'on appelle l'effet Doppler. Dans le cadre de la physique classique et d'une onde harmonique (purement sinusoidale), on peut le calculer simplement. En effet, notons la distance entre la source et l'observateur, la vitesse de l'onde et. Par définition d'une onde harmonique de pulsation et d'amplitude , l'amplitude mesurée à et vaut
Où donne en particulier la phase en . Si la distance varie avec le temps selon , alors en et on mesure
Donc pour l'observateur, tout se passe comme s'il recevait une onde de pulsation ou de longueur d'onde et de phase .
Cependant, lorsque est la vitesse de la lumière, la relativité générale donne une description beaucoup plus précise du phénomène. Nous ne présenterons pas le calcul menant à l'expression de l'effet Doppler dans ce cadre mais en donnons l'expression:
Où est l'angle entre la direction de la vitesse relative et la ligne de visée observateur-source. Remarquons que lorsque tend vers et tend vers 0, l'expression tend vers l'expression classique.
Spectrographe
L'observation des vitesses radiales nécessite de mesurer des longueurs d'onde très précisément, pour cela on utilise des spectrographe. Les équipes américaines et européennes utilisent des appareils différents, mais dans les deux cas ce sont des spectrographes d'échelle. Le principe d'un tel instrument est d'observer simultanément plusieurs ordres élevés de diffraction à l'aide de deux diffractions successives. La lumière est d'abord diffractée par un premier réseau. Un dispositif, appelé "echelle grating" est placé à un certain angle (blazing angle) du premier réseau de sorte à recevoir des ordres élevés de la première diffraction, qui sont diffractés à nouveau.
Ce dispositif permet "d'étaler" le spectre de sorte qu'une rangée de détecteurs CCD reçoit des longueurs d'ondes très proches, ce qui permet une haute résolution spectrale. En contrepartie, l'énergie est elle aussi répartie, ce qui augmente le temps d'intégration nécessaire pour recevoir suffisamment de lumière pour obtenir un certain rapport signal sur bruit.
D'une mesure à l'autre, à cause de variations internes à l'instrument (température, pression), une longueur d'onde donnée peut se décaler. Comme les mesures doivent pouvoir être comparées entre elles; ce problème doit être résolu efficacement: il faut étalonner l'instrument. Sur ce point, les instruments européens et américains diffèrent. Pour les premiers: ELODIE, CORALIE, HARPS, HARPS-N, l'étalonnage se fait en observant simultanément l'étoile cible est une source dont le spectre est connu. ELODIE observe le ciel, HARPS une lampe thorium-argon calibrée et HARPS-N utilise deux calibrations: un spectre de Fabry-Perot et un "laser frequency comb" (un laser dont le spectre est constitué de raies régulièrement espacées). Les instruments américains font passer la lumière par une cavité contenant de l'iode, dont la position des raies d'absorption est connue. Dans les deux cas on peut comparer Les raies du spectre de référence et celles de l'étoile observée. Si leur déplacement est corrélé (elles se décalent simultanément), il est dû à l'instrument.
La résolution spectrale de ces spectrographes, c'est à dire le rapport d'une longeur d'onde et de la sa variation détectable par le dispositi f est de l'ordre de 100000. Des simulations numériques (Hatzes & Cochran 1992) ont montré que l'écart type sur la mesure finale de vitesse radiale vérifie:
Où est l'intensité reçue, est la plage de fréquences considérées et est une constante de proportionnalité. Comme certaines longueurs d'ondes jugées contaminées peuvent être exclues de certaines mesures, cette valeur varie d'une mesure à l'autre.
Principe du spectrographe d'échelle
Le rayon incident est d'abord diffracté sur une grille standard (std. grating), puis à nouveau diffracté par le réseau d'échelle. Les trois spectres finalement obtenus sont reçus par des capteurs CCD.
Crédit :
"Echelle Principle" by Boris Považay (Cardiff University) - Own work. Licensed under CC BY-SA 2.5 via Wikimedia Commons
Cross-correlation Function
Nous avons expliqué que la mesure des vitesses radiales se fait par mesure du déplacement du spectre. Cependant, nous n'avons pas précisé comment ce déplacement était mesuré. Il y a a priori beaucoup d'estimateurs classiques. La méthode majoritairement adoptée repose sur une "cross correlation function" (CCF) ou fonction de corrélation.
Les étoiles ont certains types de spectres que l'on sait reconnaître. Pour une étoile donnée, on définit un "masque" valant 1 pour correspondant à une raie d'absorption de l'étoile et 0 ailleurs. Le spectre de l'étoile observée est multiplié par ce masque décalé d'une valeur et on mesure . Où et désignent les bornes inférieures et supérieures du spectre observé. Ensuite, une fonction gaussienne est ajustée sur la CCF. La valeur correspondant au minimum de la fonction ajustée est prise comme valeur moyenne du déplacement. L'analyse consiste ensuite à comparer les issus d'observations différentes.
La CCF n'est elle même pas symétrique. Ses propriétés d'assymétrie sont analysées, car elles sont significatives d'effets physiques.
Réduction - Problème inverse
Objectif
La modélisation physique du phénomène nous a permis d'obtenir un modèle où sont les paramètres du modèle et sont les instants d'observation. De nombreuses sources d'erreurs ont aussi été listées. On se pose maintenant la question suivante: comment estimer les paramètres du modèle compte tenu des observations ?
Après avoir listé diverses sources de signal et de bruits de l'émission de la lumière à la valeur donnée par le déteteur, nous allons maintenant donner une expression finale au modèle. Cette expression n'est pas universelle, et selon l'étoile observée, la précision recherchée, d'autres formulations peuvent être préférables.
Après avoir établi ce modèle, on donnera quelques principes d'analyse statistique et des moyens algorithmiques pour estimer les paramètres du modèle. On verra en particulier que l'analyse "dans le domaine fréquenciel" est particulièrement importante.
Modèle final
Le modèle comportera une partie déterministe et une partie aléatoire. Pour l'astrométrie, la position sur la sphère céleste est
Où est la position initiale de l'étoile, sont les composantes du mouvement propre sont des termes d'accélération de perspective, sont les constantes de Thiele-Innes de la planète , et sont ses coordonnées sur son plan orbital, est la parallaxe, sont les coefficients parametrant le mouvement de la Terre, Les sont les bruits résiduels modélisés par des bruits gaussiens.: sont les bruits stellaires, sont les bruits atmosphériques et représentent des bruits instrumentaux.
Où est la vitesse de l'observateur dans le référentiel barycentrique du système solaire, est la composante du mouvement propre dans la direction radiale, est le signal stellaire dû à la granulation, aux oscillations et à l'activité, est le bruit stellaire résiduel et le bruit associé à la mesure.
Dans les deux cas, les techniques de réduction de données visent à trouver des paramètres qui sont "plausibles", en l'occurrence, qui reproduisent les observations.
Traitement statistique
Rappelons qu'une variable aléatoire peut être vue comme un programme informatique qui délivre des valeurs suivant une certaine distribution de probabilité lorsqu'on lui demande. Le problème que nous posons maintenant est équivalent au suivant. Supposons qu'un ordinateur ait en mémoire des paramètres (nombre de planètes, leurs caractéristiques orbitales, la période de rotation de l'étoile etc.). S'il n'y avait pas de bruit, une mesure à l'instant reviendrait à demander à l'ordinateur d'évaluer une fonction . Nous connaissons et (c'est l'un des modèles de la page précédente), mais nous ne connaissons pas . Notre but est de le déterminer à partir des mesures . Ce principe est similaire à la résolution d'une énigme: quelqu'un connaît une information et nous essayons de la deviner en posant une question. Dans le cas sans bruit, celui qui pose l'énigme ne nous induit pas en erreur, mais cela ne veut pas dire que la résolution est facile !
Exemple: on veut trouver les paramètres d'une fonction affine du temps (ici ). On évalue la valeur de en , on obtient : on a deux inconnues pour une équation, on ne peut pas résoudre. Si on a , avec , alors on a et .
Notre cas est plus compliqué. Les valeurs que nous obtenons sont où est la réalisation d'une variable aléatoire . A l'appel numéro du programme, l'ordinateur fait appel à un autre programme qui délivre une variable alétoire selon une certaine loi. En l'occurrence, nous supposons cette loi gaussienne. Si nous faisons mesures, tout se passe comme si un programme principal évaluait la fonction et programmes secondaires , retournent chacun une valeur . Si nous pouvions remonter le temps et faire les mesures plusieurs fois aux mêmes instants, on aurait des des vecteurs de mesures , puis etc. (notez qu'ici et sont des vecteurs.
Comme nous ne connaissons que la loi suivie par les variables , ils nous est impossible de connaître les paramètres avec certitude. On leur attache une "erreur", qui quantifie l'incertitude que l'on a sur eux. En reprenant l'exemple précédent on mesure et . Si on estime et avec les mêmes formules, on fera une erreur sur et une erreur sur (admis).
Bruits
Dans le modèle , le symbole désigne un bruit gaussien. Comme ils apparaissent constamment en détection de planètes extrasolaires et ailleurs, nous allons en donner quelques propriétés.
A une expérience donnée, prendra une valeur imprévisible. La probabilité que la valeur de soit comprise entre et est où est la densité de probabilité de . Dire que est un bruit gaussien veut dire que sa densité est de la forme où et sont des réels, qui sont égaux respectivement à la moyenne et à l'écart-type de . On note souvent , qui signifie " suit une loi gaussienne de moyenne et de variance . Dans la plupart des cas, le bruit est de moyenne nulle (c'est le cas ici).
Dans le modèle, des bruits d'origines différentes s'additionnent. Sachant que le résidu de l'activité stellaire que nous n'avons pas ajusté et le bruit de mesure suiven une certaine loi, quelle loi suivra ? Nous pouvons déjà dire que la moyenne de sera égale à la somme des moyennes de et car l'espérance est un opérateur linéaire. Peut-on dire plus ? Si ces bruits dépendaient l'un de l'autre, la réponse pourrait être complexe. En l'occurrence, la physique de l'étoile cible et les erreurs instrumentales sont totalement indépendantes. On peut montrer que dans ces conditions, la variance de est égale à la somme des variances de et . Nous pouvons même aller plus loin car la somme de deux variables gaussiennes indépendante est une variable gaussienne. En résumé, en l'occurrence et sont nulles.
Lorsqu'on dispose de plusieurs mesures, à l'expérience numéro on a un certain bruit réalisation d'une variable de densité . La plupart du temps, on fait l'hypothèse que les brutis sont indépendants, c'est à dire que la probabilité d'obtenir le bruit à l'expérience ne dépend pas des valeurs prises aux expériences précédentes et suivantes. Lorsque ce n'est pas le cas on parle de bruits corrélés. Pour les caractériser, on utilise souvent leur densité spectrale de puissance. Un certain profil de densité spectrale correspond à une "couleur" du bruit.
A retenir: la somme de variables gaussienne indépendantes où est une variable gaussienne suivant la loi .
Signification statistique
Il esiste plusieurs outils pour s'assurer qu'une détection possible n'est pas due au bruit. L'un des plus utilisé est le test de signification (significance en anglais), qui consiste à calculer la probabilité d'avoir le signal observé "au moins aussi grand" s'il n'y avait en réalité que du bruit. Par exemple, qupposons que l'on veuille mesurer une quantité qui est perturbée par un bruit gaussien additif de moyenne nulle et d'écart-type , donnant une mesure .
Si il n'y avait en réalité pas de signal (), les mesures seraient uniquement dues au bruit. On imagine deux cas de figures:
1er cas: on mesure . La probabilité d'avoir obtenue une valeur au moins aussi grande par hasard, c'est à dire la probabilité que sachant que est
2ème cas: on mesure . La probabilité pour que alors que est
Ces valeurs ont une interprétation: si on réalisait exactement le même type de mesure alors qu'il n'y a pas de signal, on observerait dans % des cas et dans % des cas.Dans le premier cas, la probabilité d'avoir un signal aussi grand que celui que l'on a mesuré est grande. On ne peut pas assurer qu'un signal a été détecté. Par contre, dans le deuxième cas on serait dans un des deux cas sur un milliard où le signal serait dû au bruit. On peut alors dire qu'on a détecté un signal à , car la valeur de l'écart-type du bruit est , sa moyenne est , donc on a .
Détecter un signal "à 10 sigmas" est un luxe que l'on peut rarement se payer. Les détections sont annoncées plutôt pour des valeurs de sigmas.
Remarque importante: on calcule la probabilité d'avoir les observations sachant qu'il n'y a pas de signal et non la probabilité d'avoir un signal sachant les observations qui est une quantité qui a davantage de sens. Le calcul de cette dernière quantité se fait dans le cadre du calcul bayésien, outil très puissant qui ne sera pas développé dans ce cours.
Exercices
Auteur: Nathan Hara
Espérance et variance de la moyenne empirique
Difficulté : ☆☆☆
Question 1)
On rappelle que l'espérance et la variance d'une variable alétoire de densité de probabilité sont données par et
Soit une variable aléatoire et un réel. Montrer que et
Soient et deux variables aléatoires indépendantes. Montrer que .
On définit la covariance par . Montrer que
Nous allons maintenant voir un cas où la précision d'un estimateur est facilement calculable. On considère mesures entachées de bruits gaussiens d'une quantité fixe . Plus précisément, la mesure numéro est modélisée par une variable aléatoire où est un bruit gaussien de moyenne nulle et de variance . On suppose que les mesures sont indépendantes, ce qui implique en particulier que pour . Pour obtenir une estimation de , on fait la moyenne empirique des expériences, c'est à dire . Montrer que et
La précision de l'estimateur augmente-t-elle avec le nombre de mesures ?
Loi du chi 2
Nous nous sommes toujours ramenés à des modèles du type: modèle déterministe + bruit gaussien. Afin de vérifier que les observations sont compatibles avec le modèle, on étudie les résidus, définis comme "les observation - le modèle ajusté".
La loi du est un outil commode pour étudier le comportement de plusieurs variables gaussiennes. Considérons d'abord une famille de variables aléatoires gaussiennes indépendantes , de moyenne nulle et de variance unité. On forme la quantité . Comme les sont des variables aléatoires, les le sont aussi. La somme de variables alétoires étant toujours une variable alétoire, suit une certaine loi de probabilité. Dans l'analogie avec un programme informatique, la variable alétoire se comporte comme un programme qui appelle programmes générant une variables gaussiennes, puis additionne leurs carrés. Elle est appelée loi duà m degrés de liberté. On peut montrer qu'en moyenne une variable gaussienne au carré a une moyenne de 1. En conséquence, vaudra typiquement .
Pourquoi cette loi serait utile pour notre cas ? Si le modèle est bien ajusté, les résidus doivent se comporter comme un bruit gaussien. En supposant que les erreurs sont toutes indépendantes, de moyenne nulle et de variance unité, les résidus en sont une réalisation. Donc est une réalisation d'une loi du à degrés de liberté. Si est de l'ordre de , le modèle est cohérent. Sinon, le modèle ou les paramètres ajustés sont à revoir.
En pratique, les erreurs ne sont évidemment pas de variance unité et parfois pas indépendantes. Par contre on peut à bon droit supposer qu'elles sont de moyenne nulle. Pour se ramener au cas précédent, on calcule non pas une réalisation de mais de où , est sa transposée et est la matrice des variances-covariances de . Dans le cas où les sont indépendantes, la matrice des variances-covariances est diagonale, son -ème terme diagonal étant , soit l'inverse de la variance de .
La vraisemblance
Etant donné des paramètres , le modèle global est une variable aléatoire: il est somme d'une variable aléatoire valant avec une probabilité 1 et d'un vecteur de variables aléatoires gaussienne . A ce titre, il a une certaine densité de probabilité que l'on note . Le symbole | se lisant "sachant". La lettre L vient de Likelihood, qui veut dire vraisemblance en anglais. Il s'agit dans l'idée de la probabilité d'obtenir pour une valeur de donnée..
La fonction est souvent appelée "fonction de vraisemblance". La valeur de maximisant est appelé l'estimateur du maximum de vraisemblance. Il a de bonnes propritétés statistiques. En effet, on peut montrer que c'est un estimateur:
Non biaisé: lorsque le nombre de mesure tend vers l'infini, l'estimateur du maximum de vraisemblance tend vers la bonne valeur
De variance minimale: parmi les estimateurs non biaisés, il a la variance la plus faible que l'on puisse espérer.
Dans notre cas, si les sont des variables indépendantes, leur densité de probabilité jointe est égale au produit de leurs densité de probabilité. où est la densité de probabilité de la variable . De plus, si ces varibles sont gaussiennes et indépendantes, on a:
Méthode des moindres carrés
Pour des bruits gaussiens indépendants, maximiser la vraisemblance, revient à minimiser puisque est une fonction décroissante. La méthode consistant à minimiser s'appelle la méthode des moindres carrés. C'est la méthode d'estimation de loin la plus utilisée dans tous les domaines. Elle est parfois utilisée quand les bruits ne sont pas gaussiens, mais il faut garder à l'esprit qu'elle n'a alors plus de propriétés statistiques sympathiques (sauf quand le modèle est linéaire en .
Dans notre cas, les paramètres sont les éléments des orbites, les paramètres du bruit stellaire, du mouvement propre, etc. La fonction a donc de nombreux paramètres, et trouver son minimum global est une tâche ardue qui fait l'objet d'une littérature très vaste.
Lorsque le modèle est linéaire en i. e. où est une certaine matrice dépendant des instants d'observation , l'ajustement est beaucoup plus simple car il a une solution explicite (voir mini-projet). On essaye de se ramener autant que possible à des ajustements linéaires. La plupart du temps, on estime les paramètre les uns après les autres, puis un ajustement global est réalisé. Une démarche classique consiste à:
Ajuster le mouvement propre et la parallaxe, puis soustraire ces ajustements du signal initial
Chercher les périodes éventuelles dans le signal à l'aide du périogogramme (voir page suivante)
Si on trouve une période, on ajuste une orbite, que l'on soustrait du signal
On recommence les étapes 2 et 3 jusqu'à ce que le périodogramme ne présente plus de pic significatif
Sur la figure, on représente les étapes d'un ajustement d'un signal astrométrique simulé (2 planètes, 45 observations). De gauche à droite et de haut en bas:
Signal brut en rouge En vert signal après correction des bruits instrumentaux et atmosphériques . Le mouvement propre (tendance linéaire) et la parallaxe (oscillation) dominent très nettement le signal.
En vert: le signal planétaire réel, sans aucun bruit . En rouge: signal estimé en soustrayant le mouvement propre, l'accélération de perspective et la parallaxe au signal .
En rouge: signal . En vert : orbite d'une planète ajustée sur .
En rouge : signal dont on a soustrait . En vert :orbite d'une planète ajustée sur .
En rouge: signal . En vert: , ajustement de deux planètes en partant des estimations et .
En vert, signal . On ajuste tous les paramètres simultanément sur en partant des estimations précédentes. Le signal en rouge représente le signal planétaire de cet ajustement.
Exemple d'ajustement en astrométrie (données simulées)
Six étapes d'ajustement aux données. Pour représenter la chronologie des mesures, on trace des segments reliant deux points de mesure consécutifs.
Périodogramme
Evaluer les résidus sur une grille d'un modèle à paramètres, où chacun d'eux peut prendre valeurs recquiert évaluations, ce qui devient rapidement ingérable numériquement. Les planètes ont un mouvement périodique, donc il est raisonnable de checher des signaux périodiques dans le signal en ne faisant varier que la période du signal recherché. Pour des signaux échantillonnés à intervalles réguliers, on utilise la transformée de Fourier. Le périodogramme est un moyen de checher des signaux périodiques dans des données échantillonnées irrégulièrement. On les notera . Le périodogramme de Lomb-Scargle d'un signal échantillonné aux instants est défini comme suit pour une fréquence quelconque :
où vérifie:
Cette expression est équivalente à où et sont les paramètres minimisant . Le modèle est linéaire en , on a donc une solution explicite à la minimisation.
Le périodogramme a une propriété très intéressante: si le signal d'entrée est un bruit gaussien de variance unité, une valeur réelle fixée et une fréquence quelconque, la probabilité que dépasse est . En d'autres termes, la probabilité qu'une valeur du périodogramme à fixée soit "au moins aussi grand que " par hasard décroît exponentiellement. Supposons que l'on ait un signal où est un bruit gaussien de variance unité et nous trouvons un pic de taille , on calcule la probabilité de trouver un pic au moins aussi grand si le signal n'est composé que de bruit: . Si cette valeur est petite, on pourra confirmer la détection d'un signal avec une erreur de fausse alarme de . Ce procédé n'est autre qu'un test de signification statistique.
La figure montre un exemple de périodogramme. Il s'agit d'un périodogramme d'une des coordonnées d'un signal astrométrique simulé dont on a soustrait le mouvement propre et la parallaxe. En bleu, on représente un périodogramme idéal, sans bruit, avec 10000 observations. Le périodogramme représenté en rouge est lui calculé pour 45 observations. Le pic le plus haut correspond bien à une fréquence réelle. Par contre, le deuxième pic le plus important (à 0.37 rad/s) ne correspond pas à une sinusoïde. C'est ce qu'on appelle un alias de la fréquence principale.
En pratique, la variance du bruit n'est pas unitaire et dépend de l'instant de mesure. On peut corriger ce problème en minimisant un critère pondéré où est la variance du bruit à la mesure .
Exemple de périodogramme
En rouge: périodogramme d'un système simulé à deux planètes après soustraction du mouvement propre et de la parallaxe (signal très peu bruité), pour 45 mesures. En bleu: périodogramme du même système sans bruit et avec 10000 observations.
Se tester
Auteur: Nathan Hara & Jacques Laskar
Questions qualitatives
Expliquer avec la notion de signal sur bruit qu'avoir plus de mesures rend la détection plus précise.
Quels avantages et inconvénients a-t-on à utiliser un télescope au sol plus large dans le cas des vitesses radiales ? De l'astrométrie ?
La vitesse radiale par rapport à l'observateur ne dépend pas de la distance de l'étoile. Expliquer pourquoi l'observation d'un système planétaire donné est plus précise quand celui-ci est plus proche de l'observateur.
Pourquoi, à orbite fixée, les planètes plus massives sont plus faciles à détecter ?
Pourquoi, à masse fixée, les orbites plus proches de l'étoile sont plus faciles à détecter ?
Pourquoi, pour une planète donnée et un type d'étoile donné, plus l'étoile est massive plus la détection est difficile ?
Vous observez le spectre d'une étoile dont les oscillations radiales ont une période de 5 minutes, pourrait-on réduire l'influence de ce phénomène en choisissant un certain temps d'intégration ?
Voyez vous des biais détection possibles ?
Mini projet
But
L'objectif de ce mini projet est de réaliser un code permettant de calculer un périodogramme. On commence par établir la formule des moindres carrés dans le cas d'un modèle linéaire.
Moindres carrés linéaires
On se donne des observations et on considère une matrice réelle de taille avec et de rang . On veut calculer , minimisant . On pose matrice diagonale dont les éléments diagonaux valent et .
En termes vectoriels, . Comme on veut trouver le minimum de et que cette fonction est différentiable, ce minimum vérifie où est la différentielle de .
Montrer que la solution de est où désigne la transposition. Montrer que c'est un minimum global. (On pourra utiliser le fait que .
Périodogramme
Nous voulons trouver la sinusoïde qui a la distance minimale aux données au sens des moindres carrés. En d'autres termes, on veut ajuster où les sont des instants d'observation. Calculer avec la formule précédente minimisant . On notera
Implémentation
Dans le langage informatique de votre choix, écrire un programme permettant de:
Lire des données provenant d'un fichier texte et les mettre dans un tableau, en particulier extraire les instants d'observation, vitesses radiales et erreurs associées.
Calculer pour une fréquence donnée
Tracer pour allant de 0 à
Sur ce lien ou ce lien , copier coller le tableau de données dans un fichier texte et en faire l'analyse.
Bibliographie
Eriksson, U. & Lindegren, L. Astronomy and Astrophysics, Limits of ultra-high precision astrometry, 2007
Auteurs: Emmanuel Lellouch, Jean-Mathias Griessmeier, Quentin Kral
Transits d'exoplanètes
Ce chapitre présente la recherche et l'étude des exoplanètes par la méthode des transits. Il décrit les techniques d'observation, ainsi que les phénomènes observés et les paramètres déduits de ces observations concernant la planète, son environnement, sa structure interne et son atmosphère.
La lecture de ce cours demande quelques connaissances sur les atmopshères planétaires disponibles ici.
Décrire
Auteur: Emmanuel Lellouch
Définitions
Différents mots pour une variété de phénomènes
Vus depuis la Terre, les objets célestes peuvent passer les uns devant les autres, ce qui conduit à l’obscuration partielle ou totale de l'objet le plus lointain. Lorsque deux objets ont une taille apparente différente, le passage du plus petit devant le plus grand est appelé transit . Celui du plus grand devant le plus petit est appelé occultation ou plus improprement éclipse .
Dans le système solaire
Jupiter
Phénomènes mutuels des satellites de Jupiter
Dans le système solaire, les transits les plus courants sont ceux des satellites galiléens devant Jupiter, ainsi que leurs transits, occultations et éclipses mutuels. Dans le cas de Jupiter, lorsque la planète est proche de son équinoxe (tous les 5.5 ans environ), on peut observer les phénomènes mutuels de ses satellites galiléens, parmi lesquels on distingue entre transits, occultations et éclipses.
Mercure et Vénus
Transit de Vénus
Transit de Vénus de 2012 observé dans une bande H alpha, qui montre les tâches solaires et le filaments.
Moins fréquents mais plus connus sont les transits de Mercure (13 ou 14 fois par siècle) et Vénus (2 fois, séparées de 8 ans, tous les 243 ans) devant le Soleil.
Le Soleil et la Lune
En principe, le terme éclipse (littéralement : privation de lumière) devrait être réservé aux situations dans lesquelles un corps passe dans l’ombre d’un autre et non derrière lui. Il est ainsi employé correctement lorsqu’on parle d’une éclipse de Lune – la Lune passant dans l’ombre de la Terre – mais improprement lorsqu’on parle d’une éclipse de Soleil, ce phénomène devant en toute rigueur être appelé occultation du Soleil par la Lune .
Le système solaire extérieur
Les planètes et petits corps du système solaire extérieur, très peu lumineux, passent assez souvent devant des étoiles du fond de ciel plus brillantes qu'eux. Ces occultations d'étoiles, comme les "ombres chinoises" révèlent des informations inaccessibles autrement.
Quelques-uns des résultats obtenus grâce à ces phénomènes sont décrits ci-dessous.
Hors du système solaire
hst-hd209458.png
Transit de la planète HD 209458 b, observé par le Télecope Spatial
Crédit :
NASA
En sciences exoplanétaires, la méthode des transits consiste à mesurer les timings et l’ensemble des phénomènes observables lors du passage apparent d’une planète devant (figure ci-jointe- et derrière son étoile-hôte, lorsque ceux-ci se produisent en raison d’une orientation favorable de l’orbite planétaire (nous parlerons ci-après d’une planète transitante). Comme on le verra en détail, ces observations fournissent des informations irremplaçables sur la taille de la planète, ses caractéristiques orbitales, la structure et la composition de son atmosphère, voire la présence éventuelle de planètes supplémentaires dans le système.
Le passage de la planète derrière l’étoile (stricto sensu son occultation) est dans la littérature le plus souvent désigné par « transit secondaire » voire « éclipse secondaire », ou «anti-transit». Dans ce qui suit, on utilisera les termes transit (ou transit primaire) et éclipse secondaire pour le passage d’une planète devant et derrière l’étoile. L’observation de la planète hors transit, c’est-à dire dans la période de temps située entre le transit et l'éclipse secondaire fournit elle aussi des renseignements très intéressants sur la planète.
Des phénomènes riches d'enseignements
Roemer
Gravure de l'article de Rømer dans le JOURNAL DES SCAVANS de l'orbite de Io (en haut) observée de la Terre (en bas). L'article rapporte les 8 années d'observation et la conclusion que la lumière ne se propage pas instantanément.
L'enregistrement du passage de l'astéroïde Chariklo devant une étoile a révélé la présente de deux anneaux.
Crédit :
L. Maquet
Dans différentes branches de l’astrophysique, l’observation de ces phénomènes de masquage ont donné historiquement des résultats scientifiques majeurs. Il y a exactement 400 ans, la mesure du timing des éclipses de Io par Jupiter a conduit le Danois Ole Rømer à la première estimation de la vitesse de la lumière (figure ci-jointe).
L’observation des transits de Vénus depuis différents points de la Terre a permis de calibrer les distances dans le système solaire (c’est-à-dire de mesurer l’unité astronomique) en employant la méthode des parallaxes. Elle a aussi fourni les premières indications sur la présence d’une atmosphère autour de Vénus (transit de 1761).
Les observations des éclipses de Soleil, qui permettent d’isoler la chromosphère, ont fourni de très nombreux résultats, parmi lesquels on se bornera à citer ici la découverte de l’hélium (1868), et la confirmation de la prédiction d’Einstein sur la déflection gravitationnelle de la lumière (1919) en comparant la distance apparente entre des étoiles selon que le Soleil était absent du champ ou présent (i.e. pendant une éclipse de Soleil).
Même si on se limite au système solaire, ces phénomènes continuent à fournir des informations majeures. La mesure des positions précises des satellites de Jupiter grâce aux phénomènes mutuels a permis de reconstituer leur mouvement orbital avec une précision suffisante pour en déduire le taux de dissipation d’énergie lié aux forces de marée dans l’intérieur de Io.
Dans des situations géométriquement semblables à celle des exoplanètes, la spectroscopie de Mercure et Vénus lors des transits récents devant le Soleil, et de Io en transit devant Jupiter, ont fourni de nouvelles information sur la composition et la structure de leurs atmosphères.
Un outil puissant d’étude des objets du système solaire lointain (objets trans-neptuniens) est fourni par la méthode de l’occultation stellaire : elle permet, par mesure du temps d’occultation – c’est-à-dire le temps de disparition de l’étoile derrière l’objet – la détermination de leur taille avec une précision (de l’ordre du kilomètre) inégalable par d’autres techniques. Les systèmes d'anneaux d'Uranus, de Neptune, du Centaure Chariklo (figure ci-jointe) et du transneptunien Haumea ont été découverts grâce à de telles occultations stellaires. Cette même technique permet de mesurer et de suivre l’évolution temporelle de la pression à la surface d’un objet comme Pluton.
Paramètres planétaires accessibles
Paramètres planétaires
L'observation des transits donne accès à des informations sur
Figure 1 : Géométrie de l’orbite d’une planète transitante. Nous utilisons ici le terme éclipse secondaire pour désigner le passage de la planète derrière l’étoile, i.e. l’occultation.
Crédit :
A traduire
La figure ci-jointe montre schématiquement la géométrie d’observation d’une exoplanète transitante. L’observable la plus directe est la mesure de la variation de flux pendant le transit primaire et l'éclipse secondaire. Hors transit, le flux mesuré correspond à la somme du flux de l’étoile et celui de la planète . Pendant l'éclipse secondaire, le flux mesuré est restreint à .
Pendant le transit primaire, une fois que la planète est entièrement devant le disque de l’étoile, une fraction de la surface de l'étoile est cachée, , où et sont respectivement le rayon de l'étoile et de la planète. Le flux de lumière de l'étoile est réduit d'une fraction δ. Comme la planète est devant l’étoile, elle nous présente sa face non-éclairée, donc sa contribution au flux observé est nulle. En conséquence, le rapport du flux mesuré pendant le transit primaire à celui mesuré pendant l'éclipse secondaire (ou en pratique à celui mesuré à n’importe quel moment hors du transit) donne directement le rapport du rayon de la planète à celui de l’étoile.
Transit de planètes du système solaire
Question 1)
Calculez la baisse de luminosité du Soleil dû à un transit de Jupiter, de la Terre.
Le Soleil a un rayon de et Jupiter a un rayon de . La Terre a un rayon de .
Les petites étoiles favorisent la détection de transits
L'exercice ci-dessus montre que le transit de Jupiter devant le Soleil conduit à une baisse de luminosité de celui-ci de 1.05%. Pour la Terre passant devant le Soleil, l’assombrissement relatif n’est que de 0.0084%.
La perte de flux mesurée pendant l'éclipse secondaire dépend elle non seulement du rapport , mais également du rapport de l’intensité lumineuse spécifique (i.e. pour une surface donnée) émise par les deux objets. Comme on le verra plus loin, il dépend de de la longueur d’onde, et selon celle-ci, des températures de la planète et de l’étoile, ou de l’albédo de la planète.
L’expression de la perte de flux au moment du transit montre que la détection d’un transit d’une exoplanète de rayon donné autour d’une étoile naine (de type M) est plus favorable qu’autour d’une étoile de type solaire ou d’une étoile géante. Par exemple, l’étoile Kepler- 42 a un rayon égal à 0.17 rayon solaire (120 000 km). Elle abrite 3 planètes, dont la plus petite (Kepler-42 d), a un rayon de ∼0.57 rayon terrestre, ce qui donne un signal photométrique de l’ordre de 0.1%, plus de dix fois plus fort que la Terre devant le Soleil.
Orbite : Période et excentricité
La grande puissance de la méthode des transits résulte de la reproductibilité du phénomène. Un système transitant peut être observé autant de fois que l’on souhaite, avec à chaque fois les mêmes caractéristiques en termes de timing et de profondeur de transit, ce qui permet l’accumulation de la précision sur ces deux paramètres. La précision sur la mesure des instants de transits est riche d’enseignements.
Dans le cas d’une orbite circulaire de période P, un transit et l'éclipse secondaire adjacente sont séparés temporellement de P/2. Ce n’est plus le cas pour une orbite elliptique, et la mesure de ces séparations temporelles (transit-éclipse et éclipse-transit) donne une information sur l’excentricité de l’orbite; plus précisément, elle contraint le produit e cos (ω), où e est l’excentricité et ω l’argument du périastre.
La mesure des durées relatives du transit et de l'éclipse secondaire fournissent aussi des contraintes sur ces paramètres, mais avec moins de précision, eu égard à la courte durée des transits par rapport à leur périodicité.
Au-delà même de la caractérisation statistique des orbites planétaires, l’intérêt physique de ces mesures d’excentricité est grand. Ainsi, pour les planètes proches de leur étoile, les effets de marée associés aux orbites elliptiques produisent un chauffage interne qu’il est possible d’estimer, fournissant des contraintes sur la structure thermique des objets.
Par ailleurs, s’agissant de la connaissance de la période orbitale et des instants de transit et d’éclipse, la méthode des transits est presque toujours plus précise que la méthode des vitesses radiales. Pour autant, ces paramètres interviennent dans l’interprétation des courbes de vitesse radiale (ce sont 3 des 6 paramètres libres associés à cette méthode), donc leur connaissance indépendante via les transits a un grand intérêt pour l’amélioration de la précision sur les autres.
Orbite : Orientation
Orientation de l'orbite
Figure 2 : Transit d’une exoplanète en présence de rotation stellaire. La planète masque d’abord des régions émettant vers le bleu, puis vers le rouge. La dernière ligne montre l’évolution de la vitesse radiale mesurée pour l’étoile pour différentes orientations de l’orbite planétaire. Dans les trois situations montrées, la durée du transit est la même de sorte que la simple observation photométrique du transit ne pourrait les distinguer.
Crédit :
A traduire
Une exoplanète qui transite devant son étoile possède une orientation favorable pour la spectroscopie des vitesses radiales : L'étoile et la planète tournent autour de leur centre de gravité. Au moment du transit planétaire, l'étoile est à son point le plus éloigné de la Terre (i.e. l'observateur) et sa vitesse Doppler s'annule.
S’y rajoute un effet subtil : en raison de sa rotation propre, le rayonnement d’une partie de l’étoile est décalé vers le bleu, l’autre vers le rouge (Fig. 2). Si la planète a une orbite prograde (dans le même sens que la rotation stellaire), elle masque d’abord des régions de l’étoile émettant un rayonnement décalé vers le bleu (zones grisées sur la Fig. 2), puis vers le rouge (zones claires). En conséquence, par rapport à sa valeur mesurée au centre du transit, la vitesse radiale globale de l’étoile est d’abord décalée vers le rouge, puis vers le bleu. C’est ce que l’on appelle l’effet Rossiter- McLaughlin. L’effet est loin d’être faible: en raison des fortes vitesses de rotation stellaires (typiquement 2 km/s pour le Soleil), il peut se chiffrer en quelques dizaines de mètre par seconde – soit souvent plus que la vitesse Doppler de l’étoile liée à la planète.
L’évolution du décalage Doppler de l’étoile pendant le transit permet alors non seulement de confirmer l’existence du transit, mais aussi de déterminer l’orientation de l’orbite planétaire, à savoir l’angle entre le plan orbital et l’axe de rotation de l’étoile (angle appelé obliquité de l’étoile).
Cette méthode a mis en évidence de nombreux cas de tels désalignements spin-orbite, voire d’orbites planétaires rétrogrades. L’origine de ces désalignements reste mal comprise, mais est sans doute liée à des phénomènes d’interaction, magnétique entre la jeune étoile et le disque proto-stellaire, ou gravitationnelle avec des compagnons stellaires au moment de la formation, qui auraient pu faire « basculer » l’axe de rotation stellaire. Une autre hypothèse serait que l’axe de rotation de l’étoile représente bien la direction perpendiculaire au plan du disque primordial, et que c’est le système planétaire dont le plan orbital a changé depuis sa formation.
Orbites perturbées
Orbites non kepleriennes et planètes additionnelles
TTV
TTV de l'étoile KOI 872 (Kepler-46)
Crédit :
D. Forgan
Kepler-88
La planète Kepler-88b transite devant l'étoile Kepler-88. La planète Kepler-88c a été décourverte par les perturbations induites sur les instants des transits.
Crédit :
A. Santerne
De manière encore plus fine, la précision extraordinaire qui peut être atteinte sur les instants de transits peut révéler des cas d’orbites non-képleriennes. Ces situations peuvent résulter d’effets relativistes, de forces de marée liées à l’étoile, ou de perturbations associées à des forces gravitationnelles dues à des objets supplémentaires dans le système (deuxième étoile, planète additionnelle, etc.). Elles se manifestent par des variations sur les timings des transits primaire et secondaire, soit sur le long terme, ce qui peut indiquer une précession de l’orbite, soit à plus court terme, dans le cas de perturbations par des planètes non nécessairement transitantes dans le système.
Les planètes sur des orbites résonantes, c’est-à-dire présentant des commensurabilités de leurs périodes – produisent des variations particulièrement grandes des instants des temps de transit (figure ci-jointe). Cette effet est appelé TTV (transit time variation). L’ « inversion » des données de TTV en termes de propriétés (masse et orbite) des planètes perturbatrices est souvent « dégénérée » (i.e. n’a pas de solution unique), mais dans certains cas, une solution non-ambigüe peut être obtenue. Le plus souvent, l’ordre de grandeur des TTV est une très faible fraction de la période orbitale.
Un cas remarquable est celui de l’exoplanète Kepler-88b, une planète de 9 masses terrestres, qui présente des TTV de 12h d’amplitude, pour une période orbitale de 11 jours. Il a été prédit qu’ils étaient causés par une planète perturbatrice non-transitante de 0.7 masses de Jupiter, qui est ensuite été détectée par vélocimétrie radiale !
Un système extraordinaire : TRAPPIST-1
Transit triple de planètes de TRAPPIST-1
Courbe de lumière pour un transit triple des planètes TRAPPIST-1c, TRAPPIST-1e, et TRAPPIST-1f. La configuration des planètes (jaune, rouge, vert) à trois instants particuliers est indiquée en bas.
Crédit :
Gillon et al. 2017.
TRAPPIST-1 versus Jupiter
Taille comparée du système de 7 planètes TRAPPIST-1 avec le système des lunes galiléennes de Jupiter et le système solaire interne.
Crédit :
tréduire
Tout récemment (22 février 2017), un système exceptionnel de 7 planètes, toutes transitantes, a été découvert autour d’une étoile naine (rayon = 0.11 rayons solaires, masse= 0.08 masses solaires) ultra-froide (2550 K) appelée TRAPPIST-1 et située à 40 années-lumière. Les périodes orbitales (de 1.5 à 20 jours) sont telles que plusieurs de ces planètes peuvent transiter en même temps, et même s’occulter mutuellement pendant le transit, ce qui conduit à des courbes lumières d’une superbe complexité (Fig. ci-jointe).
Les tailles (Rp = 0.75 à 1.1 rayons terrestres) et masses (0.85 à 1.38 masses terrestres, mesurées par la méthode des TTV) indiquent clairement des planètes telluriques et trois d’entre elles pourraient avoir une température compatible avec l’eau liquide. Le système dans son ensemble (0.063 UA pour la planète la plus externe) tiendrait aisément dans l’orbite de Mercure, et apparaît comme un cas intermédiaire entre le système des satellites galiléens de Jupiter et celui du système solaire interne (Fig. ci-jointe).
Atmosphère: composition et dynamique - I
Structure verticale - transit primaire
Dans ce qui précède, nous n’avons parlé de d’observations photométriques des transits – c’est-à-dire dans une seule bande de longueur d’onde (outre la description de l’effet Rossiter-McLaughlin). Par ailleurs, nous avons implicitement supposé que la planète a un « bord net », de sorte qu’on pouvait parler de son « rayon » sans ambiguÏté. La réalité est plus floue. Les planètes géantes n’ont pas de surface solide bien définie, et même une planète tellurique peut posséder une atmosphère, qui influence la manière dont la lumière stellaire est absorbée pendant le transit. Concrètement, l’absorption préférentielle de la lumière à certaines longueurs d’onde par les gaz et/ou aérosols/nuages rend le « rayon d’absorption » de la planète plus grand à ces longueurs d’onde. Du coup, la mesure spectroscopique du transit, c’est-à-dire la variation de la profondeur d’absorption du transit en fonction de la longueur d’onde, permet d’obtenir des informations sur la composition de l’atmosphère, voire sa dynamique. Nous verrons plus loin les équations générales régissant ces principes. Notons que cette spectroscopie de transmission peut être effectuée dans tout l’infrarouge et jusqu’à l’ultraviolet, ce qui permet en principe de sonder une vaste gamme verticale de niveaux dans l’atmosphère, allant des troposphères (pression de plusieurs bars) jusqu’aux thermosphères/exosphères (nanobar).
Atmosphère: composition et dynamique - II
Structure verticale-transit secondaire
De même, il est extrêmement intéressant d’observer par spectroscopie l'éclipse secondaire. Comme on l’a vu, la différence entre le flux mesuré juste avant ou après le passage de la planète derrière l’étoile et celui mesuré pendant l'éclipse secondaire donne le rayonnement provenant de la planète elle-même (pour être précis, du côté éclairé de la planète). Selon le domaine de longueur d’onde, ce rayonnement planétaire peut-être de nature stellaire réfléchie ou thermique.
La première composante, qui domine dans le visible et le proche infrarouge, correspond à la lumière de l’étoile réfléchie par la planète. Le rayon étant approximativement connu par l’observation du transit, l’intensité de ce rayonnement réfléchi fournit l’albédo de la planète. Ce dernier résulte de la compétition entre les propriétés réfléchissantes/diffusantes et absorbantes de l’atmosphère (voire de sa surface). Pour une planète avec une atmosphère épaisse, les variations spectrales de l’albédo sont dues aux variations de ses propriétés de diffusion (par les gaz et/ou les nuages atmosphériques) avec la longueur d’onde, mais peuvent aussi faire intervenir la composition gazeuse (des espèces atomiques comme le sodium ou le potassium ont des raies d’absorption très fortes dans le visible). Comme on verra, la grande difficulté de la mise en œuvre de cette technique résulte dans la très faible intensité du signal planétaire à extraire.
Le domaine thermique, lui, correspond au rayonnement propre de l’atmosphère de la planète. Celui-ci dépend à la fois de la structure thermique verticale (la variation de la température avec la pression dans l’atmosphère de la planète) et des profils verticaux d’abondance des gaz – qui définissent le profil vertical de l’opacité atmosphérique. En termes de composition atmosphérique, la mesure du spectre thermique apparaît donc complémentaire de celle du spectre en transmission mesuré pendant le transit. Cette complémentarité reflète notamment le fait que les deux méthodes ne sondent pas les mêmes régions atmosphériques : le transit est sensible à la composition du limbe de la planète – i.e. les régions où la lumière stellaire est rasante (« terminateurs ») alors que l’émission thermique sonde le côté jour de la planète.
Par ailleurs, à une longueur d'onde donnée, le transit sonde des régions plus ténues de l'atmosphère que l'émission thermique.
Atmosphère: composition et dynamique - III
Chimie de l'atmosphère
A ce jour (janvier 2017), la spectroscopie des transits a permis de détecter un petit nombre d’espèces chimiques dans certaines exoplanètes (~20 objets en tout), parmi lesquelles les molécules H2O, CO2, CO, CH4, et les espèces atomiques H, C, O, Na, K. De manière très générale, l’intérêt de ces mesures est double, permettant (i) d’en déduire la composition élémentaire (par exemple le rapport C/O), qui donne des contraintes sur les processus de formation de ces objets (ii) de caractériser les processus physiques (photochimie, condensation, thermochimie à l’équilibre ou hors-équilibre, transport vertical, échappement atmosphérique...) qui gouvernent les atmosphères. L’étude des spectres exoplanétaires renseigne aussi sur la présence de nuages dans leurs atmosphères, dans la mesure où des nuages diffusants ou absorbants à haute altitude masquent les absorptions moléculaires attendues.
Atmosphère: composition et dynamique - IV
Courbe de phase
Transits et courbe de phase de HD189733 b
Figure 3 : Transit, éclipse secondaire, et courbe de phase de la planète HD 189733 b, observés à une longueur d’onde de 8μm avec le télescope spatial infrarouge Spitzer. Les courbes sont normalisées au flux stellaire (1.000 pendant l'éclipse secondaire).
Le transit (à la phase 0.0) fait environ 2.1% de profondeur, ce qui indique un rapport des rayons de 1.0%. L'éclipse secondaire (phase 0.5) indique que le côté jour de la planète émet 0.3% du rayonnement stellaire à cette longueur d’onde, impliquant une température d’environ 1210 K. La figure du bas (zoom vertical de celle du haut) montre la courbe de phase. Après modélisation, celle-ci indique que la température du côté nuit est d’environ 970 K, « seulement » 240 K plus froid que sur le côté jour, ce qui implique une forte redistribution de la chaleur par la dynamique atmosphérique. D’après Knutson et al. 2007.
Crédit :
à traduire
La figure montre qu’au cours de sa révolution autour de l’étoile, une exoplanète présente différentes phases : côté nuit au moment du transit, côté jour juste avant/après l'éclipse secondaire, et à l’instar de la Lune, des phases de croissant/quartier tout au long de l’orbite.
Le suivi de l’émission thermique avec la position de la planète sur son orbite – et ceci est vrai même pour une planète ne transitant pas – permet ainsi de mesurer les variations spatiales – en l’occurrence les variations avec l’heure locale pour une orbite circulaire – des propriétés atmosphériques. Ces courbes de phase renseignent principalement sur la variabilité diurne des températures atmosphériques. Par exemple, on pourrait s’attendre à ce que les Jupiter chauds, qui, dus aux effets de marée, sont en rotation synchrone autour de leur étoile, présentent des écarts de températures gigantesques entre les côtés éclairé et sombre. Ce n’est en fait souvent pas le cas (voir exemple sur la figure ci-jointe), ce qui implique une forte redistribution de la chaleur par des vents atmosphériques. Il est également généralement observé que le maximum de température ne se produit pas au midi local, mais est décalé vers les zones « de l’après-midi », ce qui s’explique par des effets d’inertie thermique.
Une méthode complémentaire consiste à résoudre temporellement l'éclipse secondaire dans le domaine thermique : la disparition progressive derrière l’étoile de la planète permet de déterminer successivement les températures de « tranches de planète » correspondant à des heures locales différentes, et ainsi d’établir une carte de températures.
La spectroscopie des transits donne enfin potentiellement un accès direct à la vitesse des vents atmosphériques. En effet si une molécule est détectée par spectroscopie du transit, la mesure précise de la longueur d’onde des raies planétaires peut éventuellement indiquer des décalages spectraux diagnostics de vitesses de vent. Ainsi, un décalage vers le bleu des raies de CO dans le cas de HD209458b a été interprété comme la signature de vents jour-nuit de l’ordre de 2 km/s. Des complications liées à la connaissance précise de l’orbite de la planète peuvent toutefois survenir. Dans un cas, il a aussi été possible de mesurer la période de rotation propre d’une exoplanète (β-Pictoris b) à partir de la largeur des raies de CO.
Environnement planétaire accessible
Transit de satellites
Nous n’avons ci-dessus parlé que de transits de planètes devant des étoiles. Le phénomène peut être généralisé au transit d’autres objets de nature planétaires, tels que : satellites, astéroïdes/comètes, anneaux.
Un satellite d’une exoplanète transitante doit généralement lui-même transiter et peut donc en être détecté directement par une allure particulière des courbes ingress/egress. Même si le satellite est trop petit pour être observé directement, un autre effet potentiellement détectable serait la mesure de TTV, dues au fait que la position de la planète oscille autour du centre de masse planète-satellite. Les données de transit de la planète Kepler-1625 b ont montré la premiètre trace de présence d'un exo-satellite, appelé Kepler-1625 b I
Transit de comètes
En revanche, on connaît deux cas de systèmes exoplanétaires avec transits de comètes. Le plus célèbre et le premier découvert est celui du disque de débris de l’étoile β-Pictoris, dont le spectre présente des raies atomiques (Ca II par exemple) variables temporellement, qui sont interprétées comme la signature de comètes en évaporation passant devant l’étoile. L’analyse statistique de ces signatures prouve qu’il existe deux familles de comètes différant par leur type d’orbite. A noter que le système de β-Pictoris possède également une planète géante (β-Pictoris b), découverte par imagerie directe, d’environ 7 masses de Jupiter, de période 22 ans. La recherche de son éventuel transit n'a, pour le moment rien donné.
Des transits de comètes devant une étoile (transit par le noyau cométaire et pas signature spectrale du nuage comme dans le cas de β-Pictoris) ont été détectés par Kepler en 2017.
Transit d'anneaux
Transit d'anneaux
Figur 4 : Modèle et courbe de transit du système SWASP-J1407. La planète (point au centre) est détectée par vitesse radiale mais ne transite pas. Elle est en revanche entourée d’anneaux géants qui transitent devant l’étoile en 56 jours. La bande verte indique le parcours de l’étoile relatif aux anneaux pendant le transit. Les anneaux présentent un « vide » aux 2/3 environ de leur extension, ce qui pourrait indiquer l’existence d’une lune.
Crédit :
à traduire
Enfin, on a découvert le cas exceptionnel d’une exoplanète qui semble entourée d’anneaux (1SWASP J1407 b ; compte tenu de sa masse, environ 20 masses de Jupiter, il pourrait s’agir d’une naine brune). Ces anneaux, dont l’existence est attestée par leur transit devant l’étoile (Fig. 4), constituent un système géant (rayon ~90 millions de km, soit 200 fois les anneaux de Saturne) et pourraient abriter une masse totale d’environ 1 masse terrestre. Un modèle invoquant 37 anneaux distincts permet de reproduire la courbe du transit, qui dure 56 jours. A noter que le modèle présente une zone vide d’anneaux à environ les 2/3 du rayon total, peut-être la conséquence d’une lune de ~1 masse terrestre.
Comprendre
Auteur: E. Lellouch
Des événements rares
Probabilité de transit
L’une des limitations les plus importantes de la méthode est la faible probabilité qu’une exoplanète donnée passe devant ou derrière son étoile-hôte. Il faut en effet pour cela que l’observateur se trouve pratiquement dans le plan orbital de la planète (orbite vue « par la tranche »).
Considérons une planète découverte par vitesse radiale et dont l’orientation de l’orbite est inconnue. Pour qu’elle transite devant son étoile, en notant l’inclinaison entre la normale au plan orbital et la ligne de visée, il faut que l’on ait la relation : , où et sont les rayons de l'étoile et de la planète, est la distance projetée entre l’étoile et planète au moment où celle-ci est au plus proche de l’observateur. Compte tenu que la planète est toujours beaucoup plus petite que l’étoile, et en se limitant pour simplifier au cas d’une orbite circulaire de demi-grand axe a, on peut montrer que la probabilité de transit et celle d'éclipse secondaire sont toutes deux égales à . Ceci prouve le résultat intuitif que la probabilité de transit est plus grande pour les planètes les plus proches de leur étoile.
Recherche au hasard
Détectabilité des planètes par transit
Quelle est la probabilité, pour un extraterrestre, de détecter par transit,
Question 1)
- la Terre ? - Jupiter? - une planète à 0.05 UA d’une étoile de type solaire?
Le Soleil a un rayon de . L'orbite de la Terre a un rayon de soit 1 U.A. (Unité Astronomique). L'orbite de Jupiter est à 5.2 U.A.
Cette probabilité peut se traduire en termes du nombre moyen d’étoiles qu’il faut observer pour espérer découvrir une exoplanète transitante à un rayon orbital donné. Si on note η la fraction des étoiles possédant une telle planète, ce nombre est de l’ordre de ∼. Par exemple, les « Jupiters chauds » ont une distance type à leur étoile de 0.05 UA, et concernent environ 1 % des étoiles. Ceci donne p ∼0.1 et N ∼1000.
Même dans ce cas très favorable (planète proche), on voit que la recherche d’exoplanètes nouvelles par transit nécessite l’observation en aveugle de grands échantillons.
L'exercice ci-dessus montre que la probabilité de détecter la Terre par transit n'est que de 0.45%. Pour Jupiter, la probabilité est de 0.09%. En revanche, pour une planète à 0.05 UA autour d’une étoile de type solaire, la probabilité atteint 9 %. Les probabilités de transit et d'éclipse secondaire peuvent différer lorsque l’orbite planétaire est d’excentricité non-nulle (elliptique) de sorte qu’il est en principe possible d’observer un transit primaire sans transit secondaire et vice-versa.
Temps des transits
Géometrie détaillée d'un transit
Temps
Figure 5 : Géométrie d’un transit. δ est la profondeur du transit, b le paramètre d’impact, T la durée du transit et τ la durée de l’ingress.
Crédit :
à traduire
La géométrie d’un transit est représentée sur la Fig. 5.
Appelons à les 4 « temps de contact », c’est-à-dire les instants auxquels les disques de la planète et de l’étoile sont tangents. L’instant moyen de l’entrée (du disque planétaire devant le disque stellaire) est ; de même l’instant moyen de la sortie (du disque planétaire) est . L’intervalle de temps séparant ces deux instants, noté T, est par définition la « durée du transit », alors que et sont respectivement la durée de l’entrée et de la sortie. On note également b le « paramètre d’impact », i.e. la distance minimale – exprimée en fraction de rayon stellaire – entre la position apparente de la planète et le centre de l’étoile.
Durée du transit
Avec ces définitions, en se limitant au cas des orbites circulaires et en faisant les approximations raisonnables suivantes : , et (transit non-rasant), on peut montrer que la durée du transit est égale à :
où , P étant la période orbitale.
Par ailleurs, , où
En combinant l’expression de ci-dessus avec la 3eme loi de Kepler, et en se ramenant au cas du système solaire, on obtient
expression dans laquelle la seconde parenthèse représente le rapport de la densité de l’étoile à celle du Soleil. Ainsi, vu depuis une autre étoile, le transit de la Terre devant le Soleil ne dure que 13 h une fois tous les ans, et celui de Jupiter ne dure que 30 h une fois tous les douze ans, ce qui illustre à nouveau la rareté du phénomène. Bien évidemment, la mesure de la période requiert l’observation d’au moins deux transits.
Mise en oeuvre de la méthode
Différents objectifs scientifiques
Les expressions ci-dessus montrent que les transits sont des événements a priori rares, puisque seule, une faible fraction des exoplanètes transitent, et parmi celles-ci, seulement pendant une faible fraction de leur période orbitale.
Il faut donc distinguer entre les différents objectifs suivants: (i) la recherche d’exoplanètes, qui comme on l’a vu nécessite l’observation de grands échantillons (ii) le suivi photométrique de systèmes planétaires découverts en vélocimétrie radiale pour voir s’ils donnent lieu à des transits (iii) la caractérisation d’exoplanètes transitantes, notamment par spectroscopie.
Equipement
De par sa simplicité, la méthode est en principe accessible avec un équipement modeste, puisqu’au premier ordre il s’agit simplement (sauf pour le troisième objectif) de suivre photométriquement une étoile qui peut être relativement brillante. De fait, le premier transit d’exoplanète (celui de HD209458b, dont l’étoile a une magnitude ∼ 8) fut observé depuis le sol, en 2000, à l’aide d’un simple télescope de 25 cm, doté d’une caméra CCD. De nombreux programmes de recherche de transits au sol ont été développés, tels que TrES, XO, HAT, SuperWASP, avec des télescopes de ∼10 cm qui font des relevés sur des étoiles de magnitude 10 à 12, ou OGLE, avec un télescope de 1 m pour des étoiles de magnitude 14-16. A ce jour (fin 2016), ces relevés depuis le sol ont permis de découvrir environ 250 exoplanètes, notamment avec SuperWASP et HAT.
Comme on l’a vu plus haut, le transit d'une planète géante (resp. tellurique) autour d’une étoile de type solaire produit typiquement un signal photométrique de 1 % (resp. 0.01 %). En raison de la turbulence atmosphérique, les planètes telluriques ne sont pas à la portée des observations au sol, sauf autour des étoiles naines. Ce problème est éliminé par l’emploi d’observations depuis l’espace, qui ont en outre l’avantage de s’affranchir des aléas de la météo et des interruptions jour-nuit. Dans tous les cas, l’extraction des signaux planétaires requiert des techniques élaborées de photométrie de haute précision, excluant au maximum les erreurs systématiques éventuelles. Les projets spatiaux CoRoT et Kepler et leurs résultats sont décrits ci-après.
Difficultés de la méthode
Variabilité stellaire
La description faite plus haut de la perte de flux pendant un transit suppose que le flux stellaire est indépendant de la position sur l’étoile et constant dans le temps. Dans la réalité, le rayonnement stellaire est généralement caractérisé par un assombrissement centre-bord, lié au fait que le rayonnement au limbe provient d’un niveau plus élevé, et par conséquent plus froid, dans l’atmosphère de l’étoile, que celui au centre. En conséquence, l’atténuation du rayonnement de l’étoile lors d’un transit planétaire n’est pas purement géométrique.
Aux longueurs d’onde où l’assombrissement centre-bord est important, les courbes de lumière apparaissent ainsi plus « piquées » (c’est-à-dire moins plates) près de leur centre, puisque la planète masque alors une zone de rayonnement plus intense.
De manière plus générale, les étoiles présentent des hétérogénéités locales de flux, associées notamment aux tâches stellaires liées à l’activité de l’étoile. Leur masquage pendant le transit peut conduire à des irrégularités dans le profil d’atténuation de l’étoile, ce qui compliquera la détermination du rayon planétaire. Ces problèmes sont particulièrement sérieux dans le cas des étoiles géantes et sous-géantes. L’activité stellaire, qui induit une variation temporelle du flux total émis par l’étoile, peut aussi conduire à des courbes de lumières non parfaitement reproductibles dans le temps.
Faux positifs
Faux positifs
Figure 6 :Transit d’une exoplanète devant son étoile (a), et trois types de « faux positifs » : (b) Transit d’une naine brune ou d’une étoile de très faible masse (c) transit d’une binaire à éclipse en présence d’une étoile brillante dans un système triple (d) transit rasant d’une binaire à éclipse. Au premier ordre, toutes ces situations donnent des courbes de lumières semblables.
Crédit :
à traduire
Une faible atténuation temporaire et reproductible du flux stellaire peut sembler être la signature non-ambiguë d’un passage planétaire. Pourtant, il existe d’autres situations pouvant conduire au même type de signal (Fig. 6), telles que :
le transit rasant d’une étoile dans un système binaire à éclipses
le cas d’un système triple incluant une étoile brillante et une binaire à éclipses peu lumineuse : dans ce cas, l’effet du transit « normal » dans la binaire à éclipses est fortement dilué par la présence de l’étoile brillante, ce qui donne au phénomène l’apparence d’un transit planétaire de faible profondeur. Une variante de cette situation est le cas où la binaire à éclipse et l’étoile brillante ne font pas partie d’un système triple, mais se trouvent dans un alignement de circonstance.
Enfin, même dans les cas où on peut établir qu’il s’agit bien du transit d’un objet unique devant l’étoile étudiée, il faut encore prouver que l’objet en transit est bien une planète : en effet, les étoiles de faible masse (<10% de la masse du Soleil) et les naines brunes ont des rayons comparables à celles d’une planète géante comme Jupiter, et ne s’en distinguent que par leur masse bien plus élevée.
Débusquer les faux positifs
Il y a différentes manière de débusquer ces « faux positifs ». Ainsi les cas des transits rasants peuvent être identifiés par leur forme plus piquée (en « V ») que celle des transits planétaires (en « U »). Par ailleurs, comme on l’a vu plus haut, la durée du transit donne une mesure de la densité de l’étoile-hôte ; une solution aberrante (c’est-à-dire incohérente avec celle que l’on peut estimer à partir de la température de l’étoile) indiquera qu’il ne s’agit pas d’un transit planétaire. Enfin, pour distinguer entre une véritable planète et un objet sous-stellaire de même rayon, le seul moyen est de déterminer la masse de l’objet par vélocimétrie radiale. L’étude (et l’élimination) des faux positifs est fondamental pour les études statistiques de population planétaire. Ce taux s’avère important et fortement dépendant des types de planètes. Par exemple, dans le cas des données Kepler, il est de l’ordre de 10 à 20 % globalement, mais peut atteindre 35-55% pour les planètes géantes, plus difficiles à distinguer des étoiles de faible masse et naines brunes. En revanche, le taux de faux positifs dans le cas des systèmes multi-planétaires (en particulier dans le cas des systèmes à TTV, voir ci-dessus) est faible.
Complémentarité des méthodes
Limites de la méthode des transits
L’observation photométrique du transit ne fournit que le rapport du rayon de la planète à celui de l’étoile, pas le rayon absolu de la planète. Par ailleurs, sauf dans les cas où des perturbations gravitationnelles entrent en jeu (TTV), les transits en eux-mêmes ne contraignent pas les masses planétaires.
Complémentarité des méthodes de transit et de vélocimétrie
En revanche, l’avantage majeur des transits est que les exoplanètes détectées par cette méthode le sont également en principe par vitesse radiale, puisque l’inclinaison de l’orbite i est alors favorable et bien connue (proche de 90°). L’amplitude du signal Doppler sur l’étoile est relié à la masse planétaire par :
où et sont la masse planétaire et stellaire, e l’excentricité, P la période, et G la constante universelle de gravitation. L’avantage ici est qu’on peut écrire .
Importance des données stellaire
Densité des exoplanètes
Diagramme masse-rayon des planètes TRAPPIST-1, comparées aux planètes telluriques du Système Solaire et quelques autres exoplanètes. Sont montrées aussi les courbes theoriques pour des planètes de différentes compositions
Crédit :
Gillon et al. 2017
A nouveau, une limitation est que n’est pas connue. Il faut donc combiner les mesures de transit et de vitesse radiale avec des informations indépendantes sur l’étoile, typiquement obtenues via les modèles d’évolution stellaire, qui donnent des relations entre âge, luminosité, rayon, masse et composition.
Par ailleurs, comme indiqué en 2.2, la profondeur du transit , la durée du transit T et la durée de l’ingress/egress contraignent le rapport et le paramètre d’impact b, ce qui permet de « calibrer » le rayon planétaire en absolu. Si les propriétés stellaires sont suffisamment bien connues, on peut donc obtenir des valeurs absolues du rayon et de la masse planétaire, donc de sa densité, ce qui a évidemment une importance énorme pour contraindre la nature (gazeuse, glacée, rocheuse) et la structure interne de la planète.
Finalement, en combinant la relation ci-dessous avec la 3e loi de Kepler, on peut déterminer la gravité planétaire indépendamment des propriétés de l’étoile :
La connaissance de est nécessaire pour l’élaboration de modèles d’atmosphères.
Spectroscopie des transits et courbes de phase
Spectroscopie du transit
Spectre en transmission de HD 209458 b
Figure 7 : Le spectre en transmission de HD 209458b, exprimé en termes de profondeur du transit. La partie visible (<1 micron) suggère l’effet de la diffusion Rayleigh et de l’absorption par le sodium à 0.58 micron. La présence de la vapeur d’eau est clairement visible à 1.4 microns (Deming et al. 2013).
Crédit :
à traduire
Comme exposé plus haut, le principe de la spectroscopie du transit est de mesurer des variations spectrales de la profondeur du transit comme diagnostic de composition atmosphérique. A une longueur d’onde où l’atmosphère absorbe, le rayon "effectif" de la planète est augmenté d’une quantité , où H est la hauteur d’échelle de l’atmosphère et α est généralement un nombre de l’ordre de quelques unités. La profondeur du transit δ est donc augmentée de :
∼
Cette relation montre fondamentalement que l’effet est d’autant plus grand que H est grande, i.e. que l’atmosphère est chaude, de faible masse moléculaire, et que la gravité est faible. Par exemple, pour un Jupiter chaud (, , masse moléculaire = 2 amu (), ), on obtient , ce qui fait en adoptant . Pour une "Terre" (, , masse moléculaire = 28 amu (), ), on trouve et , en prenant toujours .
Dans les deux cas, l’ordre de grandeur est donc une augmentation relative de la profondeur du transit de l’ordre de 1% de sa valeur. Pour la planète tellurique, compte tenu que le transit géométrique est déjà inférieur à 0.01%, le signal spectral est donc inférieur à , ce qui illustre l’extrême difficulté de ce type de mesures.
Echelle de hauteur
La spectroscopie du transit primaire permet d’estimer l’échelle de hauteur atmosphérique. Imaginons d’abord que le coefficient d’absorption intrinsèque de l’atmosphère varie avec la longueur d’onde λ, mais pas avec le niveau d’altitude dans l’atmosphère. Si on note la section efficace d’absorption à la longueur d’onde λ, l’opacité en visée verticale est
, où est la concentration de l’espèce absorbante à l’altitude z. Comme le transit sonde les couches au limbe, l’opacité le long de la ligne de visée est multipliée par le facteur géométrique d’augmentation du parcours , et vaut donc :
On peut montrer que le rayon planétaire effectif à la longueur d’onde λ est égal au rayon de la surface augmenté de la hauteur pour laquelle l’opacité en visée horizontale vaut environ 0.56 :
Comme est relié à la concentration à la surface, selon , on peut en déduire
ce qui confirme que l’augmentation du rayon effectif est essentiellement proportionnelle à H (le terme dans le ln variant lentement avec H).
Cette expression montre que la variation du rayon effectif avec la longueur d’onde suit :
Si l’on connaît le mécanisme physique responsable de l’absorption (par exemple, la diffusion Rayleigh où σ varie comme une puissance de λ), la mesure de la variation du rayon effectif avec la longueur d’onde fournit directement la hauteur d’échelle de l’atmosphère , donc une estimation de sa composition principale si la température peut être estimée indépendamment.
Le raisonnement précédent est valable en première approximation lorsque l’opacité atmosphérique est le fait des brumes, mais l’est moins pour une absorption par les gaz, car celle-ci dépend intrinsèquement fortement de la pression. Ce développement analytique doit donc être remplacé par des modèles numériques. Il n’en reste pas moins vrai que le spectre en transmission montre la planète « plus grosse » dans les bandes d’absorption gazeuse qu’en dehors de ces bandes, et qu’il est alors possible de contraindre la composition chimique (Fig. 7).
Les premières découvertes d’espèces chimiques dans les spectres d’exoplanètes en transmission datent des années 2002-2003 avec la détection d’espèces atomiques (Na, H, et plus tard K, C, O) dans le spectre visible. Le cas de l’hydrogène atomique est particulier car il donne lieu à des transits extrêmement profonds (15%), causés par des atmosphères d’hydrogène très étendues et en échappement rapide. Dans l’infrarouge, dû à la grande difficulté d’extraire les spectres, des controverses ont eu lieu sur la réalité et surtout la quantification des signatures spectrales en termes de paramètres atmosphériques. Il semble toutefois qu’un nombre important de ces spectres montrent les signatures spectrales de H2O, celles de CH4, CO2, et CO étant également présentes sur quelques objets. Une caractéristique très fréquente est le rôle des brumes ou nuages de haute altitude, qui contribuent à l’émission dans le spectre visible et tendent à masquer les signatures des gaz dans l’infrarouge.
Spectroscopie de l'éclipse secondaire
Comme on l’a vu plus haut, l’observation de l'éclipse secondaire permet en principe de déterminer par différence la quantité de radiation que nous envoie une exoplanètes, que ce soit sous forme de lumière stellaire réfléchie ou de rayonnement thermique propre. La difficulté est ici le contraste de luminosité entre la planète et l’étoile.
La profondeur de l'éclipse secondaire s'écrit :
où et sont les intensités (par élément de surface) émises par la planète et l’étoile et est le rapport des rayons .
Dans la composante stellaire réfléchie, juste avant l'éclipse secondaire, la planète – qui présente alors sa face entièrement éclairée – reçoit une fraction
du rayonnement de l’étoile, et en réémet une fraction où est appelé l’albédo géométrique. Ceci correspond donc à une profondeur de l'éclipse secondaire égale à : .
Comme (et peut être <<1) et que (et normalement ), ceci implique le résultat intuitif que l'éclipse secondaire est (beaucoup) moins profonde que le transit primaire. Pour un albédo caractéristique de 10%, la profondeur de l'éclipse secondaire dans la composante stellaire réfléchie est de pour un Jupiter chaud à 0.05 UA (contre 0,01 pour le transit). Pour une Terre à 1 UA de même albédo, elle vaudrait ! Si elles sont complètement hors de portée dans ce dernier cas, les mesures d’albédo sont possibles pour des Jupiters chauds (voir plus loin les résultats de Kepler) mais requièrent une haute précision photométrique et l’accumulation de nombreuses mesures.
Le contraste devient progressivement moins défavorable dans la composante thermique. Dans ce cas, le rapport s’écrit comme le rapport des fonctions de Planck aux températures caractéristiques de la planète et de l’étoile . Dans la limite des grandes longueurs d’onde, il tend vers le rapport . Pour un Jupiter chaud () autour d’une étoile de type solaire, ce terme n’est plus pénalisant que d’un facteur à ). Ceci explique l’allure des courbes d'éclipse les plus favorables (cf. Fig. 3). Dans ce cas, il devient envisageable d’effectuer la spectroscopie de l’émission thermique.
Emission thermique de la planète
L’interprétation d’un spectre d’exoplanète dans le domaine thermique est très comparable à celle d’un objet du système solaire. Les paramètres libres sont essentiellement la structure thermique verticale, et les profils de composition qui stipulent la distribution verticale des gaz et des nuages. De manière générale, le rayonnement mesuré satisfait à l’équation dite du transfert radiatif, qui peut s’écrire (en négligeant les phénomènes de diffusion, et en supposant l’atmosphère suffisamment épaisse pour que la surface ne soit pas sondée) :
où est l’intensité lumineuse sortante à la longueur d'onde λ, τ est l’opacité verticale intégrée sur la ligne de visée à cette même longueur d'onde, et est la fonction de Planck à la température du niveau atmosphérique d’opacité , et où l’intégrale porte sur l’ensemble de l’atmosphère. Essentiellement, l’information sur le profil de température est contenue dans la fonction de Planck, alors que le profil vertical d’opacité contraint la composition chimique.
Comment résoudre l'équation de transfert radiatif
GCM
Résultat d'un GCM
Crédit :
M. Turbet, F. Forget
Une méthode dite d’inversion permet en principe de remonter aux deux paramètres, mais il est généralement impossible d’obtenir une solution unique ou même précise, compte tenu de la connaissance préalable très pauvre que l’on a des objets (contrairement aux atmosphères du Système Solaire), et le plus souvent de la qualité très modeste des spectres exoplanétaires (faibles résolution spectrale et signal-sur-bruit). Des contraintes supplémentaires peuvent être injectées pour aider à l’interprétation des spectres. Ainsi, on peut chercher des solutions physiquement cohérentes entre les profils de composition et de température, compte tenu des équilibres chimiques et de condensation entre les différents gaz et les nuages. Une autre complication est qu’on s’attend à ce que les profils atmosphériques présentent des variations horizontales considérables sur la planète (variations jour/nuit notamment), qui ne peuvent évidemment pas être appréhendées à partir d’un spectre planétaire unique.
Une approche alternative moderne est de construire des modèles atmosphériques auto-cohérents à 3 dimensions à l’aide d’outils de type MCG (modèles de circulation générale, GCM en anglais), puis de les tester en regard des observations. Il est aussi fructueux de combiner la mesure de l’émission thermique avec celle du spectre en transmission au moment du transit (cette dernière étant très sensible à la composition atmosphérique mais beaucoup moins aux détails du profil de température), tout en étant conscient que les deux mesures ne sondent pas les mêmes régions de la planète ; à nouveau le passage par un MCG peut s’avérer très utile.
Malgré tout, le plus souvent, au-delà de la présence avérée de certains gaz – H2O essentiellement – les interprétations du spectre d’un objet donné peuvent être diverses, avec des divergences sur les abondances gazeuses (parfois par des ordres de grandeurs), et sur la forme des profils de température – notamment la présence ou non de couches d’inversion (stratosphères).
Courbes de phase
La mesure de la courbe de phase est également une mesure de l’émission thermique d’une exoplanète, mais le focus est alors sur la variation photométrique de cette émission avec la position de la planète sur son orbite. Celle-ci renseigne sur les variations de la température « moyenne » (stricto sensu, la température au niveau d’émission dans l’atmosphère) le long de l’orbite. En général, comme indiqué plus haut, on a ainsi accès aux variations diurnes de température. Dans le cas d’une orbite de forte excentricité, les températures dépendent surtout de la distance à l’étoile, i.e. l’écart au périastre. Dans les deux cas, cela de permet de mesurer la constante de temps radiative de l’atmosphère, i.e. le temps caractéristique de réponse aux variations d’insolation.
Difficulté de la spectroscopie des exoplanètes
A de très rares exceptions près, la spectroscopie atmosphérique requiert une stabilité et une sensibilité qui ne peuvent être atteinte que par des moyens spatiaux. Dans l’infrarouge proche, les meilleurs spectres d’exoplanète en transit et en éclipse secondaire ont été obtenus par le télescope spatial Hubble (instruments NICMOS, STIS et surtout WFC3, couvrant 0.9 – 1.7 microns). A plus grande longueur d’onde, ces spectres ont été complétés par le spectromètre IRS (couvrant 5-14 microns) du télescope spatial Spitzer, alors que les courbes de phases proviennent le plus souvent du photomètre IRAC dans 4 bandes de longueur d’onde (3.6, 4.5, 5.8, 8.0 micron, cf Fig. 3). Dans un futur proche, les observations avec le télescope spatial JWST s'annoncent très prometteuses.
Les missions Corot et Kepler et leurs résultats
Deux missions de photométrie de haute précision
Nous terminerons par une description de deux missions spatiales dédiées (au moins partiellement) à la recherche et l’étude des transits exoplanétaires, et de leurs principaux résultats.
Corot
Corot
le satellite Corot
Crédit :
CNES
Courbe de lumière de Corot-7 b
Crédit :
ESA
CoRoT (COnvection ROtation et Transits planétaires), un programme mené par le CNES en collaboration avec l’ESA, a fonctionné de janvier 2007 à décembre 2012. Ce télescope de 27 cm en orbite géocentrique polaire était équipé de 4 détecteurs CCD couvrant un champ d’environ 3.5°. CoRoT a suivi des milliers d’étoiles de magnitude 11 à 16 avec une sensibilité photométrique d’environ 0.01 %. CoRot a permis la découverte de 31 exoplanètes. Parmi celles-ci, on peut relever les cas particulièrement intéressants suivants :
CoRot 7-b, dont le rayon (1.7 rayons terrestres) et la masse (5-8 masses terrestres, mesurée ultérieurement par vitesse radiale) impliquent une densité proche ou légèrement supérieure à celle de la Terre, ce qui en fit la première exoplanète tellurique découverte. Sa période orbitale est incroyablement courte (20.5 heures) et la distance à l’étoile n’est que de 6 rayons stellaires. D’après les modèles, la température côté jour pourrait dépasser 2000°C et la surface pourrait donc se présenter comme un océan de lave.
CoRot 1-b, première exoplanète dont l'éclipse secondaire a été observée dans la composante stellaire réfléchie
Corot 2-b, dont le très grand rayon (1.7 rayon de Jupiter) est mal compris, et la classent parmi les planètes « enflées »
Kepler
Kepler
Nombre d'exoplanètes
Figure 8 : Nombre d’exo-planètes découvertes par année (jusqu’au 10 mai 2016). En bleu clair et ocre, la contribution de Kepler à ces découvertes.
Crédit :
à traduire
Exoplanètes candidates de Kepler
Figure 9a : Candidats planétaires Kepler (en date du 23/07/2015) dans un diagramme période / rayon.
Crédit :
à traduire
Taille des exoplanètes
Figure 9b : Distribution des exo-planètes confirmées en fonction de leur rayon
Crédit :
à traduire
Exoplanètes dans la "zone habitable"
Figure 10 : Les 21 planètes de rayon inférieur à 2 rayons terrestres et se trouvant dans la zone habitable. Elles sont placées dans un diagramme montrant l’énergie qu’elles reçoivent de leur étoile (normalisée à celle reçue par la Terre du Soleil) en fonction de la température de l’étoile. Les zones vertes indiquent l’extension probable de la zone habitable selon une estimation prudente (vert clair) et optimiste (vert foncé).
Kepler, une mission du programme « Discovery » de la NASA, a été lancée en mars 2009 et a fonctionné nominalement jusqu’en mai 2013. Malgré des avaries techniques, elle a pu poursuivre son programme exoplanètes après cette date, sous le nom de mission K2. Avec un télescope de 1.4 m en orbite héliocentrique, sa précision photométrique est de 3x10-5, ce qui permet d’atteindre les planètes sub-telluriques, même si de nombreux transits sont nécessaires pour garantir des détections sans ambiguïté. Avec un champ de 115 degrés carrés, Kepler surveille en permanence 150,000 étoiles, pour la plupart de magnitude 14-16, avec une mesure photométrique toutes les 30 minutes. Un traitement automatisé détecte les «candidats », appelés aussi les Kepler Objects of Interest (KOI), i.e. les signaux pouvant indiquer le transit d’une exoplanète, mais qui doivent ensuite être inspectés/validés pour éliminer les faux positifs.
Les résultats de Kepler sont annoncés sous forme de parution régulière de liste de candidats et de planètes confirmées. Le nombre de planètes Kepler confirmées a dépassé le millier en janvier 2015, et a atteint 2325 en mai 2016 (Fig. 8). La majorité est dans la gamme des « super-Terre » (1 à 2 rayons terrestres) et « mini-Neptune » (2 à 3 rayons terrestres) (Fig. 9a, 9b). A ce jour, le nombre total d’exoplanètes confirmées découvertes par la méthode des transits est de l’ordre de 2700 (correspondant à environ 2000 systèmes planétaires), sur un total de 4000 environ. La méthode des transits est devenue, et de loin, la plus prolifique.
Outre la richesse et les études statistiques que permettent ces découvertes, on peut, comme pour CoRoT, relever quelques cas de planètes ou systèmes Kepler remarquables :
Les planètes dans la zone habitable. Kepler 22-b, une planète de ~2 rayons terrestres, située à 0.85 AU de son étoile-hôte (de type solaire), est la première exoplanète découverte (décembre 2011) dans la zone habitable, c’est-à-dire la zone où l’eau peut être présente sous forme liquide. Des indices suggèrent une composition interne différente (plus riche en volatils) que celle de la Terre, et sa surface pourrait être couverte d’océans. Depuis, Kepler a découvert 21 planètes de rayon inférieur à 2 rayons terrestre et dans la zone habitable (Fig. 10).
Les planètes circumbinaires, i.e. qui orbitent autour du barycentre d’un système d’étoile double. Le cas le plus célèbre est celui de Kepler 16-b (« Tatooine »). Suivant les époques, elle transite devant l’une ou l’autre des étoiles, ou les deux.
Les systèmes contenant de nombreuses planètes : par exemple, Kepler-90 abrite sept planètes, toutes transitantes, avec des rayons de 0.12 à 1 rayon de Jupiter, et des périodes de 7 à 332 jours. Dans certains cas, ces planètes sont en résonance de période: par exemple, les 4 planètes de Kepler-223 sont en résonance 3 :4 :6 :8.
Les planètes non transitantes découvertes par la méthode des TTV (transit time variations)
Les planètes les plus « extrêmes ». On trouve ainsi dans le bestiaire Kepler :
l’exoplanète la plus petite : Kepler 37-b, à peine plus grande que la Lune (0.30 rayon terrestre)
l’exoplanète la plus chaude et la deuxième plus proche de son étoile : Kepler-70b, qui orbite en 5.8 heures et à 0.0060 UA l’étoile sous-naine B Kepler-70, a une température estimée à 7100 K. Elle est donc plus chaude que la surface du Soleil ! A noter que le système possède une seconde planète, Kepler-70c, qui orbite à 0.0076 UA. Il s’agit du couple d’exoplanètes les plus proches : au plus près, les objets sont à 240000 km l’un de l’autre (60 % de la distance Terre-Lune)
l’exoplanète de plus fort albédo. Alors que la plupart des albédos exoplanétaires mesurés sont typiquement de 0.1 ou moins en raison de l’absorption par des espèces atmosphériques comme Na, K, TiO, VO, Kepler 10-b, une autre planète « océan de lave » a un albédo d’environ 0.5.
Se tester
Auteur: F. Roques
Se tester
Auteur: J.M. Griessmayer
HD 189733
Temps :
En 2005, il n'y avait que 160 exoplanètes découvertes, la plupart par la méthode des vitesses radiales. La planète HD 189733 a été découverte par François Bouchy et son équipe au cours d'une campagne de recherche associant le spectrographe à fibres ELODIE et une caméra CDD.
Question 1)
La courbe de lumière de HD 189733
montre plusieurs phénomènes. Expliquer à quels phénomènes physiques chaque phase correspond et quels paramètres de la planète ils permettent d'estimer.
A quoi correspond le flux = 1?
Question 2)
L'appliquette montre les données de vitesse radiale de HD 189733. A l'aide des curseurs, retrouvez les paramètres de la sinusoide.
est la vitesse radiale de l'étoile
est la vitesse radiale du centre de gravité du système
est la demi-amplitude de la sinusoïde
est le temps en Jours Julien
est la période de révolution de la planète autour de l'étoile
est la phase
Commencez par , puis .
Projet
Projet : Découverte de WASP-80
Ce projet a pour but de mettre en application tout votre nouveau savoir théorique pour l'appliquer à un cas pratique. Nous allons prendre des données réelles de transit, chercher si une planète s'y cache, et le cas échéant, déduire les paramètres de la planète associée, tels que son rayon et sa période. Vous comparerez alors vos résultats à ceux qui ont vraiment étaient publiés par l'équipe de recherche qui a traité ces données il y a quelques années.
Nous allons analyser des données provenant de SuperWASP qui est composé de 8 télescopes de 11cm chacun, ce qui permet de couvrir presque 500 degrés carrés sur le ciel (i.e. la surface d'environ 2500 pleines lunes à chaque prise). Il y a en fait un SuperWASP au Nord (La Palma) et un au Sud (Afrique du Sud) pour pouvoir couvrir tout le ciel (plus de détails ici ).
Voici les données historiques qui ont mené à la première détection de la planète autour de l'étoile WASP-80 en 2013. Dans ce fichier, vous trouverez les mesures photométriques de l'étoile WASP-80 (située dans la constellation de l'Aigle) à différentes dates. Les 3 colonnes indiquent respectivement la date du point photométrique (en BJD pour Barycentric Julian Date, qui donne le jour julien correspondant à l'observation), la magnitude de l'étoile mesurée à cette date, et l'erreur associée sur la magnitude.
WAST-80 : Les données
Exercice
Nous allons utiliser python pour ce mini-projet. Vous pouvez aussi utiliser votre langage de prédilection si Python ressemble à des hiéroglyphes pour vous.
Question 1)
Commencez par charger le fichier wasp80data.txt qui contient les observations de WASP-80 et faites un graphe représentant la magnitude en fonction du temps, avec les barres d'erreurs associées à chaque point.
En python, cela donne :
On pourrait travailler avec les magnitudes, mais il est plus commun de travailler directement en flux. En effet, un transit produit une baisse du flux total qui provient de l'étoile alors que ça provoque une augmentation de la magnitude et donc on ne verrait pas une baisse mais une croissance de la magnitude lors d'un transit en magnitude. Vous pourrez essayer plus loin de suivre la même procédure en travaillant sur les magnitudes (pour constater que l'on arrive aux mêmes résultats) mais pour le moment on travaillera en flux.
Reproduire le même graphique que précédemment en unité de flux
La conversion d'un Flux F à une magnitude m est telle que
Que voyons-nous ? Est-ce ce à quoi l'on s'attend ? Voyons-nous un transit ? Pas vraiment ! Ça ne ressemble pas exactement aux courbes théoriques que l'on a vues dans le cours avec une belle chute de flux quand la planète passe devant son étoile. Pour cela il va falloir travailler un peu les données.
Un œil averti se rendra compte que ces données on été pré-traitées. On voit que la magnitude oscille autour de zéro, la composante de magnitude due à l'étoile a donc été retirée. On voit aussi que les données semblent suivre une ligne horizontale, sans qu'il y ait de variations linéaires ou polynomiales. En réalité, quand on obtient les données brutes, c'est beaucoup moins propre que cela, et il faut retirer les effets qui ne sont pas dûs au transit mais plutôt à l'observation en tant que telle. Il peut y avoir des déviations du signal dues à l'instrumentation (par exemple à cause de variations thermiques), ou même des variations de l’atmosphère au cours de l'observation. Il y a différentes méthodes pour réajuster les données afin de corriger ces variations qui ne sont pas dues au transit. De manière générale et simplifiée, cela revient à trouver une fonction polynomiale qui suit au mieux les variations à long terme et de retirer cette fonction du signal. On appelle cela le detrending. Les données que l'on traite ici ont déjà subi ce detrending et peuvent être maintenant exploitées pour chercher un transit potentiel et trouver les paramètres de la planète le cas échéant.
WASP-80 : Les transits
La recherche des transits
Que faut-il faire pour essayer de voir un transit dans ces données ?
Ici, on a la magnitude (ou le flux) du système en fonction du temps. Pour pouvoir voir un transit, et c'est là toute la puissance de cette méthode de détection, il va falloir sommer les différents transits potentiels qu'il y a dans ces données. Pour cela, il faut trouver la bonne période sur laquelle sommer les données, et peut-être qu'alors avec une somme de plusieurs transits, on verra effectivement une courbe de lumière typique avec une baisse de flux quand la planète passe devant son étoile.
Question 1)
On peut essayer par exemple de sommer les signaux sur une période de 2 jours. En python cela donne :
from PyAstronomy.pyasl import foldAt
best_period=2#jours
phases = foldAt(bjd, best_period)
sortIndi = np.argsort(phases)
phases = phases[sortIndi]*best_period
mag = mag[sortIndi]
plt.plot(phases, mag)
Question 2)
On ne voit toujours rien. Idéalement, il faudrait pouvoir faire cela pour un très grand nombre de périodes et visualiser le résultat jusqu'à l'obtention potentielle d'une baisse de flux à un endroit de la courbe (i.e. voir le transit). C'est la méthode que l'on va utiliser, mais bien sûr, il est impossible de visualiser des millions de courbes à l'oeil et il faut trouver un bon indicateur que l'ordinateur puisse tester lui-même pour nous dire quand il y a effectivement une baisse de flux visible et donc un transit.
La méthode la plus couramment utilisée dans le domaine de la recherche est la méthode BLS (pour Box Least Square, développée par Kovacs et al. 2002). L'idée est de dire qu'un transit peut être en première approximation modélisé par une fonction porte (fonction rectangulaire). Un transit est en effet bien plus proche d'une fonction porte que d'un sinus ou cosinus car les variations lors de l'entrée ou de la sortie du transit qui peuvent être non rectangulaires ne représentent qu'une petite partie du signal et le reste du transit est plutôt plat. La décomposition en série de Fourier ne fournirait pas une fréquence donnée dominante mais plutôt un ensemble de fréquences alors que la fonction porte ne requiert qu'un terme pour bien modéliser le signal, d'où l'avantage.
On crée alors un modèle simple de fonction porte avec trois paramètres : sa profondeur, sa longueur (durée du transit) et sa phase (la date où le transit a lieu). On fait ensuite tourner le modèle sur un très grand nombre de périodes. Pour chaque période testée, l'algorithme BLS essaye de trouver les meilleurs paramètres (profondeur, longueur, phase) du modèle pour expliquer les observations. L'algorithme compare le meilleur modèle aux données et estime alors la vraisemblance (en log) du modèle en question (par exemple par une méthode des moindres carrés) et crée un périodogramme qui donne la vraisemblance du modèle en fonction de la période. On peut alors voir si certaines périodes paraissent plus vraisemblables que d'autres. Les pics dans le périodogramme indiquent la présence de planètes en transit ou du bruit non pris en compte dans le pré-traitement (detrending). Il faut faire attention aux faux-positifs avec cette méthode et les repérer est un champ actif de recherche dans lequel nous ne rentrerons pas en détails.
Trouvez la période du transit et sa profondeur dans les données de WASP-80.
Il faut utiliser la méthode BLS décrite précédemment. Soit vous la codez vous-même, soit vous utilisez une fonction pré-existente qui intègre déjà cet algorithme BLS. Il y a de telles fonctions en python ou fortran par exemple.
Question 3)
Vérifiez ces valeurs en sommant les données initiales sur la période trouvée et en affichant le flux en fonction de la phase (vous pouvez utiliser le code de la question 1 ci-dessus pour sommer les différents transits sur une période donnée). Vous produirez aussi une deuxième courbe où vous moyennerez le signal dans des bins temporels d'environ 15 minutes pour avoir une courbe de transit plus lisse.
Maintenant, on reconnaît une courbe de transit typique. On peut même zoomer sur la phase de transit pour obtenir la figure ci-jointe.
Transit
Crédit :
Q. Kral
On voit alors que la durée du transit totale est inférieure à 0.1 jours, i.e. <2.4h. Pour obtenir la courbe rouge rebinnée en python, on peut écrire un code ad hoc ou procéder ainsi :
Déduisez maintenant le rayon de la planète et son demi-grand axe.
Question 1)
Il faudra d'abord trouver le rayon de l'étoile WASP-80 afin de pouvoir déterminer le rayon de la planète.
Nous allons estimer le rayon de l'étoile à partir de sa température et de sa distance. La température est estimée à partir de ses magnitudes dans la couleur bleue (B) et visible (V) grâce au graphe ci-joint.
Les données de l'étoile, sa distance et ses magnitudes B et V sont données dans le tableau venant de l'article de Triaud et al. ( ci-joint). Ces données sont aussi accessibles dans la base de données Simbad
Notez que Simbad donne la parallaxe de l'étoile en milliarcseconde d'arc. La distance exprimée en parsec est l'inverse de la parallaxe exprimée en seconde d'arc.
On utilise le fait que la luminosité d'une étoile est , que , où est la magnitude absolue de l'étoile (i.e. la magnitude qu'aurait cette étoile si elle était à 10pc) et enfin que la magnitude absolue et la magnitude visuelle, sont liées à la distance par
La magnitude absolue du Soleil est de 4.83 et sa température est de 5800K.
Dans ces calculs, on utilise différentes magnitudes dont les définitions sont données ici. La magnitude visuelle est notée ou .
Question 2)
Le calcul du rayon de l'étoile que l'on vient de mener n'est qu'un calcul approximatif etTriaud et al. (2013) sont capable d'estimer ce rayon plus précisément à partir de leur jeu de données, ils trouvent , que l'on utilisera par la suite pour comparer à leurs résultats.
Maintenant on peut déduire le rayon de la planète. En supposant que l'orbite est circulaire, on peut aussi déduire facilement son rayon orbitale à partir de la 3ème loi de Kepler
On utilise Tpla= 3.0674846 jours et la masse de l'étoile est dans Triaud et al. (2013), soit 0.57Ms.
Question 3)
On peut maintenant comparer aux valeurs trouvées dans le papier originel de Triaud et al. (2013) (tableau ci-joint).
On voit que nos valeurs pour , la période et le demi-grand axe sont très proches des valeurs originelles.
Paramètres du système WASP-80
article Triaud et al. 2013
On peut aussi comparer les valeurs trouvées avec celles de l'encyclopédie exoplanet.eu.
Comme vu dans le cours, on peut faire une première vérification pour tester pour un faux positif, en comparant la durée du transit théorique avec sa durée réelle que l'on a obtenue à la question 3 de la page précédente.
WASP-80 : Pour aller plus loin
Pour aller plus loin vous pouvez aussi essayer d'obtenir plus d'informations à partir des données, par exemple en utilisant, au lieu de la fonction porte, un vrai modèle de transit à la Mandel & Agol (2002) pour pouvoir déduire le paramètre d'impact et une possible excentricité en prenant en compte les effets d'assombrissement centre au bord (il y a une fonction python qui implémente ce modèle ).
Ce dossier(une fois décompressé, le fichier readme.txt décrit les différents fichiers) donne un ensemble de données qui permettent de faire d'autres analyses de cette planète:
Le dossier donne aussi des données Spitzer (infrarouge) du même système qui ont été utilisées dans Triaud et al. (2015). Dans ces données, on peut voir l'éclipse secondaire (en plus du transit) car le contraste dans l'infrarouge est plus favorable. Attention, il va falloir faire du detrending pour bien corriger les données brutes. Vous pouvez alors déduire la température de brillance de la planète. On s’attend à ce que la température d’équilibre et de brillance soient du même ordre, mais pas exactement les mêmes. On s'attend à ce que le côté jour de la planète soit légèrement plus chaud et le côté nuit légèrement en dessous de la température d’équilibre.
Pour avoir un jeu de données complet, on fournit aussi les observations en vélocimétrie radiale avec Coralie et HARPS pour ce même système afin de pouvoir aussi déterminer la masse de la planète et ainsi connaître sa densité (et donc pouvoir inférer sa composition).
Vous pouvez faire une courbe de la vitesse radiale en fonction de la phase (comme pour la courbe de transit) et voir ce qu'il se passe, en particulier pendant le transit. On peut, en effet, voir l'effet de Rossiter-McLaughlin dans les données HARPS, ce qui permet de contraindre le sens de rotation de l'orbite de la planète et l’orientation de l’orbite planétaire, à savoir l’angle entre le plan orbital et l’axe de rotation de l’étoile.
Au boulot !
-------------FIN DU CHAPITRE -------------
-------------FIN DU CHAPITRE -------------
-------------FIN DU CHAPITRE -------------
L'étude des atmosphères des exoplanètes n'est pas uniquement limitée aux observations. On peut en effet faire des découvertes intéressantes au moyen de modèles qui simulent leur atmosphère. Ces modèles sont des outils informatiques complexes bien que reposant sur des lois physiques simples, issus de décennies de recherche dans la modélisation de l'atmosphère de la Terre, puis des planètes du système solaire.
Avant de suivre ce cours, il est conseillé d'avoir suivi les deux cours précédents sur l'atmosphère : dynamique et température.
Découvrir
Les premières idées de modélisation de l'atmosphère
Commençons par dresser une rapide chronologie de l'histoire des modèles numériques qui, bien que spécifique à l'atmosphère terrestre, nous éclaire sur leur démarche de compréhension de la réalité et qui sera reprise plus tard pour les planètes de notre système solaire, puis pour les exoplanètes.
Tout commence avec les développements de la physique des fluides au XIXe siècle, qui permet l'émergence d'un cadre scientifique et rigoureux pour poser les bases de la physique atmosphérique et la compréhension des mécanismes à l'œuvre dans l'atmosphère. Plus précisément, la formulation des équations primitives atmosphériques par Bjerknes en 1904 montre que l'écoulement de l'air dans l'atmosphère est régi par sept équations à sept inconnues. Dès lors, selon Bjerknes, prédire le devenir de l'atmosphère reviendrait à intégrer dans le temps ces équations en les initialisant avec des données provenant de stations de mesures météorologiques
Le problème décrit pas Bjerknes s'avère complexe : on ne sait pas résoudre ces équations analytiquement en raison de leur forte non-linéarité. En 1922, Richardson tente de surmonter ce problème en découpant une zone géographique d'étude en cellules où il intègre les équations primitives en les discrétisant avec la résolution de différences finies. Pour ce faire, les calculs sont résolus à la main, une tâche qui semblerait aujourd'hui bien fastidieuse.
Bien que son intuition et son ambition soient remarquables, son expérience « d'ordinateur humain » échoue à reproduire les résultats espérés de l'écoulement atmosphérique. En effet, son système d'équation ne prenait pas en compte des termes d'ondes atmosphériques à haute fréquence pourtant présentes à l'initialisation du problème, ce qui a conduit à la divergence de la solution. Son expérience ne sera tentée à nouveau qu'après l'avènement de l'ère informatique dans la seconde moitié du XXe siècle.
On peut voir sur cette page issue d'un travail de Richardson le découpage de l'atmophère en une grille régulière en Europe de l'Ouest. A chaque case correspond une ville se trouvant au plus proche du centre de la case pour mesurer la pression (cases noires) et le vent (cases blanches).
Crédit :
Charney 1951 / Google books
Les premiers modèles numériques
En 1948 et 1949, Charney, Fjørtoft et von Neuman réussirent la première prédiction météorologique à l'aide d'un modèle numérique. Pour ce faire ils utilisèrent uniquement l'équation de vorticité pour une atmosphère barotrope, c'est-à-dire supposée homogène, de densité uniforme et sans mouvement vertical. S'ensuivirent quelques années plus tard le premier service de prédiction météorologique en temps réel au moyen d'un modèle numérique par Rossby en 1954.
Ces expériences suggérèrent que l'intégration des équations primitives ne suffisait pas à modéliser toute l'atmosphère. En effet, ces équations sont l'équation de Navier-Stokes et une équation d'état pour l'air, appliquée sur une sphère en rotation. Charney propose de prendre en compte également les phénomènes physiques à plus petite échelle, tels que la condensation de l'eau, les radiations visibles et infrarouges et les flux turbulents de chaleur et de moment. La prise en compte de ces effets, au moyen de paramétrisations, a été depuis et demeure encore actuellement un sujet de recherche majeur dans la modélisation numérique de l'atmosphère.
Un exemple de prédiction atmosphérique
Les prévisions météorologiques s'appuient sur des résultats de simulations de modèles numériques d'atmosphères. L'exemple ci-dessus illustre une prédiction de vent (couleurs) et de pression de surface (contours).
Crédit :
ECMWF
L'utilisation des modèles aujourd'hui
Depuis les années 1950, de très nombreux groupes de recherche ont développé des modèles numériques pouvant simuler l'atmosphère de par le monde. Comme on vient de le voir, leur motivation première provient de la volonté de prédire l'écoulement de l'air, ou autrement dit sa circulation. Le nom donné à de tels modèles est MCG, pour Modèle de Circulation Générale, mais on utilise plus communément l'acronyme anglais GCM. Aujourd'hui les applications des GCMs se sont diversifiées : en plus de la prédiction météorologique, on les utilise pour étudier le climat de la Terre et les effets du changement climatique, les climats passés, présents et futurs d'autres planètes (Mars, Vénus, Jupiter, Saturne, Pluton) ou satellites (Titan, Triton) dotés d'une atmosphère dans le système solaire ainsi que du climat d'exoplanètes.
Les observations que nous possédons aujourd'hui sur les exoplanètes ne suffisent pas encore à contraindre précisémment un GCM. En effet, il faudrait une bonne connaissance de leur orbite, rayon, masse, etc ... et évidemment de leur topographie (pour les planètes telluriques) et composition atmosphérique pour être à même de simuler spécifiquement l'atmosphère d'une exoplanète. Le plus souvent, l'utilisation d'un GCM pour modéliser des atmosphères d'exoplanètes tient dans des études assez générales qui nous renseignent sur le comportement d'une atmosphère avec des hypothèses génériques. Toutefois, on constate qu'un nombre grandissant d'études visent à simuler l'état atmosphérique d'exoplanètes connues de la manière la plus fidèle possible afin d'interpréter au mieux les premières observations de leur atmosphère.
Pour l'étude de la Terre, le terme de GCM peut aussi bien faire référence à un modèle qui simule son atmosphère ou ses océans. Le couplage d'un modèle d'océan et d'atmosphère, avec également d'autres modèles pour la surface (hydrologie, végétation, glace d'eau) conduit à l'apparition d'un modèle qu'on qualifie de Global Climate Model, et dont les initiales restent GCM. Le terme de GCM est ainsi utilisé avec ambiguité et peut désigner un modèle d'atmosphère seul, d'océan seul, ou de l'addition d'un modèle d'atmosphère, d'océan et de surface.
Les initiales GCM peuvent indifférement vouloir dire Global Circulation Model ou Global Climate Model, mais on préférera le terme de climat à celui de circulation car bien souvent le but d'un GCM est de connaître le climat d'une exoplanète plutôt que sa circulation à un instant donné.
La planète Mars vue par le téléscope spatial Hubble
Ces quatre vues de la planète Mars montrent clairement la présence de nuages d'eau dans son atmosphère. Il est possible, grâce à un GCM, de simuler ces nuages et d'en apprendre plus sur leurs caractéristiques.
Crédit :
S. Lee, J. Bell, M. Wolff, HST, Nasa
Comprendre
Qu'est-ce qu'un GCM ?
Un GCM (Global Climate Model) est un modèle numérique dont le but est de simuler l'atmosphère d'un corps planétaire. L'ambition est de pouvoir reproduire toutes les observations instrumentales possibles, par exemple la température, les vents, etc ...
Le développement d'un GCM n'est jamais finalisé, et les accords aussi bien que les désaccords avec les observations disponibles poussent à améliorer le modèle, ce qui nous permet au passage d'en apprendre toujours plus sur les processus physiques à l'oeuvre dans le système climatique d'une corps planétaire.
Un GCM est basé sur un nombre limité d'équations, qui permet néanmoins d'atteindre un certain niveau de réalisme et de complexité. Il est fondamental de souligner que grâce à l'hypothèse d'universalité des lois de la physique, on arrive à adapter un GCM construit pour la Terre à d'autres corps dotés d'une atmosphère, moyennant un changement de certains paramètres (orbite, taille, composition, etc...), et l'ajout ou le retrait de certains processus physiques spécifiques au corps étudié. Par la suite, les explications sur la structure d'un GCM restent générales et ne sont pas, sauf mention autre, spécifiques à un corps en particulier.
Cette vidéo de l'Institut Pierre-Simon Laplace explique ce qu'est un GCM terrestre appliqué à la modélisation du climat.
Du modèle physique au modèle numérique
Une équation d'une loi physique comprenant une dérivée temporelle et/ou spatiale décrit l'évolution de variables continues avec le temps et/ou l'espace. On peut vouloir résoudre une telle équation au moyen de ressources informatiques, si par exemple sa résolution analytique est impossible ou si on veut l'intégrer à un ensemble plus complexe d'autres lois physiques. Pour ce faire, on procède à une discrétisation du temps et de l'espace, qui consiste à ne plus considérer les axes temporels ou spatiaux comme continus, mais au contraire comme un ensemble fini de valeurs. Ceci permet la discrétisation d'une équation, qui pourra dès lors être résolue par un ordinateur comme dans l'exemple suivant :
On utilise une grille régulière unidimensionnelle dont l'espacement entre deux points consécutifs est , qu'on appelle pas spatial. De même, deux instants consécutifs sont espacés d'une durée , qu'on appelle pas de temps.
On souhaite discrétiser sur cette grille un champ qui est solution de l'équation d'advection : , avec ayant la dimension d'une vitesse.
Pour procéder, on discrétise la variable en un champ sur la grille, dont la valeur au j-ième point de la grille au n-ième instant t est notée .
Une manière de discrétiser l'équation d'advection est de l'écrire: . Cette forme s'appelle un schéma amont.
La manière d'écrire les différentielles peut être différente. Ainsi on aurait pu l'écrire sous la forme d'un schéma centré pour la dimension spatiale : .
Ce qu'il faut retenir de cet exemple est que la discrétisation comporte une part d'arbitraire : il faut faire des choix, qui peuvent avoir des conséquences différentes sur la solution numérique finale.
Une équation discrétisée est donc une approximation de la véritable équation.
La première question de la discrétisation est de savoir si, pour reprendre l'exemple précédent, le champ discrétisé va tendre vers le champ analytique lorsque et tendent vers zéro.
La deuxième question est de savoir à quel point la solution obtenue sera une approximation de la solution analytique. La manière de discrétiser puis utiliser une équation est une discipline en soi et il serait vain de vouloir introduire le sujet ici. Il faut juste garder à l'esprit qu'un GCM est un ensemble d'équations discrétisées, et par conséquent une approximation de la réalité. Cette approximation n'est pas du tout rédhibitoire et n'est pas le principal contributeur d'erreur d'un GCM. Toutefois, la discrétisation impose une règle forte sur le dimensionnement du GCM.
Cette règle, appelée condition de Courant-Friedrich-Lévy, repose sur le nombre de Courant :
avec la vitesse maximale, le pas de temps et le pas d'espace.
Cette condition stipule que dans un cas simple ce nombre ne doit pas dépasser 1. Autrement dit, on choisit les pas de temps et d'espace tels qu'aucune particule d'air ne traverse plus d'une parcelle géométrique en un pas de temps. En pratique, l'utilisation de plusieurs équations dans un modèle, ainsi que l'utilisation de techniques de discrétisation plus poussées, font que cette simple condition n'est pas la seule à prendre en compte. Toutefois, cette condition demeure une limite forte et on aura toujours dans un GCM.
Structure d'un GCM
La structure d'un GCM peut se décomposer en "briques" indépendantes qui communiquent entre elles.
Du fait de l'universalité de ces équations, la nature de ces briques est la même quel que soit le corps étudié. La structure d'un GCM est en général composée des briques suivantes :
Étant donné que l'atmosphère est fortement stratifiée à grande échelle en vertu de l'équilibre hydrostatique, les longueurs caractéristiques horizontales et verticales ne sont pas les mêmes. Ceci permet de découper le GCM en deux parties différentes :
La première, appelée « dynamique », est le coeur hydrodynamique. Dans cette partie on calcule l'écoulement du fluide qu'est l'air autour d'un corps sphérique planétaire.
Elle consiste en l'implémentation des équations primitives et calcule la circulation atmosphérique. A un niveau vertical donné, les mouvements sont uniquement horizontaux. Le terme de "coeur" provient du fait que la partie dynamique sert à propager les mouvements à l'échelle horizontale, laquelle échelle domine la circulation globale de l'atmosphère.
La seconde, appelée « physique », rassemble tous les autres processus physiques à l'œuvre dans l'atmosphère sous forme de paramétrisation. Cela correspond donc au moins aux briques 2 à 5, mentionnées ci-dessus. La partie physique est une colonne verticale d'atmosphère : il s'agit d'un même modèle unidimensionnel démultiplié autant de fois qu'il existe de points dans la grille horizontale (donc dynamique) du modèle.
Les colonnes de la partie physique sont indépendantes les unes des autres et ne communiquent que via la partie dynamique par des mises à jour de pression, températures, vents et traceurs. On peut également voir la situation dans le sens inverse : la partie dynamique consiste en des couches sphériques imbriquées les unes dans les autres qui ne communiquent que via la partie physique.
Ce découpage en deux parties permet de faire appel à la partie physique moins souvent qu'à la partie dynamique, car les processus physiques en jeu ont des temps caractéristiques différents et donc des pas de temps d'intégration différents. Typiquement, on utilise la partie physique tous les 10 à 20 utilisations de la partie dynamique.
Structure d'un GCM
Ce schéma illustre le principe de fonctionnement et l'interface des parties physique et dynamique d'un GCM.
Crédit :
LMD
Partie dynamique
Discrétisation horizontale
Un GCM consiste en la discrétisation du temps en des instants régulièrement espacés (typiquement de l'ordre de la minute pour une planète comme la Terre) et en la discrétisation d'un espace tridimensionnel qu'on suppose être une sphère d'épaisseur mince. Il existe deux grandes manières de discrétiser la sphère pour les champs atmosphériques.
La première consiste à placer un certain nombre de points pour recouvrir la sphère, dans une méthode qu'on appelle différences finies. La deuxième consiste à discrétiser non pas en coordonnées géométriques, mais en coordonnées spectrales : les champs atmosphériques sont décomposés en harmoniques sphériques et tronqués au-delà d'une certaine harmonique. Dans ce dernier cas, il est nécessaire de faire la transformation des variables atmosphériques de l'espace fréquentiel vers l'espace géométrique avant l'appel à la partie physique et inversement.
En utilisant la méthode des différences finies, on peut trouver plusieurs façons de découper une sphère. Dans le cas d'une grille latitude-longitude, la dimension horizontale est tout simplement découpée en longitudes et latitudes également espacées, ce qui produira un point singulier à chaque pôle. Afin d'éviter ce problème on peut utiliser un découpage dit cube sphère, qui consiste en la projection d'un cube discrétisé sur la sphère, et donnera 8 points singuliers au lieu de deux dans le cas d'une grille latitude-longitude, mais qui seront plus simples à gérer. On peut également s'affranchir de tout point singulier au moyen d'un grille icosahédrique qui utilise des triangles pour couvrir la sphère. On peut imaginer d'autres manières de procéder, mais ces trois là constituent l'immense majorité des GCMs.
Le nombre et l'emplacement des points dans les dimensions horizontale et verticale restent fixés lors de l'exécution du programme informatique. Il est possible d'utiliser une résolution qui s'adapte aux conditions atmosphériques à un moment donné, mais cette particularité est encore (en 2017) peu répandue parmi les GCMs, et induit des complications qui font qu'on considérera que la résolution est fixée pour le reste de ce cours. On utilise le terme de résolution pour parler de la quantité de points utilisés dans la discrétisation spatiale. Ce terme s'utilise aussi dans le cas d'une discrétisation spectrale, et il correspond au nombre de modes employés dans la représentation des champs atmosphériques.
La résolution spatiale d'un GCM va typiquement de quelques centaines de kilomètres jusqu'à quelques milliers de kilomètres. Ce qui se passe en dessous de cette échelle n'est pas directement représenté. S'il s'avère nécessaire de tenir compte d'un processus qui se déroule à une échelle plus petite, une paramétrisation de ce processus est nécessaire, et est généralement intégrée dans la partie physique du modèle.
Grille latitude-longitude. Les pôles sont des points singuliers qu'il convient de traiter de manière particulière lors de la discrétisation des équations primitives sur cette grille.
Crédit :
MITgcm
Grille cube sphère. Chaque face d'un cube, déjà découpée, est projetée sur une sphère de même centre.
Crédit :
Bruno Luong
Grille icosahédrique. Chaque triangle peut être individuellement redécoupé en plus petits triangles.
Crédit :
Sadourny et al. 1969
Discrétisation spectrale. On décompose chaque champ atmosphérique en harmoniques sphériques. L'avantage est d'éviter tout point singulier, mais il faut sans cesse faire la conversion sur une grille découpée spatialement, comme les trois autres évoquées ici, pour faire le lien avec la colonne physique. On voit ici à quoi correspondent les 21 premiers modes.
Crédit :
Benoit Moser. Lesia.
Le cœur dynamique
Le cœur hydrodynamique ou plus simplement partie dynamique d'un GCM consiste en la discrétisation des équations primitives sur la grille horizontale. Le but de la partie dynamique réside essentiellement dans le calcul des vents, de la température, ainsi que du transport des traceurs.
En général, plusieurs approximations sont faites dans ces équations qui nous viennent de l'étude de l'atmosphère terrestre, et qui doivent être remises en cause lorsqu 'appliquées à une autre atmosphère :
L'équilibre hydrostatique est respecté, ce qui supprime toute onde acoustique verticale. Ceci ne pose pas de problème étant donnée la résolution d'un GCM, mais peut en poser en cas de vents verticaux très puissants, comme dans la partie haute de certaines atmosphères.
L'épaisseur de l'atmosphère est petite devant le rayon planétaire. Un cas bien connu où cette approximation atteint ses limites est Titan, qui possède une atmosphère de 500 km d'épaisseur pour un rayon de 2575 km.
La capacité calorifique de l'atmosphère est supposée constante, alors que le cas de Vénus nous montre qu'elle peut varier de 40 % selon l'altitude.
La composition atmosphérique, et plus particulièrement sa masse molaire, est aussi supposée constante. Ceci n'est pas vrai dans les atmosphères où un composant majeur peut condenser, comme avec le CO2 sur Mars ou le N2 sur Pluton et Triton.
Certaines quantités sont conservées au détriment d'autres. En effet, la quantité totale de masse, de moment angulaire, d'énergie, de température potentielle, de vorticitié potentielle et de traceur devraient toutes pouvoir être conservées. Hélas, ceci ne peut être le cas en raison de la discrétisation des équations primitives et des choix doivent être faits, qui dépendent du type d'atmosphère. Sans entrer dans les détails, on peut citer le cas des atmosphères en super-rotation (Vénus, Titan) qui requièrent de favoriser la conservation du moment cinétique.
Ainsi, le cœur hydrodynamique d'une planète autre que la Terre nécessite des adaptations et des généralisations par rapport à ce qui se fait depuis plus d'un demi-siècle dans le domaine de la modélisation terrestre. L'étude des planètes du système solaire a permis de mieux cerner ces généralisations, qui aujourd'hui s'appliquent aux exoplanètes.
Partie physique
Discrétisation verticale
On a vu qu'il existe différents types de discrétisation horizontale dans la partie dynamique. La discrétisation verticale pour la physique peut également varier d'un GCM à l'autre.
En général la dimension verticale, c'est-à-dire du bas vers le haut, fait intervenir la pression comme coordonnée naturelle plutôt que l'altitude. En effet, les dimensions horizontales d'un GCM sont telles que l'équilibre hydrostatique (voir ici) est toujours respecté, les fluctuations de pression autour de cet équilibre ne peuvent pas être représentées à l'échelle d'un GCM. Dès lors, la pression diminue de manière monotone avec l'altitude et constitue un système de coordonnées naturelles, d'autant plus qu'en vertu de l'équilibre hydrostatique, il existe un lien direct entre la pression et la masse d'atmosphère située au-dessus.
Le nombre de niveaux verticaux est de l'ordre de quelques dizaines, typiquement entre 20 au minimum pour représenter la circulation et 100 pour un modèle très résolu s'étendant très haut en altitude. À mesure que l'on monte en altitude, les niveaux sont de plus en plus espacés.
Ainsi, s'il arrive qu'à une altitude donnée la pression varie avec le temps, les niveaux verticaux suivront de fait cette variation. Pour les planètes telluriques, la topographie contrôle en grande partie la pression de surface, et il existe une représentation hybride qui tient compte de la topographie dans les plus basses couches de l'atmosphère, tout en se basant sur les niveaux de pression à plus haute altitude.
La question des limites du domaine représenté ne se pose par pour la grille dynamique, car elle représente une sphère. Pour la physique, l'extension verticale requiert de poser une limite en bas et en haut. La surface sert de limite dans le bas de l'atmosphère, et on impose les flux de masse verticaux en haut et en bas comme étant nuls. Ceci nécessite pour la limite haute la mise en place d'une couche-éponge pour éviter la réflection non réaliste d'ondes atmosphériques sur le plus haut niveau du modèle.
La discrétisation verticale en niveaux de pression ne tient pas compte de la topographie des planètes telluriques. Dans les plus basses couches de l'atmosphère, on peut utiliser une correction utilisant la pression de surface de manière progressive avec l'altitude .
Transfert radiatif
Le transfert radiatif dans un GCM est une paramétrisation qui vise à calculer l'impact du rayonnement sur l'atmosphère. In fine, le rayonnement donne lieu à des taux de chauffage ou de refroidissement de l'air, qui varient spatialement et temporellement. Le transfert radiatif est un point crucial pour le réalisme d'un GCM. En effet, il est le moteur de la circulation atmosphérique qui, en provoquant des gradients de température à l'échelle globale, va forcer tous les mouvements à grande échelle.
Le taux de chauffage ou de refroidissement atmosphérique provient de l'interaction entre d'une part le rayonnement et d'autre part deux entités :
Les gaz qui composent l'atmosphère, qu'ils soient majoritaires ou minoritaires
Pour compliquer les choses, le connaissance du rayonnement lui-même dépend de ces deux entités. En haut de l'atmosphère, le rayonnement provient bien entendu de l'étoile. Dans l'atmosphère, ce rayonnement provient à la fois de l'étoile, en ayant été en partie absorbé ou diffusé par les gaz et les aérosols, et à la fois des gaz et aérosols eux-mêmes par émission thermique.
Il existe trois types de méthodes pour calculer le transfert radiatif à travers des gaz dans un GCM. Elles nécessitent avant tout une bonne connaissance du spectre du mélange de gaz présent dans l'atmosphère. Ce spectre est obtenu au moyen de simulateurs spécifiques, et vaut pour une température, une pression et une composition atmosphérique données. On pourrait d'abord naïvement tenter de calculer la contribution de chaque longueur d'onde au bilan radiatif global, mais c'est en pratique impossible car un tel calcul prendrait trop de temps pour les besoins d'un GCM. Au lieu de cela, il faut faire des simplifications. La plus simple est d'utiliser un modèle par bandes, dans lequel le flux radiatif est moyenné sur différents intervalles de longueurs d'onde. Une amélioration de cette méthode, appelée puissance nettes échangées, consiste à ne pas considérer les flux radiatifs du rayonnement, mais les échanges entre chaque niveau vertical de la colonne physique du GCM. Enfin, la méthode des distributions k-corrélées consiste à classer les lignes d'absorption du spectre par intensité croissante, puis à les interpoler par une fonction analytique. On passe ainsi de données spectrales très précises mais en nombre important et donc difficilement exploitables, à une approximation décrite par quelques paramètres et rapide en utilisation.
Le transfert radiatif des aérosols nécessite de connaître leur taille et leur composition afin de paramétriser leur effet sur la température atmosphérique. On peut employer les techniques précédemment décrites pour les gaz. Une technique largement employée est la division en bandes dans le spectre visible et infrarouge.
Pour aller plus loin, un GCM martien développé par la Nasa fournit une
documentation sur le transfert radiatif d'un modèle.
Une portion du spectre en absorption de l'air martien. On ne peut pas utiliser explicitement chaque ligne d'absorption dans le code radiatif. Un tel spectre doit être simplifié.
Crédit :
Mischna, Lee, Richardson 2012
Convection et turbulence
Certains processus de mélange de l'air interviennent à des échelles plus petites que celles résolues par la dynamique. Ces processus sont essentiellement la convection, qui peut se structurer en cellules de plusieurs de kilomètres, et la turbulence, qui agit depuis les échelles microscopiques jusqu'à quelques dizaines de mètres.
Une méthode simple pour représenter la convection consiste à utiliser un modèle dit d'ajustement convectif, qui va corriger le profil vertical de température vers un profil adiabatique stable. Autrement dit, on force la température potentielle à être constante là où le profil est instable. Bien que ce soit effectivement ce que la convection produit à grande échelle, un tel modèle ne tient pas compte des ascendances et descendances verticales dans la couche limite planétaire. De nouveaux modèles, appelés flux de masse, donnent une paramétrisation des mouvements d'air dans une parcelle physique de GCM. On peut ainsi tenir compte de la variation de densité de l'air si une espèce condense, ce qui va générer des mouvements verticaux.
La turbulence est le mouvement chaotique de l'air en dehors du régime laminaire. On en tient compte avec une paramétrisation qui donne l'effet des mouvements turbulents à grande échelle. Ceci est particulièrement pertinent pour les mouvements proche du sol, où la différence de température entre la surface chauffée par le soleil et l'atmosphère crée de la turbulence pendant le jour.
Ce schéma représente les flux de masse convectifs tels que paramétrisés dans un GCM. w : vitesse verticale. Le flux de masse f dépend de l'ascension a (depuis la surface) et e (au dessus), ainsi que de la descendance d.
Crédit :
Rio et Hourdin, 2008
Surface et sous-sol
Les planètes telluriques possédent une surface solide ou liquide avec laquelle l'atmosphère est en interaction. Ces interactions se font au travers des flux radiatifs (provenant de l'étoile, de l'atmosphère et de la surface), du transfert de chaleur entre l'air et la surface par convection, et la libération de chaleur par changement de phase d'un solide ou d'un liquide à la surface (typiquement, la condensation de la vapeur d'eau). La surface planétaire joue donc un rôle important dans le forçage de l'atmosphère à sa base.
La diffusion de chaleur dans le sous-sol joue un rôle à la surface, et il est nécessaire d'en tenir compte. Ainsi, de nombreux GCMs possèdent un modèle de sous-sol pour l'équation de diffusion de la chaleur, divisé en niveaux verticaux de plus en plus profonds (jusqu'à typiquement quelques mètres), de la même manière que l'atmosphère est représenté en niveaux verticaux de pression. Chaque niveau vertical a des propriétés qui dépendent des caractéristiques supposées du sous-sol.
Certains corps peu irradiés, comme Pluton et Triton, voient leur atmosphère dominée de manière importante par la surface et le sous-sol. Pour ces exemples, la chaleur stockée dans le sous-sol met plusieurs siècles à être restituée à la surface, ce qui nécessite une initialisation méticuleuse du modèle de sous-sol.
Cette approche de modélisation du sous-sol convient également dans le cas d'un océan liquide. Toutefois, un plus grand réalisme requiert de prendre en compte la circulation océanique, ce qui peut se faire grâce au couplage avec un modèle d'océan dédié.
Un GCM de planète gazeuse ne modélise évidemment pas la surface. Il se contente de représenter l'atmosphère jusqu'à une certaine pression, et utilise un forçage de flux radiatif, tout en imposant les flux verticaux de masse à zéro.
Image du sol martien transmise par la sonde Phoenix. On peut voir que le souffle des tuyères a mis à jour de la glace d'eau enfouie sous le sol. Cette glace est présente sur des portions importantes de Mars et possède une inertie thermique élevée qui doit être prise en compte dans un GCM.
Crédit :
Marco di Lorenzo, Kenneth Kremer, Nasa / JPL / UA / Max Planck Institute / Spaceflight
Exercice
Difficulté : ☆☆☆
L'équation de diffusion de la chaleur unidimensionnelle dans le sous-sol est donnée par avec la capacité thermique volumique et la conductivité thermique du matériau. On veut simuler au moyen d'un GCM une planète dont la surface est recouverte d'une épaisse couche de glace.
On prendra pour une valeur de 2 J.cm-3.K-1 et pour une valeur de 2.4 W.m-1.K-1, et on supposera les propriétés de la glace constantes et homogènes sur toute la planète.
Question 1)
Sachant que sur cette planète une année dure 150 jours terrestres, quelle doit-être est la profondeur minimale du modèle de sous-sol ?
Considérer que le forçage au niveau de la température de surface s'écrit sous la forme avec et deux températures constantes et une pulsation...
...puis en déduire que le champ de température dans le sous-sol prend la forme avec et des termes dépendant de , et
Question 2)
Comment faut-il espacer les niveaux verticaux du modèle de sous-sol ?
Analyser le champ de température pour deux pulsations différentes
Aérosols et nuages
On a vu à quel point les aérosols jouent un rôle important en raison du transfert radiatif. Au-delà de leur impact sur les températures, leur étude en soi nous permet de mieux comprendre comment certaines espèces sont transportées à grande échelle et se déposent en surface.
Un aérosol est transporté horizontalement par la dynamique en tant que traceur. Dans la partie physique, on cherche à comprendre, en plus de leur effet radiatif, comment ils vont se former et se répartir sur l'axe vertical. Pour cela, on doit disposer d'une modélisation qui nous permette de calculer les tailles des particules des aérosols. Cette taille peut être établie de manière empirique, ou calculée à partir d'équations décrivant les processus de changement de phase.
Ces aérosols peuvent servir de noyaux de condensation (ou CCN) sur lesquels peuvent venir se condenser certaines espèces gazeuses, pour ensuite former des nuages. C'est par exemple le cas avec la formation de nuages d'eau (sous forme de cristaux de glace ou de gouttelettes liquides) sur Terre ou encore de nuages de glace de dioxyde de carbone (CO2) sur Mars. Sur certaines exoplanètes, on a même par exemple observé des nuages de chlorure de potassium ou de sulfure de zinc. Comme nous l'enseigne si bien la Terre, les nuages ont un rôle essentiel sur le bilan radiatif des planètes.
Lors d'un changement de phase (gaz → solide/liquide), la libération de chaleur latente doit également être prise en compte. La prise en compte de cet effet est notamment critique pour un GCM terrestre, étant données les grandes quantités d'eau pouvant s'évaporer ou se condenser dans l'atmosphère de notre planète. C'est par exemple un point clé pour comprendre l'échange de chaleur des basses vers les moyennes latitudes terrestres.
En pratique, la discrétisation d'un GCM repose sur des cellules de grande taille, qui représentent l'état moyen de l'atmosphère en leur sein. Pour représenter l'effet radiatif des nuages dans l'atmosphère d'une planète, il faut calculer proprement la fraction nuageuse dans chaque cellule du GCM, c'est-à-dire calculer la proportion (de la surface horizontale) de cette cellule où se trouve les nuages. Il existe un certain nombre de techniques plus ou moins sophistiquées qui permettent de traiter ce problème de recouvrement, mais cela dépasse le cadre de ce cours.
Des nuages de cristaux d'eau dans l'atmosphère de Mars vus par la sonde Phoenix.
Crédit :
Wikipédia
Ce cliché pris par la sonde Mariner 10 montre l'épaisse couche de nuages composée principalement d'un mélange H2SO4-H2O qui recouvre l'intégralité de Vénus.
Crédit :
Nasa
Quelques spécificités
À titre d'exemple, voici quelques spécificités propres à plusieurs corps planétaires, qui sont autant de "briques" à ajouter dans la partie physique :
Un modèle de (photo)chimie, qui tient compte des réactions entre les différents composants de l'atmosphère. Il en résulte des changements de composition qui ont un impact sur l'atmosphère, par exemple au moyen du transfert radiatif. Pour modéliser l'atmosphère de Titan, le photochimie joue un rôle prépondérant. Pour modéliser l'atmosphère des exoplanètes géantes chaudes et gazeuses (les Jupiter chauds), c'est même la chimie hors équilibre qui devient importante.
Les sources d'aérosols. Par exemple, Mars est une planète dont la structure thermique de l'atmosphère est complétement dominée par les poussières en suspension dans l'air. La quantité de poussière soulevée depuis le sol est une donnée importante pour la compréhension et la modélisation de l'atmosphère, qui peut donner lieu au développement d'un modèle spécifique.
La thermosphère, qui est une région où les hypothèses classiques d'un fluide atmosphérique ne sont plus les mêmes. La densité est si faible que l'équilibre thermodynamique local, qui stipule que la température est spatialement homogène à l'échelle miscropscopique, n'est plus respecté. Ceci nécessite une adaptation du transfert radiatif.
En pratique
En pratique, un GCM est un programme informatique qui exécute des instructions résumées dans un code écrit dans un certain langage. En général, les modélisateurs optent pour le langage Fortran car il possède de nombreuses librairies mathématiques, est rapide dans l'exécution du programme généré, et on peut miser sur l'héritage de modèles plus anciens qui utilisaient eux aussi le Fortran il y plusieurs décennies.
Un GCM cumule au minimum des dizaines de milliers de lignes de code et requiert un investissement conséquent pour être développé et mis à jour.
Un exemple de code informatique en langage Fortran tel qu'utilisé dans la programmation d'un GCM. On voit ici la portion du programme où on a recours à la brique physique dont les tendances sont transmises à la brique dynamique.
Crédit :
LMD
Le temps de simulation est également un paramètre important à prendre en compte : on ne peut pas faire le même type d'étude selon qu'une simulation dure 5 minutes ou 5 mois. Dans le premier cas on peut par exemple envisager un nombre très important de simulations pour explorer la sensibilité du modèle à de multiples paramètres, tandis que dans le second cas la simulation sert de réference qui sera analysée en détail et on évitera à tout prix une erreur en amont, avant l'exécution du modèle. Il serait difficile de donner un chiffre typique sur le temps de simulation, étant donné qu'il dépend des ressources informatiques et de la résolution, du pas de temps, et de la configuration du modèle. Toutefois, afin de donner un ordre de grandeur, on peut avancer un rapport pouvant varier dans la plupart des cas de 100 à 10 000 entre le temps simulé et le temps réel d'exécution d'un GCM.
Exercice
Difficulté : ☆
Cet exercice a pour but d'estimer la taille d'un fichier de sortie d'une simulation de GCM.
Considérons un exemple représentatif : on simule une planète dont le jour solaire est de 24h et l'année dure 100 jours.
La grille utilisée est de type latitude-longitude, avec respectivement 48 et 64 points dans ces dimensions, et 20 niveaux verticaux.
Question 1)
Combien de points la grille contient-elle au total ?
Question 2)
On souhaite pourvoir étudier la circulation atmosphérique. Combien de variables utiliseriez-vous ?
Question 3)
Les variables sont écrites dans le fichier de sortie 6 fois par jour pour bien représenter le cycle diurne. Une valeur est représentée au moyen de 4 octets. Quelle est la taille informatique d'un fichier de sortie pour une année de simulation ? Qu'en pensez-vous ?
Utiliser un GCM chez soi
Il existe des dizaines et des dizaines de GCM différents de par le monde, utilisés avec des buts parfois différents. Un moyen simple d'utiliser soi-même un GCM est d'utiliser une version simplifiée, développée à des fins éducatives ou de validation. Leur prise en main est plus simple et plus rapide qu'un GCM classique, bien qu'il faille également y consacrer un certain temps pour installer, utiliser et interpréter le modèle.
On peut citer :
PLASIM (PLAnet SIMulator) qui peut être utilisé pour la Terre, Mars et Titan.
SPEEDY (Simplified Parameterizations, primitivE-Equation Dynamics) qui est un modèle à 7 niveaux verticaux pour l'atmosphère terrestre.
Climate prediction Un projet de science citoyenne qui propose d'utiliser les ressources de votre ordinateur pour générer des prédictions de changement climatique sur Terre.
LAPS Un modèle de climat 1-D interactif pour modéliser les atmosphères de planètes terrestres. Il correspond à la partie physique du GCM "Générique" développé au Laboratoire de Météorologie Dynamique, à Paris.
Autres types de modèles
De manière plus générale, il existe toute une hiérarchie de modèles numériques de climat qui permettent de simuler l'atmosphère des planètes. Par exemple, les modèles Mésoéchelle ou LES (pour Large Eddy Simulation) et modèles CRM (pour Cloud Resolving Model) permettent de simuler l'atmosphère à des échelles beaucoup plus fines que les GCM, afin de modéliser toutes les processus dynamiques et physiques qui y opèrent (par exemple la convection).
Ces types de modèles (Mésoéchelle, LES, CRM) sont très coûteux en temps de calcul du fait de leur résolutions spatiale et temporelle plus fines qu'un GCM. On les utilise généralement dans une région spécifique de la planète, pour comprendre et quantifier des mécanismes physiques qui ne peuvent pas être résolus par les GCMs. Ces types de modèles sont donc généralement utilisés de manière complémentaire aux GCMs, par exemple pour fournir des paramétrisations physiques de processus sous-maille aux GCMs.
1)
Pourquoi utilise-t-on un GCM pour simuler l'atmosphère des exoplanètes ?
2)
Usuellement, comment appelle-t-on les deux constituants majeurs d'un GCM ?
QCM 2
Question de cours
1)
Pourquoi appelle-t-on plus souvent la partie dynamique que physique ?
2)
L'ordre de grandeur de la résolution horizontale d'un GCM est de :
3)
Quel est la grandeur utilisée pour l'échelle verticale d'un GCM ?
4)
Dans un GCM, le transfert radiatif est :
Exercices
Exercice
Question 1)
Vous oubliez de brancher la physique dans votre GCM de planète tellurique. Que peut-il se passer au niveau des résultats ?
Exercice
Question 1)
Vous avez un modèle de dimension N_longitude x N_latitude et vous passez 2N_longitude x 2N_latitude. Que faut-t-il faire pour respecter la condition CFL ? A priori, par combien sera multiplié le temps de calcul ?
Question 2)
On souhaite simuler avec un GCM une atmosphère de diazote pour une planète d'un rayon de 6000 km. On sait par ailleurs, en considérant le flux radiatif de l'étoile et sa distance à la planète, que la température maximale dans cette atmosphère n'excèdera pas 400 K. On demande à un étudiant d'effectuer une première simulation de cette atmosphère. L'étudiant propose d'utiliser une grille latitude-longitude avec 100 points en longitude et 100 points en latitude et un pas de temps dynamique de 20 minutes. On lui répond que sa simulation échouer. Pourquoi cela ?
Calculer la vitesse de l'onde la plus rapide ...
... puis appliquer la condition CFL.
Mini Projet
GCM en ligne
Ce mini projet vise à prendre en main un GCM à partir de résultats de simulations et d'une interface dédiée.
On se propose pour cela de voir la sensibilité d'un GCM, et tout particulièrement la circulation atmosphérique, à la période de rotation et à la taille d'une planète.
La configuration du modèle est la suivante :
Grille longitude-latitude avec 64 points en longitude et 32 en latitude
15 niveaux verticaux en coordonnées pression
Un rappel newtonien pour la physique
On se propose de voir la sensibilité de ce GCM à la période de rotation et à la taille de la planète.
Pour ce faire, on utilise 3 rayons et 6 périodes de rotations différentes, formant donc un total de 18 simulations.
Les variables disponibles en sortie sont :
Pour chaque simulation, 60 pas de temps ont été stockés, avec une écriture de 1m 20s entre deux pas de temps :
Exercice
Question 1)
Calculer le temps nécessaire pour effectuer une simulation.
C'est aussi simple que ça.
Question 2)
Le coefficient de super-rotation est le rapport entre le vent zonal et la vitesse du sol due à la rotation de la planète. Comment exprime-t-on ce coefficient en fonction du vent et des caractéristiques de la planète ?
Question 3)
Calculer la taille occupée sur le disque par toutes les simulations.
Combien de simulations ?
Combien de variables par simulation ?
Combien de valeurs par variables ?
Combien d'octets pas valeur ?
Question 4)
Le calcul a été effectué grâce à un processeur cadencé à 3.6 GHz. Donner des arguments qui expliquent pourquoi les simulations ont été précalculées avant que vous ne les utilisiez. Quel est l'inconvénient ?
C'est une question de temps et de mémoire.
Un rappel newtonien a été utilisé pour simuler la partie physique. Cela consiste, à chaque appel à la physique, à relaxer le champ de température vers une température de référence imposée . On utilise la formulation donnée par Held & Suarez, Bulletin of the American Meteorological Society, vol. 75 , N°10, Octobre 1994. Le terme correctif est :
avec un coefficient de rappel dépendant de la latitude et de la coordonnée hybride (où est la pression et la pression de surface).
La loi pour et est :
Exercice
Question 1)
Analyser l'expression de la température de référence : comment varie-t-elle avec la latitude et l'altitude ?
Physiquement, à quoi correspond ?
Question 2)
Analyser l'expression du coefficient de rappel : comment varie-t-il avec la latitude et l'altitude ?
Pourquoi le rappel dépend-il ainsi de la latitude et de l'altitude ?
Question 3)
Comment sont représentés les jours et les saisons dans un GCM utilisant ce rappel newtonien ?
À quoi correspond la variable temporelle ?
Question 4)
Comment est modélisée la surface ?
Question 5)
Selon vous, pour quelles raisons utiliser ce rappel en lieu et place d'une physique plus complète ?
Exploration des données
Il s'agit de prendre en main les données et de se familiariser avec l'exploration de champs de 2 à 6 dimensions.
Manuel de l'utilisateur
L'interface de GCM en ligne permet d'afficher une variable du GCM. Chaque variable possède au plus 6 dimensions, tandis qu'une figure comporte 1 à 3 dimension(s) (une dimension suivant l'axe des abscisses obligatoirement, une dimension suivant l'axe des ordonnées, et une dimension temporelle pour le défilement). En effet, un être humain peut difficilement appréhender un jeu de données à plus de 3 dimensions d'un seul coup d'oeil. Pour visualiser une variable il s'agit donc de réduire le nombre de dimensions d'une variable. Pour cela on choisira, sur une à plusieurs dimensions, une valeur ou une moyenne sur un intervalle de valeurs.
Dimensions
Nombre de valeurs
Valeurs
Remarques
Variables
Température
Vents
Pression de surface
Flux de masse
Super-rotation
Période de rotation
6
5h - 10h - 24h - 72h - 240h - 2400h
Chaque valeur correspond
à une simulation différente
X
X
X
X
X
Rayon de la planète
3
0.5, 1 et 2 rayons terrestres
X
X
X
X
X
Latitude
48
-90° à 90°
Vu le grand nombre de points,
l'interface sélectionne la valeur
la plus proche du curseur de la réglette
X
X
X
X
X
Longitude
64
-180° à 180°
X
X
X
X
Altitude
15
1 bar à 0.5 mbar
Valeurs suivant une
décroissance logarithmique
X
X
X
X
Temps
60
0 à 60 unités
X
X
X
X
Exercice
Question 1)
Afficher la température et la pression de surface au niveau du sol, puis à d'autres altitudes à un instant donné ou en faisant défiler les instants sur un intervalle de temps. Comment évolue le champ de pression de surface en demandant différentes altitudes ? Pourquoi ?
Question 2)
Afficher un profil vertical de température à l'équateur.
Question 3)
Afficher le champ de température et la pression de surface en moyenne zonale, puis la température et le vent zonal. Que remarquez-vous ? Pourquoi ?
Question 4)
Un diagramme de Hovmöller permet de visualiser la propagation d'ondes, en affichant un champ en fonction du temps et de la longitude ou latitude. Faire un tel diagramme sur le champ de votre choix et estimer la ou les période(s) des ondes présentes.
Question 5)
Afficher la température en fonction de la latitude et de la vitesse de rotation, à une altitude donnée et en moyenne zonale.
Question 6)
Afficher la pression de surface en fonction de la vitesse de rotation et du rayon de la planète.
-------------FIN DU CHAPITRE -------------FIN DU CHAPITRE -------------FIN DU CHAPITRE -------------FIN DU CHAPITRE -------------
Dans la recherche des exoplanètes, une question passionne les astrophysiciens et bien plus encore le reste de l'humanité : y a-t-il de la vie sur une autre planète ? La Terre prouve qu'un certain type de vie basée principalement sur le carbone peut exister. Reste à savoir si les processus ayant permis l'émergence de cette vie sur la Terre ont pu se produire sur une autre planète. La question de la vie extraterrestre ne se pose pas en terme de possibilité mais en terme de sa probabilité, de sa fréquence d'apparition.
La première partie de ce cours utilise les propriétés des exoplanètes pour faire découvrir la statistique, cet outil mathématique indispensable dans les sciences et en particulier en astronomie. La seconde partie du cours généralise et clarifie les notions mathématiques importantes du point de vue des probabilités. La troisième partie met à disposition des séries d'exercices pour tester les connaissances. Enfin la dernière partie est un test des connaissances mêlant statistiques et probabilités, mêlant cours et observations.
Dans la première partie des cours, des valeurs statistiques concernant la population des exoplanètes sont données pour illustrer les concepts présentés. Le nombre d'exoplanètes augmentant très rapidement, les paramètres statistiques évoluent aussi. Les valeurs actualisées peuvent être calculées à partir du catalogue.
Ce cours s'adresse à des étudiants de niveau L1 et plus. Il ne requiert aucune connaissance sur les probabilités ou la statistique.
Statistique des exoplanètes
Auteur: Sylvain Fouquet
Introduction
Planètes du système solaire
Planètes et planètes naines (encadrées sur fond marron) découvertes dans le système solaire.
Crédit :
http://mash.wifeo.com/astronomie.php
Cette première partie du cours s'intéresse à la statistique à travers le cas particulier des exoplanètes. Cet outil mathématique sert à extraire de l'information de grands échantillons de mesures. Les concepts statistiques décrits ici pour les exoplanètes sont généralisables dans d'autres cas. La statistique découle naturellement de questions scientifiques telles que "combien y a-t-il de planètes dans notre galaxie ?" ou encore "quelles masses ont elles ?" ou "quelles sont leurs distances à leurs étoiles hôtes ?". Ces questions sont déterminantes pour comprendre la formation et l'évolution des planètes et pour aider à la recherche d'une vie extraterrestre.
Avant les années 90, la connaissance sur les planètes se limitait aux neuf planètes du système solaire, Mercure, Vénus, la Terre, Mars, Jupiter, Saturne, Uranus, Neptune, Pluton. L'étude des exoplanètes n'existait pas faute d'observation. Il semblait cependant probable que d'autres planètes existaient autour d'autres étoiles que le Soleil, la formation d'une planète ne semblant pas un mécanisme requérant des conditions très spécifiques. Bien qu'Aleksander Wolszczan ait découvert des exoplanètes en septembre 1990 avec le radiotélescope Arecibo autour du pulsar PSR B1257+12 (une étoile en fin de vie, très dense avec une rotation très rapide), la science des exoplanètes a réellement débuté en 1995 avec la découverte de "51 Pegasi b" autour d'une étoile de type solaire par Michel Mayor et Didier Queloz. Plus de dix ans après, près de deux milles exoplanètes ont été découvertes et ce chiffre ne cesse de croître.
En plus des planètes du système solaire, des planètes naines ont été découvertes telles que Cérès. Pluton fut rétrogradée de son rang de planète pour devenir une planète naine.
Avec près de 2000 exoplanètes, des études statistiques permettent de découvrir des propriétés statistiques contraignant les modèles de formation et d'évolution des planètes. Le diagramme de Hubble pour les galaxies et le diagramme Hertzsprung-Russell pour les étoiles sont autant d'outils statistiques fondamentaux pour l'étude des galaxies et des étoiles.
Différentes propriétés sont mesurables pour chaque exoplanète : la masse, le rayon, le type spectral de l'étoile hôte, ... Cette première partie du cours utilise ces grandeurs pour caractériser les exoplanètes et en même temps pour introduire des concepts de statistique qui seront repris d'un point de vue probabiliste dans la seconde partie du cours.
L'échantillon statistique
Définition
Les études statistiques portent sur l'étude d'un échantillon de mesures. Cet échantillon est un ensemble de résultats, de nombres, acquis soit par la répétition d'une même expérience soit par la collection d'observations faites sur le même sujet. Par exemple, le résultat de dix lancers d'un dé, ou de dix dés lancers une fois, forme un échantillon de l'expérience "lancer de dé". Je peux faire la même chose avec des pièces ou des cartes. Moins classique, le résultat d'une pêche peut être vu comme un échantillon statistique des poissons se trouvant là où est le pêcheur. De ce dernier ensemble, la taille des poissons, leurs poids, etc, peuvent être étudiés. Un échantillon se caractérise par son nombre d'éléments. Plus un échantillon est grand, plus son étude est riche et précise.
L'échantillon des exoplanètes
Dans l'étude des exoplanètes, il s'agit de regarder un phénomène qui s'est répété : la formation d'exoplanètes. L'échantillon est donc constitué des exoplanètes découvertes. Actuellement l'échantillon d'exoplanètes connues comporte 1951 (au 8 septembre 2015) exoplanètes situées dans 1235 systèmes exoplanétaires. En effet, certains systèmes planétaires ont plusieurs exoplanètes. Les données utilisées dans ce cours sont fournies par la page internet exoplanet.eu/catalog. De cet échantillon d'exoplanètes, il est possible d'extraire différents échantillons, celui de des masses, des rayons, des eccentricités, etc, puis de les étudier.
Représentativité d'un échantillon
En statistique, le premier souci est la représentativité d'un échantillon. Pour bien comprendre la notion de représentativité, les sondages politiques sont pédagogiques. Durant une élection, un sondage doit donner approximativement le pourcentage de votes qu'obtiendra chaque candidat. Pour ce faire, un échantillon, de 1000 français par exemple, est sondé sur leurs futurs votes. Les sondeurs peuvent alors tirer des conclusions sur l'issue probable du résultat en faisant l'hypothèse que les 60 millions de français vont se comporter comme ces 1000 personnes. Dans ce cas, l'échantillon de 1000 personnes est dit représentatif de la totalité des français. L'échantillon peut cependants être biaisé si le sondeur ne sélectionne que des personnes ayant la carte du premier parti de droite ou bien des personnes lisant uniquement la presse dite de gauche. Il faut donc veiller à corriger le biais s'il est bien connu.
L'obtention d'un échantillon représentatif, sans biais, est une chose facile en théorie mais difficile en pratique. En théorie, il suffit de sélectionner un échantillon de manière aléatoire. Pour les élections, il suffit de tirer un certain nombre de français au hasard. Pour les exoplanètes, cette méthode est impossible pour la simple raison que toutes les exoplanètes de notre galaxie ne sont pas encore connues. Il existe en effet plusieurs biais qui font que certaines exoplanètes peuvent être surreprésentées par rapport à d'autres. Par exemple, les planètes très massives avec un grand rayon et très proches de leurs étoiles auront tendance à être plus facilement détectables et donc à être surreprésentées par rapport aux planètes de type terrestre qui sont petites, peu massives et loin de leurs étoiles hôtes. Toute étude statistique doit alors bien identifier ses biais afin de ne pas tirer de fausses conclusions. Un échantillon d'exoplanètes peut être complet jusqu'à une certaine limite de masse, de taille, de distance au soleil mais pas au-delà. Le travail du statisticien est de trouver cette limite pour tirer des conclusions non biaisées.
Extremum, médiane, quartile
Dans cette section du cours, nous illustrons les principales valeurs statistiques en utilisant la variable "masse" des exoplanètes.
Extremum
Les premières valeurs pour caractériser l'échantillon des masses des exoplanètes sont les valeurs minimale et maximale. Elles sont de et 47 ; la Terre faisant par comparaison . Les masses sont données dans l'unité de la masse de Jupiter, , qui fait kg ou 317,8 masses terrestres . Ce premier critère statistique montre que la masse des planètes découvertes varie sur près de six ordres de grandeur. Cela ne prouve en aucun cas qu'il n'existe pas de planètes plus ou moins massives.
Médiane
Une autre valeur statistique est la médiane. Cette dernière partage l'échantillon en deux parts égales de telle manière qu'il y a autant de masses inférieures que supérieures à elle. Pour la calculer, il faut tout d'abord trier les masses en ordre croissant. Si le nombre de masses, , est impair la valeur de la
médiane est celle de la ème masse. Si le nombre de masse est pair, la médiane se calcule par la moyenne de la et ème masses. Dans le cas des 1795 exoplanètes découvertes, seules 1032 ont une masse mesurée ; un nombre pair, donc la médiane correspond à la moyenne des masses des exoplanètes numéros 1032/2 = 512 et (1032+1)/2 = 513 qui est la masse 0,96 .
Quartiles
Il est aussi possible de connaître la valeur qui marque le premier quart, nommée premier quartile, (0,197 ) ou le dernier quart, nommée dernier quartile (2,75 ) de l'échantillon. Pour un échantillon de taille , le premier quartile se calcule en prenant la valeur , si est un multiple de 4, ou la valeur de l'entier supérieur. Pour le dernier quartile, c'est la même méthode mais en utilisant . L'écart entre le premier et le dernier quartile est nommé l'écart interquartile.
La boîte à moustaches
Boîte à moustaches
Boîte à moustaches schématisant la distribution des masses des 1032 exoplanètes de l'échantillon. L'axe horizontal représente les masses en échelle logarithmique. Ce schéma résume les cinq valeurs statistiques de la distribution de masse des exoplanètes qui sont par ordre croissant : le minimum (à gauche), le premier quartile (la côté gauche du rectangle), la médiane (le trait au centre du rectangle), le troisième quartile (le côté droit du rectangle) et le maximum (à droite).
Crédit :
Sylvain Fouquet
Boîte à moustaches
Toutes les informations statistiques décrites précédemment peuvent être résumées graphiquement par un schéma appelé la boîte à moustaches. Ce schéma montre les extrema reliés aux quartiles par des segments de droite (les moustaches) et les quartiles reliés à la médiane par des rectangles. La figure ci-dessus illustre une boîte à moustaches dans le cas des masses des exoplanètes. Cette visualisation graphique permet de décrire rapidement comment sont réparties les valeurs. Si les moustaches sont très grandes, cela signifie que les valeurs sont concentrées autour de la médiane. Au contraire, des rectangles de grande taille montrent une distribution dispersée.
Dans le cas de la masse des exoplanètes,cl'écart interquartile, c'est à dire l'écart entre le 1er quartile (0,197 MJ) et le 3ème quartile (2,75 MJ), est de 2,553 MJ.
La dispersion des masses des exoplanètes ne semble pas étendue, mais rappelons que, comme l'échantillon est biaisé vers les grandes masses, ce résultat est sûrement à revoir.
Moyenne et écart-type
Moyenne
Une autre méthode pour décrire un échantillon comme celui des masses d'exoplanètes est la détermination de la moyenne et de l'écart-type. La moyenne d'une variable pour un échantillon de taille est :
Pour notre 'échantillon d'exoplanètes, la masse moyenne est 2,762 , très proche de la médiane à 2,75 .
Ecart-type
En plus de la moyenne, il est utile de savoir si les valeurs sont concentrées autour de la moyenne ou bien dispersées. Cette information est fournie par l'écart-type, noté qui se définit par la moyenne des distances à la valeur moyenne. Il faut donc calculer tout d'abord toutes les distances au carré (le carré pour avoir des distances positives), de la moyenne à chaque valeur de l'échantillon, . La moyenne de donne le carré de :
L'écart-type de l'échantillon des masses des exoplanètes vaut 4,75 . Cela est presque deux fois plus grand que l'écart interquartile.
Histogrammes
Histogrammes des masses
Histogrammes des masses des planètes du système solaire (gauche) et des exoplanètes (droite). L'échelle des masses est en échelle logarithmique par soucis de clarté.
Crédit :
Sylvain Fouquet
Histogramme
Les outils statistiques précédents sont pertinents lorsqu'il s'agit de distributions centrées autour d'une valeur. Dans le cas des planètes du système solaire, les masses sont soit petites (de l'ordre de la masse de la Terre), soit plus massives (de l'ordre de la masse de Jupiter). Cette distribution des masses, en plus d'autres propriétés physiques telles que la taille et la composition chimique, est à la base de la distinction entre les planètes gazeuses et les planètes telluriques.
Calculer la moyenne ou faire une boîte à moustache de l'échantillon des masses des planètes du système solaire ne permet pas de faire la distinction entre planètes telluriques et gazeuses.
Pour avoir une idée plus juste de la répartition des valeurs d'un échantillon, l'histogramme est un outil statistique plus approprié. Il requiert de calculer le nombre d'éléments de l'échantillon inclus dans des intervalles réguliers entre les extrema. L'avantage de l'histogramme est qu'il présente une vision claire de la distribution de notre échantillon. Mais si une taille des intervalles : est trop petite, il n'y aura qu'un ou bien zéro élément de l'échantillon dans chaque intervalle. A l'inverse si les intervalles sont trop grands, il ne sera plus possible de distinguer les pics dans la distribution. Un bon choix pour le nombre d'intervalles est important. Si, par exemple, on divise le nombre total d'éléments de l'échantillon par N = 10, et que la distribution est uniforme, chaque intervalle devrait avoir à peu près 10 représentants.
Dans le cas du système solaire, la figure de gauche montre qu'il y a deux pics dans la distribution des masses des planètes autour des masses , la masse de la Terre, et , la masse de Jupiter. L'histogramme des masses donne donc plus d'information que simplement une valeur centrale et une dispersion autour de cette valeur. Dans le cas de l'échantillon de toutes les masses connues des exoplanètes (figure de droite), l'histogramme montre que la répartition des exoplanètes a un pic aux alentours de . De plus, le nombre d'exoplanètes avoisinant la masse de la Terre semble très faible. Encore une fois, cette propriété provient très probablement du biais observationnel qui privilégie les planètes massives et ne signifie en aucun cas que les planètes telluriques sont rares.
Fonctions de distribution
Fonctions de distributions des masses
Histogrammes (gauche) et fonctions de distribution (droite) des masses des planètes du système solaire (haut) et des exoplanètes (bas). L'échelle des masses est en échelle logarithmique par soucis de clarté.
Crédit :
Sylvain Fouquet
Pour pallier le problème de la taille des intervalles pour les histogrammes, les statisticiens ont défini la fonction de distribution. Au lieu de calculer le nombre d'occurences dans un intervalle, la fonction de distribution donne le nombre d'occurences inférieures à une valeur. Par souci de comparaison, la fonction de distribution est normalisée, elle est divisée par le nombre total d'éléments de l'échantillon : . Elle ne peut donc dépasser 1. Dans notre cas, ce
nombre est le nombre total d'exoplanètes découvertes : 1032. Le grand avantage comparé à l'histogramme est qu'il n'existe qu'une fonction de distribution pour un échantillon, alors qu'il existe un grand nombre d'histogrammes du fait du choix de la taille de l'intervalle. La fonction de distribution est clairement définie et se trouve donc être très appréciée en théorie des probabilités. La fonction de distribution des masses des exoplanètes fournit, entre autres choses, le nombre d'exoplanètes ayant une masse inférieure à 1 , , ou à une masse terrestre, . La figure en bas à droite montre cette fonction.
En dessous de la valeur minimale d'un échantillon, cette fonction est nulle. Au delà de la valeur maximale, elle vaut 1. Cette fonction est à créneaux. En passant d'une valeur de l'échantillon à une valeur plus grande elle augmente de la valeur du fait de la normalisation. Entre les deux valeurs, elle est constante. Cette fonction est par construction croissante. Les "créneaux" se distinguent bien pour des échantillons avec un faible nombre d'éléments comme avec les masses des planètes du système solaire mais presque plus lorsque ce nombre est grand pour les exoplanètes (voir figures de droite).
Comme à chaque échantillon correspond une unique fonction de distribution, il est pertinent de comparer deux fonctions de distribution. Cette comparaison indique si deux échantillons ont des propriétés similaires ou différentes. Dans le cas des planètes du système solaire comparé aux exoplanètes, il y a beaucoup de différences. Les masses des planètes du système solaire commencent à alors que celles des exoplanètes à , bien qu'il y ait quelques traces d'exoplanètes en deçà de cette valeur. La pente globale de la fonction de distribution du système solaire semble régulière alors que celle des exoplanètes connaît une augmentation autour de la valeur 0,17 .
Statistique multidimensionnelle
Masse, Rayon, demi-grand axe
Gauche : Masse des exoplanètes en fonction du rayon (points) avec le cas particulier des planètes du système solaire (étoiles). Droite : demi-grand axe des exoplanètes en fonction de leur masse toujours avec le cas des planètes du système solaire (étoiles).
Crédit :
Sylvain Fouquet
Dans ce cours, la masse des exoplanètes a été étudiée de manière indépendante des autres grandeurs des exoplanètes. Cependant, elle peut être étudiée en parallèle d'autres propriétés. Dans ce type d'étude, des corrélations entre grandeurs sont recherchées. Par exemple, si la densité des exoplanètes, , était constante, ce qui est faux dans notre système solaire, alors le rayon, , d'une exoplanète devrait être directement corrélé avec sa masse totale, , par la loi . Un graphique ayant comme abscisse le rayon au cube et comme ordonnée la masse montrerait une droite qui permettrait de calculer , son coefficient directeur. Dans les faits, la densité des exoplanètes n'est pas constante.
En effet, la figure de gauche montre le graphique de la masse des exoplanètes en fonction de leur rayon avec en plus le cas des huit planètes du système solaire. Deux régions plus peuplées ressortent du graphique. La première comporte des planètes de la masse de Jupiter. Dans l'autre région, les exoplanètes ont une masse d'un ordre de grandeur plus petit que Jupiter mais un rayon de 3 à 40 fois supérieur à celui de Jupiter. Les planètes de type Terre, Vénus, Mars ou Mercure sont beaucoup plus rares. Cela est seulement dû aux biais observationnels déjà mentionnés. Ce graphique montre que notre système solaire bien qu'ayant huit planètes ne contient aucune planète du type planète supergéante avec des rayons en moyenne de près de 20 fois le rayon de Jupiter. Il faut aussi se méfier de ces mesures. De telles planètes auraient, et même dépasseraient, la taille du soleil.
La figure de droite illustre le lien entre la distance exoplanète-étoile et la masse des exoplanètes. Là encore, le groupe des masses de Jupiters se distingue. Elles sont très largement aux alentours de 0,05 U.A., bien plus proche que Mercure du Soleil. Ces planètes sont donc des planètes massives collées à leurs étoiles hôtes. Elles sont alors nommées des Jupiter chauds. Encore une fois leur grand nombre apparent est très certainement dû aux observations qui détectent plus facilement ce type de planètes du fait de leurs masses et de la proximité à leurs étoiles hôtes. La grande majorité des autres exoplanètes se situent en dessous d'une U.A. Des ensembles d'exoplanètes forment des traits dans le graphique, par exemple pour la distance de 1 U.A. Cela ne signifie pas qu'il y a de nombreuses planètes se situant à 1 U.A. faisant de cette valeur une valeur exceptionnelle. Cela est sûrement dû à l'algorithme servant à mesurer le demi-grand axe qui favorise cette valeur. Il faut donc se méfier de ces valeurs. Dans ce graphique, davantage que dans le précédent, les planètes du système solaire ne semblent pas en concordance avec celles des exoplanètes. Même Jupiter qui était un cas favorable, se trouve ici avoir des propriétés bien différentes que ses homologues extra-solaires.
Statistique sur les étoiles hôtes I
Relation masse-taille des étoiles hôtes
Relation masse-rayon pour les étoiles hôtes des exoplanètes. La distribution montre que les étoiles hôtes ont des propriétés similaires à celles du soleil avec des masses comprises entre 0,5 et 1,5 masse solaire et des rayons compris entre 1 et 2 rayon solaire.
Crédit :
Sylvain Fouquet
Depuis le début de ce cours, seules les propriétés des exoplanètes ont été etudiées. Cependant beaucoup d'informations peuvent être aussi obtenues sur l'étoile hôte autour de laquelle l'exoplanète gravite. En voici les principales : type spectral, masse, rayon, position dans la galaxie ou encore métallicité.
Propriétés des étoiles
Une des premières études statistiques à entreprendre est la caractérisation des étoiles hôtes par leurs masses et leurs tailles. La figure ci-contre montre la relation masse-rayon des étoiles hôtes indiquant que la grande majorité des étoiles ont des masses et des tailles proches de celle du soleil (1 Mo, 1Ro) se situant au centre de la distribution. Cependant, il ne faudrait pas conclure trop hâtivement que seules les étoiles similaires au soleil pourraient abriter des exoplanètes. Notre étoile, le soleil, est une étoile typique parmi les étoiles du disque de la Voie Lactée ; donc lorsque les astrophysiciens cherchent des exoplanètes, ils les cherchent en majorité autour d'étoiles de type solaire. Il y a donc une surreprésentation de ce type stellaire dans l'échantillon des étoiles hôtes. Pour savoir si les exoplanètes peuvent se développer autour d'étoiles ayant des propriétés très différentes de celle du soleil, il faudrait observer un grand nombres d'étoiles de types différents.
L'échantillon actuel des étoiles hôtes ne permet pas une étude poussée pour connaître l'influence de l'environnement d'une étoile hôte sur son nombre d'exoplanètes. Les étoiles proches du soleil, se situant toutes dans le disque plutôt externe de la Voie Lactée, se trouvent dans un milieu peu dense par rapport à des étoiles au centre de la Voie Lactée dans le bulbe. Une étude sur la recherche d'exoplanètes faite dans l'amas globulaire 47 Toucan peut fournir une première indication. La densité de cet amas est bien plus grande que pour les étoiles autour du Soleil. 47 Toucan a de plus des étoiles de faible métallicité, une absence de gaz et des étoiles formées il y près de 12 milliard d'années. Le résultat de cette recherche est de n'avoir trouvé aucune exoplanète alors qu'une même étude faite au voisinage du soleil aurait permis d'en découvrir une vingtaine.
Ce résultat est cohérent avec ce que l'on attend de la formation des planètes. En effet, une étoile pauvre en métaux implique que son environnement est lui-même très probablement pauvre en éléments lourds donc en matériaux pour former une planète. Les amas globulaires sont connus pour être dépourvus de gaz ce qui entraîne l'impossibilité de la formation de planètes gazeuses. De plus un environnement dense n'est pas propice à la formation et à la stabilisation dans le temps d'un disque protoplanétaire autour d'une étoile. Ce disque pourrait avoir tendance à se disperser par interaction gravitationnelle . A l'opposé, il peut être aussi instructif de rechercher des planètes dans des milieux très peu denses comme dans le halo de la Voie Lactée ou dans les galaxies naines proches de la Voie Lactée afin d'être complet.
Statistique sur les étoiles hôtes II
Relation rayon stellaire vs demi-grand axe
Relation entre le rayon de l'étoile hôte et le demi-grand axe de son exoplanète. La ligne en trait plein montre la limite inférieure pour les demi-grands axes dus à la taille de l'étoile convertie en U.A. La ligne en pointillé montre le double des rayons stellaires.
Crédit :
Sylvain Fouquet
Nombre d'éxoplanètes par étoile
Il est pertinent de savoir si le nombre d'exoplanètes dépend de la masse, de la taille ou du type spectral de l'étoile hôte afin, par exemple, de rechercher des exoplanètes autour d'étoiles qui ont davantage de probabilité d'en abriter. La question "Quelle est la probabilité d'avoir une exoplanète autour d'une étoile" devient alors "Quelle est la probabilité d'avoir une exoplanète autour d'une étoile de type solaire, de type géante rouge de type naine blanche, etc". Cette question permet de se familiariser avec le concept de statistiques conditionnelles ou bayésiennes qui sera développé dans la partie du cours dédié à la théorie des probabilités. La question n'est plus seulement de connaître la probabilité d'avoir un résultat mais sa probabilité à condition qu'un autre évènement ait eu lieu.
Demi-grand axe de l'exoplanète en fontion du rayon de l'étoile
Pour illustrer le concept de statistiques bayésiennes, nous exploitons la figure ci-contre présentant le demi-grand axe des exoplanètes en fonction du rayon de leurs étoiles hôtes. Premièrement, il semble qu'une planète doit être assez éloignée de son étoile hôte durant son orbite sous peine de collision et de destruction. Cela interdit donc des demi-grands axes qui sont d'une taille inférieure à celle du rayon de l'étoile hôte. De plus si une planète a une excentricité forte proche de 1 alors un demi-grand axe élevé n'empêche pas une collision lorsque l'exoplanète passe au péricentre. Dans la figure ci-contre, la ligne en trait plein et celle en tirets montrent le demi-grand axe limite dû à la taille de l'étoile et à son double. Toutes les exoplanètes ont un demi-grand axe en dehors de ces limites ; toutefois, elles sont assez proches de leurs étoiles hôtes. En effet, un demi-grand axe d'une taille de seulement dix fois le rayon de l'étoile hôte est une propriété commune. Au contraire, dans notre système solaire, Mercure est déjà à une distance de plus de 80 fois le rayon du soleil. Cette première discussion implique que plus une étoile a un grand rayon plus la probabilité de trouver une exoplanète de faible demi-grand axe sera faible. En d'autres termes, pour le même demi-grand axe une petite étoile aura plus de chance d'avoir une exoplanète qu'une étoile géante. Cela montre que la probabilité de la valeur du demi-grand axe n'est pas indépendante de la taille de l'étoile hôte, elle est conditionnée.
A l'inverse, pour les étoiles de rayon plus grand que 5 rayons solaires, le demi-grand axe des étoiles semble être statistiquement constant : aux alentours de 2 U.A. Il est évident que ce résultat est faussé par le fait que l'échantillon des étoiles géantes est petit et qu'en plus les étoiles éloignées de plusieurs U.A. sont difficiles à détecter. Cependant, supposons pour la pédagogie, ce résultat vrai. Cela implique que quelque soit la taille d'une étoile hôte entre 5 et 10 rayons solaires, son exoplanète a un demi-grand axe de près de 2 U.A. Dans ce cas, la condition sur la taille de l'étoile hôte n'a aucune influence sur la probabilité du demi-grand axe de l'exoplanète. En statistique, on dira que le demi-grand axe d'une exoplanète est indépendant du rayon de son étoile hôte lorsque ce dernier est entre 5 et 10 rayons solaires.
Signal sur Bruit
En astronomie, lorsqu'une image ou un spectre d'un objet du ciel est obtenu, le résultat varie d'une acquisition à l'autres même si la méthode utilisée est identique: même instrument, même temps de pose, etc. Cela est dû au fait que les photons collectés dans les pixels n'arrivent pas tous de manière uniforme. Si les photons d'une étoile arrivaient à une allure constante de 1 photon par milliseconde sur un pixel, alors un temps de pose de 1 seconde fournirait toujours 1000 photons. Cependant, les photons n'arrivent pas de manière ordonnée, ils suivent une loi dite de Poisson (décrite en détails dans la seconde partie du cours). Cela est dû au fait que les atomes des étoiles créant ces photons agissent de manière chaotique. Par conséquent, si on compte le nombre de photons collectés durant un temps d'une seconde sur 1000 images, on se retrouve avec un échantillon de 1000 valeurs. Il est possible de calculer la moyenne de cet échantillon que l'on note , qui est le signal recherché. L'écart-type, qui est une estimation de son erreur absolue, vaudra alors ; ceci est une propriété de la loi de Poisson. Par exemple, si N vaut 10, son erreur absolue vaut . Le rapport entre le signal, 10, et l'erreur appelé bruit, 3,16, vaut alors
donc 3,16 dans ce cas particulier. Ce rapport s'appelle le rapport Signal sur Bruit, S/B. Dans le cas où le signal N vaut 100 alors le bruit vaut 10 et le signal sur bruit 10. On voit par cet exemple que plus le S/B est grand moins la mesure est entâchée d'erreurs, et vice versa. En astronomie, pour qu'une mesure ait un sens, un S/B d'au moins trois est requis.
Courbe transit
Courbe de transit
Deux courbes de transit normalisées montrant le passage d'une exoplanète devant son étoile hôte.
Crédit :
ESO
La figure ci-contre illustre, dans le cas plus particulier de la détection des exoplanètes par transit, l'influence du bruit pour détecter une exoplanète. Le graphique supérieur montre un transit assez évident avec une chute puis une remontée de la luminosité . La courbe noire est l'ajustement théorique du flux. Cela représente la courbe sans le bruit, sans la dispersion statistique. Plus réalistes, les points montrent les observations qui sont composées du signal et du bruit. Les courbes sont ici normalisées à 1. Pour le graphique du bas, la décroissance est visible mais plus difficile à modéliser correctement car elle est moins forte. Les deux courbes montrent la présence d'une planète avec des rapports S/B proche de 20. En effet pour un signal de 1 le bruit est de l'ordre de 0,05. Cependant si ce S/B est suffisant pour détecter les deux exoplanètes, il donnera une meilleure précision sur les propriétés (masse, rayon, ...) de l'exoplanète du graphique du haut car le profil de luminosité est plus profond que pour l'exoplanète du graphique du bas.
Probabilités
Auteur: Sylvain Fouquet
Probabilités
Statistique et probabilité sont deux côtés d'une même pièce. Ces deux domaines des mathématiques s'occupent de décrire le résultat d'expériences ou d'observations faisant intervenir le hasard. Par exemple, tirer un bulletin dans une urne, choisir des personnes au hasard dans un groupe, sélectionner des étoiles au hasard dans le ciel, etc, ne peuvent pas se décrire par la mécanique classique, l'hydrodynamique ou encore le magnétisme mais par la statistique et les probabilités. Pourquoi avoir deux noms ? Statistique et probabilité ne sont pas identiques dans la démarche bien que traitant des mêmes sujets. La statistique sert à observer et décrire le monde alors que les probabilités, aussi appelés théorie de la probabilité, tentent de l'expliquer théoriquement, mathématiquement. Ces deux approches se complètent mutuellement comme l'observation physique et le modèle mathématique se complètent.
L'expérience de 100 lancers du même dé servira à illustrer la différence entre statistique et probabilité. Lors de cette expérience, la statistique décrit les propriétés statistiques de ces 100 lancers. Par exemple, la statistique montre que chaque face du dé est presque apparue autant de fois. La valeur moyenne se rapproche de 3,5. De manière complémentaire à cet aspect observationnel, la théorie de la probabilité prouve que si vous avez un dé non pipé, il y a autant de chance de tomber sur une face que sur une autre. Pour un nombre de 100 lancers, la théorie de la probabilité indique quelle est la chance d'obtenir la face 1 par exemple. Les prévisions de la théorie de la probabilité doivent se confirmer dans les résultats observationels de la statistique. Si tel n'est pas le cas pour les lancers de dé, cela veut dire que le dé est pipé et qu'il faut changer les lois de probabilité (passer de la loi "chaque valeur a une chance sur 6 de sortir" à une loi plus compliquée qui va définir le dé pipé), à l'instar d'une expérience mettant en échec une théorie physique.
Les variables aléatoires
L'univers des événements
En probabilité, les variables sont dites aléatoires car pour, une même expérience, la mesure de la même observable sera différente, aléatoire. Par exemple lorsqu'un dé est lancé, l'observable qui est le numéro du dé est aléatoire (à moins qu'il ne soit envoyé par une machine pouvant envoyer le dé à chaque fois exactement de la même façon). Ce qui importe pour une variable aléatoire c'est l'ensemble des valeurs qu'elle peut prendre. Pour un dé, il y a six faces ; le nombre d'événements possibles est six (on suppose que le dé ne peut pas s'arrêter sur une arête). Autre exemple, la variable donnant l'instant du prochain accident de voiture en France peut prendre n'importe quelle valeur à priori entre 0 seconde et l'infini : 1 secondes, 10 minutes, 1 heures, etc. Il y a une infinité de possibilités.
Il existe donc deux types de variables aléatoires : les variables discrètes (lancer de dés) et les variables continues (temps entre deux accidents). Pour les variables discrètes, le nombre d'evénements peut être fini ou infini. Il est toujours infini pour une variable continue. L'ensemble des évènements est appelé l'ensemble univers des évènements. La suite donne quelques exemples détaillés de ces types d'ensembles. En probabilité, les événements sont très souvent associés à des nombres pour pouvoir être traités mathématiquement. Par exemple pour un jeu de cartes, la carte roi de pique peut être associée à la valeur numérique de 25.
Exemples de variables discrètes
L'ensemble univers le plus connu et le plus simple de tous est l'ensemble des évènements d'un jet d'une pièce de monnaie. Il n'y a que deux évènements : {pile ; face} (trois évènements si l'on prend en compte le cas où la pièce reste sur son bord). Par commodité, on utilise l'ensemble {0, 1} en liant pile à 0 et face à 1.
L'autre variable aléatoire très connue est le lancer de dé avec ses six évènements possibles qui sont déjà des nombres : {1, 2, 3, 4, 5, 6}. Il est aussi possible de lancer deux dés à la fois et de sommer leurs résultats. Dans ce cas, cela conduit à un ensemble de 11 évènements {2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12}.
Des urnes remplies de boules de différentes couleurs sont aussi un exemple très pédagogiques d'ensemble univers. Par exemple, pour une urne remplie de 5 boules qui ne se différencient que par leurs couleurs : 2 noires, 2 blanches et 1 rouge, l'ensemble des évènements si l'on tire une boule est {noire, blanche, rouge}. Si l'on en tire deux, c'est alors {(noire, noire), (noire, blanche), (noire, rouge), (blanche, rouge)}. Encore une fois, il faut associer chaque couleur à un nombre pour pouvoir travailler dessus.
Enfin, pour les joueurs d'argent, et les aficionados de probabilités à variables discrètes, le casino est l'endroit rêvé. Il est possible de trouver là une multitude de jeux avec des ensembles univers allant de la case rouge ou noir à des images sur une machine à sous. Les casinos utilisent bien évidemment aussi les jeux de cartes pour enrichir le nombre d'évènement possibles.
Bref, les variables aléatoires discrètes sont partout dans la société. C'est d'ailleurs souvent à la suite de créations de la société : pièces, dés, cartes, roulette, loto, ...
Exemples de variables continues
Les variables continues se trouvent plus souvent liées à des propriétés physiques de la nature. Un exemple simple peut se trouver dans les prévisions météorologiques : "Quand pleuvra-t-il chez moi ?". La réponse se trouve être entre tout de suite (0 seconde) et jamais (un temps infini). Il y a donc une infinité continue de durées possibles. Il peut se passer plusieurs jours sans pleuvoir alors que parfois moins d'une heure s'écoule entre deux averses. Cet exemple de variable aléatoire est similaire à celui de l'intervalle de temps entre deux accidents de voitures. Plus généralement, il se trouve que certains phénomènes naturels n'arrivent pas de manière régulière. On peut alors introduire la variable aléatoire qui donne le temps entre deux occurences.
Un autre type de variables aléatoires continues sont les incertitudes dues à de faibles changements des conditions initiales. Refaire exactement la même chose un grand nombre de fois donne un résultat similaire mais pas identique. Lancer un poids est un de ces cas. Vous aurez beau faire attention, vous ne lancerez jamais avec exactement la même force, dans la même position et dans les mêmes conditions (vent, atterissage, etc). La conséquence est que le poids ne tombera jamais au même endroit. Il en est de même pour la production de pièces en série qui ne sont jamais tout à fait identiques. Tous ces cas peuvent se traiter avec les variables aléatoires continues.
La fonction de probabilité
En probabilité, après avoir défini l'ensemble univers des évènements, il reste à associer à chaque évènement sa probabilité de se produire via la fonction de probabilité. Cette fonction prend des valeurs entre 0 et 1. La valeur 0 signifie que l'évènement est impossible, la valeur 1 qu'il est certain.
Par exemple, dans le cas d'un jet d'une pièce non faussée, l'ensemble des évènements est {pile, face}, ou {0, 1}, et la fonction de probabilité, notée , donne et . Cela signifie qu'il y a la même chance de tomber sur pile que sur face. Par contre si la pièce était faussée, il serait possible d'avoir une fonction de probabilité donnant : et . "pile" aurait alors 4 fois plus de chance de sortir.
Cette loi nous amène à une propriété bien naturelle des probabilités.
La probabilité de l'ensemble univers vaut 1 : P(Univers) = 1.
En effet, il est certain que la variable aléatoire sorte un évènement de l'ensemble univers. Dans le cas d'un lancer de dé, P({1, 2, 3, 4, 5, 6}) = 1, car on est sûr d'obtenir comme résultat 1, 2, 3, 4, 5 ou 6. A l'inverse, l'ensemble vide {} a toujours une probabilité nulle : P({}) = 0.
Probabilité sur des sous-ensembles d'événements
Dans le cas, d'un dé non pipé, la fonction de probabilité est pour tous de 1 à 6, . Il y a en effet autant de chance de tirer un 1, un 2, etc. Cependant quelle est la probabilité de tirer un nombre pair, {2, 4, 6} ? Intuitivement, cette probabilité doit être plus grande que de tirer seulement un 2. Le bon sens et la construction de la théorie des probabilités impliquent qu'elle corresponde à la somme de chacune de leur probabilité. Donc . Il en est de même pour la probabilité de tirer un nombre impair. Ce petit exemple illustre une loi simple de probabilité. La détermination de la probabilité d'un sous-ensemble est égale à la somme de la probabilité de chacun des événements du sous-ensemble.
Voyons comment calculer la probabilité de l'union de deux sous-ensembles. Par exemple au jeu de 52 cartes, la probabilité de tirer n'importe quelle carte est la même et vaut 1/52. Dans ce cas, la probabilité de tirer une carte rouge vaudra 1/52 26 = 1/2 car il y a 26 cartes rouges, la moitié du nombre des cartes. La probabilité de tirer une carte noire vaut aussi 1/2, quant à celle de tirer un coeur, elle vaut 1/4 et celle de tirer un roi 1/13. Quelle est alors la probabilité de tirer une carte rouge ou noire ? ou la probabilité de tirer une carte rouge ou de coeur ? ou encore une carte rouge ou un roi ? Pour la première probabilité, intuitivement le résultat est 1 car c'est l'ensemble univers. Cela revient à la somme des probabilités des sous-ensembles : 1/2+1/2. Pour la seconde, la probabilité reste celle de tirer une carte rouge, 1/2, car obligatoirement un coeur est une carte rouge. On n'additionne donc pas les probabilités. Le dernier cas est plus compliqué car deux rois font partie de l'ensemble des cartes rouges mais les deux autres non. Comment faire ? La relation donnant la solution générale est
où A et B sont deux sous-ensembles de l'ensemble univers, l'union de deux ensembles et leur intersection. Vous pouvez vérifier que cela donne bien les résultats des deux premiers exemples. Dans le cas des rois, la probabilité est alors P(rouge rois) = P(rouge) + P(rois) - P(rois rouge). Il se trouve que l'ensemble {rois rouge} n'est formé que des deux rois rouges, donc sa probabilité est 2 1/52 = 1/26. Le résultat est donc P(rois rouge) = 1/2 + 1/13 - 1/26 = 1/2 + 1/26 = 14/26.
Notons que si {A B} = {}, donc si A et B sont disjoints, il suffit alors de sommer la probabilité de A et de B pour avoir celle de AB car P({}) = 0.
Calcul de la fonction de probabilité
Équipartition
Dans le cas d'un ensemble fini, il est parfois très facile de calculer la fonction de probabilité. Il suffit que tous les événements soient équiprobables, c'est à dire qu'ils aient la même probabilité, notée . Cela est vrai pour un jet de dé ou de pièce non faussés, ou pour un jeu de cartes bien mélangé. Dans ce cas, la probabilité de tous les évènements, donc de l'ensemble univers, vaut P({E1, E2, E3, ..., En}) = P({E1}) + P({E2})+ P({E3})+ ... + P({En}) = p +p +p +...+p = car tous les ensembles d'évènements sont disjoints, c'est à dire pour tous et , {} = {}. Or la probabilité de l'ensemble univers vaut par définition 1. Donc ce qui implique que . Cela justifie pourquoi la probabilité pour le lancer d'une pièce vaut 1/2, pour le jet d'un dé vaut 1/6 et pour le tirage d'une carte dans un jeu de 52 cartes vaut 1/52.
Loi des grands nombres
Lorsqu'il n'y a pas équipartition dans les probabilités, il est moins direct de déduire la loi de probabilité. Une façon simple en théorie mais hélas irréalisable en pratique est la loi des grands nombres. Pour connaître la loi de probabilité, il suffit de mesurer plusieurs fois la valeur d'une variable aléatoire, de compter combien de fois sortent les mêmes valeurs puis de diviser ces nombres par le nombre total d'essais. Ainsi pour connaître la loi d'un dé, il suffit de faire une grand nombre de lancers, 1000 par exemple, et de regarder combien de 1 de 2 de 3, ... et de 6 sont sortis et enfin de diviser ces nombres d'occurences par le nombre total de lancers, 1000 dans ce cas. Cela fournit une valeur proche de la probabilité de chaque évènement mais pas exacte. La théorie mathématique prouve que si le nombre total d'essais est infini (ce qui est évidemment impossible en pratique), on en déduit alors la probabilité exacte pour chaque événement.
Pour des variables continues où les résultats sont des réels, deux résultats ne peuvent jamais être identiques car la chance d'avoir exactement deux réels identiques est nulle. Ce qui est mesuré est la probabilité d'avoir des valeurs dans un petit intervalle autour d'une valeur donnée. De toute façon, les outils de mesure n'étant pas parfaits, il est impossible de mesurer avec une précision infinie. La largeur des intervalles considérés dépendra donc de la précision des mesures.
Introduction aux théorème de Bayes - Découvrir la bonne urne
Considérons deux urnes, l'une remplie de 9 boules blanches et d'une seule boule noire, appelée A, et l'autre remplie de 9 boules noires et d'une boule blanche, appelée B. Il est interdit de voir leur contenu, on ne peut qu''en extraire une boule. Le problème est de savoir quelle est l'urne A parmi les deux urnes ? Sans faire aucun tirage de boule, la probabilité qu'une urne donnée soit l'urne A est la même pour les deux urnes et vaut donc 0,5, une chance sur deux, car il n'y a que deux événements.
Le problème ici n'est pas de connaître la probabilité de tirer des boules blanches ou noires dans les urnes A ou B mais de savoir depuis quelle urne sont tirées les boules en s'aidant du résultat du tirage d'une urne. Ce sont alors des probabilités conditionnelles : sachant qu'un résultat est vrai, quelle est la probabilité qu'un autre le soit aussi ? Ce problème simple d'urne peut s'extrapoler dans le cas de théories physiques. Imaginons que deux théories (deux urnes) soient en concurrence pour expliquer les mêmes phénomènes statistiques (tirage de boules). En faisant quelques observations (en tirant quelques boules), il est alors possible de montrer qu'une théorie est plus probable qu'une autre. Il est aussi possible que les deux théories se trompent (en tirant une boule rouge d'une des deux urnes).
De plus, avec les probabilités conditionnelles, il est possible d'estimer des grandeurs physiques via la mesure d'autres grandeurs. Un exemple caricatural éclaircira ce principe. Ayant les yeux bandés, je cherche à savoir si j'ai devant moi un norvégien ou un espagnol. Je peux estimer la taille de la personne mais pas voir son passeport. Comme j'ai une pensée très caricaturale, pour moi tous les norvégiens sont grands blonds aux yeux bleux et tous les espagnols sont petits bruns aux yeux marrons. Donc si j'ai devant moi une personne plutôt grande, je dirai que c'est un norvégien. De plus, s'il m'est permis de ne regarder que ses cheveux et qu'ils sont blonds, ma certitude grandit. La taille et la couleur des cheveux que j'ai pu observer servent à estimer avec une certaine probabilité la nationalité d'une personne. Cette méthode repose sur une loi conditionnelle implicite qui est qu'un homme grand aux yeux bleus à une plus forte probabilité d'être norvégien qu'espagnol. Cette démarche est beaucoup utilisée en astrophysique pour déterminer des propriétés inaccessibles par des mesures directes, mais déductibles par d'autres propriétés observables. Cependant, il est important de se souvenir que ce ne sont que des probabilités. D'autre part, cela suppose que les lois conditionnelles supposées a priori soient correctes.
Théorème de Bayes
Venons-en aux formules qui permettent concrètement de résoudre le problème de l'urne. Soient A et B deux expériences. La probabilité de A sachant B vrai, noté P(A|B), est donnée par la loi suivante, dite formule de Bayes établie par le mathématicien et pasteur Thomas Bayes au XVIIIe siècle :
Il suffit de connaître P(A), P(B) et P(B|A) pour en déduire P(A|B).
Ce théorème provient du fait que et que, de même, donc que .
Dans le cas particulier des urnes, si l'on tire une boule blanche quelle est alors la probabilité que ce soit de l'urne A, probabilité notée P(Urne A|Blanche), ou de l'urne B, P(Urne B|Blanche) ? Dans le cas de l'urne A, il faut calculer les trois probabilités P(Blanche|Urne A), P(Urne A) et P(Blanche). La probabilité de tirer une boule blanche dans l'urne A est P(Blanche|Urne A) = 9/10. La probabilité de choisir l'urne A ou B est identique au début de l'expérience et vaut P(Urne A) = P(Urne B) = 0,5. Enfin la probabilité de tirer une boule blanche est P(Urne A)P(Blanche|Urne A)+P(Urne B)P(Blanche|Urne B) = 0,59/10 + 0,51/10 = 0,5 car il est possible de tirer une boule blanche depuis l'urne A ou depuis l'urne B, mais pas avec la même probabilité. Ainsi, la probabilité que l'on soit en présence de l'urne A sachant que l'on a tiré une boule blanche est donnée par P(Urne A|Blanche) = P(Blanche|Urne A)P(Urne A)/P(Blanche) = 9/100,5/0,5 = 9/10. Dans l'autre cas P(Blanche|Urne B) = 1/10. Avec cette observation du tirage d'une boule blanche, on est passé d'une probabilité de 0,5 pour que l'urne étudiée soit l'urne A, à une probabilité de 9/10 pour que l'urne étudiée soit l'urne A.
Grandeurs classiques en probabilité
L'espérance
En théorie des probabilités, l'espérance est la valeur moyenne à laquelle on s'attend pour une variable aléatoire suivant une loi de probabilité donnée. Elle se définit dans le cas d'une variable discrète par la relation suivante : . De manière similaire, elle se définit pour une variable continue : où et sont les limites inférieures et supérieures que peut prendre la variable .
Un exemple dans la cas d'une variable discrète est la moyenne au lancer d'un dé. L'espérance est alors = 1×1/6+2×1/6+3×1/6+4×1/6+5×1/6+6×1/6 = 21/6 = 3,5. Dans le cas d'une variable continue comme la loi uniforme de 0 à 1 (), l'espérance est . Moyenne et espérance se ressemblent beaucoup, cependant elle ont une différence. L'espérance est une valeur dans le cadre de la théorie des probabilités associée à une loi de probabilité. La moyenne est, quant à elle, le résultat d'une opération arithmétique sur un échantillon. La moyenne dépend donc de l'échantillon alors que l'espérance est théorique et donc unique pour une loi donnée. La moyenne calculée à partir d'un échantillon doit être proche de l'espérance mais pas forcément identique. Par exemple, lorsqu'un dé est tiré 10 fois et que la moyenne des résultats est faite, le résultat n'est pas forcément l'espérance de 3,5. De plus, si l'on refait 10 lancers la nouvelle moyenne ne sera pas forcément identique à la première. Cependant, d'après la loi des grands nombres, plus le nombre de lancers de dé sera grand, plus la moyenne s'approchera de l'espérance. L'espérance doit être vue comme la limite de la moyenne lorsque l'on fait tendre le nombre d'essais vers l'infini.
Le moment d'ordre deux centré - la variance
La variance ou "moment d'ordre deux centré" est une mesure du carré de la dispersion d'une variable aléatoire autour de son espérance. En d'autres termes, la variance donne une information sur la dispersion de la variable aléatoire autour de l'espérance. Plus la variance est grande plus les valeurs de la variable aléatoire auront de chance d'être loin de l'espérance, et vice versa. Une variance faible donnera une loi de probabilité piquée autour de l'espérance. Pour une variable discrète, la variance se définit comme suit :
avec l'espérance. Dans le cas d'une variable continue, . On peut aussi définir la variance en n'utilisant que l'espérance de la variable et : . La démonstration est demandée en exercice. L'écart-type, souvent noté , est la racine carrée de la variance : . De même que pour le couple espérance-moyenne, le terme variance s'utilise plutôt en probabilité et écart-type en statistique.
Pour le lancer de dé non biaisé, la variance vaut environ 2,91667 et donc l'écart type vaut environ 1,70783. Pour la loi uniforme de 0 à 1, la variance vaut 1/12 ≈ 0,0833.
Fonctions de distribution
Fonctions de distribution
Fonctions de distribution (en haut) et lois de probabilité (en bas) du lancer d'un dé (à gauche) et de la loi uniforme sur [0, 1] (à droite).
Crédit :
Sylvain Fouquet
Avant de décrire plusieurs lois de probabilité utiles car très courantes, cette section décrit l'outil majeur qu'est la fonction de distribution et sa dérivée, la loi de probabilité.
Fonction de distribution
Pour une variable aléatoire notée , la fonction de distribution, notée , donne la probabilité d'avoir la variable strictement plus petite que : . La fonction est donc par définition une fonction croissante et bornée par la valeur 1. Cette définition convient aussi bien aux variables discrètes qu'aux variables continues. Il est aisé avec cette fonction de calculer la probabilité d'avoir la variable entre et . C'est tout simplement . En conséquence, si la courbe est plate ou avec une pente faible entre deux points et , cela conduit à une probabilité entre et faible alors que si la pente est forte la probabilité l'est aussi.
La figure en haut à gauche montre la fonction de distribution d'un dé. Pour , la fonction est nulle, il est en effet impossible qu'un jet de dé puisse sortir un nombre plus petit que 1. De à , est constante et vaut 1/6 qui est la probabilité d'avoir un 1 à un jet de dé. Ensuite entre 2 et 3 exclus, la fonction vaut ; cela correspond à la probabilité de sortir un 1 ou un 2. La fonction continue d'augmenter pour plafonner jusqu'à x>6 où elle atteint sa valeur maximale de 1 car il est certain qu'un dé sorte un chiffre plus petit ou égale à 6.
La figure en haut à droite montre la fonction de distribution d'une variable continue. En dessous de 0, sa valeur est nulle au dessus de 1 elle vaut 1. Les valeurs possibles de cette variable sont donc comprises entre 0 et 1 inclus. La pente est une droite ; pour n'importe quel intervalle entre 0 et 1 de même taille la probabilité est donc la même. En conséquence, la probabilité d'avoir une valeur entre [, ] est identique. Cette fonction de distribution n'est autre que la fonction de distribution de la loi uniforme entre 0 et 1 ; chaque nombre entre 0 et 1 ayant la même chance d'être tiré.
Loi de probabilité
La fonction de distribution est l'outil statistique par excellence en probabilité. Cependant, d'un point de vue pratique, on lui préfère sa dérivée qui est plus parlante : la loi de probabilité. En effet, c'est la pente de la fonction de distribution qui indique si une valeur a une forte probabilité ou pas de survenir. Cela revient en statistique à faire l'histogramme vu aussi dans la première partie de ce cours.
La figure en bas à gauche montre la dérivée de la fonction de distribution pour un lancer de dé. On retrouve le résultat classique qui veut que la probabilité de sortir un 1, 2, 3, 4, 5, ou 6 soit identique et égale à 1/6. La figure en bas à droite fait de même mais avec la loi uniforme entre 0 et 1. La fonction est une courbe plate montrant bien que chaque valeur a une même probabilité.
Par la suite et pour finir cette partie théorique, plusieurs lois de probabilité incontournables sont passées en revue. La liste est évidemment non exhaustive.
Loi binomiale
La loi binomiale
Exemples de lois binomiales pour différent nombre de répétition () d'une loi à deux évènements et pour différentes probabilités de l'évènement 0 (). Pour le même nombre de lancers , le pic est à 14 avec un probabilté et seulement 10 avec . Pour et , le pic est à 20, à la moitié du nombre de lancers, car il y autant de chance d'avoir l'évènement 0 que 1. En comparaison de et , lorsque , la fonction a un pic moins haut mais plus reséré, cela est dû au fait que le rapport entre l'espérance et l'écart type tend vers 0 lorsque tend vers l'infini.
Crédit :
Wikipédia
Lois à deux événements
Les lois n'ayant que deux évènements sont les plus simples mais aussi les plus utilisées. L'ensemble univers de ces lois de probabilités n'étant composé que de deux événements, il s'agit d'une variable discrète. Les événements peuvent être représentés par 0 et 1. Par exemple le jet d'une pièce suit ce type de lois : 0 étant par convention "pile" et 1 "face". L'évènement 0 a une probabilité notée alors que l'événement 1 a une probabilité notée . Toujours, dans le cas d'une pièce de monnaie, . De manière générale, et n'ont aucune raison d'être identiques comme dans le cas de la pièce de monnaie. Je peux inventer une expérience où je définis l'évènement 0 si un dé sort la valeur 1 et l'événement 1 si un dé sort 2, 3, 4, 5 ou 6. Dans ce cas et . De manière générale comme 0 et 1 forment l'ensemble univers, alors la probabilité donc et . Les lois à deux événements ne dépendent donc que d'un paramètre, .
Loi binomiale
En compléxifiant la loi vue ci-dessus, il est possible de créer la loi binomiale. Cette dernière s'intéresse aux résultats de plusieurs lancers d'une expérience n'ayant que deux événements possibles. Par exemple, lorsqu'une pièce est lancée 20 fois de suite, quelle est la probabilité d'avoir 10 faces ou 3 piles ou même 20 faces de suite ? La loi binomiale dépend donc de deux paramètres : la propabilité de la loi à deux événements et le nombre de répétition de cette loi, . Son ensemble univers est constitué de toutes les séries possibles de répétitions de la loi à deux évènements. Le nombre d'événements vaut donc car à chaque répétition ( en tout) il y a deux événements possibles. Par exemple, lancer une pièce trois fois donne évènements possibles. L'ensemble univers est en ce cas : (0, 0, 0), (0, 0, 1), (0, 1, 0), (0, 1, 1), (1, 0, 0), (1, 0, 1), (1, 1, 0), (1, 1, 1). Chaque évènement est donc constitué d'un certain nombre de 0, noté , et de 1, noté . Par définition la probabilité de 0 vaut et celle de 1 vaut . Donc la probabilité d'un évènement est . L'intérêt dans ce type d'expérience est de savoir combien de fois sort l'évènement 0 ou 1 mais sans se soucier de l'ordre. Les évènements (0, 1, 0) ou (1, 0, 0) sont alors considérés comme identiques. La loi binomiale fournit la probabilité de tirer évènements 0 sur lancers. Pour cela, il suffit de remarquer que pour un nombre d'événements 0 parmi lancers, il est possible d'effectuer permutations. Donc la probabilité recherchée, notée , vaut .
Propriétés de la loi binomiale
Sur lancers, plus un évènement aura une grande probabilité plus il sortira souvent. Cependant, il est rare qu'il sorte pour chaque lancer. En conséquence, le pic de probabilité de la loi binomiale se situe en , où est la partie entière. Si p tend vers 1 alors le pic tendra vers , à l'inverse il tendra vers 0. De plus, l'espérance de la loi binomiale vaut et son écart type vaut . Dans le cas ou est très grand, un million par exemple, Le rapport écart-type sur espérance vaut , il tend vers zéro. Si l'on voit l'espérance comme la mesure d'une observation et l'écart type comme son incertitude absolue alors, si est très grand, l'incertitude relative sur la mesure sera très faible. Par exemple, dans un métal constitué de milliards d'atomes, supposons que les spins de chaque atome puissent être en haut ou en bas avec la même probabilité, . Alors le métal n'aura pas de champ magnétique significatif car il aura statistiquement à chaque instant quasiment autant de spins en haut qu'en bas. La différence instantanée entre le nombre d'atomes ayant un spin en haut ou en bas, générateur d'un champ magnétique, sera en ordre de grandeur ; ce qui fournira des champs très faibles en comparaison du potentiel que pourraient produire les atomes du métal si tous les spins étaient alignés dans le même sens. De plus, ce champ magnétique est très instable dans le temps (on dit qu'il fluctue) et a une moyenne nulle au cours du temps.
La loi de Poisson
Loi de Poisson
Trois exemples de loi de probabilité derivé de la loi de Poisson pour trois valeurs de : 1, 4 et 10.
Crédit :
Wikipédia
Définition
La loi de Poisson, nommée d'après le mathématicien français Siméon Denis Poisson, s'applique à une variable discrète mais pouvant prendre des valeurs arbitrairement grandes. Son ensemble univers peut alors se confondre avec l'ensemble des entiers naturels. La loi de Poisson dépend d'un paramètre noté par usage . La loi de probabilité de la loi de Poisson est toujours positive (voir figure). Si vaut 0, comme et , alors . Lorsque tend vers l'infini, tend vers 0 du fait du terme en factorielle qui domine le terme . Cette loi de probabilité admet un unique pic, appelé aussi mode, avec la valeur de , si n'est pas un entier, et deux pics, et , si est un entier. L'espérance ainsi que la variance de cette fonction valent . L'écart type vaut donc .
Bruit de photons
Il a déjà été fait mention dans la première partie de ce cours sur les statistiques des exoplanètes, que les photons captés pendant un temps par un pixel de caméra CCD suivent une loi de Poisson. De ce fait, lorsque plusieurs poses du même objet astronomique sont faites, durant par exemple 10 minutes, le nombre de photons d'un pixel provenant de l'objet décrit une loi de Poisson dont la moyenne qui est la mesure physique est le paramètre de la loi.
La loi normale
Loi normale
Trois exemples de fonctions de probabilités de loi normale avec différents espérances et écart-types.
Crédit :
Wikipédia
Fonction de distribution de la loi normale
La fonction de distribution de la loi normale dont l'écart-type vaut 1 et l'espérance 0.
Crédit :
Wikipédia
Ecart-type de la loi normale
Figure du haut, boîte à moustaches représentant l'espace interquartile, les extrema théoriques étant à l'infini. Figure du milieu, la valeur exprimée en des différents quartiles. Figure du bas, la probabilité d'avoir un résultat entre [, ] (15,73 %), entre [, ] (68,27 %) et enfin entre [, ] (15,73 %).
Crédit :
Wikipédia
Définition
La dernière loi décrite est la plus connue si ce n'est la plus utilisée dans le domaine des statistiques. C'est le prolifique mathématicien allemand Carl Frierich Gauss qui la popularisa, elle porte son nom : la loi gaussienne aussi appelée loi normale. A l'inverse des deux précedentes lois, elle s'applique sur l'ensemble des réels. Pour un intervalle [, ], cette loi de probabilité vaut : . Elle a deux paramètres qui sont , l'espérance de la fonction de probabilité, et , l'écart type. Le terme devant l'exponentielle est un terme de normalisation afin que la probabilité totale de l'univers, donné par l'intégrale de cette loi depuis jusque , vale 1. Le mode, valeur pour laquelle la fonction connaît un pic, est égale à sa moyenne, . L'écart-type à l'espérance est donné par . A la probabilité chute d'une facteur ; à , ce facteur devient , soit un peu plus de 90. La chute est donc très rapide à mesure qu'on s'éloigne de la valeur moyenne. En d'autres termes, la probabilité de voir sortir un réel séparé de plus de de la moyenne devient très faible, et cette probabilité devient quasiment nulle à (voir la troisième figure).
Une loi pour les erreurs de mesures
Lorsqu'une expérience est effectuée plusieurs fois, un résultat un peu différent de celui attendu apparaît. La différence entre la vraie valeur et notre mesure est appelée l'erreur. Par exemple, dans le cas de la fabrication de pièces mécaniques dans l'industrie, aucune pièce n'est strictement identique à une autre. Il y a donc un écart (une erreur) à la valeur désirée par le fabricant. Les causes des erreurs peuvent être multiples mais si elles sont sans lien entre elles (on dit qu'elles sont indépendantes), alors la loi de probabilité suivie par les erreurs est une gaussienne. Deux qualificatifs caractérisent une expérience ou la machine fabriquant une pièce mécanique : la fiabilité et la précision. La fiabilité informe si vous êtes en accord avec l'espérance en calculant la différence entre la moyenne obtenue et la valeur réelle. La précision quantifie l'incertitude pour chaque expérience, elle est donnée par l'écart-type, . Si la moyenne diffère significativement de l'espérance ("signifcativement" voulant dire "par rapport à l'écart-type"), on parle de mesure biaisée.
Exercices
Auteur: Sylvain Fouquet
Exercices
Ce chapitre a pour but de revoir et de tester les connaissances sur la théorie des probabilités. Quelques questions de cours rappellent les concepts clés, puis, des questions proches du cours en sont une application directe pour tester la bonne compréhension du concept. Ensuite, des exercices, supposant que le cours est bien appris et compris, utilisent les probabilités pour résoudre des problèmes particuliers.
Variables aléatoires
Cours
Difficulté : ☆
Question 1)
Qu'est-ce qu'une variable aléatoire ?
La réponse est dans le cours.
Question 2)
Quels sont les deux types de variables aléatoires ?
La réponse se trouve dans le cours.
Exercice sur les variables aléatoires
Difficulté : ☆
Question 1)
Ayant deux dés distinguables, un bleu et un rouge, combien d'événements sont possibles en les lançant ? Notez bien que l'évènement "Face 1" pour le dé rouge et "Face 2" pour le dé bleu, noté (1,2), n'est pas le même événement que "Face 2" pour le dé rouge et "Face 1" pour le dé bleu, noté (2,1).
Pensez à bien énumérer toutes les combinaisons possibles, en se souvenant que l'univers pour l'ensemble des deux dés est donné par le produit cartésien des univers pour chacun des dés.
Question 2)
Même question avec deux dés rouges que l'on choisit de ne pas distinguer. En d'autres termes, les couples tels que (2, 1) et (1, 2) sont considérés comme un unique évènement.
Quels événements de la question précédente sont à présent confondus ? Sur quel critère ? Combien d'événements sont concernés ?
Question 3)
Supposons un générateur parfait de nombres aléatoires réels dans l'intervalle [0, 1[. Quels sont les évènements possibles et combien y en a-t-il ?
La variable aléatoire ainsi générée est-elle discrète ou continue ?
Question 4)
L'ordinateur n'est pas parfait et ne peut garder en mémoire que 4 chiffres après la virgule. Combien d'événements le générateur de la question 3) peut-il alors fournir ?
Pensez à énumérer tous les cas possibles, en gardant à l'esprit que l'ensemble des possibilités est donné par le produit cartésien des possibilités pour chaque décimale.
Ensemble
La théorie des probabilités se sert beaucoup de la théorie des ensembles. Ces exercices ont pour but de vous l'illustrer
Cours sur les ensembles
Question 1)
Définir l'union de deux ensembles A et B ? Quelle est alors la probabilité , le signe signifiant Union ?
Une représentation graphique des ensembles A et B (dans le cas général où leur intersection est non vide) pourra être utile.
Question 2)
Définir l'intersection de deux ensembles A et B. Que dire de par rapport à et pour des variables discrètes à valeurs dans un ensemble fini ? Donner un exemple où . Notez que le symbole signifie l'intersection.
Une représentation graphique des ensembles A et B (dans le cas général où leur intersection est non vide) pourra être utile.
Question 3)
Quelle est la probabilité P(A U B U C) en fonction de P(A), P(B) et P(C) ?
Là encore, une représentation graphique des ensembles A, B, C et de leurs intersections sera très utile.
Question 4)
Définir le complémentaire de l'ensemble A. Quelle est alors sa probabilité par rapport à ?
Une représentation graphique de l'univers des possibles, de son sous-ensemble A et de son complémentaire peut être utile.
Probabilités à variables discrètes et équipartition
Lancers de deux dés
Difficulté : ☆
Question 1)
Soit deux dés distincts que l'on lance, quels sont les différents événements et leurs probabilités ?
On pourra se reporter à l'exercice précédent.
Question 2)
On s'intéresse maintenant à la somme des deux dés. Quels sont les événements possibles et comment sont-ils liés aux événements de la question précédente ? De là, quelles sont leurs probabilités ?
Examiner les valeurs que prend la somme pour chaque événement décrit à la question précédente.
Question 3)
Commentez la nouvelle loi de probabilité calculée.
Reconnaît-on une loi du cours ? Donner les différentes caractéristiques observées sur cette loi (symétries éventuelles ?)
Question 4)
Vaut-il mieux tenter de faire un 6 avec un dé ou avec la somme de deux dés ?
Jeu de fléchettes
Difficulté : ☆☆
Question 1)
Soit un jeu de fléchettes avec une cible de rayon 10 cm. Quels événements considère-t-on en général dans ce jeu ? Sur quoi est basée la probabilité de ces derniers ?
Comment compte-t-on les points sur une cible de fléchettes ?
Question 2)
On suppose que la moitié des fléchettes n'atteint pas la cible et que la zone centrale donnant le plus de point a un rayon de 1 cm. Quelle est alors la probabilité de faire le maximum de points ?
Probabilités conditionnelles
Faux positifs
Difficulté : ☆☆
Lors du dépistage d'une maladie rare, touchant près d'une personne sur mille, les tests ne sont pas fiables à 100%. Après une campagne de dépistage, il y a alors des faux positifs, c'est-à-dire des personnes dépistées comme malades alors qu'elles sont saines. À l'inverse, il y a aussi des faux négatifs, c'est-à-dire des personnes dépistées comme saines mais en réalité malades. Le problème est alors de savoir quelle est la proportion de faux positifs parmi les détections.
On suppose qu'un patient malade est détecté par le dépistage avec une probabilité de 99%. À l'inverse, un patient sain est détecté comme tel avec une probabilité de 95%.
Question 1)
Quel est la malchance d'être diagnostiqué faux-positif, c'est à dire, quelle est la probabilité qu'une personne positive soit en fait non malade ?
Question 2)
Qu'en déduire sur le résultat d'un test positif ? Comment expliquer cela ?
Fonction de distribution
Cours
Difficulté : ☆
Question 1)
Pour la variable , Démontrer que pour une variable discrète. (La démonstration est similaire pour une variable continue en changeant le signe somme en intégrale). signifie l'espérance de et .
Écrire la définition mathématique de la variance, et y reconnaître les espérances pour des variables discrètes.
Question 2)
Définir la fonction de distribution d'une loi de probabilité.
Voir cours.
Question 3)
Quelle est la fonction de distribution de la loi de probabilité : pour x dans l'intervall [0, 1], et en dehors.
Utiliser la définition mathématique de la fonction de distribution par rapport à celle de la loi de probabilité correspondante.
Propriétés et applications de la loi binomiale
Loi binomiale
Difficulté : ☆
Question 1)
Définir la loi de probabilité binomiale ? Quelles sont ces propriétés : espérance et écart-type ?
Voir cours.
Question 2)
Pour des événements de 30 lancers d'une pièce de monnaie non biaisée, combien de combinaisons présentent 28 lancers "face" ? Combien présentent 13 lancers "pile" ?
Penser aux fonctions mathématiques de dénombrement vues en cours.
Question 3)
Si la probabilité d'avoir pile vaut , quelles sont alors les probabilités d'avoir 28 faces ou 13 piles ?
Utiliser la définition de la loi binomiale.
Propriétés et applications de la loi poissonnienne
Loi de Poisson
Difficulté : ☆
Question 1)
Définir la loi de probabilité de Poisson ? Quelles sont ses propriétés : espérance et écart-type ?
Voir cours.
Question 2)
Soit un champ de m², il tombe des gouttes de pluie en 10 secondes suivant une loi de Poisson de paramètre . Combien en moyenne, tombera-t-il de gouttes d'eau dans ce champ en 1 heure ?
Utiliser la réponse à la question précédente.
Propriétés et applications de la Gaussienne
Loi Normale
Difficulté : ☆
Question 1)
Définir la loi de probabilité normale ? Quelles sont ses propriétés : espérance et écart-type ?
Voir cours.
Question 2)
Pour une loi normale de moyenne nulle, quelles sont les probabilités d'avoir, un résultat en dehors de 1 ou 3 ( étant l'écart-type) ?
Utiliser les valeurs tabulées de la fonction de distribution associées à la loi normale se trouvant sur la figure du cours.
Question 3)
Supposons qu'un modèle physique prédise une mesure théorique de 20 mètres lors d'une expérience. L'expérimentateur fait l'expérience et trouve 19,5 mètres. Que dire sur le modèle physique selon que l'incertitude est de 0,5 m ou de 0,05 m ?
Réfléchir en termes d'interprétation statistique selon une loi normale, en supposant la mesure non biaisée (c'est-à-dire que la moyenne des valeurs mesurées tend vers la valeur théorique quand le nombre de mesures s'accroît).
Mini-projet
Auteur: Sylvain Fouquet
Mini-projet
Dans cette dernière partie du cours, un ensemble d'exercices fait une synthèse entre la statistique des exoplanètes et les lois de probabilité. Les cinq exercices utilisent les lois de probabilité pour réfléchir sur les exoplanètes. Il faut noter que les hypothèses faites dans les énoncés (distribution des planètes autour d'une étoile donnée, détectabilités des exoplanètes) sont des hypothèses ad hoc. Ces propriétés sont encore très mal connues.
Contrôle
Combien d'exoplanètes dans la Voie Lactée ?
La première question concerne le nombre d'exoplanètes dans les sytèmes planétaires de notre galaxie, la Voie Lactée, en comparaison des planètes du système solaire. Notez que jusqu'à ce jour, on ne détecte que les exoplanètes de la Voie Lactée. On ne sait rien des planètes des milliards d'autres galaxies connues.
Supposons que la Voie Lactée soit constituée de 100 milliards d'étoiles, ce qui est juste au première ordre. Supposons aussi que la probabilité de trouver des planètes autour d'une étoile soit la même pour chaque étoile. Ceci est sûrement faux mais simplifie les calculs. Enfin supposons que la loi de probabilité du nombre de planètes par étoile est une loi de Poisson ayant un paramètre égal à 5.
Question 1)
Combien en moyenne y a-t-il d'exoplanètes autour des étoiles ? Quelle est la probabilité de trouver un système planétaire avec un nombre égal à la moyenne ?
Question 2)
Quel est la probabilité de trouver un système planétaire tel que le système solaire, avec huit planètes ou avec au moins huit planètes ? Que conclure sur le système solaire dans ce cas ?
Question 3)
Considérant les données observationnelles, la plupart des exoplanètes sont seules autour de leur étoile. Dans ce cas, la loi des grands nombres tendrait à montrer que la moyenne des exoplanètes par étoiles serait proche de 1. Que devient la chance de trouver un système solaire dans un tel cas. Quelle est l'erreur de raisonnement fait ici ?
Question 4)
Combien statistiquement devrait-il y avoir d'exoplanètes dans la Voie Lactée ?
Les Jupiter Chauds
Cet exercice porte sur les Jupiter Chauds, des exoplanètes ayant une masse similaire à celle de Jupiter et très proches de leur étoile. Outre leur intérêt physique qui obligent à repenser la formation et l'évolution des planètes, ces planètes sont aussi intéressantes d'un point de vue statistique, car elles sont plus faciles à détecter et donc moins sujettes aux biais observationnels. Cet exercice montre que même avec une faible fraction de Jupiter Chauds dans la galaxie, cette population peut paraître la plus importante avec des moyens obervationnels limités.
Supposons toujours que les étoiles ont toute la même loi de probabilité d'avoir des planètes, un loi de Poisson avec une moyenne de 5. Supposons que la probabilité pour une planète d'être un Jupiter Chaud soit de 0,0001. Supposons que l'on soit sûr de pouvoir les découvrir à une distance de 2 kpc. On suppose aussi que la probabilité qu'une planète soit de type Terre est de 0,1 mais qu'il n'est possible de la trouver qu'à moins de 50 parsec.
Question 1)
Quelle loi de probabilité va servir pour déterminer le nombre de Jupiter Chauds ou de planètes de type Terre par la suite?
Question 2)
Combien de Jupiter Chauds et de planètes de type Terre y aurait-il dans la Voie Lactée ? Quel est leur rapport ?
Question 3)
En sélectionnant 100 000 étoiles brillantes dans le ciel, toutes à moins de 2 kpc, dont 27 sont à moins de 50 parsec, combien statistiquement y aura-t-il de Jupiter Chauds et de planètes de type Terre découverts? Quel est leur rapport ? Conclure.
Relation étoiles-exoplanètes
Cet exercice s'intéresse aux relations qui pourraient exister entre les exoplanètes et leur étoile hôte. La théorie bayésienne est alors utilisée. Dans un vision plus réaliste des exoplanètes que pour les exercices précédents, la probabilité de présence de planètes n'est pas la même pour les différents types d'étoiles.
Question 1)
Lors d'une observation non biaisée, c'est à dire complète, pour détecter des planètes géantes gazeuses sur 200 étoiles, 28 planètes géantes gazeuses sont découvertes autour de 75 étoiles de métallicité plus grande que 0 (étoiles riches en métaux) et seulement 2 pour les 125 étoiles de métallicité plus petite que 0 (étoiles pauvres en métaux). A chaque fois, les planètes gazeuses géantes sont trouvées seules sans autre géante gazeuse. Que dire qualitativement de l'influence de la métallicité sur la détection de planètes gazeuses?
Question 2)
Soit, G, l'ensemble des étoiles ayant la propriété suivante "avoir une seule planète gazeuse pour une étoile" et son contraire NG ainsi que l'ensemble M ="avoir une étoile riche en métaux" et son contraire NM. Avec les données de l'énoncé, quelles sont les probabilités de P(G), P(NG), P(M), P(NM) ?
Question 3)
Que signifient les probabilité suivantes P(G|M) et P(G|NM) ? Quelles sont leurs valeurs ? Les comparer à P(G) et commenter.
Question 4)
Pour une étoile choisie au hasard, une unique planète géante gazeuse est observée. Qu'elle est la probabilité pour l'étoile d'être une étoile riche en métaux, P(M|G) ? Commenter.
Question 5)
Comparer la probabilité que l'étoile avait d'être riche en métaux avant et après la découverte de la planète géante gazeuse. Quels sont les points forts et les points faibles de cette méthode pour connaître la métallicité d'une étoile ?
Détection d'une exoplanète par transit
Transit d'exoplanètes
Différentes configurations de transit d'exoplanète. La direction de la ligne de visée est indiquée à droite. De la gauche vers la droite: une orbite d'exoplanète ayant un angle nul avec la ligne de visée, il y a un transit assuré, ensuite une exoplanète dont l'orbite fait un angle de quelques degrés, noté alpha, avec la ligne de visée, enfin une exoplanète dont l'orbite est perpendiculaire à la ligne de visée, l'exoplanète n'est alors pas visible par transit.
Crédit :
Sylvain Fouquet
Lors d'un transit, une exoplanète passe devant son étoile depuis un observateur sur terre, la luminosité de l'étoile est alors diminuée durant un certain laps de temps avant de revenir à la normale. Cette mesure permet la détection d'une exoplanète. Lorsqu'une exoplanète est recherchée par la méthode des transits, les observateurs espèrent que cette l'orbite de l'exoplanète passe devant l'étoile hôte pour un observateur terrestre. Il y a un facteur chance pour détecter des transits d'une étoile donnée. Les campagnes de recherche observent un grand nombre d'étoiles et l'analyse des données nécessite de corriger le taux de détection de transits de la probabilité d'observer ces transits.
Question 1)
Supposons qu'une étoile ait un rayon de 1 million de km (par comparaison le Soleil fait près de 700 000 km de rayon), quel angle maximal, sur le plan d'une trajectoire circulaire d'une exoplanète à 1 U.A., faut-il pour voir un transit? Notons qu' une inclinaison de 0 degré signifie que la trajectoire est vue de côté, donc qu'il y a un transit, et qu'une inclinaison de 90 degrés signifie que la trajectoire est vue de face, donc sans transit.
Question 2)
Que dire sur l'influence du rayon de l'étoile et de la distance de l'exoplanète à cette étoile sur l'angle minimal requis pour détecter l'exoplanète ? Commenter le biais de cette méthode.
Question 3)
Que se passe-t-il qualitativement si l'orbite n'est plus circulaire mais elliptique ? Commenter sur un autre biais de la méthode des transits.
Question 4)
Dans le cas précédent (une exoplanète à 1 U.A. d'une étoile de rayon 1 millions de km), quelle est la probabilité de la détecter, sachant qu'aucun angle n'est a priori préféré pour son orbite circulaire ?
Question 5)
Que devient cette probabilité pour un Jupiter Chaud (distant de son étoile de 0.1 U.A) autour d'une étoile géante ayant un rayon de 10 millions de km ?
Conclusion
Au fil de ce cours plusieurs concepts clés sur la théorie des probabilités ont été étudiés. Premièrement, il y a eu l'idée de variables aléatoires qui signifie que pour la même expérience les résultats sont différents. Il peut y en avoir un nombre fini, comme pour le lancer d'un dé, ou infini comme pour le temps entre deux averses. Ensuite, l'idée qu'à chaque résultat ou évènement, il est possible d'associer une probabilité allant de 0, l'impossibilité, à 1, la certitude. Enfin, quatre lois de probabilités très utilisées ont été présentées : la loi d'équipartition lorsque tous les évènements ont la même probabilité, la loi binomiale, la loi de Poisson et la loi Normale.
Quant à la statistique, elle est en pratique utilisée pour découvrir ces lois de probabilités. Dans ce cours, le support a été l'étude des exoplanètes. L'étude d'un échantillon a montré des propriétés sur la masse, le rayon ainsi que le péricentre des exoplanètes.
Ce cours n'est évidemment qu'une introduction aux probabilités. Une étude plus approfondie permettra de mieux comprendre la définition mathématique rigoureuse des probabilités. De plus, avec le couple probabilité-statistique, il est possible de tester différentes lois de probabilité et de les confronter à des données statistiques pour en déduire si la loi à de fortes chances d'être correcte ou est sûrement fausse. Cela se fait par l'utilisation de tests statistiques, tels que le test Kolmogorov-Smirnov. Les probabilités servent aussi à ajuster des courbes ou des modèles. Cela se fait avec le test dit du "chi2" pour . Ce ne sont ici que des exemples très connus mais le couple probabilité-statistique est bien plus riche et peut servir dans bons nombres de domaines scientifiques et même économiques.
-------------FIN DU CHAPITRE -------------FIN DU CHAPITRE -------------FIN DU CHAPITRE -------------FIN DU CHAPITRE -------------
Solution : réponse 3)
(
C'est une orbite basse ou "Low Earth Orbit"
)
Question 2 Aide :
Les satellites sont habituellement classés en fonction de leur masse.
Solution : réponse 2)
(
Cette catégorie concerne les satellites de 1 kg à 10 kg. Jusqu'à 6U un CubeSat doit peser moins de 10 kg.
)
Question 3 Aide :
La construction intervient tardivement dans les phases de réalisation d'un projet spatial.
Solution : réponse 5)
(
La construction et les tests ont lieu lors de cette phase.
)
Question 4 Aide :
Tous ces avantages découlent de la standardisation des interfaces.
Solution : réponse 1)
(
De nombreux sous-système "sur étagère" existant, il n'est plus nécessaire de développer entièrement son satellite.
)
Solution : réponse 3)
(
Il a permis le développement de déployeurs standardisés qualifiés pour bon nombre de lanceurs.
)
Question 5 Aide :
Le segment spatial se constitue de la plateforme et de la charge utile.
Solution : réponse 1)
(
Elle sert à échanger des données avec le sol.
)
Solution : réponse 2)
(
Vous devez avoir une idée assez précise de son utilité après ce cours.
)
Solution : réponse 4)
(
Elle assure, notamment, l'intégrité du satellite.
)
Question 6 Aide :
Cette absoprtion par l'atmosphère est l'une des raisons d'être des premiers observatoires spatiaux.
Solution : réponse 1)
(
Heureusement pour nous !
)
Solution : réponse 3)
Question 7 Solution : réponse 3)
Question 8 Solution : réponse 1)
(
L'importance croissance des CubeSats commerciaux symbolise l'adoption de ce standard et encourage les nouveaux investisseurs.
)
Question 9 Aide :
Le contrôle d'attitude concerne l'orientation du satellite dans l'espace.
Solution : réponse 2)
Question 10 Solution : réponse 3)
(
C'est le système de guidage, navigation et contrôle.
)
pages_qcm/objetobserves.html
QCM
'Paramètres'
Question 1 Solution : réponse 2)
(
Plus une planète est loin de son étoile, plus la distance angulaire entre ces deux corps a des chances d'être suffisamment grande et donc plus facilement la planète sera détectable. En revanche, plus elle est éloignée, moins elle est chauffée et éclairée par son étoile, ce qui rend la planète moins lumineuse et donc moins facilement détectable. Enfin une planète formée par effondrement gravitationnel se forme en effet loin de son étoile, mais l'incidence sur sa détectabilité par rapport à une formation classique par accrétion, surtout si le système est ancien, n'est pas probante.
)
Question 2 Solution : réponse 2)
(
Plus l'étoile est proche de nous plus la distance angulaire entre la planète et l'étoile sera grande donc plus facilement elles seront séparables.
)
pages_qcm/objetobserves.html
QCM
'Cibles'
Question 1 Solution : réponse 1)
(
Une naine M est une étoile de faible luminosité, température et masse (voir diagramme HR). Si elle est jeune alors les planètes qui tournent autour le sont aussi, et sont donc chaudes et lumineuses. Ceci diminue le contraste entre le système planétaire et son étoile, simplifiant la détection par imagerie directe. Mais les naines peuvent aussi être active (avoir de nombreuses éruptions stellaires) ce qui peut compliquer la tache de détection !
)
Question 2 Solution : réponse 1)
(
Les étoiles les plus lumineuses, les plus massives, sont aussi celle qui évoluent le plus rapidement. Si un étoile de type A se trouve sur la séquence principale, elle est nécessairement jeune, ce qui en fait une cible pour trouver des planètes jeunes donc très lumineuses. En revanche, une planète dont l'atmosphère est chauffée par ce type d'étoile devra quand même être relativement proche, ce qui complique la détection. Statistiquement les étoiles de type A ne sont pas nombreuses (moins de 1% des cas), on trouve surtout dans l'environnement du Soleil des étoiles de même type et surtout des étoiles plus légères encore.
)
pages_qcm/atmosphere.html
QCM
'Atmosphère'
Question 1 Solution : réponse 1)
(
L'atmosphère est quasiment transparente dans le domaine de longueur d'onde visible, heureusement sinon nous ne pourrions jamais rien voir quoi que ce soit ! Dans le proche infrarouge la situation est très différente : la vapeur d'eau y est très absorbante et ne laisse que des domaines de transparence très réduits pour étudier les planètes depuis le sol.
)
Question 2 Solution : réponse 2)
(
Dans l'atmosphère on trouve, même par temps clair des formations nuageuses optiquement fines, stratifiées, qui se déplacent dans des directions et avec des vitesses différentes suivant l'altitude ou des turbulences qui vont modifier de façon aléatoire et rapide le chemin optique parcouru par la lumière en provenance des objets que nous étudions. Ces modifications de chemin optique vont conduire à une déformation de l'image des objets à l'arrivée, ce qui va étaler les images obtenues.
)
pages_qcm/instrumentsqcm.html
QCM
'Séparer'
Question 1 Solution : réponse 1)
(
La coronographie permet de retirer une partie de la lumière provenant de l'étoile, on place le masque sur l'image de l'étoile de façon à atténuer son centre et l'on collimate la lumière en sortie pour retirer les résidus diffractés. La taille du masque ne nécessite pas d'adaptation, en revanche celui-ci doit être conçu suffisamment petit pour ne pas arrêter la lumière des planètes !
)
Question 2 Solution : réponse 3)
(
L'ADI fixe le télescope sur l'étoile cible, mais utilise le fait que l'on ne compense pas la rotation de la voûte céleste autour de l'axe de rotation terrestre pour laisser l'image de la planète tourner autour de cet axe. Le mouvement de la planète pendant une nuit d'observation, typiquement, dans le cas de l'imagerie directe, à plusieurs unités astronomiques de son étoile, n'est pas observable.
)
Question 3 Solution : réponse 2)
(
L'imagerie différentielle spectrale profite de la différence entre les spectres de l'étoile (chaude donc avec peu de molécules et donc peu d'absorption) et des planètes (plus froides donc comportant des molécules qui ont tendance à absorber une grande partie du rayonnement). On cherche à utiliser au moins une bande spectrale où l'on voit la planète et l'étoile et une où l'on ne voit que l'étoile car le spectre de la planète est à cet endroit dominé par une ou plusieurs molécules (dont les bandes d'absorption sont assez larges).
)
pages_qcm/instrumentsqcm.html
QCM
'Corriger'
Question 1 Solution : réponse 3)
(
Une tavelure n'est pas l'image d'un objet physique, c'est un artefact provoqué par des défauts sur le chemin optique (atmosphère et instrument).
)
Question 2 Solution : réponse 1)
(
Les systèmes d'optique adaptative forme une boucle composé d'un miroir et d'un analyseur de front d'onde, l'idée est de modifier la forme du miroir pour obtenir un front d'onde non perturbé.
)
pages_gcm-se-tester/gcm-qcm1.html
QCM
Question 1 Solution : réponse 1)
(
Bien que correct, on préfère employer le terme de Climat à celui de Circulation car il reflète mieux l'usage d'un GCM pour une exoplanète. De plus, l'usage préfère le mot Global à Général.
)
Solution : réponse 2)
Solution : réponse 3)
(
Bien que correct, on préfère employer le terme de Climat à celui de Circulation car il reflète mieux l'usage d'un GCM pour une exoplanète.
)
pages_gcm-se-tester/gcm-qcm1.html
QCM
Question 1 Solution : réponse 2)
Question 2 Solution : réponse 1)
pages_gcm-se-tester/gcm-questions-qcm2.html
QCM
'Question de cours'
Question 1 Solution : réponse 3)
Question 2 Solution : réponse 3)
(
C'est vraiment la limite basse, qui est plutôt employée pour la Terre, dans des applications de prédiction météorologique.
)
Solution : réponse 4)
Exercice
'Couples perturbateurs agissant sur un CubeSat'
Question 1
Question 2 Aide :
C'est un CubeSat 3U et on sait qu'une unité représente un cube de 10 cm d'arête et de 1,3 kg.
Question 3 Aide :
Comme première approximation, on peut considérer que le satellite est homogène et que son centre de masse se trouve parfaitement localisé en son centre. Les moments d'inertie principaux peuvent donc s'exprimer :
Question 4 Aide :
Ils sont au nombre de 4.
Question 5 Aide :
Pour la trainée atmosphérique :
Déterminer l'aire projetée le long de la direction du mouvement.
Exprimer la force de trainée atmosphérique :
Utiliser la position du centre de masse pour calculer les couples de trainée atmosphérique selon les trois axes principaux du satellite :
Aide :
Pour le gradient de gravité :
L'axe +Y étant parallèle à la vitesse du satellite et la trajectoire étant circulaire, le rayon vecteur de la force de gravitation se décompose dans le plan X-Z .
La matrice d'inertie s'exprime :
Appliquer la formule vue dans le cours :
En exprimant le produit vectoriel, on se rend compte que le maximum correspond à .
Aide :
Pour la pression solaire :
Consider l'un des pires cas, c'est à dire que les faces +X ou +Y sont parfaitement orientées vers le Soleil, et en déduire la surface exposée et l'angle d'incidence.
Exprimer la force de pression de radiation solaire : avec et .
Utiliser la position du centre de masse pour exprimer les couples de pression de radiation solaire selon les trois axes principaux du satellite :
Aide :
Pour le gradient magnétique :
Identifier le pire alignement entre le satellite et le champ magnétique terrestre : lorsque le dipôle résiduel et le champ magnétique sont perpendiculaires.
Le couple correspondant est simplement le produit de ces deux valeurs :
Question 6
Question 7 Aide :
Les magnéto-coupleurs doivent pouvoir compenser tous les couples perturbateurs agissant sur le satellite. Ils doivent donc au moins fournir N.m.
Aide :
Rappelons les équations permettant de calculer le couple magnétique et le moment dipolaire :
et , où N est le nombre de spire de la bobine.
pages_nanosats/exercice-propulsion.html
Exercice
Question 1 Aide :
Cette relation s'obtient facilement à partir de la relation exprimant la force en fonction de la vitesse d'expulsion et la définition de l'impulsion spécifique.
Question 2 Aide :
Le CubeSat faisant 3 unités, on peut estimer que sa masse totale est de 4 kg.
Question 3 Aide :
Il faut sommer la masse de carburant et la masse sèche afin d'obtenir la masse du système de propulsion dans son ensemble. Ceci n'est qu'une première approximation, notamment car on ne prend pas en compte la masse supplémentaire correspondant à des réservoirs plus gros.
Question 4
Question 5 Aide :
Dans ce cas, la durée de la manœuvre est directement liée à la force de poussée.
pages_nanosats/exercice-lois-de-commande.html
Exercice
'Étude d'un ressort'
Question 1
Question 2
Question 3 Aide :
Il faut prendre la transformée de Laplace de l'équation exprimée précédemment.
Aide :
Les conditions initiale sont supposées nulles.
Question 4
Question 5 Aide :
C'est une simple multiplication.
pages_dir-imagerie/astronomie.html
Exercice
'Astronomie'
Question 1 Aide :
Donner un angle, en seconde d'arc, correspondant au rapport trigonométrique entre la taille de l'orbite et la distance nous séparant de l'objet.
Solution :
Une seconde d'arc représente le soixantième d'une minute d'arc qui représente le soixantième d'un degré qui représente 1/360 d'une cercle. Nous effectuons ici un rapport de longueur et obtenons donc des radians il faut donc calculer . Ceci nous donne 0,0035 arcsec pour 51 Peg b soit une séparation de l'ordre de la milliarcseconde.
Question 2 Aide :
Donner un angle, en seconde d'arc, correspondant au rapport trigonométrique entre la taille de l'orbite et la distance nous séparant de l'objet.
Solution :
Une seconde d'arc représente le soixantième d'une minute d'arc qui représente le soixantième d'un degré qui représente 1/360 d'une cercle. Nous effectuons ici un rapport de longueur et obtenons donc des radians il faut donc calculer . Ceci nous donne 0.00023 arcsec pour Corot 7 b soit une séparation de l'ordre de la dizaine de microarcsecondes.
Question 3 Aide :
Donner un angle, en seconde d'arc, correspondant au rapport trigonométrique entre la taille de l'orbite et la distance nous séparant de l'objet.
Solution :
Une seconde d'arc représente le soixantième d'une minute d'arc qui représente le soixantième d'un degré qui représente 1/360 d'une cercle. Nous effectuons ici un rapport de longueur et obtenons donc des radians il faut donc calculer . Ceci nous donne 1.8 arcsec pour 2M1207 b soit une séparation de l'ordre de l'arcseconde.
Question 4 Aide :
Comparer la séparation angulaire des trois objets.
Solution :
51 Peg b est environ 1000 fois moins séparée de son étoile que ne l'est 2M1207 b et Corot 7 b en est 100 000 fois moins séparée. Les différentes techniques d'étude des exoplanètes sont complémentaires : chacune étudie un domaine de planète assez précis et différent, même si certaines planètes peuvent être étudiées par plusieurs techniques. Les planètes 51 Peg b et Corot 7 b sont beaucoup trop proches de leur étoile pour pouvoir être observées en imagerie directe, où l'on a besoin d'une séparation typique supérieure à 0,1 arcsec.
pages_dir-imagerie/detectabilite.html
Exercice
'Détectabilité'
Question 1
Question 2 Aide :
Considérez les planètes comme des corps noirs dans leur domaine d'émission thermique.
pages_dir-imagerie/probleme-questions.html
Exercice
'Distances'
Question 1 Solution :
Le demi-grand axe de l'orbite terrestre est égal à la circonférence de l'orbite (soit 30 km/s multiplié par un an) divisé par 2 , ce qui nous donne une distance d'environ 150 millions de kilomètres (c'est l'unité astronomique par définition). En utilisant la troisième loi de Kepler, l'on sait que pour un système donné, la période au carré sur le demi-grand axe au cube est une constante pour un système planétaire donné, on trouve ainsi un demi-grand axe de 780 millions de kilomètres pour Jupiter soit 5,2 unités astronomiques.
α Cen B a une parallaxe de 796.92 milliarseconde, ce qui nous donne une distance de 1,25 pc.
En appliquant l'équation trigonométrique approchée , on trouve une séparation apparente de 1,6" pour la Terre et de 8,3" pour Jupiter.
pages_dir-imagerie/probleme-questions.html
Exercice
'Technique'
Question 1 Aide :
Reprendre le graphique de Sara Seager et al. pour étudier le contraste en J, H et L .
Question 2
pages_ind-vr/exercice1.html
Exercice
'Astrométrie'
Question 1 Aide :
1 µas =
Si est en radian , le jongleur doit se trouver à m = 19 UA, soit environ la distance Terre-Uranus.
pages_ind-vr/exercice5.html
Exercice
'Bonnes et mauvaises configurations d'observation'
Question 1 Aide :
Selon comment le système est tourné par rapport à l'observateur, la projection dans la ligne de visée ou sur le plan perpendiculaire peut être
On pourra se référer à la définition des angles sur "Changement de référentiel"
pages_ind-vr/exercice5.html
Exercice
'Qu'est-ce que les vitesses radiales permettent de mesurer ?'
Attention le flux lumineux dépend de la longueur d'onde
pages_ind-transits/taille.html
Exercice
'Transit de planètes du système solaire'
Question 1 Aide :
Le Soleil a un rayon de et Jupiter a un rayon de . La Terre a un rayon de .
pages_ind-transits/candidates.html
Exercice
'Détectabilité des planètes par transit'
Question 1 Aide :
Le Soleil a un rayon de . L'orbite de la Terre a un rayon de soit 1 U.A. (Unité Astronomique). L'orbite de Jupiter est à 5.2 U.A.
pages_ind-transits/setester.html
Exercice
'HD 189733'
Question 1 Solution :
- Phase 0 : la planète passe devant l'étoile
- Phase 0.5 : la planète passe derrière l'étoile
- Entre la phase 0.2 et la phase 0.4, l'augmentation de surface de la planète orientée vers l'observateur
- Phase 0.2 : Nouvelle Planète (comme on parle de Nouvelle Lune)
- Phase 0.4 : Pleine Planète (comme on parle de la Pleine Lune).
Le flux = 1 correspond au flux de l'étoile.
Question 2 Aide :
Commencez par , puis .
Solution :
La période est 2.219 jours, la demi-amplitude est de 205 m/s, la vitesse du système est de -2.361 km/s.
pages_ind-transits/wasp89-donnees.html
Exercice
Question 1
Question 2 Aide :
La conversion d'un Flux F à une magnitude m est telle que
pages_ind-transits/wasp80-recherche.html
Exercice
'La recherche des transits'
Question 1
Question 2 Aide :
Il faut utiliser la méthode BLS décrite précédemment. Soit vous la codez vous-même, soit vous utilisez une fonction pré-existente qui intègre déjà cet algorithme BLS. Il y a de telles fonctions en python ou fortran par exemple.
Solution :
Pour gagner du temps nous utiliserons la fonction python bls.eebls qui permet de faire tourner l'algorithme BLS en une ligne de code (il faut suivre l'installation du module ici ). On peut aussi essayer de réinventer la roue et de le développer soi-même pour comprendre tous les tenants et aboutissants de cette fonction.
Faisons appel à la fonction BLS python pour trouver notre transit.
On appellera la fonction bls.eebls où l'on doit fournir les arguments qui suivent en entrée:
bls.eebls(bjd, flux, u, v, nf, fmin, df, nb, qmi, qma)
bjd est la date. Flux est le flux ou la magnitude. Puis les autres arguments sont fixés comme ceci :
u=np.empty(bjd.shape)
v=np.empty(bjd.shape)
nf=1000#nombre de bins de fréquences à tester
fmin=1./(100.)#fréquence minimum à tester (100 jours)
df=0.0005#taille des bins de fréquences
nb=1000#nombre de bins à utiliser pour la courbe de lumière sommée
qmi=0.001#durée de transit minimum à tester
qma=0.2#durée de transit maximum à tester
On appelle ensuite la fonction avec u et v qui sont vides et servent à des calculs intermédiaires et on stocke le résultat dans la variable results :
On constate donc qu'il y a une fréquence orbitale privilégiée à environ 0.33 orbite par jour, i.e. 1/0.326=3.067 jours par orbite. L'algorithme retourne une période (best_period) de 3.0674846 jours et une profondeur de transit (depth) de 0.0313459 pour cette meilleure période.
Question 3
pages_ind-transits/wasp80-planete.html
Exercice
'WASP-80 : Les paramètres de la planète'
Question 1 Aide :
Nous allons estimer le rayon de l'étoile à partir de sa température et de sa distance. La température est estimée à partir de ses magnitudes dans la couleur bleue (B) et visible (V) grâce au graphe ci-joint.
Aide :
Les données de l'étoile, sa distance et ses magnitudes B et V sont données dans le tableau venant de l'article de Triaud et al. ( ci-joint). Ces données sont aussi accessibles dans la base de données Simbad
Aide :
Notez que Simbad donne la parallaxe de l'étoile en milliarcseconde d'arc. La distance exprimée en parsec est l'inverse de la parallaxe exprimée en seconde d'arc.
Aide :
On utilise le fait que la luminosité d'une étoile est , que , où est la magnitude absolue de l'étoile (i.e. la magnitude qu'aurait cette étoile si elle était à 10pc) et enfin que la magnitude absolue et la magnitude visuelle, sont liées à la distance par
Aide :
La magnitude absolue du Soleil est de 4.83 et sa température est de 5800K.
Aide :
Dans ces calculs, on utilise différentes magnitudes dont les définitions sont données ici. La magnitude visuelle est notée ou .
Solution :
La différence de magnitude en bande B et en bande V égale à B-V=0.93. On trouve une température d'environ 4000K. On a affaire à une étoile de type K, plus petite que notre soleil (de type G2).
La distance est .
et donc où l'index est pour le Soleil et pour l'étoile WASP-80. D'après la définition de la magnitude, on a aussi que , où est la magnitude absolue de l'étoile. Pour transformer la magnitude mesurée (qui dépend de la distance de l'étoile) en magnitude absolue, on utilise , soit et donc on obtient , soit .
Question 2 Aide :
On utilise Tpla= 3.0674846 jours et la masse de l'étoile est dans Triaud et al. (2013), soit 0.57Ms.
On aurait aussi pu deriver la masse en utilisant les relations entre masse et rayon ou entre masse et luminosité.
Question 3 Solution :
Comme on a vu dans le cours, la durée du transit est égale à : en supposant un paramètre d'impact nul. On obtient donc une durée de 0.075 jours ou 1.8 heures, ce qui est proche de ce que l'on voit sur le transit zoomé de la page précédente.
Considérer que le forçage au niveau de la température de surface s'écrit sous la forme avec et deux températures constantes et une pulsation...
Aide :
...puis en déduire que le champ de température dans le sous-sol prend la forme avec et des termes dépendant de , et
Solution :
On considère un forçage en surface correpondant à une pulsation , de la forme .
La solution s'écrit .
Par identification, on a donc .
En appliquant l'équation de diffusion de la chaleur, on obtient la relation .
D'où les deux solutions et
La solution avec n'est pas physique, car elle donne une augmentation exponentielle du champ lorsque .
La solution finale s'écrit avec une fréquence spatiale , une épaisseur de peau , et
On se fixe comme critère que la profondeur minimale du sous-sol doit être telle qu'on représente le champ de température pour toutes les ondes :
A priori, la période la plus élevée est la période annuelle (les cycles pluriannuels, plus subtiles, ne font pas partie de cette étude) : vaut 150 jours.
L'application numérique donne une profondeur minimale de 6,7 mètres.
Question 2 Aide :
Analyser le champ de température pour deux pulsations différentes
Solution :
L'épaisseur de peau stipule que plus une onde a une période temporelle élevée, plus elle atteindra le sous-sol en profondeur. La période montre que plus une onde a une période temporelle élevée, moins sa période spatiale (suivant la profondeur) sera élevée. Ainsi, une discrétisation astucieuse requiert de rapprocher les niveaux proches de la surface, tandis que plus on ira en profondeur, plus les niveaux seront espacés.
pages_circulation-globale/gcm-exercices.html
Exercice
Question 1
Question 2 Aide :
Calculer la vitesse de l'onde la plus rapide ...
Aide :
... puis appliquer la condition CFL.
pages_circulation-globale/analyse.html
Exercice
Question 1 Aide :
C'est aussi simple que ça.
Question 2
Question 3 Aide :
Combien de simulations ?
Combien de variables par simulation ?
Combien de valeurs par variables ?
Combien d'octets pas valeur ?
Question 4 Aide :
C'est une question de temps et de mémoire.
pages_stat-exercice/variable.html
Exercice
'Cours'
Question 1 Aide :
La réponse est dans le cours.
Solution :
Une variable aléatoire est une variable dont la réalisation (valeur numérique par exemple) change à chaque mesure de façon aléatoire.
Question 2 Aide :
La réponse se trouve dans le cours.
Solution :
Ce sont les variables aléatoires discrètes (l'ensemble des valeurs possibles de la variable est dénombrable) et les variables aléatoires continues (pour lesquelles l'ensemble des valeurs possibles n'est pas dénombrable).
pages_stat-exercice/variable.html
Exercice
'Exercice sur les variables aléatoires'
Question 1 Aide :
Pensez à bien énumérer toutes les combinaisons possibles, en se souvenant que l'univers pour l'ensemble des deux dés est donné par le produit cartésien des univers pour chacun des dés.
Solution :
Il y a 6 possibilités d'évènements pour le dé rouge : {1, 2, 3, 4, 5, 6}. Pour chacun de ces évènements, il y en a six autres pour le dé bleu. Donc le nombre total d'évènements est . Une façon plus détaillée de le comprendre est de dire qu'un évènement est le couple des résultats du dé rouge et du dé bleu (Rouge, Bleu). Les couples sont donc (1, 1), (1, 2), (1, 3), (1, 4), ... On retrouve qu'il y a 6 possibilités pour le premier membre du couple et 6 pour l'autre, cela donne 36 possibilités.
Question 2 Aide :
Quels événements de la question précédente sont à présent confondus ? Sur quel critère ? Combien d'événements sont concernés ?
Solution :
Dans ce cas, une méthode lente mais sûre est de lister tous les couples possibles en commençant par tous ceux qui ont le nombre 1 pour le premier dé, puis ceux qui reste avec le 2, ensuite le 3 et ainsi de suite : (1, 1), (1, 2), (1, 3), (1, 4), (1, 5), (1, 6), (2, 2), (2, 3), (2, 4), (2, 5), (2, 6), (3, 3), (3, 4), (3, 5), (3, 6), (4, 4), (4, 5), (4, 6), (5, 5), (5, 6), (6, 6). Il est facile de remarquer qu'il y a six couples avec le nombre 1 puis 5 avec le 2 sans réintroduire les couples déjà vus avec le chiffre 1, puis 4, 3, 2, et enfin 1 couple possible avec le chiffre 6 qui est (6,6). Le nombre total de couples est 6+5+4+3+2+1 = 21.
Une autre façon plus rapide de calculer le nombre d'évènements est de repartir du résultat de la question précédente. Sur les 36 couples, seuls les couples avec deux nombres différents peuvent être confondus lorsque les dés sont de la même couleur, par exemple (2, 1) avec (1, 2). Cependant les couples (1, 1), (2, 2), ...(6, 6) ne peuvent pas être confondus avec d'autres. Donc sur les 36 évènements, 30 sont confondables. Chacun de ces 30 cas ne peut être confondu qu'avec un autre couple. (3, 1) n'est confondable qu'avec (1, 3). Sur les 30 évènements, il y en a donc deux fois trop. En résumé, il reste les 6 évènements non confondables et les 15 confondables, on retrouve bien les 21 évènements.
Question 3 Aide :
La variable aléatoire ainsi générée est-elle discrète ou continue ?
Solution :
Les évènements possibles sont tous les nombres réels allant de 0 inclus à 1 non inclus. Il y en a donc une infinité non dénombrable.
Question 4 Aide :
Pensez à énumérer tous les cas possibles, en gardant à l'esprit que l'ensemble des possibilités est donné par le produit cartésien des possibilités pour chaque décimale.
Solution :
Pour chacune des quatre décimales, le générateur peut fournir 10 chiffres allant de 0 à 9, donc il y a donc évènements. Le premier est 0,0000 puis 0,0001 etc. et le dernier est 0,9999.
pages_stat-exercice/ensemble.html
Exercice
'Cours sur les ensembles'
Question 1 Aide :
Une représentation graphique des ensembles A et B (dans le cas général où leur intersection est non vide) pourra être utile.
Solution :
L'ensemble C, défini comme l'union de A et B () se définit comme l'ensemble contenant les éléments se trouvant dans A ou dans B. On a alors où le symbole désigne l'intersection.
Question 2 Aide :
Une représentation graphique des ensembles A et B (dans le cas général où leur intersection est non vide) pourra être utile.
Solution :
L'ensemble se définit comme l'ensemble contenant les éléments se trouvant dans A etdans B. L'ensemble étant par conséquent inlcus dans A et B, sa probabilité sera inférieure ou égale à la probabilité de chacun de ces deux ensembles : . Dans un jeu de 52 cartes, si A est l'ensemble des cartes rouges et B l'ensemble des cartes noires alors est l'ensemble vide, d'où .
Question 3 Aide :
Là encore, une représentation graphique des ensembles A, B, C et de leurs intersections sera très utile.
Solution :
Or
Donc
Question 4 Aide :
Une représentation graphique de l'univers des possibles, de son sous-ensemble A et de son complémentaire peut être utile.
Solution :
L'ensemble C, complémentaire de A se définit comme l'ensemble contenant tous les éléments qui ne se trouvent pas dans A. Par exemple, si l'ensemble A se définit par les coeurs dans un jeu de cartes, l'ensemble opposé de A, noté , se définit comme tout ce qui n'est pas coeur : pique, trèfle et carreau. Il est parfois plus simple de définir un ensemble par ce qu'il n'est pas plutôt que par ce qu'il est. De là, le principe du tiers exclu donne , l'univers des possibles. Or . Comme cette dernière intersection est vide, on a .
pages_stat-exercice/proba-discrete.html
Exercice
'Lancers de deux dés'
Question 1 Aide :
On pourra se reporter à l'exercice précédent.
Solution :
Cette question est déjà vue à la question sur les variables aléatoires. Il y a 36 possibilités qui se définissent par un couple de deux nombres (a, b) où a et b peuvent prendre toutes les valeurs de 1 à 6. Si les dés ne sont pas faussés, chaque événement aura la même probabilité donc
Question 2 Aide :
Examiner les valeurs que prend la somme pour chaque événement décrit à la question précédente.
Solution :
Les événements possibles de sommes sont les nombres de 2 à 12. La preuve en est la liste exhaustive :
Cette liste donne les combinaisons pour toutes les sommes de deux dés. En utilisant la loi , il est alors possible de calculer la probabilité pour chaque valeur possible de la somme (de 2 à 12). Comme les évènements sont par nature disjoints l'un de l'autre, est toujours nulle. De ce fait, pour avoir la probabilité, il suffit de prendre le nombre total de combinaisons donnant la même valeur pour la somme, et de diviser ce nombre par 36.
Question 3 Aide :
Reconnaît-on une loi du cours ? Donner les différentes caractéristiques observées sur cette loi (symétries éventuelles ?)
Solution :
Cette loi, de forme "triangulaire", n'est pas équiprobable : la probabilité d'avoir une somme valant 3 n'est pas la même que d'avoir une somme valant 9. Cette loi présente un maximum pour la valeur 7 qui est la valeur la plus probable. Cette loi est symétrique par rapport à 7 car pour tout entier compris entre 2 et 12, .
Question 4 Solution :
La probabilité de faire un 6 avec un dé vaut , et celle de faire une somme valant 6 avec deux dés est , comme vu à la question précédente. Donc il vaut mieux prendre un seul dé pour espèrer faire un 6.
pages_stat-exercice/proba-discrete.html
Exercice
'Jeu de fléchettes'
Question 1 Aide :
Comment compte-t-on les points sur une cible de fléchettes ?
Solution :
Dans le jeu de fléchettes, les événements sont l'ensemble des positions que peut atteindre la fléchette. Il y a l'extérieur de la cible qui vaut généralement 0 point et des zones à l'intérieur de la cible. Chaque zone de la cible a une surface bien définie. C'est l'étendue de cette surface qui détermine la probabilité de la toucher. Pour un joueur sans aucun talent pour viser, la probabilité de toucher une zone est proportionnelle à sa surface.
Question 2 Solution :
La probabilité de toucher la cible est 1 moins "la probabilité de ne pas toucher la cible", car ces deux ensembles sont complémentaires. Donc la probabilité de toucher la cible vaut 0,5. En outre, la surface du centre vaut cm2 et celle de la cible tout entière vaut cm2. Or, la probabilité est proportionnelle à la surface, donc la probabilité de toucher la zone centrale, sachant que l'on a touché la cible, est P(toucher la cible) P(toucher la zone centrale | toucher la cible) .
pages_stat-exercice/bayes.html
Exercice
'Faux positifs'
Question 1 Solution :
La probabilité P(non malade | positif) = P(positif | non malade) P(non malade) / P(positif). La probabilité d'être non malade est P(non malade) = 0,999 d'après l'énoncé. La probabilité d'être positif mais en étant non malade est P(positif | non malade) = 5% = 0,05, toujours d'après l'énoncé. Il reste le plus difficile, la probabilité d'être dépisté positif, qui est la somme entre les cas (disjoints) "malades" et "non malades" : P(positif) = P(positif | malade) P(malade) + P(positif | non malade) P(non malade) = 0,990,001 + 0,050,999 = 0,00099 + 0,04995 = 0,05094. En définitif, la probabilité d'être faux-positif est P(non malade | positif) = 0,05 0,999 / 0,05094 0,98. Donc 98% des patients étant déclarés malades sont en réalité sains.
Question 2 Solution :
Ce résultat, qui paraît absurde car le dépistage est censément très fiable, est dû au fait que le nombre de personnes saines est bien plus grand que celui des personnes malades. Donc, même si l'erreur est faible, cela touche un bien plus grand nombre de gens et donc révèle plus de faux malades que de vrais. Sur 1000 personnes, il ne devrait y avoir en moyenne qu'une personne malade car P(malade) = 0,1% de 1000, soit 1. Cependant en moyenne, le test en montre 50 de plus car P(positif|non malade) = 5% de 1000, soit 50.
pages_stat-exercice/fdd.html
Exercice
'Cours'
Question 1 Aide :
Écrire la définition mathématique de la variance, et y reconnaître les espérances pour des variables discrètes.
Solution :
La variance est pour une variable discrète : = = .
Or , alors .
Ce qui montre que variance = .
Question 2 Aide :
Voir cours.
Solution :
Une loi de probabilité est la dérivée de la fonction de distribution d'une variable aléatoire : . Cette fonction de distribution décrit la répartition de la variable aléatoire selon l'égalité
Question 3 Aide :
Utiliser la définition mathématique de la fonction de distribution par rapport à celle de la loi de probabilité correspondante.
Solution :
Comme la loi de probabilité est nulle en dehors de [0, 1], alors la fonction de distribtution vaut donc 0 pour et 1 pour .
La fonction de distribution est l'intégrale de la loi de probabilité. Donc elle vaut où est la constante de normalisation pour que .
pages_stat-exercice/prop-binomiale.html
Exercice
'Loi binomiale'
Question 1 Aide :
Voir cours.
Solution :
Pour une loi binomiale de paramètre , on a et l'écart-type de vaut
Question 2 Aide :
Penser aux fonctions mathématiques de dénombrement vues en cours.
Solution :
Il y a combinaisons pour avoir 28 faces. Il y a pour avoir 13 piles.
Question 3 Aide :
Utiliser la définition de la loi binomiale.
Solution :
En reprenant le résultat de la question précédente et le cours, on trouve (face) = 0,8, (nombre de "face" = 28) = et (nombre de "pile" = 13) =
pages_stat-exercice/prop-poissonnienne.html
Exercice
'Loi de Poisson'
Question 1 Aide :
Voir cours.
Solution :
Pour une loi de Poisson de paramètre , , et
Question 2 Aide :
Utiliser la réponse à la question précédente.
Solution :
En 10 secondes, il tombe en moyenne gouttes. Comme en une heure, il y a 360 fois 10 secondes, donc en 1 heure, il tombe en moyenne 446482,8 gouttes.
pages_stat-exercice/prop-gaussienne.html
Exercice
'Loi Normale'
Question 1 Aide :
Voir cours.
Solution :
Pour une loi normale d'espérance et d'écart-type , on a
Question 2 Aide :
Utiliser les valeurs tabulées de la fonction de distribution associées à la loi normale se trouvant sur la figure du cours.
Solution :
La probabilité d'avoir un résultat en dehors de est donnée avec la loi de distribution : .
En regardant le cours, on calcule que la probabilité est d'environ 0,3173 en dehors de et d'environ 0,0027 en dehors de .
Question 3 Aide :
Réfléchir en termes d'interprétation statistique selon une loi normale, en supposant la mesure non biaisée (c'est-à-dire que la moyenne des valeurs mesurées tend vers la valeur théorique quand le nombre de mesures s'accroît).
Solution :
Lors d'une expérience, la mesure est toujours entachée d'une erreur du fait qu'il est impossible de refaire exactement la même mesure. Une mesure suit généralement une loi normale où l'espérance est la mesure attendue et l'écart-type est l'incertitude. Dans notre cas, l'espérance est de 20 mètres. Si l'écart-type attendu par l'expérimentateur est de 0,5 m alors la valeur mesuré de 19,5 est à 1 de la valeure théorique. Cela est probable (31,73% de chance, voir question ci-dessus) ; la théorie ne semble pas fausse. Par contre si l'écart-type attendu est 0,05 alors la mesure est à 10 . A trois , la probabilité est déjà faible (0,0027) mais à 10 elle est infinitésimale. La théorie semble alors invalidée par l'expérience.
 Prérequis
Prérequis Livres conseillés
Livres conseillés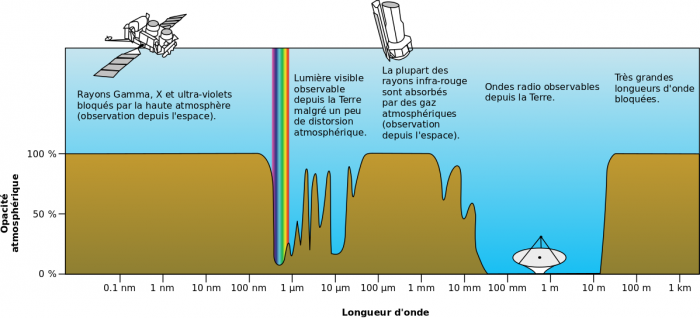

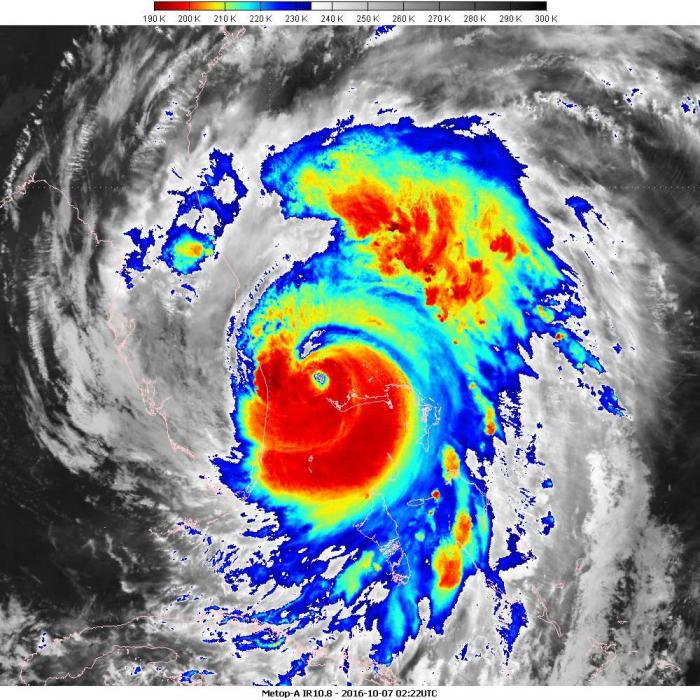
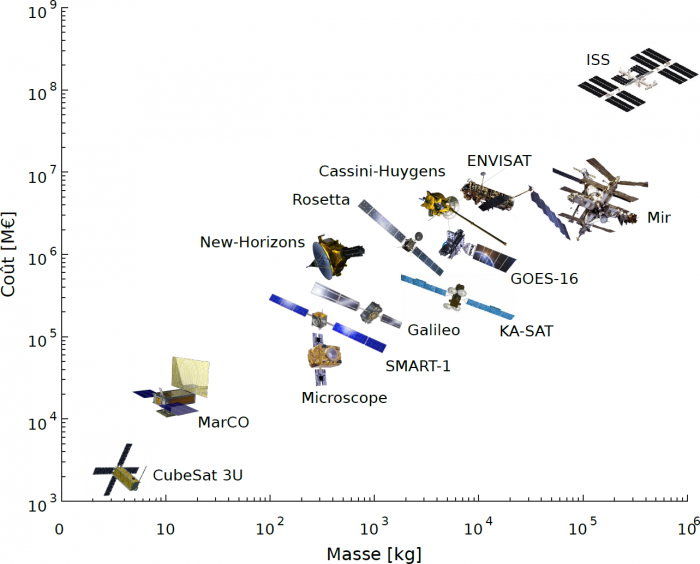





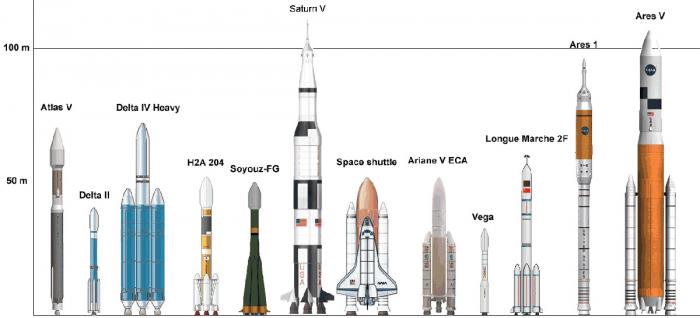
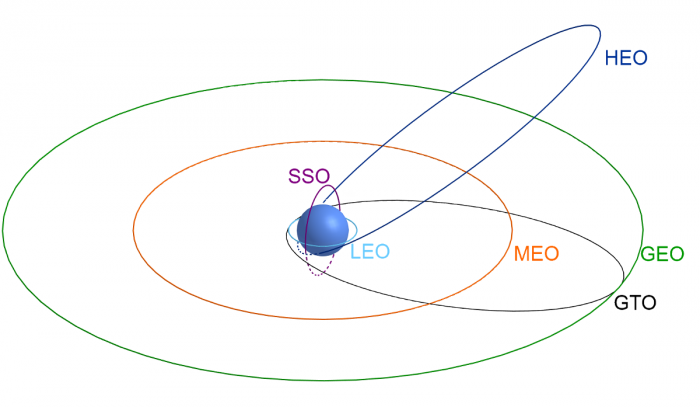

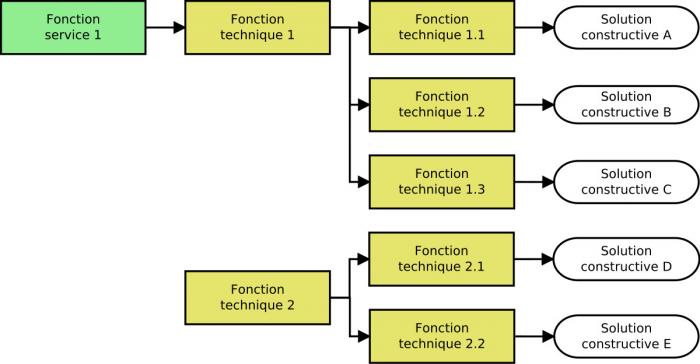
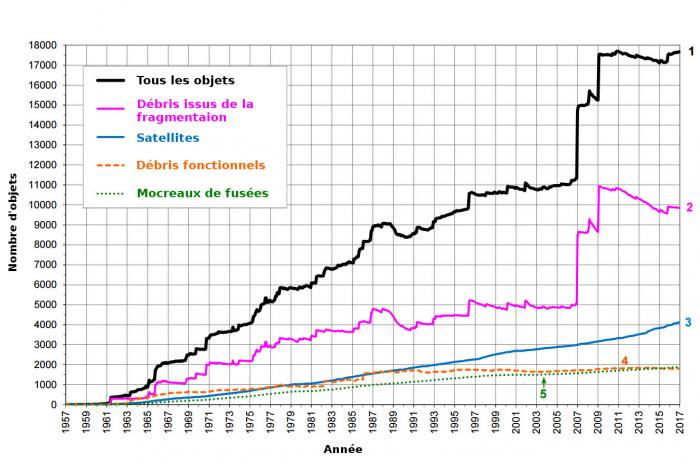
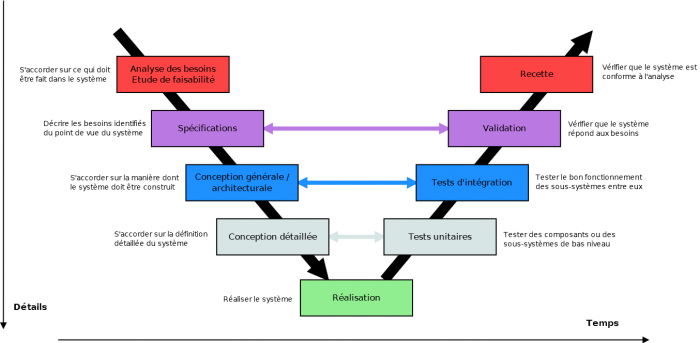
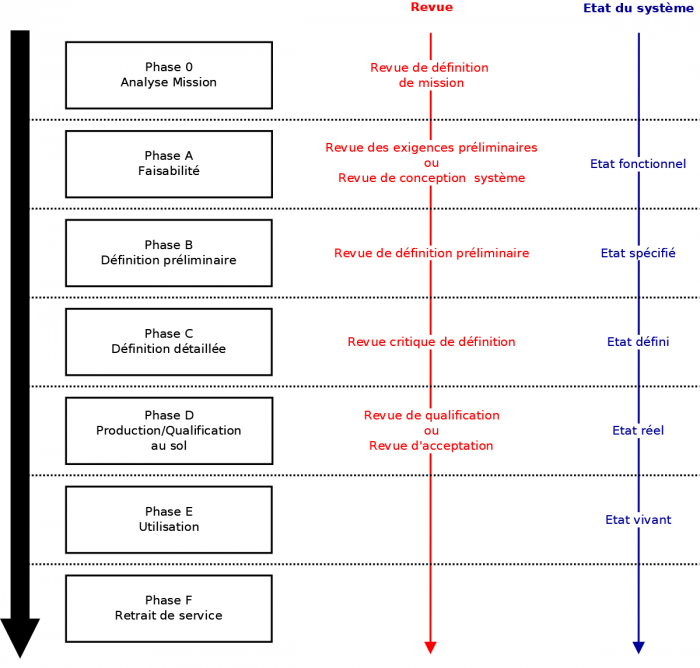
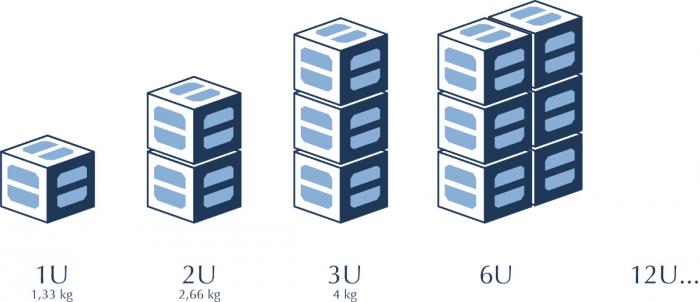
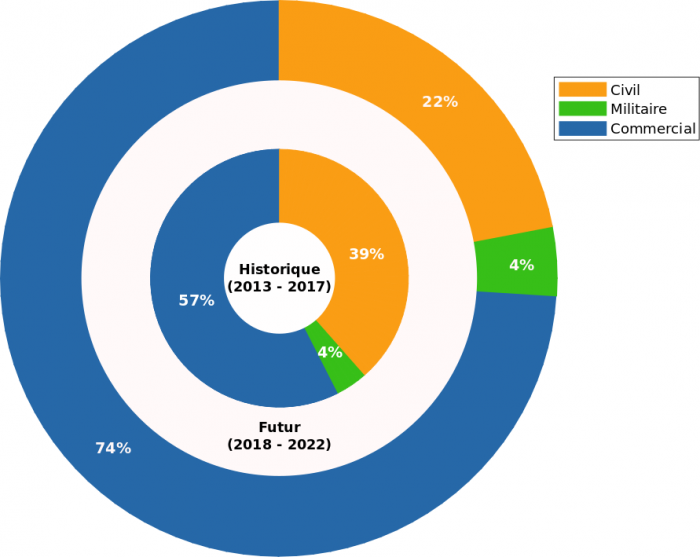

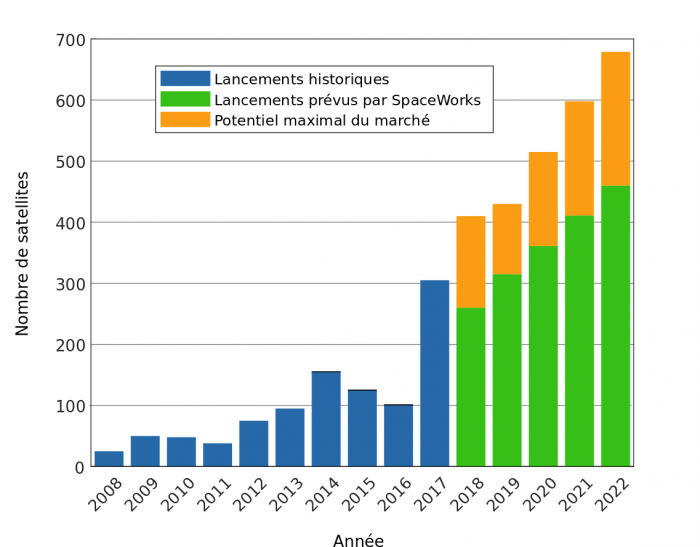
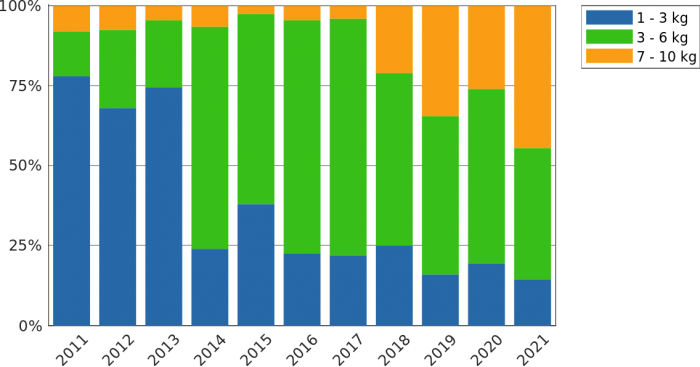
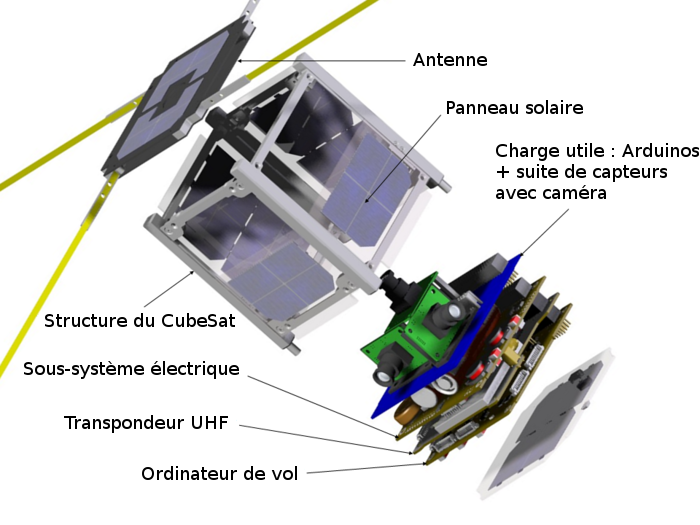
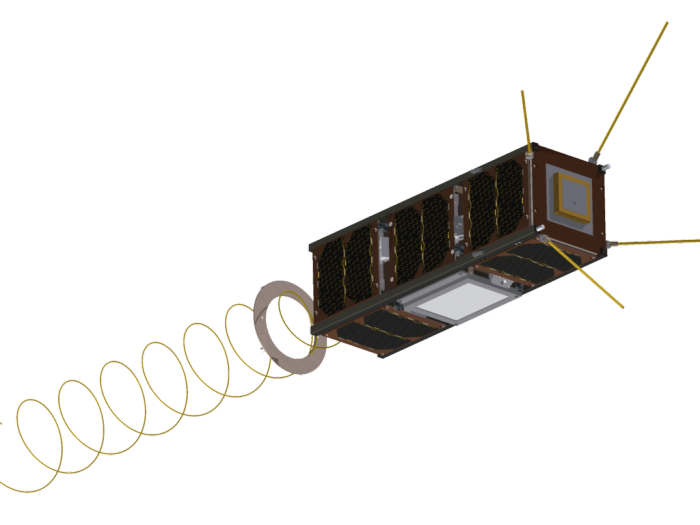
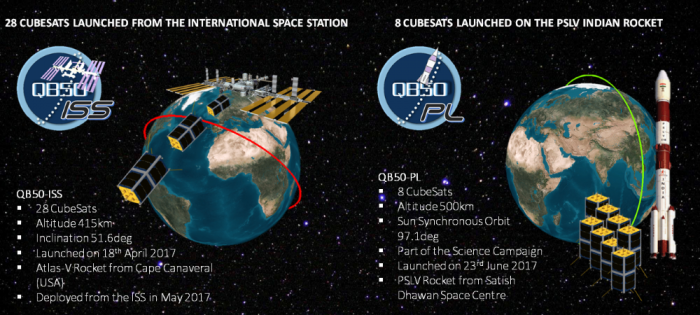
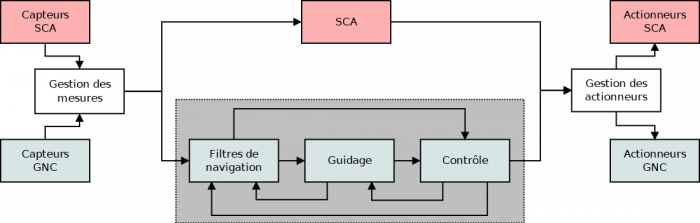
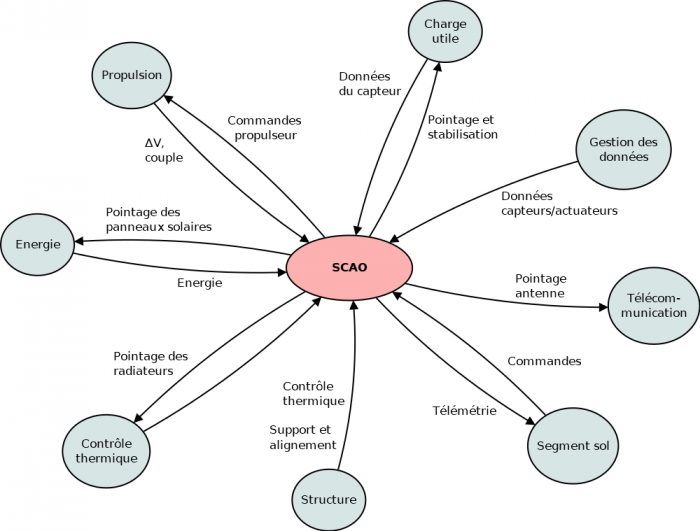
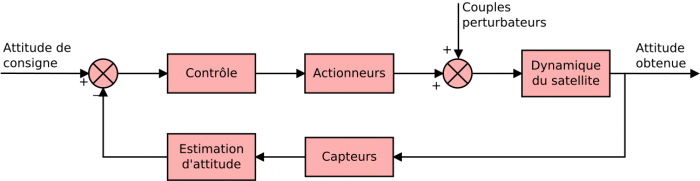

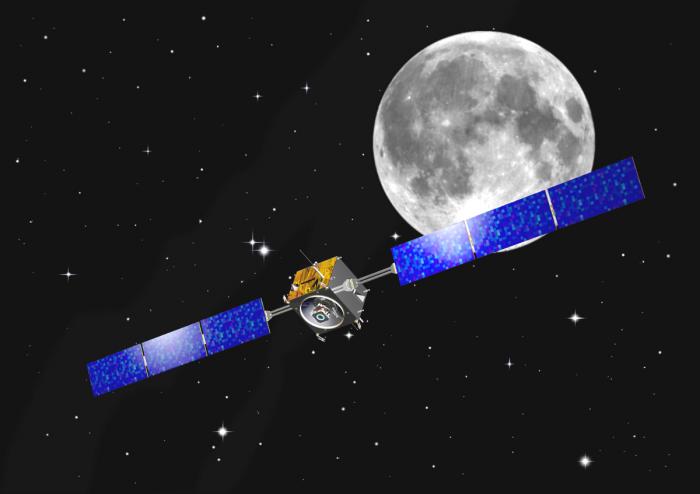
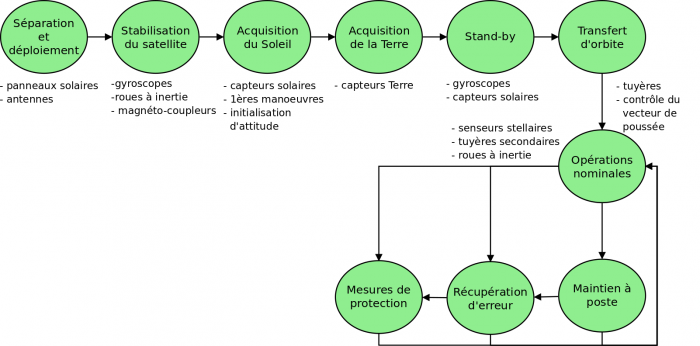
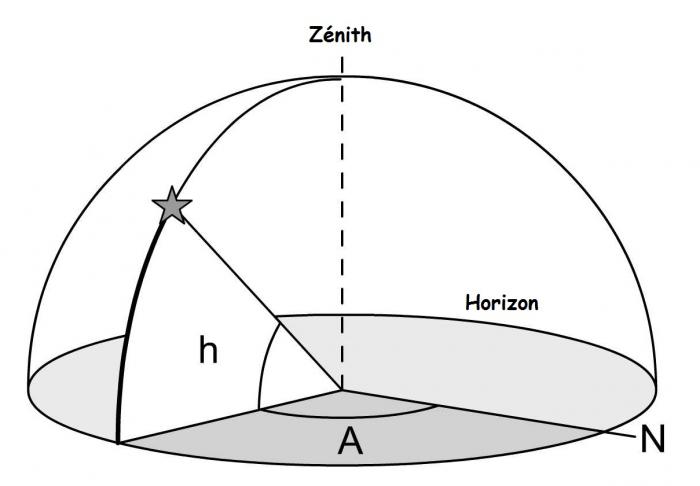
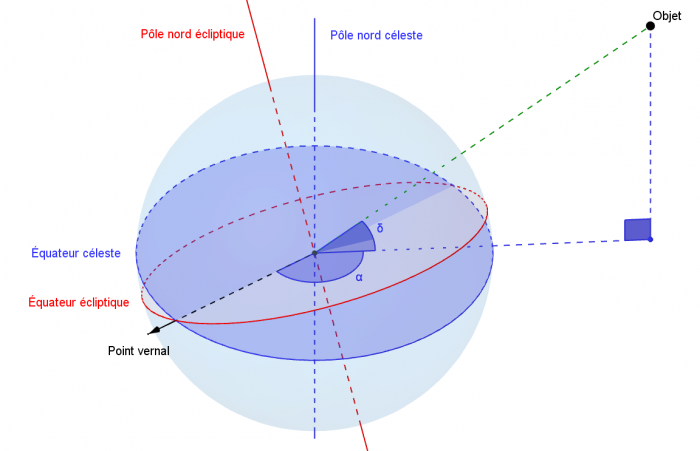
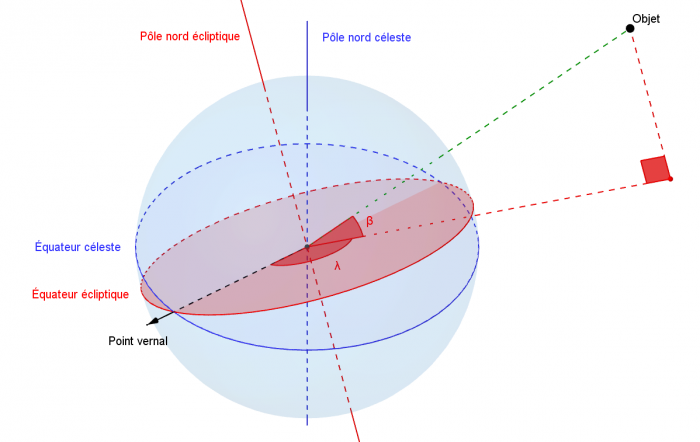
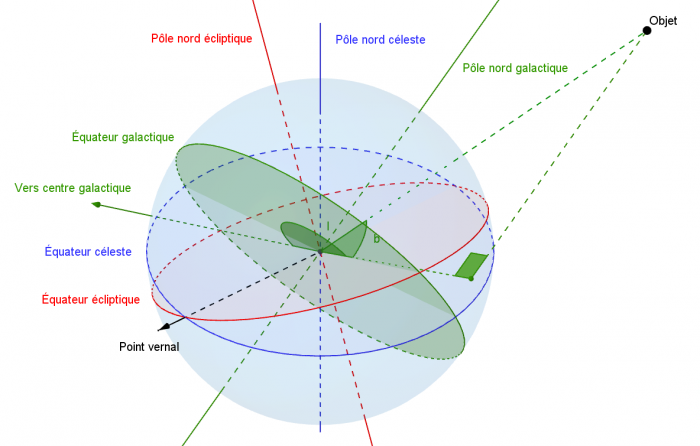
 coïncide avec l'axe de rotation de la Terre et les axes
coïncide avec l'axe de rotation de la Terre et les axes  et
et  sont fixés par rapport à la Terre.
sont fixés par rapport à la Terre.
 pointe vers le
pointe vers le  est normal au plan orbital.
est normal au plan orbital.
 est ainsi aligné avec le
est ainsi aligné avec le  pointe le long de l'inverse du moment cinétique orbital. L'axe
pointe le long de l'inverse du moment cinétique orbital. L'axe  vient compléter le trièdre.
vient compléter le trièdre. est parallèle au vecteur vitesse du satellite,
est parallèle au vecteur vitesse du satellite,  est le vecteur normal à la trajectoire à la position du satellite dans le plan de l'orbite et orienté vers le centre de la Terre, et
est le vecteur normal à la trajectoire à la position du satellite dans le plan de l'orbite et orienté vers le centre de la Terre, et  est parallèle et de même sens que le moment cinétique orbital.
est parallèle et de même sens que le moment cinétique orbital. ,
,  et
et  .
.
 , avec les axes
, avec les axes  et
et  , incliné par rapport à un référentiel
, incliné par rapport à un référentiel  , d'axes
, d'axes  et
et  , d'un angle
, d'un angle  . Le vecteur
. Le vecteur  peut être exprimé dans ces deux systèmes sous forme matricielle :
peut être exprimé dans ces deux systèmes sous forme matricielle : et
et  .
.
 . Cette matrice transforme le vecteur
. Cette matrice transforme le vecteur  du premier référentiel
du premier référentiel  vers le second
vers le second  .
.

 dans
dans  à partir de son expression
à partir de son expression  dans
dans  s'écrit :
s'écrit :
![\bold v_B = [T]_{B|R} \bold v_R](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation20.png) avec
avec ![[T]_{B|R} = \begin{pmatrix} \bold B_x \cdot \bold R_x & \bold B_x \cdot \bold R_y & \bold B_x \cdot \bold R_z \\ \bold B_y \cdot \bold R_x & \bold B_y \cdot \bold R_y & \bold B_y \cdot \bold R_z \\ \bold B_z \cdot \bold R_x & \bold B_z \cdot \bold R_y & \bold B_z \cdot \bold R_z \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation21.png)
 par rapport à
par rapport à  . On l'appelle également matrice de rotation ou matrice de transformation des coordonnées de
. On l'appelle également matrice de rotation ou matrice de transformation des coordonnées de  vers
vers  .
.
 autour de chacun de ses trois axes se retrouvent décrites par les matrices de rotation suivantes :
autour de chacun de ses trois axes se retrouvent décrites par les matrices de rotation suivantes :
![[T(\theta_1)]_1 = \begin{pmatrix} 1 & 0 & 0 \\ 0 & c_{\theta_1} & s_{\theta_1} \\ 0 & -s_{\theta_1} & c_{\theta_1} \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation27.png) ,
, ![[T(\theta_2)]_2 = \begin{pmatrix} c_{\theta_2} & 0 & -s_{\theta_2} \\ 0 & 1 & 0 \\ s_{\theta_2} & 0 & c_{\theta_2} \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation28.png) et
et ![[T(\theta_3)]_3 = \begin{pmatrix} c_{\theta_3} & s_{\theta_3} & 0 \\ -s_{\theta_3} & c_{\theta_3} & 0 \\ 0 & 0 & 1 \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation29.png)
![[T(\theta_i)]_i](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation30.png) indique une rotation d'angle
indique une rotation d'angle  autour du i-ème axe du référentiel fixé sur le corps.
autour du i-ème axe du référentiel fixé sur le corps.
![[T]^{-1} = [T]^T](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation32.png) et
et ![[T][T]^T = [I] = [T]^T[T]](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation33.png)
![\bold v_R = [T]_{R|B}^T \bold v_B = \begin{pmatrix} \bold B_x \cdot \bold R_x & \bold B_y \cdot \bold R_x & \bold B_z \cdot \bold R_x \\ \bold B_x \cdot \bold R_y & \bold B_y \cdot \bold R_y & \bold B_z \cdot \bold R_y \\ \bold B_x \cdot \bold R_z & \bold B_y \cdot \bold R_z & \bold B_z \cdot \bold R_z \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation34.png)
![[T]_{sat|inertiel} = [T]_{sat|orbite} [T]_{orbite|Terre} [T]_{Terre|inertiel}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation35.png)
 , autour de l'axe Oz, fait passer de (O,x,y,z) au référentiel (O,u,v,z) (en bleu).
, autour de l'axe Oz, fait passer de (O,x,y,z) au référentiel (O,u,v,z) (en bleu). , autour de l'axe Ou (ligne des nœuds), fait passer de (O,u,v,z) à (O,u,w,z’) (en vert).
, autour de l'axe Ou (ligne des nœuds), fait passer de (O,u,v,z) à (O,u,w,z’) (en vert). , ou rotation propre, autour de l'axe Oz’, fait passer de (O,u,w,z’) au référentiel lié au solide (O,x’,y’,z’) (en rouge).
, ou rotation propre, autour de l'axe Oz’, fait passer de (O,u,w,z’) au référentiel lié au solide (O,x’,y’,z’) (en rouge). , autour de l'axe
, autour de l'axe  . La deuxième rotation est l'inclinaison,
. La deuxième rotation est l'inclinaison,  , autour de la ligne de noeuds. La dernière rotation est l'anomalie vraie,
, autour de la ligne de noeuds. La dernière rotation est l'anomalie vraie,  , autour de la normale à l'orbite.
, autour de la normale à l'orbite. du satellite.
du satellite. par rapport au référentiel
par rapport au référentiel  :
:
![[T(\theta_1)]_1 \leftarrow [T(\theta_2)]_2 \leftarrow [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation46.png)
![[T]_{B|A} = [T(\theta_1)]_1 [T(\theta_2)]_2 [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation47.png) , donc :
, donc : ![[T]_{B|A} = \begin{pmatrix} c_{\theta_2} c_{\theta_3} & c_{\theta_2} s_{\theta_3} & -s_{\theta_2} \\ s_{\theta_1} s_{\theta_2} c_{\theta_3} - c_{\theta_1} s_{\theta_3} & s_{\theta_1} s_{\theta_2} s_{\theta_3} + c_{\theta_1} c_{\theta_3} & s_{\theta_1} c_{\theta_2} \\ c_{\theta_1} s_{\theta_2} c_{\theta_3} +s_{\theta_1} s_{\theta_3} & c_{\theta_1} s_{\theta_2} s_{\theta_3} - s_{\theta_1} c_{\theta_3} & c_{\theta_1} c_{\theta_2} \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude/equation48.png)
 et
et  .
.
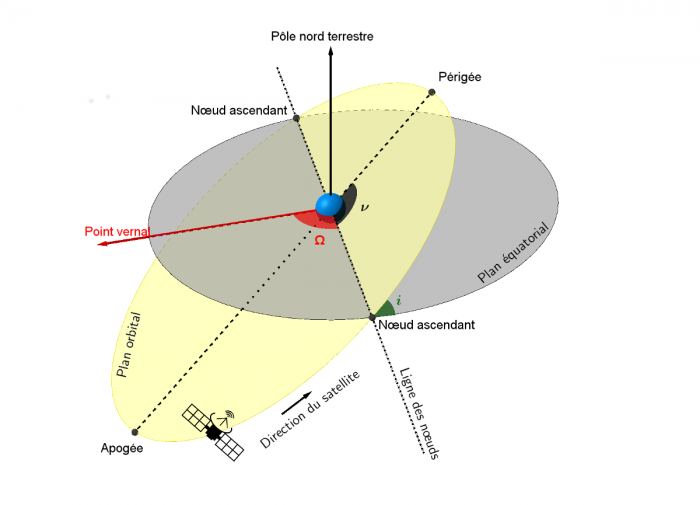
 ), l'inclinaison (
), l'inclinaison ( ) et l'anomalie vraie (
) et l'anomalie vraie ( ).
).
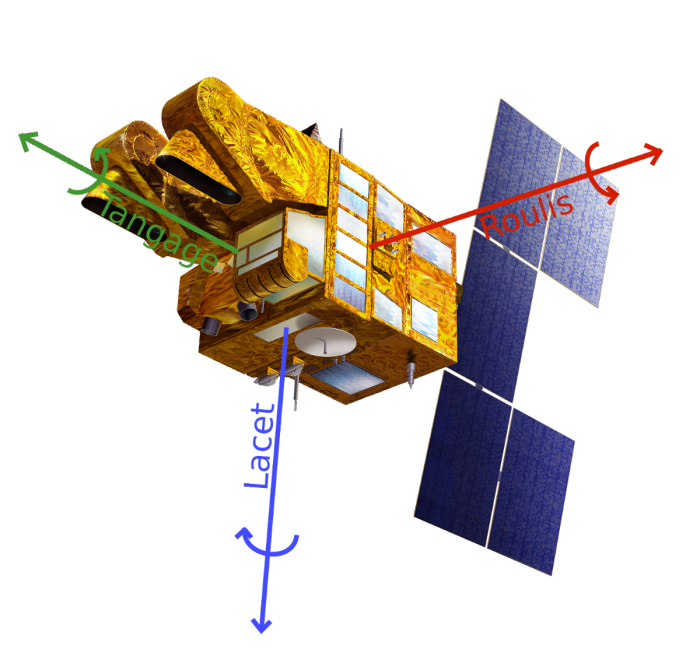
 . C'est un vecteur unité possédant les mêmes composantes dans les référentiels de départ et d'arrivée :
. C'est un vecteur unité possédant les mêmes composantes dans les référentiels de départ et d'arrivée :  . Ainsi, 4 grandeurs sont requises pour décrire de façon non-ambigüe l'orientation par rapport à un référenciel : les 3 composantes de
. Ainsi, 4 grandeurs sont requises pour décrire de façon non-ambigüe l'orientation par rapport à un référenciel : les 3 composantes de  et l'angle de la rotation,
et l'angle de la rotation,  .
.
 . Le quaternion contient la même information qu'une MCD à 9 éléments, tout en s'affranchissant des problèmes de singularité rencontrés avec les angles d'Euler. Ils sont à la fois compacts et une représentation efficace de l'orientation pour la détermination d'attitude. Une même rotation est représentée par les quaternions
. Le quaternion contient la même information qu'une MCD à 9 éléments, tout en s'affranchissant des problèmes de singularité rencontrés avec les angles d'Euler. Ils sont à la fois compacts et une représentation efficace de l'orientation pour la détermination d'attitude. Une même rotation est représentée par les quaternions  et
et  . On note également que les quatre paramètres d'Euler ne sont pas indépendants, mais contraints par la relation suivante :
. On note également que les quatre paramètres d'Euler ne sont pas indépendants, mais contraints par la relation suivante :

 , les paramètres d'Euler sont :
, les paramètres d'Euler sont :  , avec
, avec  ,
,  ,
,  et
et  .
.
![[T]_{B|R} = [T(\bold q)] = \begin{pmatrix} 1-2(q_2^2+q_3^2) & 2(q_1q_2+q_3q_0) & 2(q_1 q_3 - q_2 q_0) \\ 2(q_2q_1-q_3q_0) & 1-2(q_1^2+q_3^2) & 2(q_2q_3+q_1q_0) \\ 2(q_3q_1+q_2q_0) & 2(q_3q_2-q_1q_0) & 1-2(q_1^2+q_2^2) \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude-quaternions/equation15.png)
 peut opérer sur un vecteur vivant lui dans
peut opérer sur un vecteur vivant lui dans  . Notons tout d'abord qu'un vecteur est un quaternion pur dont la partie réelle est nulle. L'opérateur
. Notons tout d'abord qu'un vecteur est un quaternion pur dont la partie réelle est nulle. L'opérateur  décrivant une rotation s'exprime avec le quaternion unitaire
décrivant une rotation s'exprime avec le quaternion unitaire  :
:  . Le vecteur ainsi obtenu conserve la longueur du vecteur initial, comme le fait une rotation. Cet opérateur se développe de la manière suivante :
. Le vecteur ainsi obtenu conserve la longueur du vecteur initial, comme le fait une rotation. Cet opérateur se développe de la manière suivante :

 et
et  décrivant respectivement les opérateurs
décrivant respectivement les opérateurs  et
et  . Le premier opérateur est appliqué au vecteur
. Le premier opérateur est appliqué au vecteur  pour obtenir le vecteur
pour obtenir le vecteur  , puis le second est appliqué à
, puis le second est appliqué à  pour obtenir
pour obtenir  . La composition des opérateurs
. La composition des opérateurs  s'écrit :
s'écrit :



 ,
,  ,
,  ,
,  sont des nombres réels, et
sont des nombres réels, et  ,
,  ,
,  sont des symboles respectant les relations quaternioniques :
sont des symboles respectant les relations quaternioniques :

 est appelé partie réelle de
est appelé partie réelle de  et
et  est appelé partie imaginaire.
est appelé partie imaginaire.
 où s'applique l'addition composant par composant. Soient deux quaternions
où s'applique l'addition composant par composant. Soient deux quaternions  et
et  :
:

 ,
,  et
et  sont définis de la manière suivante :
sont définis de la manière suivante :

![\bold q \ \bold p = [Q(\bold q)] \bold p](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude-quaternions/equation53.png)
![[Q(\bold q)] = \begin{pmatrix} q_0 & -q_1 & -q_2 & -q_3 \\ q_1 & q_0 & -q_3 & q_2 \\ q_2 & q_3 & q_0 & -q_1 \\ q_3 & -q_2 & q_1 & q_0 \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-referentiels-et-transformations-representation-d-attitude-quaternions/equation54.png) .
.
 et
et  sont :
sont :
 et
et 
 et
et 

 est la partie scalaire de
est la partie scalaire de  et
et  est la partie vectorielle. Ainsi, la partie scalaire est toujours réelle et la partie vectorielle toujours purement imaginaire. Bien que l'on ait dit qu'un quaternion est un vecteur dans un espace à 4 dimensions, il est courant de définir un vecteur pour la partie imaginaire d'un quaternion :
est la partie vectorielle. Ainsi, la partie scalaire est toujours réelle et la partie vectorielle toujours purement imaginaire. Bien que l'on ait dit qu'un quaternion est un vecteur dans un espace à 4 dimensions, il est courant de définir un vecteur pour la partie imaginaire d'un quaternion :  et
et 
 représente sa position,
représente sa position,  sa vitesse et que les dérivées temporelles sont indiquées par un point, alors l'équation cinématique du mouvement s'écrit
sa vitesse et que les dérivées temporelles sont indiquées par un point, alors l'équation cinématique du mouvement s'écrit  . L'équation dynamique du mouvement quant à elle s'écrit dans un repère galiléen
. L'équation dynamique du mouvement quant à elle s'écrit dans un repère galiléen  ou
ou  , avec
, avec  la quantité de mouvement,
la quantité de mouvement,  la résultante des forces appliquées et
la résultante des forces appliquées et  la masse de la particule. Comme vous le verrez par la suite, dès lors que l'on s'intéresse aux mouvement d'attitude (autour du centre d'inertie), les vecteur de position et de vitesse sont respectivement remplacés par la matrice d'attitude et le vecteur de vitesse angulaire
la masse de la particule. Comme vous le verrez par la suite, dès lors que l'on s'intéresse aux mouvement d'attitude (autour du centre d'inertie), les vecteur de position et de vitesse sont respectivement remplacés par la matrice d'attitude et le vecteur de vitesse angulaire  . Les forces et quantités de mouvement sont quant à elles remplacées par le couple
. Les forces et quantités de mouvement sont quant à elles remplacées par le couple  et le moment angulaire
et le moment angulaire  . La cinématique et la dynamique du mouvement rotationnel, ou d'attitude, sont plus compliquées que celles du mouvement de translation. Elles sont détaillées dans la section suivante.
. La cinématique et la dynamique du mouvement rotationnel, ou d'attitude, sont plus compliquées que celles du mouvement de translation. Elles sont détaillées dans la section suivante.
 allant de l'origine du repère au centre de l'objet
allant de l'origine du repère au centre de l'objet
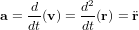
 par rapport à sa position originelle
par rapport à sa position originelle est un vecteur unitaire dans la direction de l'axe de rotation, la vitesse angulaire est alors obtenue par :
est un vecteur unitaire dans la direction de l'axe de rotation, la vitesse angulaire est alors obtenue par : 

 à partir de sa position dans un référentiel terrestre (fixé par rapport à la Terre) noté
à partir de sa position dans un référentiel terrestre (fixé par rapport à la Terre) noté  , on peut écrire :
, on peut écrire :
![\bold{r}_I = [T]_{I|F} \ \bold{r}_F](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation10.png)
![\bold{v}_I = \frac{d}{dt} (\bold{r}_I) = [T]_{I|F} \ \frac{d}{dt} (\bold{r}_F) + \frac{d}{dt}([T]_{I|F}) \ \bold{r}_F = [T]_{I|F} \ \frac{d}{dt}(\bold{r}_F) + ([T]_{I|F} \ [\Omega]) \ \bold{r}_F](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation11.png)
![\bold{v}_I = [T]_{I/F} ([\Omega] \ \bold{r}_F + \bold{v}_F)](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation12.png)
![\bold{a}_I = \frac{d}{dt}(\bold{v}_I) = \frac{d}{dt}([T]_{I/F}) ([\Omega] \ \bold{r}_F + \bold{v}_F) + [T]_{I/F} \left[ \frac{d}{dt}([\Omega]) \ \bold{r}_F + [\Omega] \ \frac{d}{dt}(\bold{r}_F) + \frac{d}{dt}(\bold{v}_F)\right]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation13.png)
![\bold{a}_I = [T]_{I/F} \left[ [\Omega] \left([\Omega] \ \bold{r}_F \right) + 2 \ [\Omega] \ \bold{v}_F + \frac{d}{dt}([\Omega] \ \bold{r}_F + \bold{a}_F \right]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation14.png)
![\bold{F}_F = [T]_{F/I} \left( m \ \bold{a}_I \right) = m \left[ [\Omega] \left( [\Omega] \ \bold{r}_F \right) + 2 \ [\Omega] \ \bold{v}_F + \frac{d}{dt}([\Omega]) \ \bold{r}_F + \bold{a}_F \right]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation15.png)
![\frac{d}{dt} \left( [\Omega] \right)](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation16.png) est l'accélération angulaire. On introduit ici les accélérations centripète
est l'accélération angulaire. On introduit ici les accélérations centripète ![[\Omega] \left( [\Omega] \ \bold{r}_F \right)](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation17.png) et de Coriolis
et de Coriolis ![2 \ [\Omega] \ \bold{v}_F](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation18.png) .
.
 .
.
 en rotation par rapport à un référentiel
en rotation par rapport à un référentiel  avec une vitesse angulaire
avec une vitesse angulaire  . Si la matrice d'attitude s'exprime
. Si la matrice d'attitude s'exprime ![[T]_{B|A}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation23.png) , alors :
, alors :
![\frac{d}{dt} \left( [T]_{B|A} \right) = -[\Omega] \ [T]_{B|A}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation24.png) avec
avec ![[\Omega] = \begin{pmatrix} 0 & -\omega_z & \omega_y \\ \omega_z & 0 & -\omega_x \\ -\omega_y & \omega_x & 0 \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation25.png)
 représentant la vitesse angulaire du référentiel
représentant la vitesse angulaire du référentiel  par rapport au référentiel
par rapport au référentiel  , avec
, avec  .
.
![[T(\theta_1)]_1 \leftarrow [T(\theta_2)]_2 \leftarrow [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation30.png) conduisant du référentiel
conduisant du référentiel  au référentiel
au référentiel  l'équation de la cinématique est réécrite :
l'équation de la cinématique est réécrite :

 ).
).
 de la force
de la force  par rapport à au point
par rapport à au point  est défini par :
est défini par :

 est non nul. Dans ce cas, il est possible de montrer que le moment global d'un tel couple par rapport à n'importe quel point est égal au produit vectoriel caractéristique du couple :
est non nul. Dans ce cas, il est possible de montrer que le moment global d'un tel couple par rapport à n'importe quel point est égal au produit vectoriel caractéristique du couple :

 est le vecteur allant du centre de gravité du système au point d'application de la force
est le vecteur allant du centre de gravité du système au point d'application de la force  . Si, pour un corps solide sans contraine, une force va accélérer son centre de masse, un couple aura lui pour effet d'induire un mouvement de rotation autour du centre de masse.
. Si, pour un corps solide sans contraine, une force va accélérer son centre de masse, un couple aura lui pour effet d'induire un mouvement de rotation autour du centre de masse.
![[I] = \begin{pmatrix} I_{xx} & -I_{xy} & -I_{xz} \\ -I_{xy} & I_{yy} & -I_{yz} \\ -I_{xz} & -I_{yz} & I_{zz} \end{pmatrix} = \begin{pmatrix} \sum_{i=1}^{n}{m_i \left(y_i^2+z_i^2 \right)} & -\sum_{i=1}^{n}{m_i \ x_i \ y_i} & -\sum_{i=1}^{n}{m_i \ x_i \ z_i} \\ -\sum_{i=1}^{n}{m_i \ x_i \ y_i} & \sum_{i=1}^{n}{m_i \left(x_i^2+z_i^2 \right)} & -\sum_{i=1}^{n}{m_i \ y_i \ z_i} \\ -\sum_{i=1}^{n}{m_i \ x_i \ z_i} & -\sum_{i=1}^{n}{m_i \ y_i \ z_i} & \sum_{i=1}^{n}{m_i \left(x_i^2+y_i^2 \right)} \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-dynamique-du-satellite/equation9.png) ,
,
 . Considérons un système matériel qui est la somme de
. Considérons un système matériel qui est la somme de  masses ponctuelles. Le moment angulaire, ou moment cinétique, par rapport à un point
masses ponctuelles. Le moment angulaire, ou moment cinétique, par rapport à un point  est le moment de la quantité de mouvement
est le moment de la quantité de mouvement  par rapport à ce point
par rapport à ce point  :
:

![[I]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-dynamique-du-satellite/equation16.png) et de la vitesse angulaire
et de la vitesse angulaire  :
:
![\bold L = [I] \ \boldsymbol\omega](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-dynamique-du-satellite/equation18.png)
 est le moment d'inertie d'une masse ponctuelle,
est le moment d'inertie d'une masse ponctuelle, est le moment angulaire de la particule par rapport à l'origine.
est le moment angulaire de la particule par rapport à l'origine. dont l'origine se trouve au centre de masse du satellite. Notons
dont l'origine se trouve au centre de masse du satellite. Notons  le vecteur vitesse angulaire du référentiel
le vecteur vitesse angulaire du référentiel  par rapport au référentiel inertiel
par rapport au référentiel inertiel  .
.
 est le moment angulaire du corps solide par rapport à son centre de masse et
est le moment angulaire du corps solide par rapport à son centre de masse et  sont les couples extérieurs agissant sur ce corps. On appelle parfois cette équation l'équation d'Euler. Elle montre que seuls les couples extérieurs peuvent modifier le moment cinétique dans un système.
sont les couples extérieurs agissant sur ce corps. On appelle parfois cette équation l'équation d'Euler. Elle montre que seuls les couples extérieurs peuvent modifier le moment cinétique dans un système.
![\bold L = [I] \boldsymbol\omega+ \bold h](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-dynamique-du-satellite/equation28.png) :
:
![[I] \dot{\boldsymbol\omega} = \sum_{i=1}^{n}{\bold C_i^{ext} - \dot{\bold h} - \dot{[I]} \boldsymbol\omega}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-dynamique-du-satellite/equation29.png)
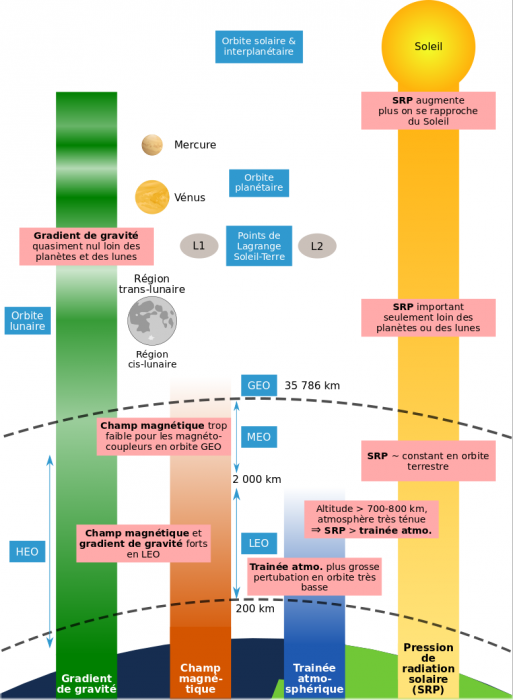
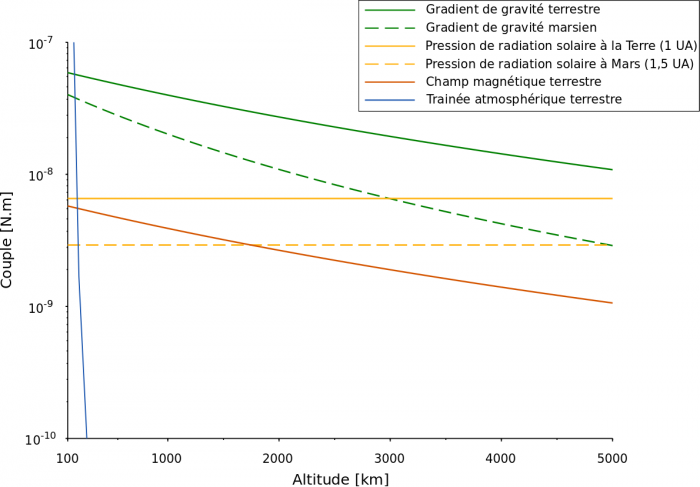
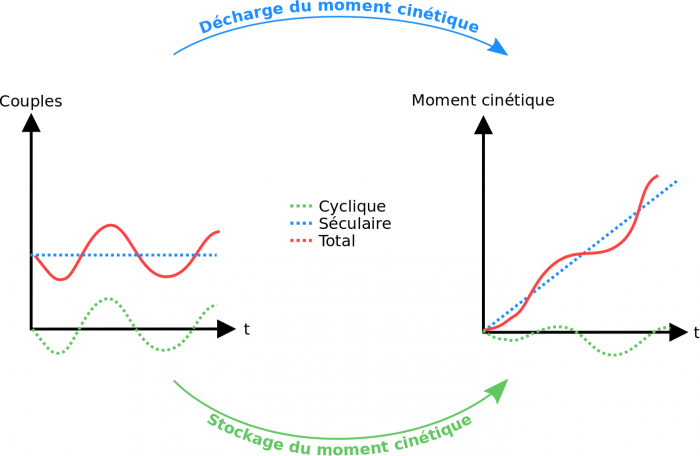

 est donné par :
est donné par :

 (en T) représente le champ magnétique.
(en T) représente le champ magnétique.
 , où
, où  (en T.m3) est le moment magnétique terrestre multiplié par la constante magnétique,
(en T.m3) est le moment magnétique terrestre multiplié par la constante magnétique,  la distance entre le satellite et le centre du corps , et enfin
la distance entre le satellite et le centre du corps , et enfin  une fonction sans unité de la latitude magnétique qui prend des valeurs allant de 1 au niveau de l'équateur magnétique à 2 aux pôles magnétiques. Des modèles utilisant des harmoniques sphériques existent, à la manière du champ gravitationnel terrestre, mais la précision qu'ils permettent d'atteindre n'est pas nécessaire lors des premières phases de développement du projet spatial. L'un de ces modèles, le "12th generation of the International Geomagnetic Reference Field (IGRF)", est utilisé pour calculer le champ magnétique obtenu sur une trajectoire circulaire de 500 km d'altitude inclinée de 50°. Celui-ci est représenté par rapport au plan local tangent ou repère NED ("North East Down"). On remarque qu'il varie grandement au cours de l'orbite.
une fonction sans unité de la latitude magnétique qui prend des valeurs allant de 1 au niveau de l'équateur magnétique à 2 aux pôles magnétiques. Des modèles utilisant des harmoniques sphériques existent, à la manière du champ gravitationnel terrestre, mais la précision qu'ils permettent d'atteindre n'est pas nécessaire lors des premières phases de développement du projet spatial. L'un de ces modèles, le "12th generation of the International Geomagnetic Reference Field (IGRF)", est utilisé pour calculer le champ magnétique obtenu sur une trajectoire circulaire de 500 km d'altitude inclinée de 50°. Celui-ci est représenté par rapport au plan local tangent ou repère NED ("North East Down"). On remarque qu'il varie grandement au cours de l'orbite.
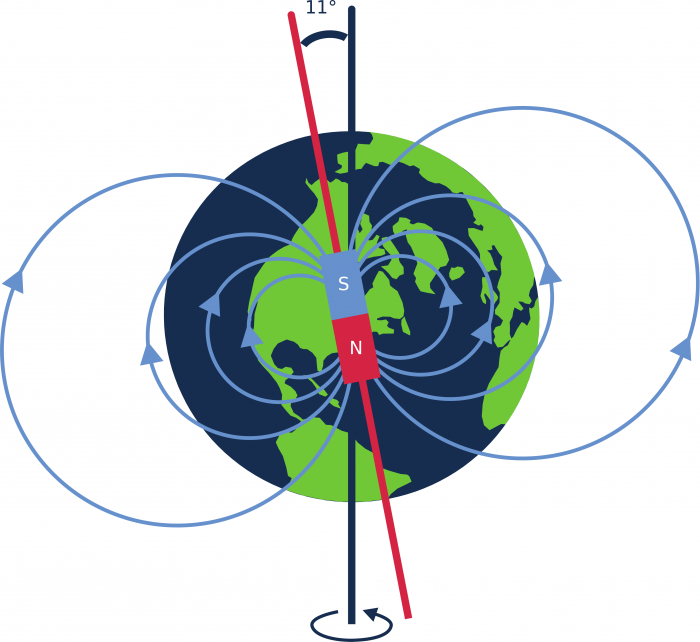
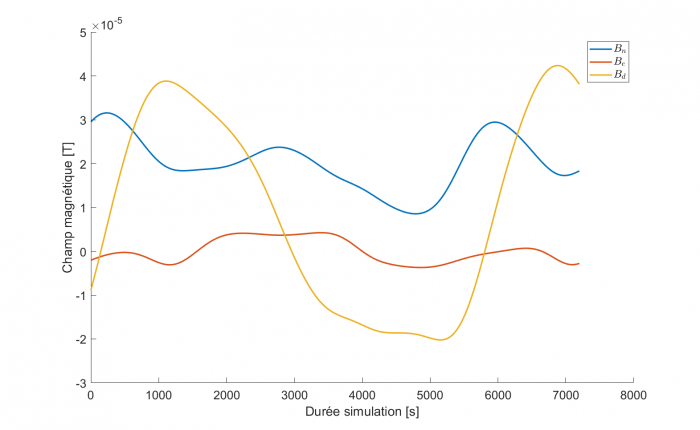
 de la manière suivante :
de la manière suivante :
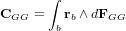
 est le vecteur position allant du centre de gravité du satellite à l'élément de masse et
est le vecteur position allant du centre de gravité du satellite à l'élément de masse et  est la force de gravité s'appliquant sur ce même élément de masse :
est la force de gravité s'appliquant sur ce même élément de masse :
 est la constante gravitationnelle, elle vaut
est la constante gravitationnelle, elle vaut  ,
,  est la masse du corps attracteur et
est la masse du corps attracteur et  est le vecteur position de l'élément de masse
est le vecteur position de l'élément de masse  dans le référentiel inertiel (
dans le référentiel inertiel ( ). On peut finalement réécrire l'équation donnant le couple de gradient de gravité de la manière suivante :
). On peut finalement réécrire l'équation donnant le couple de gradient de gravité de la manière suivante :
![\bold C_{GG} = \frac{3 \ G \ M}{|\bold r_{CG}|^5} \ \bold r_{CG} \wedge \left([I] \ \bold r_{CG} \right)](../pages_nanosats/equations_nanosats-comprendre-perturbations-perturbations-externes/equation20.png)
![[I]](../pages_nanosats/equations_nanosats-comprendre-perturbations-perturbations-externes/equation21.png) du satellite. Différentes propriétés sont visibles dans cette équation : la magnitude est inversement proportionnelle au cube de la distance au centre du corps attracteur, sa direction est perpendiculaire au rayon vecteur et il disparaît lorsque l'un des axes principaux du satellite est aligné avec ce rayon vecteur.
du satellite. Différentes propriétés sont visibles dans cette équation : la magnitude est inversement proportionnelle au cube de la distance au centre du corps attracteur, sa direction est perpendiculaire au rayon vecteur et il disparaît lorsque l'un des axes principaux du satellite est aligné avec ce rayon vecteur.
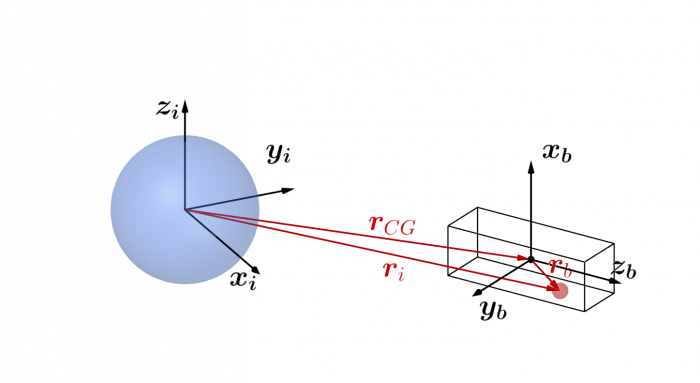
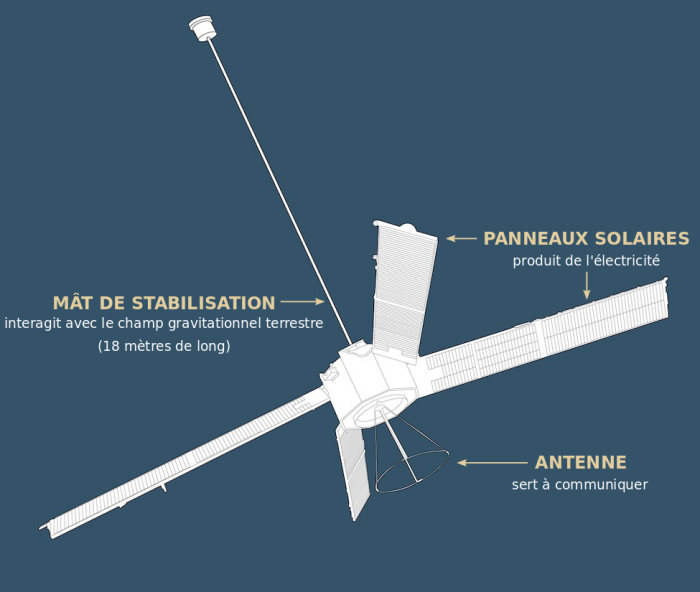
 surfaces d'aire
surfaces d'aire  , dont la normale orientée vers l'extérieur est notée
, dont la normale orientée vers l'extérieur est notée  dans le référentiel du satellite et de coefficient de réflexion
dans le référentiel du satellite et de coefficient de réflexion  (on lui attribue généralement une valeur de 0,6 pour un petit satellite).
(on lui attribue généralement une valeur de 0,6 pour un petit satellite).
 . L'angle entre ce vecteur et et la normale à la ième surface s'écrit alors :
. L'angle entre ce vecteur et et la normale à la ième surface s'écrit alors :

 avec
avec 
 (en W.m) est l'irradiance solaire moyenne (fonction de la distance au Soleil) et
(en W.m) est l'irradiance solaire moyenne (fonction de la distance au Soleil) et  (en m/s) est la vitesse de la lumière.
(en m/s) est la vitesse de la lumière.
 le vecteur allant du centre de masse du satellite au centre de pression de radiation solaire de la ième surface. Le couple de radiation solaire s'écrit alors :
le vecteur allant du centre de masse du satellite au centre de pression de radiation solaire de la ième surface. Le couple de radiation solaire s'écrit alors :
 ;
; ;
; .
.![\bold F_{PRS}^i = -P_S \ S_i \left[ 2 \left( \frac{R_{diff}^i}{3} + R_{spec}^i \ \textup{cos} \left(\theta_{PRS}^i \right) \right) \bold n_B^i + \left( 1-R_{spec}^i \right) \bold s \right] \textup{max} \left( \textup{cos} \left( \theta_{PRS}^i \right) \ ; \ 0 \right)](../pages_nanosats/equations_nanosats-comprendre-perturbations-perturbations-externes/equation37.png)
 le flux émis à la surface du Soleil et
le flux émis à la surface du Soleil et  le rayon du Soleil.
le rayon du Soleil.  est estimé en appliquant la loi de Stefan-Boltzmann au Soleil considéré comme un corps noir :
est estimé en appliquant la loi de Stefan-Boltzmann au Soleil considéré comme un corps noir :

 la constante de Stefan-Boltzmann et
la constante de Stefan-Boltzmann et  la température thermodynamique du corps noir. À la distance moyenne Terre-Soleil (1 UA) l'irradiance solaire (ou constante solaire) vaut 1362 W.m-2.
la température thermodynamique du corps noir. À la distance moyenne Terre-Soleil (1 UA) l'irradiance solaire (ou constante solaire) vaut 1362 W.m-2.
 (Terre-Soleil) on obtient l'inégalité suivante lorsque le satellite se trouve dans la zone d'ombre :
(Terre-Soleil) on obtient l'inégalité suivante lorsque le satellite se trouve dans la zone d'ombre :

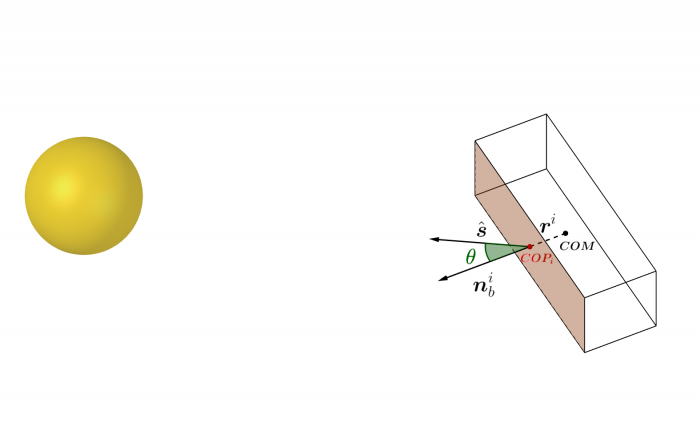
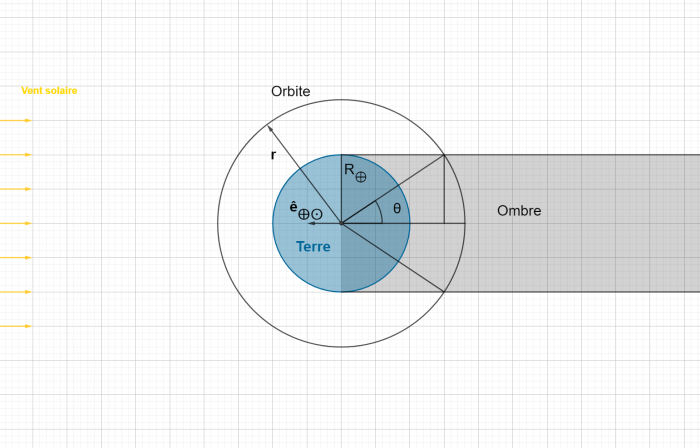
 , pour chacune des surfaces. La force s'exerçant sur chaque surface dépend de la vitesse relative du satellite par rapport à l'atmosphère. En première approximation, on considère que cette vitesse relative est égale à celle du satellite, mais en réalité ce n'est pas immédiatement la vitesse du satellite dans le référentiel inertiel, car l'atmosphère n'est pas stationnaire dans celui-ci. L'inclinaison de la ième surface par rapport à la vitesse relative du satellite s'exprime :
, pour chacune des surfaces. La force s'exerçant sur chaque surface dépend de la vitesse relative du satellite par rapport à l'atmosphère. En première approximation, on considère que cette vitesse relative est égale à celle du satellite, mais en réalité ce n'est pas immédiatement la vitesse du satellite dans le référentiel inertiel, car l'atmosphère n'est pas stationnaire dans celui-ci. L'inclinaison de la ième surface par rapport à la vitesse relative du satellite s'exprime :

 est le coefficient de trainée. Ce coefficient est déterminé de manière empirique et se situe généralement entre 1.5 et 2.5. Un couple apparaît lorsque la force agissant sur le centre de la pression atmosphérique ne passe pas par le centre de masse. Une estimation de ce couple est donnée par l'équation suivante :
est le coefficient de trainée. Ce coefficient est déterminé de manière empirique et se situe généralement entre 1.5 et 2.5. Un couple apparaît lorsque la force agissant sur le centre de la pression atmosphérique ne passe pas par le centre de masse. Une estimation de ce couple est donnée par l'équation suivante :
 est le vecteur allant du centre de masse du satellite au centre de pression de la ième surface.
est le vecteur allant du centre de masse du satellite au centre de pression de la ième surface.

 si
si  et
et  si
si  , avec
, avec  le vecteur unité pointant vers la normale extérieure à la photocellule
le vecteur unité pointant vers la normale extérieure à la photocellule  et
et  le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée.
le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée.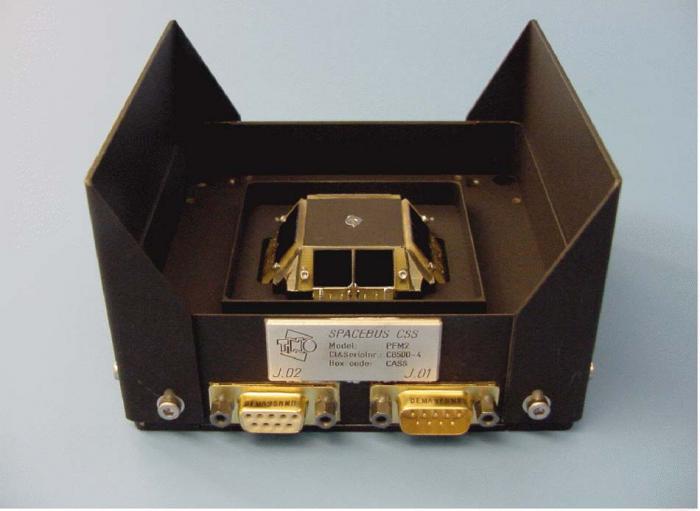
 de son champ magnétique (
de son champ magnétique ( étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les
étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les 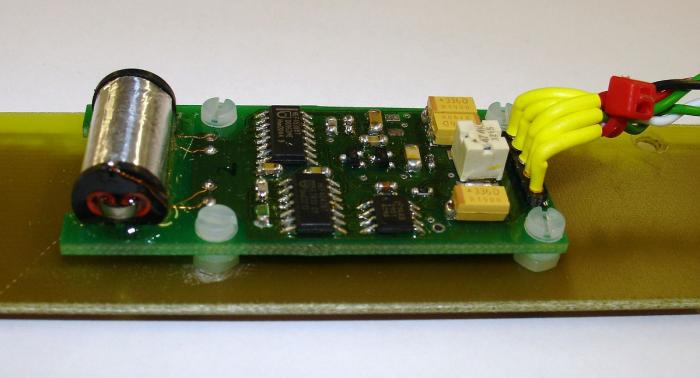

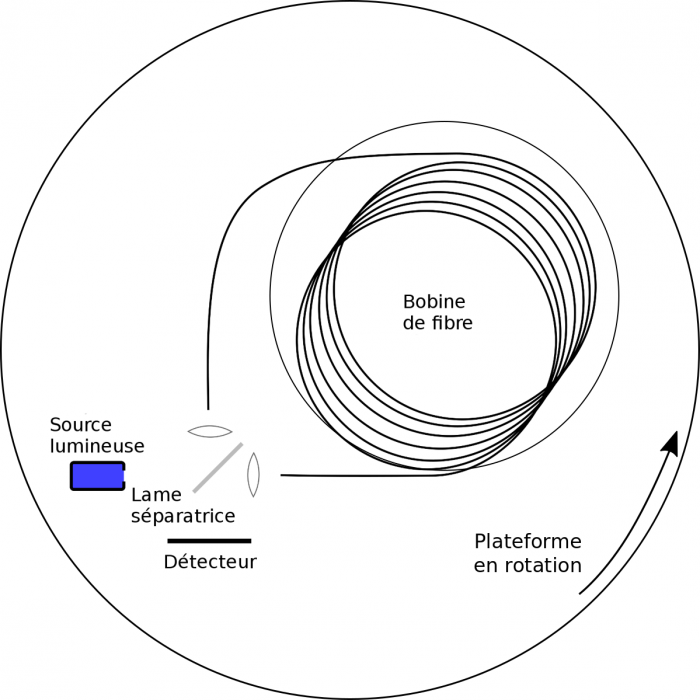
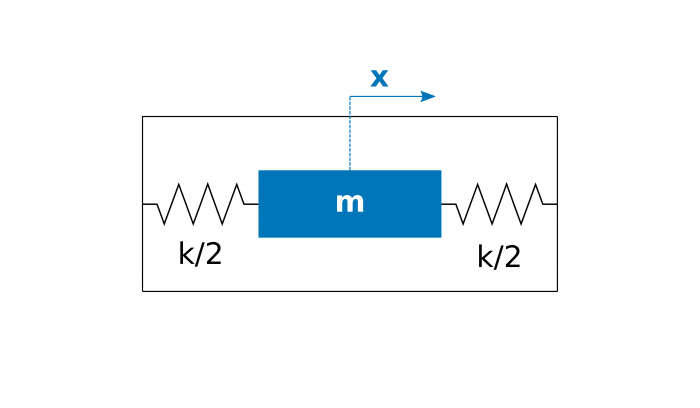
 , avec
, avec  l'accélération,
l'accélération,  la masse,
la masse,  la constante de raideur du ressort et
la constante de raideur du ressort et  le déplacement du ressort.
le déplacement du ressort.
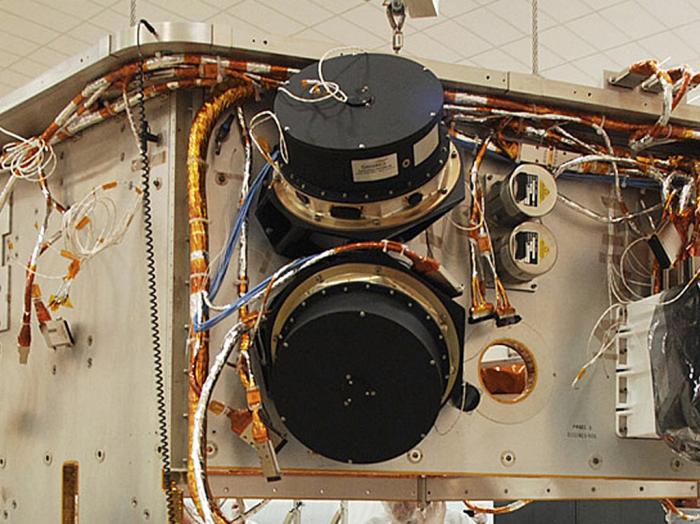
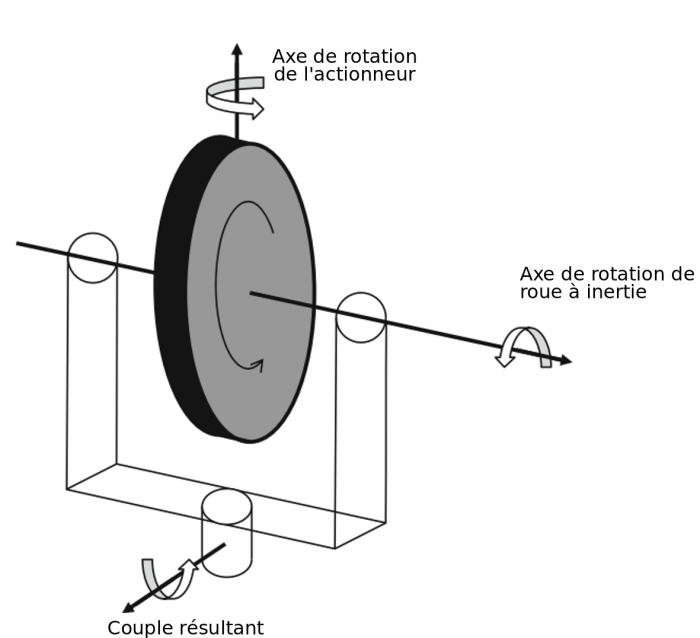
 (en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre
(en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre  , le magnéto-coupleur fournit alors un couple
, le magnéto-coupleur fournit alors un couple  . On distingue trois types de magnéto-coupleurs :
. On distingue trois types de magnéto-coupleurs :
 , de l'aire de la section de la bobine
, de l'aire de la section de la bobine  et du courant d'intensité
et du courant d'intensité  la parcourant. Ce moment dipolaire s'exprime alors
la parcourant. Ce moment dipolaire s'exprime alors  et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale.
et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale.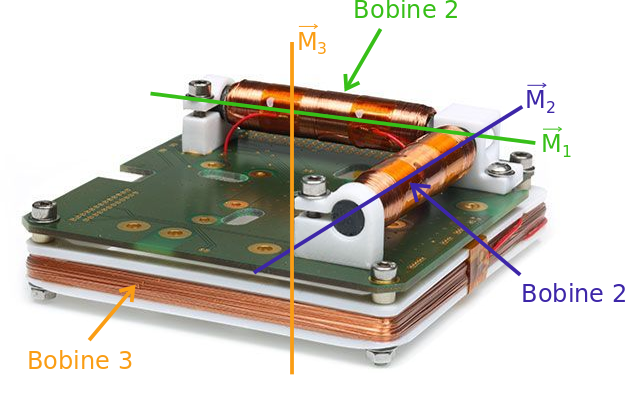
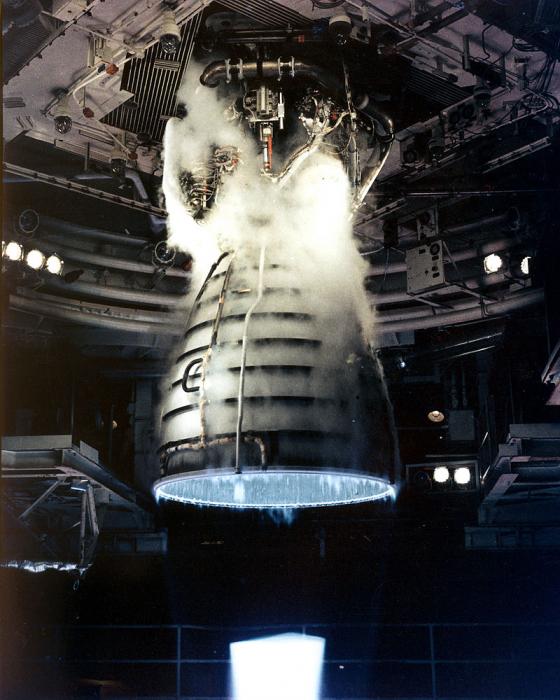
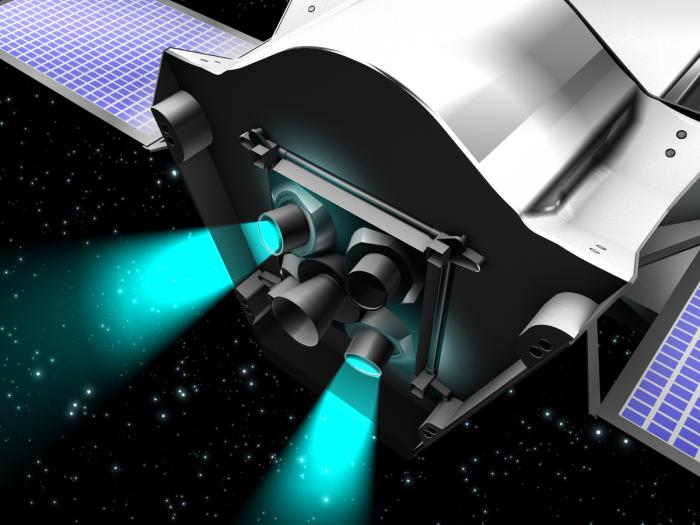
 qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée
qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée  , ce qui, par conservation de la quantité de mouvement, résulte en une
, ce qui, par conservation de la quantité de mouvement, résulte en une ![\bold F = \dot m \bold v_e \ \textup{[N]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation3.png) .
.

 ) du satellite :
) du satellite : 
 , il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir :
, il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir : 
![I_{tot} = \int_{0}^{\tau}{F \ dt} = v_e \ \int_{0}^{m_p}{dm} = v_e \ m_p \ \textup{[N.s]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation10.png) .
.
 , avec
, avec  le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
![I_{ssp} = \frac{I_{tot}}{m_{ps} \ g_0} \ \textup{[s]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation13.png) .
.
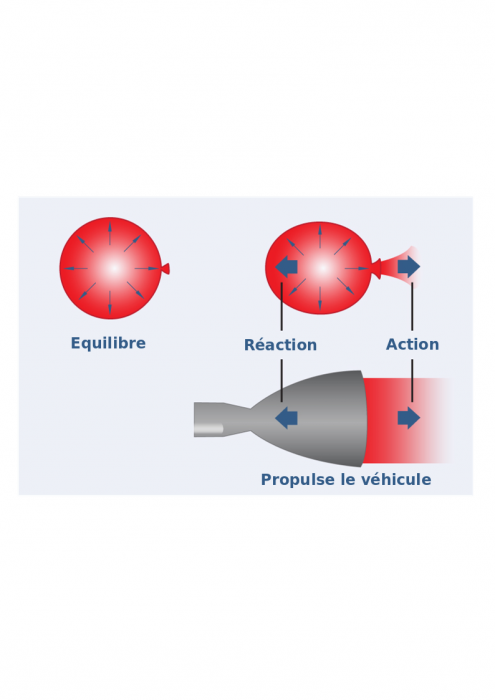
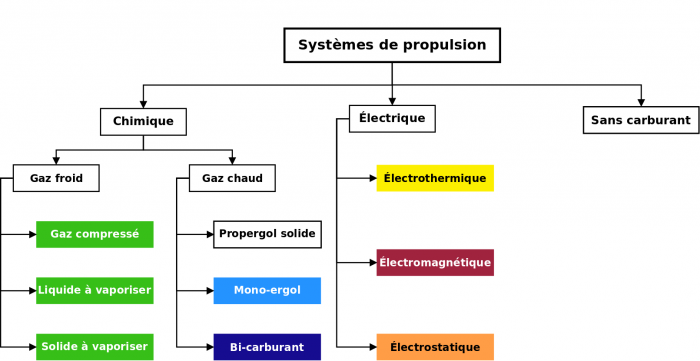
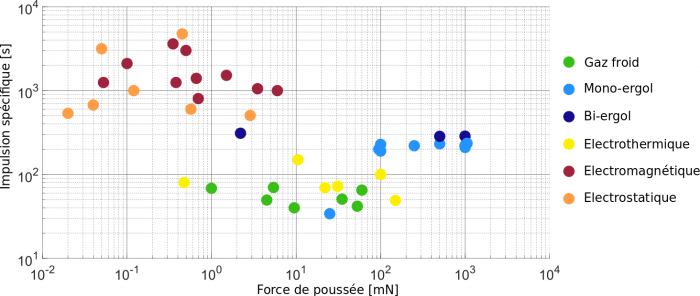
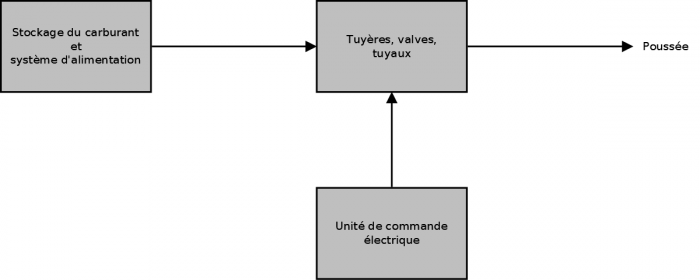
 , où
, où  et
et  sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
 créant une force de Coulomb (
créant une force de Coulomb ( ). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
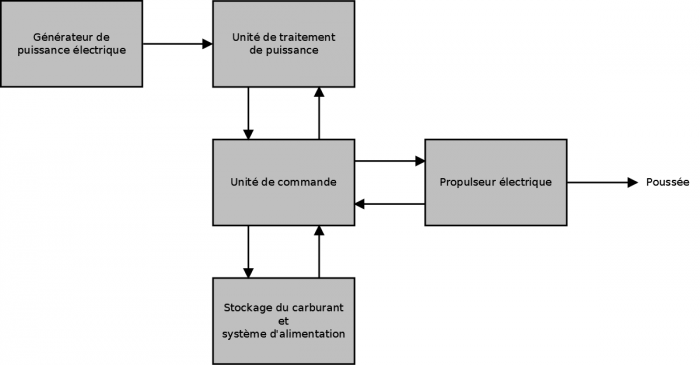
 définissant la direction mesurée (observée) de la source (la Terre, le Soleil, une étoile, le champ magnétique terrestre...), exprimée dans le repère lié au satellite. Le second est un vecteur unitaire
définissant la direction mesurée (observée) de la source (la Terre, le Soleil, une étoile, le champ magnétique terrestre...), exprimée dans le repère lié au satellite. Le second est un vecteur unitaire  qui définit la direction de référence de la source, exprimée dans le repère origine (généralement inertiel). L'estimation d'attitude consiste ici à déterminer la matrice de transformation orthogonale
qui définit la direction de référence de la source, exprimée dans le repère origine (généralement inertiel). L'estimation d'attitude consiste ici à déterminer la matrice de transformation orthogonale  satisfaisant pour chaque observation i :
satisfaisant pour chaque observation i :

 permettant de transformer les vecteurs de référence
permettant de transformer les vecteurs de référence  et
et  en vecteurs d'observation
en vecteurs d'observation  et
et  . Puisque l'on cherche à obtenir l'attitude suivant 3 axes, il nous faut créer deux bases orthonormées (y1, y2, y3) et (x1, x2, x3), respectivement associées aux vecteurs d'oservation et de référence. Il ne reste plus qu'à déduire la matrice de transformation orthogonale (ou MCD)
. Puisque l'on cherche à obtenir l'attitude suivant 3 axes, il nous faut créer deux bases orthonormées (y1, y2, y3) et (x1, x2, x3), respectivement associées aux vecteurs d'oservation et de référence. Il ne reste plus qu'à déduire la matrice de transformation orthogonale (ou MCD)  satisfaisant :
satisfaisant :
![\bold y_i = [C] \ \bold x_i](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation11.png) ,
,  ,
, 
 minimisant la fonction de moindres carrés :
minimisant la fonction de moindres carrés :
![L = \frac{1}{2} \ \sum_{i=1}^{n}{a_i \left| \bold b_i - [C] \bold r_i \right|^2}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation15.png)
![\bold x_k = [A]_k \ \bold x_{k-1} + [B]_k \ \bold u_{k-1} + \bold w_{k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation16.png)
![\bold z_k = [H]_k \ \bold x_k + \bold v_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation17.png)
 et
et  représentent respectivement les bruits de processus et de mesure. On les suppose indépendants, blancs et de distribution de probabilité normale.
représentent respectivement les bruits de processus et de mesure. On les suppose indépendants, blancs et de distribution de probabilité normale. ![[A]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation20.png) est la matrice qui relie l'état précédent k-1 à l'état actuel k,
est la matrice qui relie l'état précédent k-1 à l'état actuel k, ![[B]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation21.png) est la matrice qui relie l'entrée de commande
est la matrice qui relie l'entrée de commande  à l'état
à l'état  .
. ![[H]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation24.png) est la matrice reliant l'état
est la matrice reliant l'état  à sa mesure
à sa mesure  .
.
![\hat{\bold x}_{k|k-1} = [A]_k \ \hat{\bold x}_{k-1|k-1} + [B]_k \ \bold u_{k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation27.png)
![[P]_{k|k-1} = [A]_k \ [P]_{k-1|k-1} \ {[A]_k}^T + [Q]_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation28.png)
![[Q]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation29.png) est la matrice de covariance du bruit de processus
est la matrice de covariance du bruit de processus  ,
, ![[P]_{k|k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation31.png) est la matrice d'estimation a priori de la covariance de l'erreur.
est la matrice d'estimation a priori de la covariance de l'erreur.
![[K]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation32.png) , puis générer une estimation de l'état a posteriori en incorporant la mesure. Enfin, on obtient la matrice de covariance de l'erreur d'estimation a posteriori
, puis générer une estimation de l'état a posteriori en incorporant la mesure. Enfin, on obtient la matrice de covariance de l'erreur d'estimation a posteriori ![[P]_{k|k}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation33.png) .
.
![[K]_k = [P]_{k|k-1} {[H]_k}^T \ {[S]_k}^{-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation34.png)
![\hat{\bold x}_{k|k} = \hat{\bold x}_{k|k-1} + [K]_k \ \bold y_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation35.png)
![[P]_k = \left( [I] - [K]_k \ [H]_k \right) [P]_{k|k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation36.png)
![[I]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation37.png) est la matrice identité. Deux équations supplémentaires permettent d'obtenir l'innovation, ou résiduel,
est la matrice identité. Deux équations supplémentaires permettent d'obtenir l'innovation, ou résiduel,  , et la covariance de l'innovation
, et la covariance de l'innovation ![[S]_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation39.png) :
:
![\bold y_k = \bold z_k - [H]_k \ \hat{\bold x}_{k|k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation40.png)
![[S]_k = [H]_k \ [P]_{k|k-1} \ {[H]_k}^T + [R]_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation41.png)
![[R]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation42.png) du bruit de mesure est déterminée avant d'utiliser le filtre et peut être mise à jour par la suite. Il est plus compliqué de déterminer la matrice de covariance du bruit de processus
du bruit de mesure est déterminée avant d'utiliser le filtre et peut être mise à jour par la suite. Il est plus compliqué de déterminer la matrice de covariance du bruit de processus ![[Q]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation43.png) car nous ne pouvons généralement pas directement observer le processus à estimer. Afin d'améliorer les performances du filtre, il est habituel de régler ces deux paramètres.
car nous ne pouvons généralement pas directement observer le processus à estimer. Afin d'améliorer les performances du filtre, il est habituel de régler ces deux paramètres.


 une fonction du temps. Sa transformée de Laplace unilatérale
une fonction du temps. Sa transformée de Laplace unilatérale  est
définie par
est
définie par  où
où  est la variable complexe.
est la variable complexe.
 (Dirac)
(Dirac)









 où
où  et
et  sont respectivement l'entrée et la sortie et
sont respectivement l'entrée et la sortie et  et
et  sont des polynômes à coefficients réels en (d/dt). Si l'on considère que les conditions initiales sont nulles, on peut réécrire l'équation différentielle précédente pour obtenir la fonction de transfert H :
sont des polynômes à coefficients réels en (d/dt). Si l'on considère que les conditions initiales sont nulles, on peut réécrire l'équation différentielle précédente pour obtenir la fonction de transfert H :

 ).
).

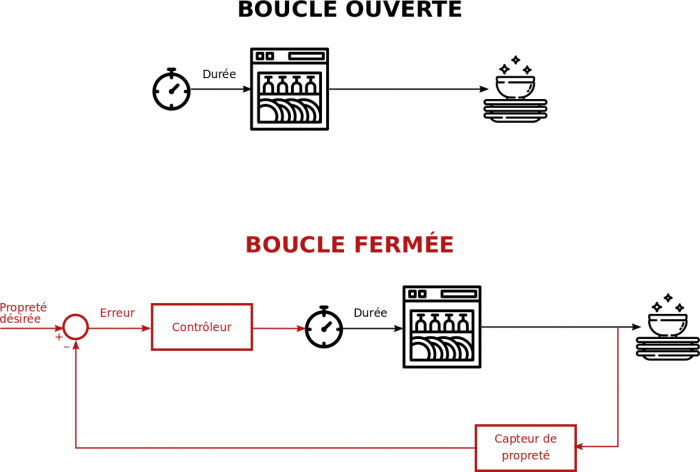
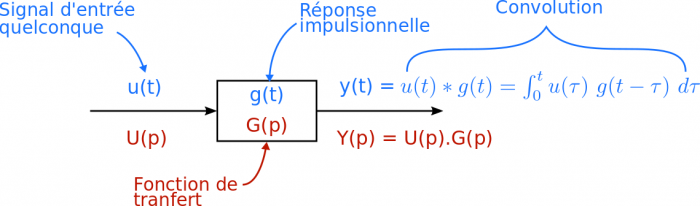
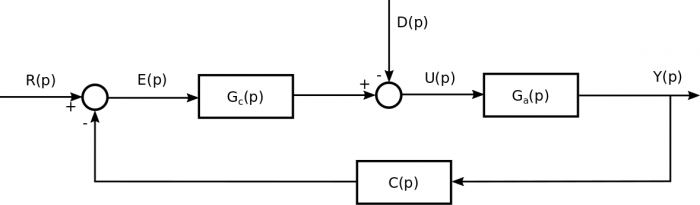




![[I] \ \ddot \theta (t) = u(t) + w(t)](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation30.png)
![[I]](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation31.png) est la matrice d'inertie,
est la matrice d'inertie,  est l'angle,
est l'angle,  est le couple de contrôle et
est le couple de contrôle et  est le couple perturbateur extérieur.
est le couple perturbateur extérieur.

 et
et  sont des gains qu'il faut déterminer. Le système en boucle fermée et son équation caractéristique s'écrivent alors :
sont des gains qu'il faut déterminer. Le système en boucle fermée et son équation caractéristique s'écrivent alors :
![[I] \ \ddot \theta (t) + [K_d] \ \dot \theta (t) + [K_p] \ \theta(t) = w(t) \ \leftrightarrow \ I \ p^2 + [K_d] \ p + [K_p] = 0](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation38.png)
 et
et  , respectivement la fréquence propre (fréquence de la réponse sinusoïdale du système non amorti) et le facteur d'amortissement. L'équation caractéristique est réécrite en introduisant ces deux nouvelles grandeurs :
, respectivement la fréquence propre (fréquence de la réponse sinusoïdale du système non amorti) et le facteur d'amortissement. L'équation caractéristique est réécrite en introduisant ces deux nouvelles grandeurs :

![[K_p] = [I] \ {\omega_n}^2](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation42.png) et
et ![[K_d] = 2 \ [I] \ \zeta \ \omega_n](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation43.png) . On choisit généralement le
. On choisit généralement le  . Il est important de noter que l'information sur la dérivée provient de
. Il est important de noter que l'information sur la dérivée provient de  . Idéalement nous souhaitons que l'attitude en régime permanent soit nulle, c'est la raison pour laquelle nous introduisons le contrôleur PID (proportionnel-intégral-dérivé) :
. Idéalement nous souhaitons que l'attitude en régime permanent soit nulle, c'est la raison pour laquelle nous introduisons le contrôleur PID (proportionnel-intégral-dérivé) :

![[I] \ p^3 + [K_d] \ p^2 + [K_p] \ p + [K_i] = 0 \ \leftrightarrow \ \left( p^2 + 2 \ \zeta \ \omega_n \ p + {\omega_n}^2 \right) \left( p + \frac{1}{T} \right) = 0](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation47.png)
 et
et  sont toujours la fréquence propre et le facteur d'amortissement, et
sont toujours la fréquence propre et le facteur d'amortissement, et  est la constante temporelle associée au contrôle intégral. Les gains du contrôleur PID s'expriment :
est la constante temporelle associée au contrôle intégral. Les gains du contrôleur PID s'expriment : ![[K_p] = [I] \left( {\omega_n}^2 + \frac{2 \ \zeta \ \omega_n}{T} \right)](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation51.png) ,
, ![[K_i] = [I] \ \frac{{\omega_n}^2}{T}](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation52.png) et
et ![[K_d] = [I] \left( 2 \ \zeta \ \omega_n + \frac{1}{T}\right)](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation53.png) . On choisit souvent la constante
. On choisit souvent la constante  telle que :
telle que :  .
.
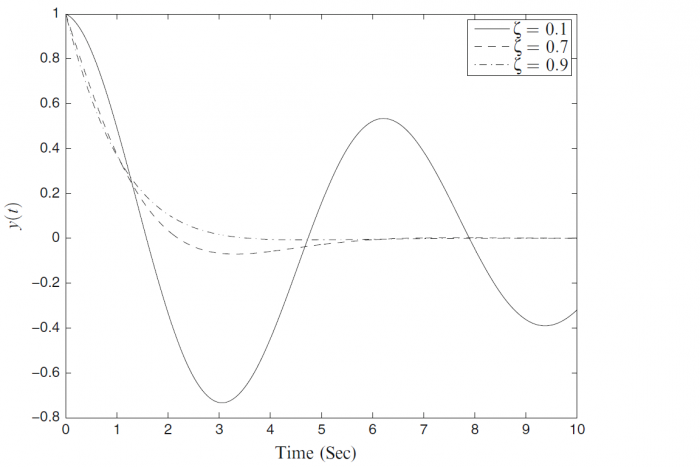
![[T] \ [T]^T = [I] = [T]^T \ [T]](../pages_nanosats/equations_nanosats-setester/equation1.png) .
.
![[T]_{B|A}](../pages_nanosats/equations_nanosats-setester/equation2.png) entre deux référentiels orthogonaux décrits par les vecteurs unitaires
entre deux référentiels orthogonaux décrits par les vecteurs unitaires  et
et  :
:
![\begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix} = [T]_{B|A} \ \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation5.png)
 .
.
 et conclure.
et conclure.
 ,
,  et
et  les trois angles d'Euler.
les trois angles d'Euler.
![[T(\theta_1)]_1 \leftarrow [T(\theta_2)]_2 \leftarrow [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-setester/equation15.png) afin de passer du référentiel
afin de passer du référentiel  au référentiel
au référentiel  , on obtient bien la formule présentée dans le
, on obtient bien la formule présentée dans le ![[T]_{B|A} = \begin{pmatrix} c_{\theta_2} c_{\theta_3} & c_{\theta_2} s_{\theta_3} & -s_{\theta_2} \\ s_{\theta_1} s_{\theta_2} c_{\theta_3} - c_{\theta_1} s_{\theta_3} & s_{\theta_1} s_{\theta_2} s_{\theta_3} + c_{\theta_1} c_{\theta_3} & s_{\theta_1} c_{\theta_2} \\ c_{\theta_1} s_{\theta_2} c_{\theta_3} +s_{\theta_1} s_{\theta_3} & c_{\theta_1} s_{\theta_2} s_{\theta_3} - s_{\theta_1} c_{\theta_3} & c_{\theta_1} c_{\theta_2} \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation18.png)
![\begin{cases} \begin{pmatrix} \bold a_1' \\ \bold a_2' \\ \bold a_3' \end{pmatrix} = [T(\theta_3)]_3 \ \begin{pmatrix} \bold a_1 \\ \bold a_2 \\ \bold a_3 \end{pmatrix} \\ \begin{pmatrix} \bold a_1'' \\ \bold a_2'' \\ \bold a_3'' \end{pmatrix} = [T(\theta_2)]_2 \ \begin{pmatrix} \bold a_1' \\ \bold a_2' \\ \bold a_3' \end{pmatrix} \\ \begin{pmatrix} \bold b_1 \\ \bold b_2 \\ \bold b_3 \end{pmatrix} = [T(\theta_1)]_1 \ \begin{pmatrix} \bold a_1'' \\ \bold a_2'' \\ \bold a_3'' \end{pmatrix} \end{cases}](../pages_nanosats/equations_nanosats-setester/equation19.png)
![[T(\theta_1)]_1 \leftarrow [T(\theta_3)]_3 \leftarrow [T(\theta_2)]_2](../pages_nanosats/equations_nanosats-setester/equation20.png) . Exprimer la MCD associée à cette séquence.
. Exprimer la MCD associée à cette séquence.
 au référentiel
au référentiel  :
:
![[T(\theta_1)]_1 \leftarrow [T(\theta_2)]_2 \leftarrow [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-setester/equation24.png)
![[T(\theta_1)]_1 = \begin{pmatrix} sin(\theta_1 / 2) \\ 0 \\ 0 \\ cos(\theta_1 / 2) \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation25.png) ,
, ![[T(\theta_1)]_1 = \begin{pmatrix} 0 \\ sin(\theta_2 / 2) \\ 0 \\ cos(\theta_2 / 2) \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation26.png) ,
, ![[T(\theta_1)]_1 = \begin{pmatrix} 0 \\ 0 \\ sin(\theta_3 / 2) \\ cos(\theta_3 / 2) \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation27.png)
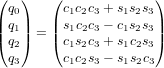
 et
et 
![\frac{d}{dt}([T]) = -[\Omega] \ [T]](../pages_nanosats/equations_nanosats-setester/equation32.png) avec
avec ![[\Omega] = \begin{pmatrix} 0 & -\omega_z & \omega_y \\ \omega_z & 0 & -\omega_x \\ -\omega_y & \omega_x & 0 \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation33.png) et
et ![[T] = \begin{pmatrix} T_{11} & T_{12} & T_{13} \\ T_{21} & T_{22} & T_{23} \\ T_{31} & T_{32} & T_{33} \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation34.png)
![[T]](../pages_nanosats/equations_nanosats-setester/equation35.png) entre deux référentiels orthogonaux décrits par les vecteurs unitaires
entre deux référentiels orthogonaux décrits par les vecteurs unitaires  et
et  .
.
![[T]](../pages_nanosats/equations_nanosats-setester/equation38.png) .
.
 au vecteur
au vecteur  .
.
![\begin{pmatrix} \bold a_1 \\ \bold a_2 \\ \bold a_3 \end{pmatrix} = [T]^T \begin{pmatrix} \bold b_1 \\ \bold b_2 \\ \bold b_3 \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation42.png)
 par rapport à
par rapport à 
 et l'insérer dans l'équation précédente.
et l'insérer dans l'équation précédente.
![\begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} = \dot {[T]}^T \ \begin{pmatrix} \bold b_1 \\ \bold b_2 \\ \bold b_3 \end{pmatrix} + [T]^T \ \begin{pmatrix} \boldsymbol\omega \wedge \bold b_1 \\ \boldsymbol\omega \wedge \bold b_2 \\ \boldsymbol\omega \wedge \bold b_3 \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation47.png)
![[\Omega] = \begin{pmatrix} 0 & -\omega_3 & \omega_2 \\ \omega_3 & 0 & -\omega_1 \\ -\omega_2 & \omega_1 & 0 \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation48.png)
![[T(\theta_1)]_1 \leftarrow [T(\theta_2)]_2 \leftarrow [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-setester/equation52.png) .
.
 en fonction des vecteurs de vitesse angulaire précédents.
en fonction des vecteurs de vitesse angulaire précédents.
 et
et  en fonction de ceux de (B).
en fonction de ceux de (B).

![[T(\theta_1)]_1 \leftarrow [T(\theta_3)]_3 \leftarrow [T(\theta_2)]_2](../pages_nanosats/equations_nanosats-setester/equation62.png) . Exprimer alors l'équation de la cinématique.
. Exprimer alors l'équation de la cinématique.
![[T] = [T(\bold q)] = \begin{pmatrix} 1-2(q_2^2+q_3^2) & 2(q_1q_2+q_3q_0) & 2(q_1 q_3 - q_2 q_0) \\ 2(q_2q_1-q_3q_0) & 1-2(q_1^2+q_3^2) & 2(q_2q_3+q_1q_0) \\ 2(q_3q_1+q_2q_0) & 2(q_3q_2-q_1q_0) & 1-2(q_1^2+q_2^2) \end{pmatrix}](../pages_nanosats/equations_nanosats-setester/equation65.png)











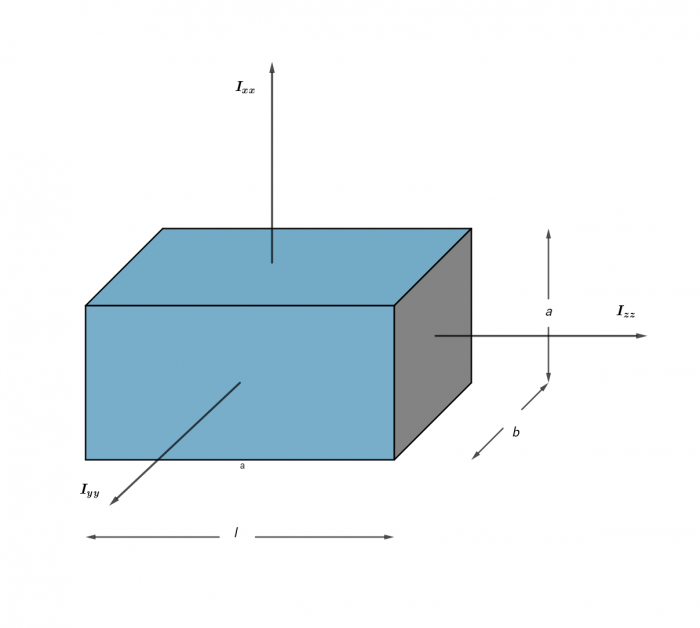



 .
.
![\bold C_{GG} = \frac{3 \ \mu}{r^3} \bold r \wedge \left([I] \bold r \right)](../pages_nanosats/equations_nanosats-setester/equation94.png)
 .
. avec
avec  et
et  .
.

 N.m.
N.m.
 et
et  , où N est le nombre de spire de la bobine.
, où N est le nombre de spire de la bobine.
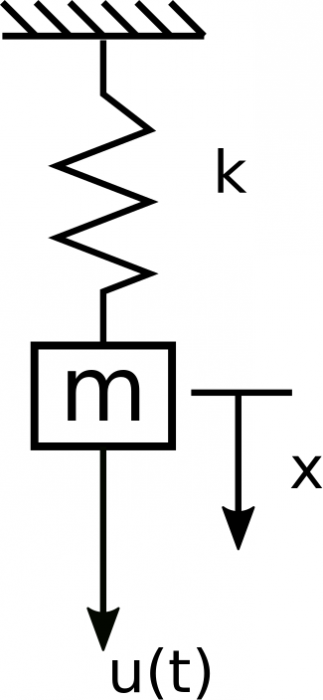
 . Afin d'obtenir la réponse dans le domaine temporel, il faudrait faire le produit de convolution de cette rampe avec la réponse impulsionnelle :
. Afin d'obtenir la réponse dans le domaine temporel, il faudrait faire le produit de convolution de cette rampe avec la réponse impulsionnelle :


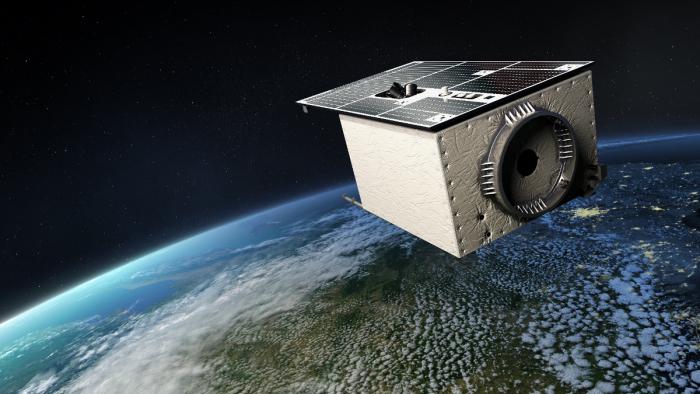
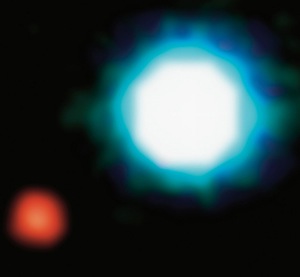
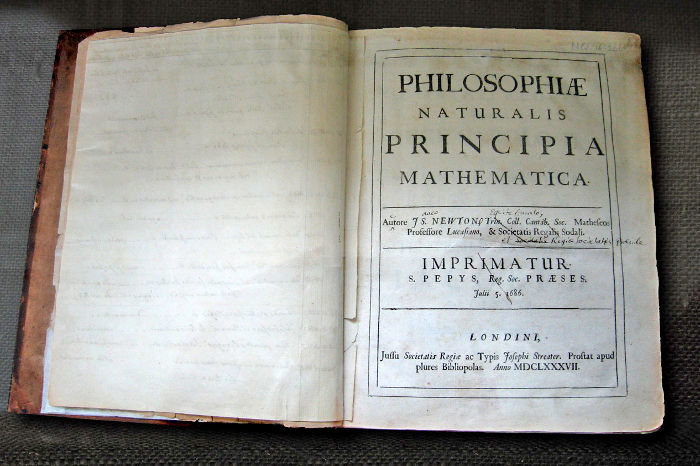

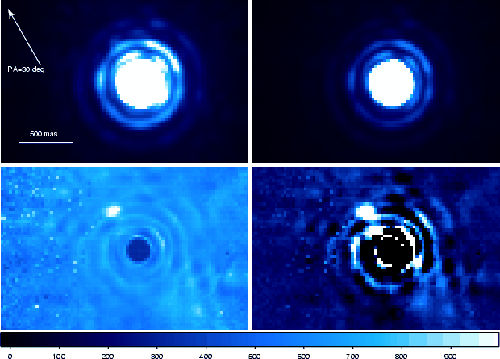

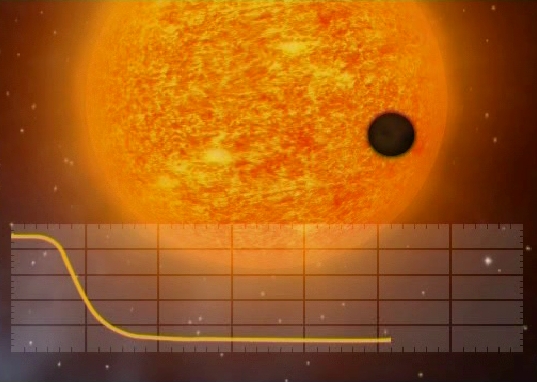

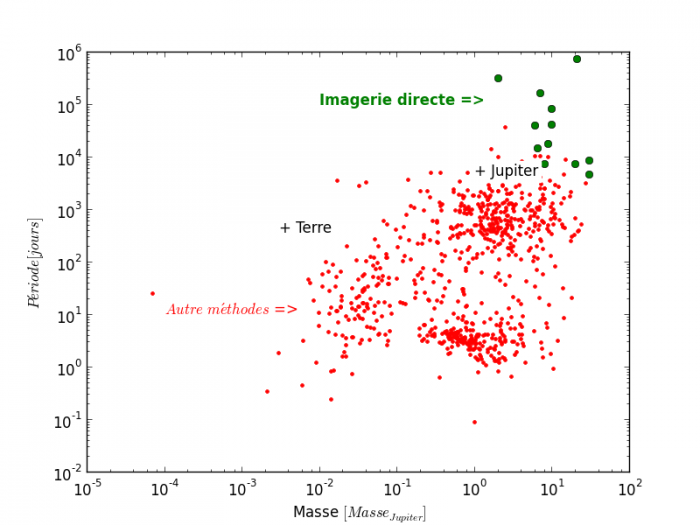

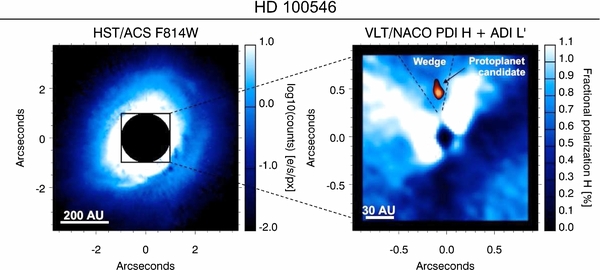
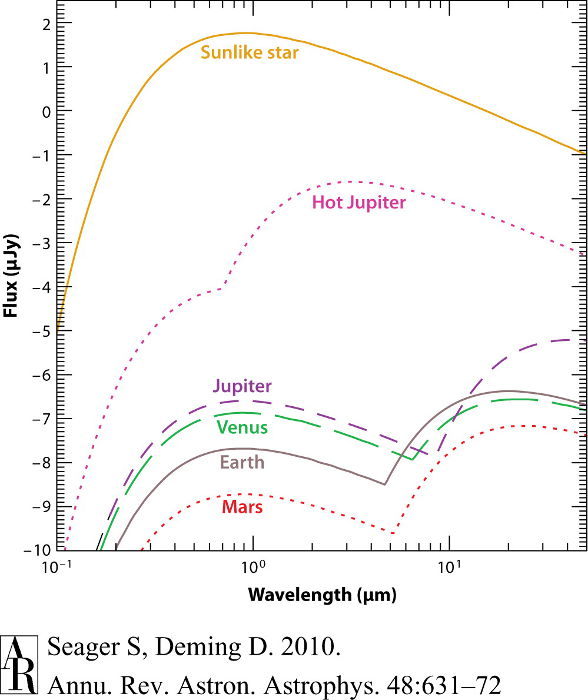
 !
!
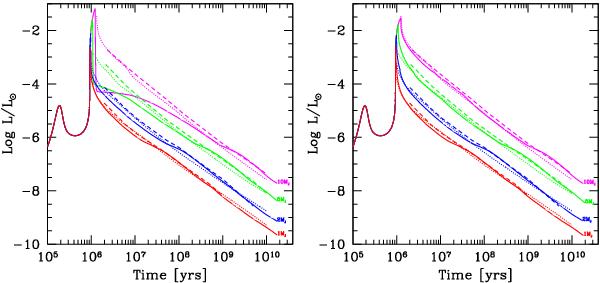
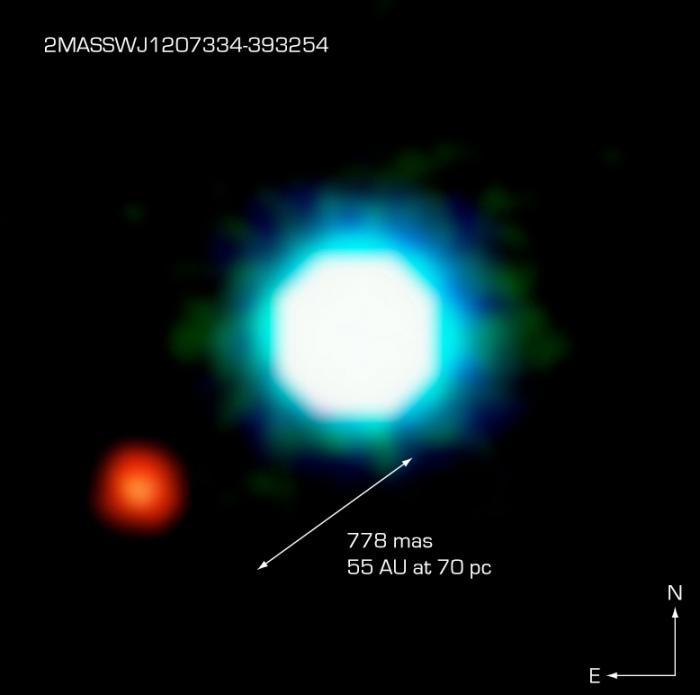




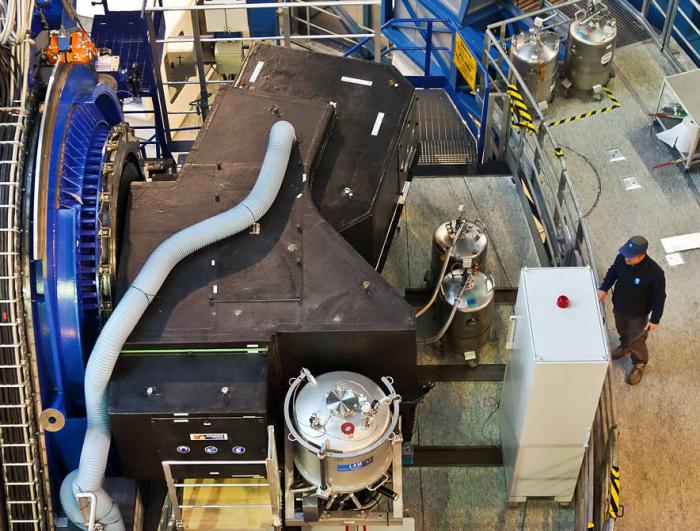
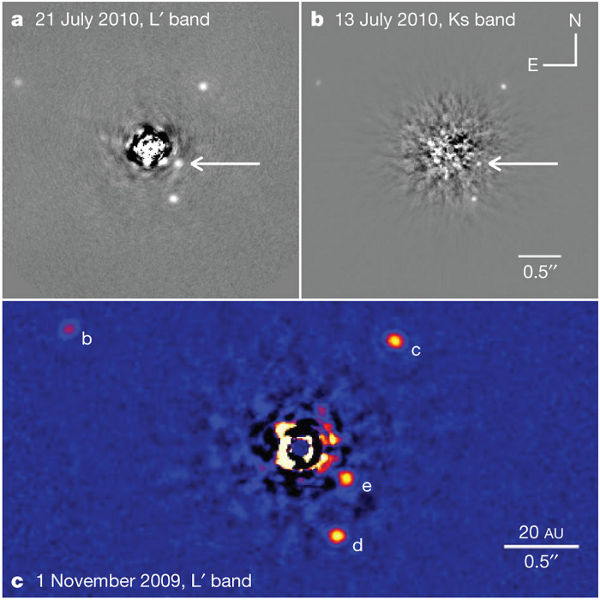
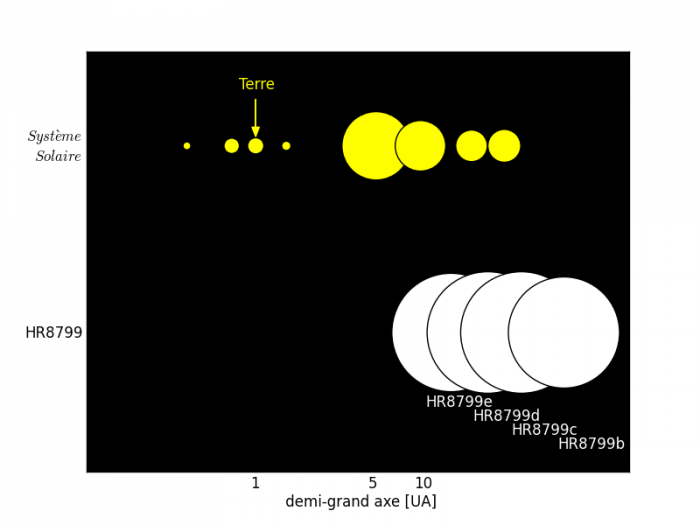
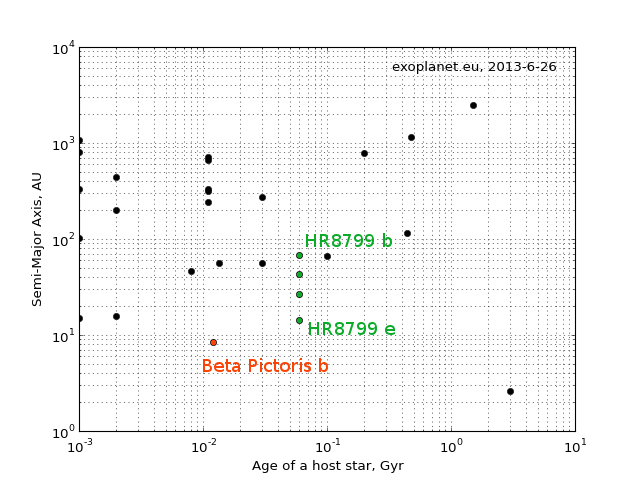

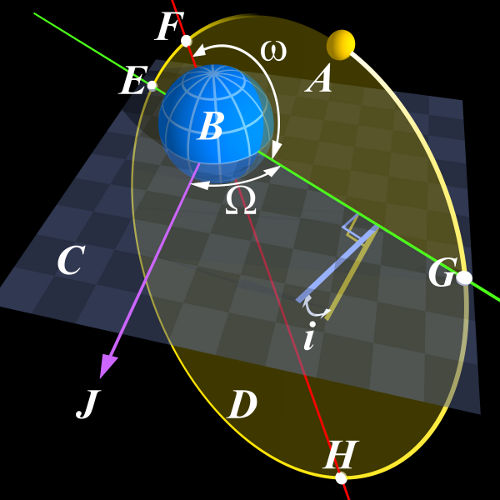
 (1
(1  correspondant à une fois la masse Terre) , l'accrétion de gaz augmente brutalement pour former une planète géante.
correspondant à une fois la masse Terre) , l'accrétion de gaz augmente brutalement pour former une planète géante.
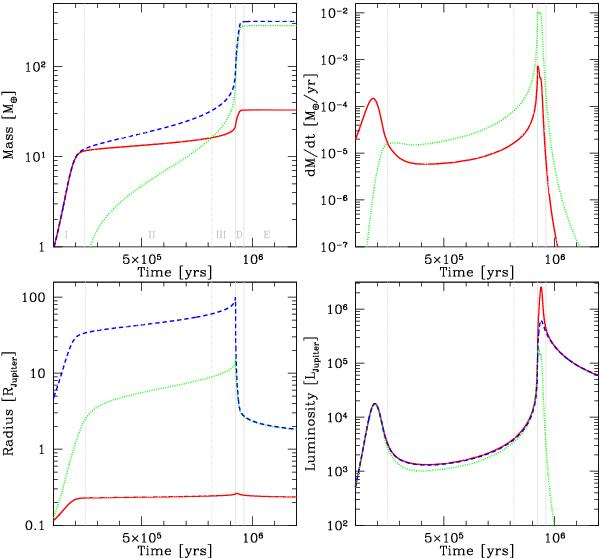
 et que le disque s'étend de 5 à plusieurs centaines d'UA.
Il existe des étoiles autour desquelles on trouve un disque plus de 1200 fois plus brillant, comme η Corvi !
et que le disque s'étend de 5 à plusieurs centaines d'UA.
Il existe des étoiles autour desquelles on trouve un disque plus de 1200 fois plus brillant, comme η Corvi !

 . La longueur d'onde
. La longueur d'onde  où ce spectre atteint son maximum est donnée par la loi de Wien:
où ce spectre atteint son maximum est donnée par la loi de Wien:  .
.  ,
,  et
et  désignent respectivement les constantes de Planck, la vitesse de la lumière et la constante de Boltzmann. Un corps chaud présente donc un pic d'émission décalé vers les courtes longueurs d'onde par rapport à un corps plus froid. Aux températures ambiantes, ce pic est dans l'infrarouge (dit infrarouge thermique), mais pour des corps atteignant une température plusieurs milliers de Kelvins, ce maximum se décale dans le spectre visible : c'est le cas des étoiles par exemple, ou bien d'un tison chauffé à blanc.
désignent respectivement les constantes de Planck, la vitesse de la lumière et la constante de Boltzmann. Un corps chaud présente donc un pic d'émission décalé vers les courtes longueurs d'onde par rapport à un corps plus froid. Aux températures ambiantes, ce pic est dans l'infrarouge (dit infrarouge thermique), mais pour des corps atteignant une température plusieurs milliers de Kelvins, ce maximum se décale dans le spectre visible : c'est le cas des étoiles par exemple, ou bien d'un tison chauffé à blanc.
 (intégré sur toutes les longueurs d'onde) émis par un corps noir ne dépend également que de sa température, suivant la loi de Stefan-Boltzmann :
(intégré sur toutes les longueurs d'onde) émis par un corps noir ne dépend également que de sa température, suivant la loi de Stefan-Boltzmann :  où
où  désigne la constante de Stefan-Boltzmann. Un corps chaud rayonne donc bien davantage qu'un corps froid.
désigne la constante de Stefan-Boltzmann. Un corps chaud rayonne donc bien davantage qu'un corps froid.
 ) de la planète. Elle est en règle générale voisine de la température physique de la région de la planète d'où est principalement issue l'émission thermique (atmosphère, voire surface solide pour des planètes telluriques dotées d'une atmosphère mince).
) de la planète. Elle est en règle générale voisine de la température physique de la région de la planète d'où est principalement issue l'émission thermique (atmosphère, voire surface solide pour des planètes telluriques dotées d'une atmosphère mince).
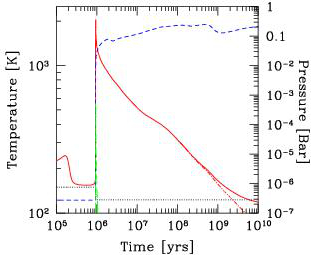
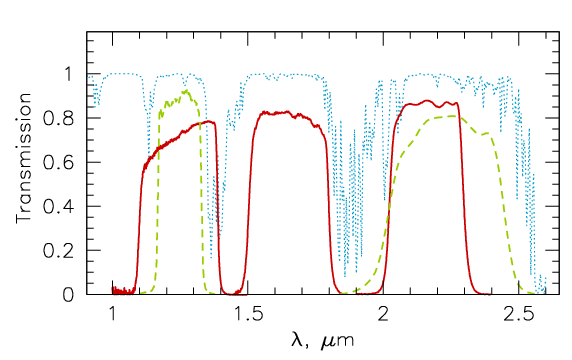
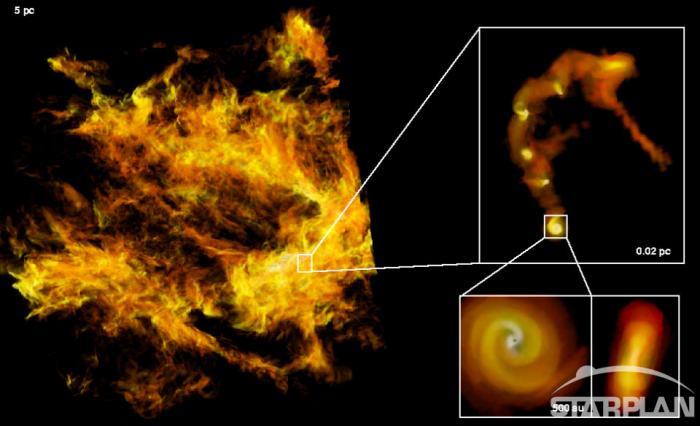
 : plus il est élevé, plus l'activité est grande. Les courbes représentes plusieurs tentatives pour déterminer une relation entre ces deux observables.
: plus il est élevé, plus l'activité est grande. Les courbes représentes plusieurs tentatives pour déterminer une relation entre ces deux observables.
 et le rayonnement en X .
B-V est l'indice de couleur des étoiles qui peut donc être relié à leur type spectral.
et le rayonnement en X .
B-V est l'indice de couleur des étoiles qui peut donc être relié à leur type spectral.
 et la rotation de l'étoile exprimée par le
et la rotation de l'étoile exprimée par le  (voir la partie mécanique) et de la distance séparant le système exoplanétaire de l'observateur terrestre
(voir la partie mécanique) et de la distance séparant le système exoplanétaire de l'observateur terrestre  .
Or, si l'on prend un cas typique d'un planète à 100 UA autour d'un étoile située à 10 pc de nous, le rapport
.
Or, si l'on prend un cas typique d'un planète à 100 UA autour d'un étoile située à 10 pc de nous, le rapport  vaut plus de cent mille ! La séparation angulaire
vaut plus de cent mille ! La séparation angulaire  entre l'étoile et l'exoplanète vues depuis la Terre est alors donnée simplement par la formule trigonométrique
entre l'étoile et l'exoplanète vues depuis la Terre est alors donnée simplement par la formule trigonométrique  . Comme
. Comme  , cette formule se simplifie en
, cette formule se simplifie en  si l'on mesure
si l'on mesure  en radians (il faudra alors le convertir en secondes d'arc :
en radians (il faudra alors le convertir en secondes d'arc :  ).
).
 entre l'étoile et la planète grâce au contraste, définit comme :
entre l'étoile et la planète grâce au contraste, définit comme :
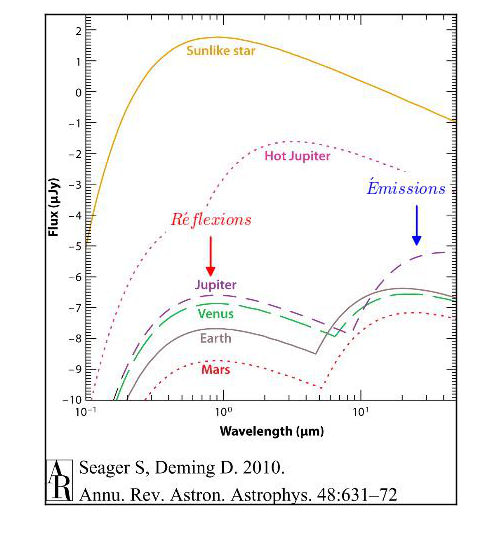
 est liée au flux spectral émis ou réfléchi
est liée au flux spectral émis ou réfléchi  par la formule
par la formule 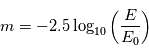 où
où  est le flux spectral d'une étoile de référence (par défaut Véga) qui correspond arbitrairement à une magnitude de 0.
est le flux spectral d'une étoile de référence (par défaut Véga) qui correspond arbitrairement à une magnitude de 0.
 (minuscule) avec indication optionnelle d'une bande spectrale (ainsi un objet observé dans un filtre V, correspondant à la bande "visible" autour de 551 nm, verra sa magnitude apparente notée
(minuscule) avec indication optionnelle d'une bande spectrale (ainsi un objet observé dans un filtre V, correspondant à la bande "visible" autour de 551 nm, verra sa magnitude apparente notée  ou même
ou même  )
) (majuscule) :
(majuscule) :  avec
avec  la distance séparant l'observateur de l'objet en parsec et
la distance séparant l'observateur de l'objet en parsec et  un facteur de correction provenant de l'absorption par le milieu interstellaire, négligeable sur les courtes distances. Si on consiodère la même bande spectrale que dans l'exemple précédent, la magnitude absolue sera notée
un facteur de correction provenant de l'absorption par le milieu interstellaire, négligeable sur les courtes distances. Si on consiodère la même bande spectrale que dans l'exemple précédent, la magnitude absolue sera notée  .
.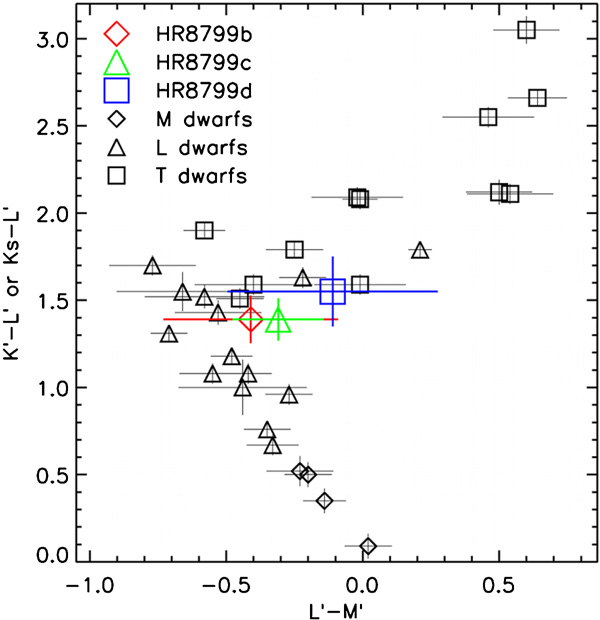

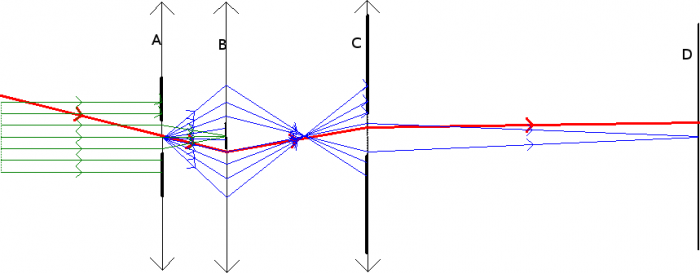
 de l'étoile avant l'entrée dans l'instrument de diamètre
de l'étoile avant l'entrée dans l'instrument de diamètre  et sa phase
et sa phase  , alors la phase du rayon provenant de la position
, alors la phase du rayon provenant de la position  sur le plan A, vu à la position angulaire
sur le plan A, vu à la position angulaire  au niveau du plan B est donnée par
au niveau du plan B est donnée par  dans l'approximations de Gauss (petits angles hors-axe).
dans l'approximations de Gauss (petits angles hors-axe).
 ou, en omettant le facteur de normalisation :
ou, en omettant le facteur de normalisation :  . L'amplitude de lumière reçue dans l'instrument, venant de l'étoile, est donc dépendante du diamètre
. L'amplitude de lumière reçue dans l'instrument, venant de l'étoile, est donc dépendante du diamètre  de l'instrument et de la longueur d'onde d'observation
de l'instrument et de la longueur d'onde d'observation  .
.
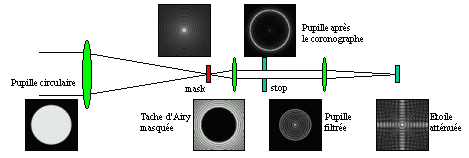
 où
où  est la fonction de transmission du masque placé en B. Dans le cadre d'un coronographe,
est la fonction de transmission du masque placé en B. Dans le cadre d'un coronographe,  . L'amplitude au niveau du plan C va être donc être atténuée par rapport à celle au niveau du plan B, ce rapport dépendant de celui entre la taille angulaire du masque
. L'amplitude au niveau du plan C va être donc être atténuée par rapport à celle au niveau du plan B, ce rapport dépendant de celui entre la taille angulaire du masque  et l'ouverture
et l'ouverture  de l'instrument.
de l'instrument.
 où
où  est la fonction du transmission du Lyot-Stop, un diaphragme dont on considérera la fonction de tranmission également rectangulaire :
est la fonction du transmission du Lyot-Stop, un diaphragme dont on considérera la fonction de tranmission également rectangulaire :  .
.
 : plus le masque sera grand et le Lyot-Stop fermé, plus la lumière de l'étoile sera "éteinte" et donc plus facilement la planète sera visible. Attention toutefois, la lumière provenant d'une éventuelle planète doit quant à elle être transmise ! Il faut donc trouver un compromis entre la diminution d'intensité de la lumière de l'étoile et la conservation de l'intensité en provenance d'une éventuelle planète, dont on ne connaît pas a priori la séparation angulaire avec l'étoile...
: plus le masque sera grand et le Lyot-Stop fermé, plus la lumière de l'étoile sera "éteinte" et donc plus facilement la planète sera visible. Attention toutefois, la lumière provenant d'une éventuelle planète doit quant à elle être transmise ! Il faut donc trouver un compromis entre la diminution d'intensité de la lumière de l'étoile et la conservation de l'intensité en provenance d'une éventuelle planète, dont on ne connaît pas a priori la séparation angulaire avec l'étoile...
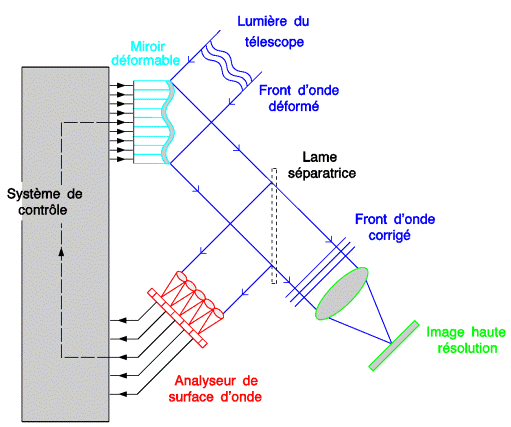
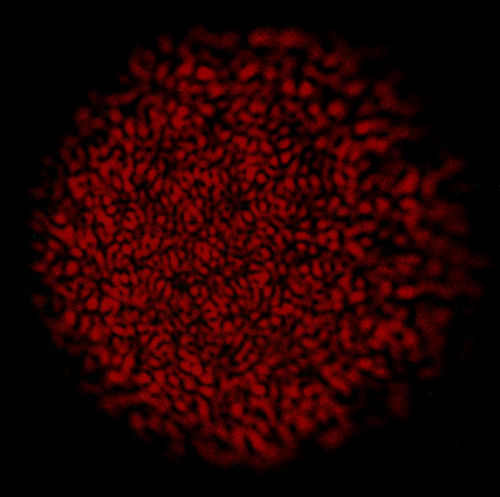
 de l'instrument, l'interférométrie permet de passer d'une résolution proportionnelle à
de l'instrument, l'interférométrie permet de passer d'une résolution proportionnelle à  à un résolution proportionnelle à
à un résolution proportionnelle à  où
où  est la ligne de base d'interférométrie (dans le cas de deux télescopes, il s'agit de la distance entre ces deux télescopes). Ces télescopes éloignés sont reliés entre eux par un chemin optique conçu de telle sorte que les interférences produites par la lumière arrivant dans l'axe des télescopes (la lumière de l'étoile) conduisent à une annulation des deux ondes en provenance des deux télescopes. On obtient donc sur le récepteur une figure de franges d'interférences centrées sur l'étoile au coeur d'une frange sombre. Mais la planète, elle, est située hors-axe : elle apparaît donc légèrement décalée et, si la figure d'interférences est correctement mis en place, échappe non seulement aux interférences destructives mais profite même d'interférences constructives pour augmenter le signal.
est la ligne de base d'interférométrie (dans le cas de deux télescopes, il s'agit de la distance entre ces deux télescopes). Ces télescopes éloignés sont reliés entre eux par un chemin optique conçu de telle sorte que les interférences produites par la lumière arrivant dans l'axe des télescopes (la lumière de l'étoile) conduisent à une annulation des deux ondes en provenance des deux télescopes. On obtient donc sur le récepteur une figure de franges d'interférences centrées sur l'étoile au coeur d'une frange sombre. Mais la planète, elle, est située hors-axe : elle apparaît donc légèrement décalée et, si la figure d'interférences est correctement mis en place, échappe non seulement aux interférences destructives mais profite même d'interférences constructives pour augmenter le signal.
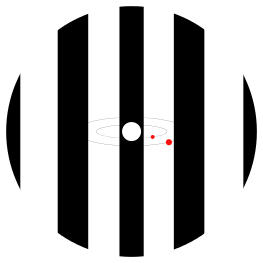
 . Il faut donc augmenter la taille du télescope, ou combiner le flux de plusieurs télescopes comme nous le présentons ici. On peut alors aisément obtenir une ligne de base de 100 m en séparant 2 télescopes de cette distance.
. Il faut donc augmenter la taille du télescope, ou combiner le flux de plusieurs télescopes comme nous le présentons ici. On peut alors aisément obtenir une ligne de base de 100 m en séparant 2 télescopes de cette distance.
 où
où  désigne l'écart sur le ciel entre la planète et l'étoile (donc dans une direction normale à l'axe optique), et
désigne l'écart sur le ciel entre la planète et l'étoile (donc dans une direction normale à l'axe optique), et  est la séparation entre la planète et l'étoile dans la direction de l'axe optique.
est la séparation entre la planète et l'étoile dans la direction de l'axe optique.
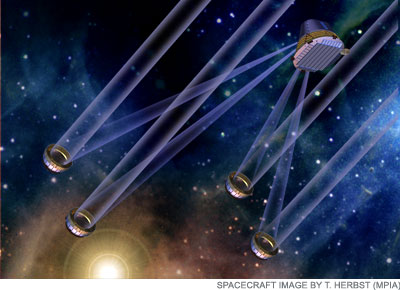




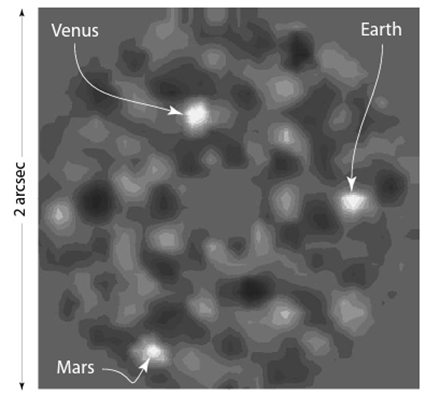


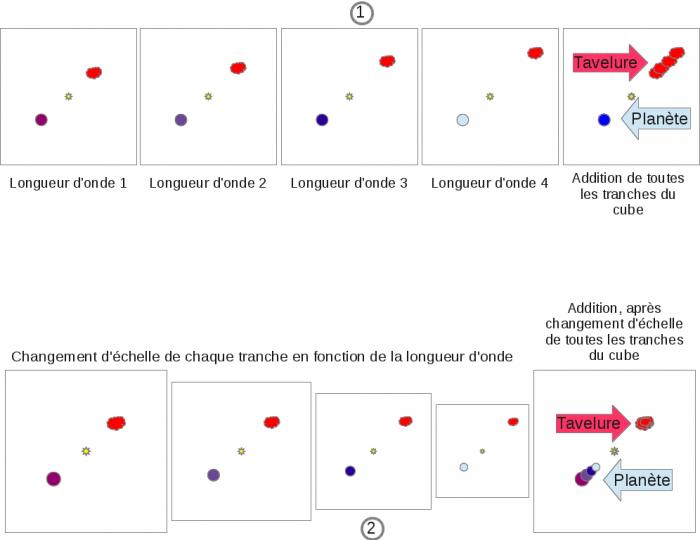
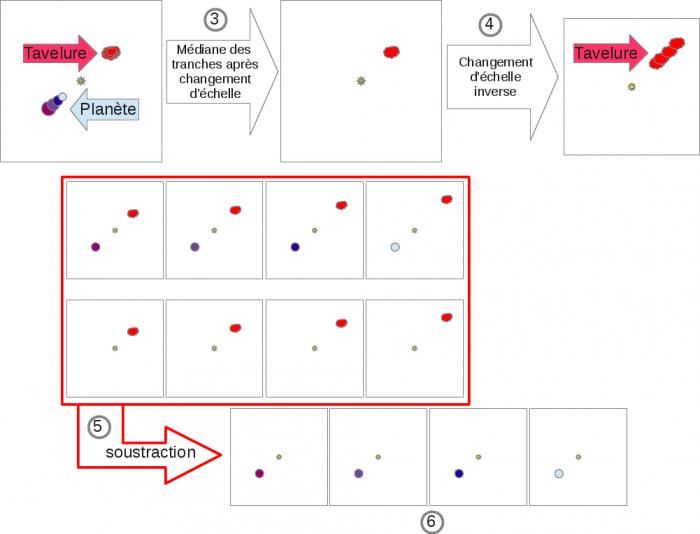
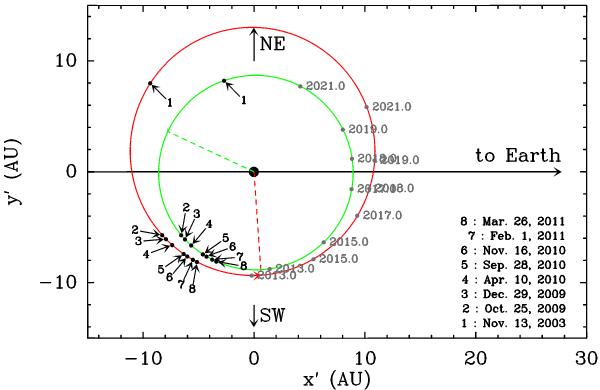
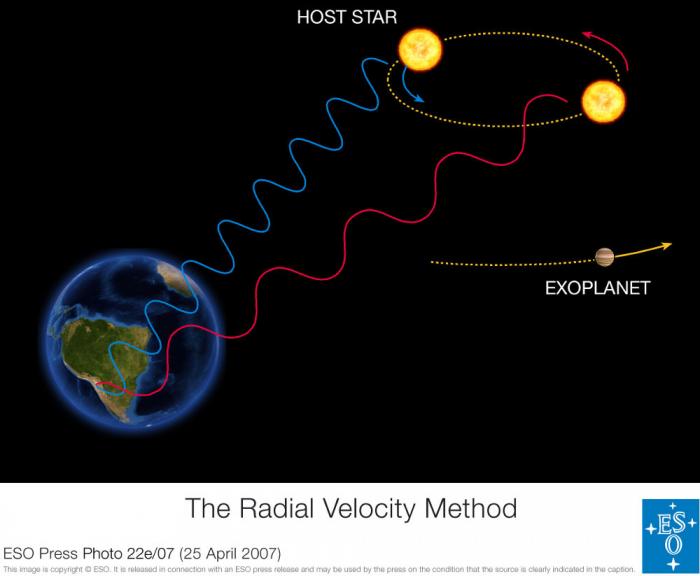
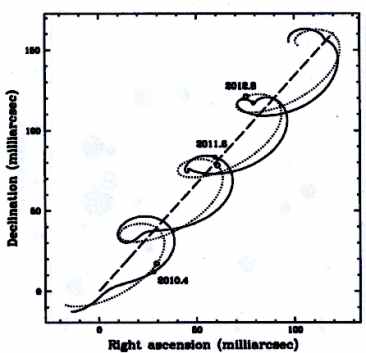





















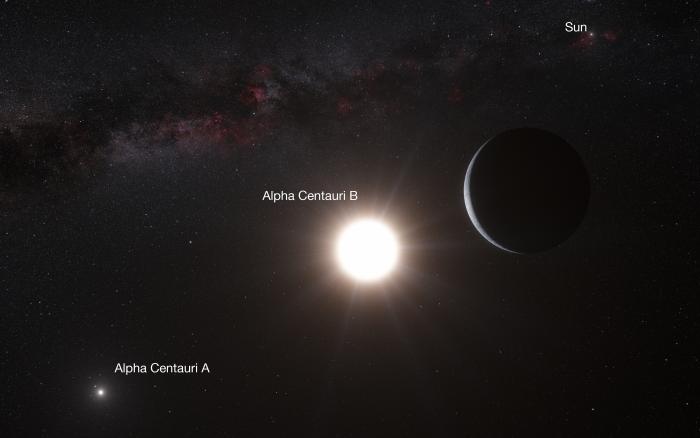




 soit
soit 

 soit environ
soit environ 

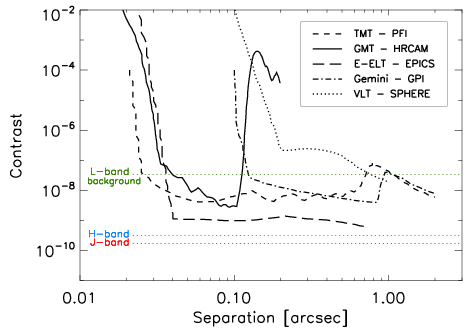
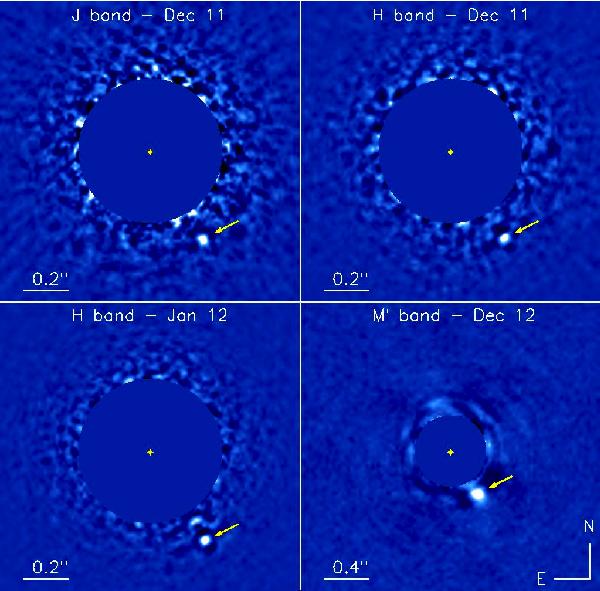





























 (intensité par longueur d'onde
(intensité par longueur d'onde  . Si maintenant la source et l'observateur ont une vitesse relative
. Si maintenant la source et l'observateur ont une vitesse relative  au temps
au temps  , l'observateur verra un spectre décalé
, l'observateur verra un spectre décalé  avec
avec  où
où  est la vitesse de la lumière, dans l'hypothèse où
est la vitesse de la lumière, dans l'hypothèse où  est très petit par rapport à
est très petit par rapport à  . En mesurant
. En mesurant  on peut remonter à
on peut remonter à  . La présence d'une planète autour d'une étoile engendre un mouvement périodique de celle-ci, donc un décalage périodique du spectre (voir figure 2).
. La présence d'une planète autour d'une étoile engendre un mouvement périodique de celle-ci, donc un décalage périodique du spectre (voir figure 2).
 l'angle entre la ligne de visée et le plan orbital d'un objet de masse
l'angle entre la ligne de visée et le plan orbital d'un objet de masse  , on mesure
, on mesure 
 .
.
 ) en orbite autour d'une étoile de type solaire. Etant
donné que la limite admise à la masse d'une planète (au delà de laquelle le deutérium entre en fusion) est de 13
) en orbite autour d'une étoile de type solaire. Etant
donné que la limite admise à la masse d'une planète (au delà de laquelle le deutérium entre en fusion) est de 13  , la conclusion de l'article est encore valide: il est possible que ce compagnon soit une Naine brune ou une super Jupiter, selon la valeur de
, la conclusion de l'article est encore valide: il est possible que ce compagnon soit une Naine brune ou une super Jupiter, selon la valeur de  . La première planète confirmée comme telle est découverte en 1995 par Michel Mayor et Didier Queloz à l'observatoire de Haute Provence.
. La première planète confirmée comme telle est découverte en 1995 par Michel Mayor et Didier Queloz à l'observatoire de Haute Provence.
 . La précision attendue doit être maintenue sur plusieurs mois, voire plusieurs années.
. La précision attendue doit être maintenue sur plusieurs mois, voire plusieurs années.

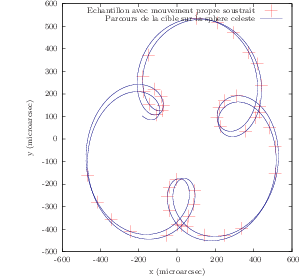
 (ou centre de gravité). Si une seule planète de masse
(ou centre de gravité). Si une seule planète de masse  orbite autour d'une étoile de masse
orbite autour d'une étoile de masse  à une distance
à une distance  de
de  que vaut la distance de l'étoile à
que vaut la distance de l'étoile à  , notée
, notée  ? Que pensez vous de l'affirmation: "à orbite fixée, plus une planète est massive plus elle est facile à détecter" ?
? Que pensez vous de l'affirmation: "à orbite fixée, plus une planète est massive plus elle est facile à détecter" ?
 est en radian
est en radian  , le jongleur doit se trouver à
, le jongleur doit se trouver à  m = 19 UA, soit environ la distance Terre-Uranus.
m = 19 UA, soit environ la distance Terre-Uranus. 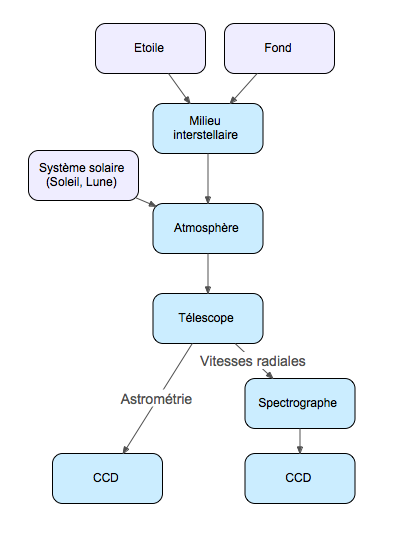
 et un bruit
et un bruit  forment une mesure
forment une mesure  , le rapport signal sur bruit est
, le rapport signal sur bruit est  . Plus ce rapport est grand, plus la mesure est précise.
. Plus ce rapport est grand, plus la mesure est précise.
 et
et  ) d'une étoile de type solaire à 10 parsec autour de laquelle une planète de type jupiter orbite. On a
) d'une étoile de type solaire à 10 parsec autour de laquelle une planète de type jupiter orbite. On a  et
et  Les mesures sont contaminées par des variations aléatoires d'amplitudes
Les mesures sont contaminées par des variations aléatoires d'amplitudes  as (précision de la mission Gaia, mission astrométrique la plus précise) et
as (précision de la mission Gaia, mission astrométrique la plus précise) et  m/s (ordre de grandeur pour les meilleurs spectrographes actuels) . Le rapport signal sur bruit est de l'ordre de
m/s (ordre de grandeur pour les meilleurs spectrographes actuels) . Le rapport signal sur bruit est de l'ordre de  et
et  . La technique par vitesse radiale est pour l'instant plus précise.
. La technique par vitesse radiale est pour l'instant plus précise.
 à partir d'une mesure
à partir d'une mesure  , mais un vecteur de paramètre
, mais un vecteur de paramètre  à partir de plusieurs mesures aux instants
à partir de plusieurs mesures aux instants  , et les mesures dépendent de ces paramètres et des instants d'observations par une fonction
, et les mesures dépendent de ces paramètres et des instants d'observations par une fonction  : on a
: on a  , où
, où  est une variable aléatoire suivant une certaine loi de probabilité qui modélise l'incertitude. Le problème direct est la construction de la fonction
est une variable aléatoire suivant une certaine loi de probabilité qui modélise l'incertitude. Le problème direct est la construction de la fonction  . En l'occurrence, on utilise les équations bien connues de la mécanique céleste. "Si des planètes avec des paramètres orbitaux connus orbitent autour d'une étoile de masse connue observée à des instants connus, alors les observations seront
. En l'occurrence, on utilise les équations bien connues de la mécanique céleste. "Si des planètes avec des paramètres orbitaux connus orbitent autour d'une étoile de masse connue observée à des instants connus, alors les observations seront  ".Une première approche est présentée dans la section 1 de la partie "comprendre"
".Une première approche est présentée dans la section 1 de la partie "comprendre" aux instants
aux instants  ,
,  =1..
=1.. et un modèle
et un modèle  (éventuellement un bruit
(éventuellement un bruit  ? C'est le problème de la réduction des données expérimentales, qui est l'objet de la section 3 de la partie "comprendre".
? C'est le problème de la réduction des données expérimentales, qui est l'objet de la section 3 de la partie "comprendre". de la page précédente prend en général en compte plusieurs effets présentés ici. Compte tenu du format du cours, seuls certains d'entre eux seront développés dans la suite.
de la page précédente prend en général en compte plusieurs effets présentés ici. Compte tenu du format du cours, seuls certains d'entre eux seront développés dans la suite.
 photons sur un certain intervalle de temps
photons sur un certain intervalle de temps  , le nombre de détections pendant
, le nombre de détections pendant  sera une variable aléatoire de moyenne
sera une variable aléatoire de moyenne  et de variance
et de variance  . Cette notion est expliquée plus en détail page
. Cette notion est expliquée plus en détail page  , on observe le flux lumineux
, on observe le flux lumineux  provenant de toute la partie visible de l'étoile. D'un point de vue mathématique,
provenant de toute la partie visible de l'étoile. D'un point de vue mathématique,  est intégré sur toute le disque visible de la photosphère de l'étoile:
est intégré sur toute le disque visible de la photosphère de l'étoile:  . Au rayon
. Au rayon  et à l'angle
et à l'angle  ,
,  dépend de la température, de la composition et de la vitesse de la matière par rapport à l'observateur en
dépend de la température, de la composition et de la vitesse de la matière par rapport à l'observateur en  .
.  est un facteur variant selon les modèles dits de "limb darkening". On peut modéliser des propriétés des variations du flux à une longueur d'onde donnée avec un modèle physique de l'étoile.
En pratique, on prend en compte trois types d'effets en compte:
est un facteur variant selon les modèles dits de "limb darkening". On peut modéliser des propriétés des variations du flux à une longueur d'onde donnée avec un modèle physique de l'étoile.
En pratique, on prend en compte trois types d'effets en compte: 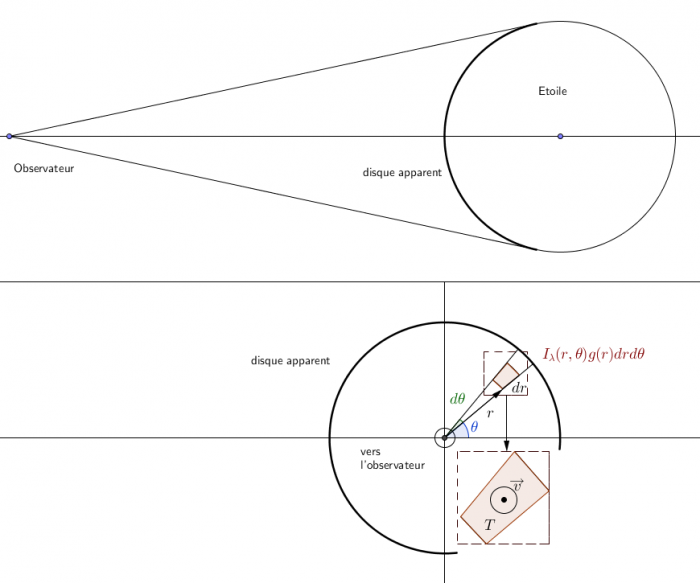
 et de la vitesse
et de la vitesse  en chaque point du disque apparent de l'étoile
en chaque point du disque apparent de l'étoile

 peut être vue comme un programme informatique donnant une valeur réelle à chaque fois qu'on lui demande. La valeur retournée dépendra de la distribution de probabilité de cette variable aléatoire, notée
peut être vue comme un programme informatique donnant une valeur réelle à chaque fois qu'on lui demande. La valeur retournée dépendra de la distribution de probabilité de cette variable aléatoire, notée  . Par exemple, si on veut modéliser le lancer d'une pièce de monnaie, chaque lancé correspond à une requête au programme qui retournera "face" ou "pile" avec une probabilité 1/2. Dans le cas de distributions continues,
. Par exemple, si on veut modéliser le lancer d'une pièce de monnaie, chaque lancé correspond à une requête au programme qui retournera "face" ou "pile" avec une probabilité 1/2. Dans le cas de distributions continues,  prendra une valeur entre
prendra une valeur entre  et
et  avec une probabilité
avec une probabilité  . La distribution la plus utilisée est la gaussienne (parfois appelée courbe en cloche), elle vérifie
. La distribution la plus utilisée est la gaussienne (parfois appelée courbe en cloche), elle vérifie 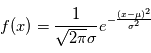 où
où  est sa moyenne et
est sa moyenne et  est sa variance. L'analyse des données repose sur l'hypothèse que nous observations des réalisations d'une variable aléatoire. Comme si réaliser une expérience consistait à demander à un ordinateur de sortir une valeur (la mesure) avec une certaine loi de probabilité.
est sa variance. L'analyse des données repose sur l'hypothèse que nous observations des réalisations d'une variable aléatoire. Comme si réaliser une expérience consistait à demander à un ordinateur de sortir une valeur (la mesure) avec une certaine loi de probabilité.
 et
et  . La racine carére de la variance est appelée l'écart-type. Cette quantité donne "l'écart-typique" à la moyenne des réalisations. Dans la plupart des cas et en particulier dans le cas gaussien, l'écart-type a une interprétation univoque: il quantifie les déviations à la moyenne. Plus il est petit, plus les valeurs éloignées de la moyenne seront improbables. Dans la limite ou l'écart-type tend vers 0, on aura une variable aléatoire certaine, qui prend la valeur
. La racine carére de la variance est appelée l'écart-type. Cette quantité donne "l'écart-typique" à la moyenne des réalisations. Dans la plupart des cas et en particulier dans le cas gaussien, l'écart-type a une interprétation univoque: il quantifie les déviations à la moyenne. Plus il est petit, plus les valeurs éloignées de la moyenne seront improbables. Dans la limite ou l'écart-type tend vers 0, on aura une variable aléatoire certaine, qui prend la valeur  avec une probabilité 1. En physique, on manipule souvent des incertitudes, qui sont implicitement modélisées comme des écart-types de variables aléatoires. Si un observateur dit "j'ai mesuré une vitesse radiale de
avec une probabilité 1. En physique, on manipule souvent des incertitudes, qui sont implicitement modélisées comme des écart-types de variables aléatoires. Si un observateur dit "j'ai mesuré une vitesse radiale de  km/s avec une incertitude de
km/s avec une incertitude de  km/s", implicitement on suppose qu'il existe une variable aléatoire dont la moyenne correspond à la "vraie" valeur de la vitesse radiale et dont l'écart-type vaut
km/s", implicitement on suppose qu'il existe une variable aléatoire dont la moyenne correspond à la "vraie" valeur de la vitesse radiale et dont l'écart-type vaut  km/s.
km/s.
 , où
, où  est la tension mesurée,
est la tension mesurée,  la tension vraie et
la tension vraie et  un bruit gaussien dû aux fluctuations intrinsèques de la tension et aux erreurs de mesure. On peut aussi supposer que le voltmètre réalise en réalité une moyenne de tensions sur un certain intervalle de temps.
un bruit gaussien dû aux fluctuations intrinsèques de la tension et aux erreurs de mesure. On peut aussi supposer que le voltmètre réalise en réalité une moyenne de tensions sur un certain intervalle de temps.
 , où
, où  désigne un espace de variables aléatoires, qui donne des observations
désigne un espace de variables aléatoires, qui donne des observations  en fonction d'instants d'observation
en fonction d'instants d'observation  , d'erreurs alétoires
, d'erreurs alétoires  et de paramètre du modèle
et de paramètre du modèle  incluant masse de la planète, de l'étoile, paramètres de l'orbites, etc. qui seront précisés. En l'occurrence, l'erreur est bien représentée par un "bruit additif", c'est à dire les observations
incluant masse de la planète, de l'étoile, paramètres de l'orbites, etc. qui seront précisés. En l'occurrence, l'erreur est bien représentée par un "bruit additif", c'est à dire les observations  sont de la forme
sont de la forme  , où
, où  désigne une fonction modélisant la physique du phénomène observée, celle qui donnerait les observations "parfaites", sans aucune source d'erreur aléatoire. L'erreur
désigne une fonction modélisant la physique du phénomène observée, celle qui donnerait les observations "parfaites", sans aucune source d'erreur aléatoire. L'erreur  modélise tous les phénomènes aléatoires intervenant dans les mesures. Selon la distinction adoptée ici, les paramètres du modèle peuvent inclure une source indésirable mais non aléatoire.
modélise tous les phénomènes aléatoires intervenant dans les mesures. Selon la distinction adoptée ici, les paramètres du modèle peuvent inclure une source indésirable mais non aléatoire.
 avec une modélisation physique. La modélisation la plus précise, utilisant tout ce que l'on sait de la physique serait ici inutilement complexe, car compte tenu des erreurs de mesures la différence avec certains modèles plus simples serait si faible qu'il serait impossible de la détecter avec un niveau de confiance acceptable. Le niveau de précision du modèle présenté ici est couramment utilisé par les observateurs.
avec une modélisation physique. La modélisation la plus précise, utilisant tout ce que l'on sait de la physique serait ici inutilement complexe, car compte tenu des erreurs de mesures la différence avec certains modèles plus simples serait si faible qu'il serait impossible de la détecter avec un niveau de confiance acceptable. Le niveau de précision du modèle présenté ici est couramment utilisé par les observateurs.
 (planète) et
(planète) et  (pour "star" de sorte à éviter un conflit de notation avec l'anomalie excentrique
(pour "star" de sorte à éviter un conflit de notation avec l'anomalie excentrique  ) de masses respectives
) de masses respectives  et
et  et
et  l'origine d'un repère Galiléen. Le principe fondamental de la dynamique s'écrit:
l'origine d'un repère Galiléen. Le principe fondamental de la dynamique s'écrit:
 où
où  est la constante universelle de gravitation.. En posant
est la constante universelle de gravitation.. En posant  et
et  on obtient:
on obtient:
 et
et  par la relation
par la relation  .
.
 . Pour la résoudre il faut trouver six quantités conservées au cours du mouvement (ou intégrales premières du mouvement) indépendantes. En l'occurrence on peut facilement montrer que deux vecteurs sont conservés au cours du mouvement (ce qui fait deux fois trois composantes, on a bien six scalaires conservés).
Notons
. Pour la résoudre il faut trouver six quantités conservées au cours du mouvement (ou intégrales premières du mouvement) indépendantes. En l'occurrence on peut facilement montrer que deux vecteurs sont conservés au cours du mouvement (ce qui fait deux fois trois composantes, on a bien six scalaires conservés).
Notons  , où
, où  est un vecteur unitaire (et donc
est un vecteur unitaire (et donc  est la norme de
est la norme de  ) et
) et  la dérivée par rapport au temps d'un vecteur
la dérivée par rapport au temps d'un vecteur  .
On a la conservation du moment cinétique par unité de masse
.
On a la conservation du moment cinétique par unité de masse  et du vecteur excentricité
et du vecteur excentricité  au cours du mouvement c'est à dire leur dérivée temporelle est nulle
au cours du mouvement c'est à dire leur dérivée temporelle est nulle
 une solution de l'équation de Newton. Alors
une solution de l'équation de Newton. Alors  car d'après l'équation de Newton,
car d'après l'équation de Newton,  est colinéaire à
est colinéaire à  . D'autre part,
. D'autre part,  , or
, or

 .
.
 .
.
 et comme
et comme  est un produit mixte, il est invariant par permutation circulaire:
est un produit mixte, il est invariant par permutation circulaire:  car le produit vectoriel de deux vecteurs colinéaires est nul. Le vecteur
car le produit vectoriel de deux vecteurs colinéaires est nul. Le vecteur  est orthogonal à
est orthogonal à  à tout instant, autrement dit le mouvement est dans un plan orthogonal à
à tout instant, autrement dit le mouvement est dans un plan orthogonal à  .
.
 l'angle entre
l'angle entre  et
et  et posons
et posons  . Alors comme
. Alors comme  est unitaire,
est unitaire,  d'autre part en remplaçant
d'autre part en remplaçant  par sa définition, on a
par sa définition, on a  et comme
et comme  est un produit mixte,
est un produit mixte,  . où
. où  est la norme de
est la norme de  . On obtient alors
. On obtient alors  en fonction de
en fonction de  :
:
 , qui est l'équation polaire d'une conique du plan. Cette équation donne une paramétrisation de la solution en fonction de
, qui est l'équation polaire d'une conique du plan. Cette équation donne une paramétrisation de la solution en fonction de  , appelée
, appelée  et le temps.
On sait que lorsque
et le temps.
On sait que lorsque  , il s'agit de l'équation d'une ellipse. On peut montrer géométriquement que
, il s'agit de l'équation d'une ellipse. On peut montrer géométriquement que  où
où  est le demi-grand axe de l'ellipse. Si
est le demi-grand axe de l'ellipse. Si  ou
ou  , la trajectoire est respectivement parabolique ou hyperbolique. Dans ces deux cas le mouvement n'est pas borné, il concernerait une planète en phase d'éjection, événement dont l'observation est très improbable et indiscernable d'une planète à très longue période ou du mouvement propre sur les données actuelles.
, la trajectoire est respectivement parabolique ou hyperbolique. Dans ces deux cas le mouvement n'est pas borné, il concernerait une planète en phase d'éjection, événement dont l'observation est très improbable et indiscernable d'une planète à très longue période ou du mouvement propre sur les données actuelles.
 , et le vecteur
, et le vecteur  est parallèle à
est parallèle à  . Notons
. Notons et
et  . On introduit un vecteur
. On introduit un vecteur  de sorte que
de sorte que  forme une base orthonormale.
forme une base orthonormale.
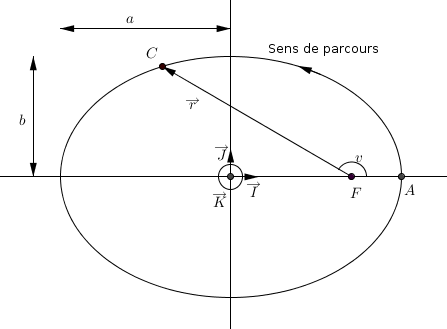

 , angle entre le vecteur excentricité et le vecteur
, angle entre le vecteur excentricité et le vecteur  .
.
 en fonction du temps on va introduire successivement deux variables,
en fonction du temps on va introduire successivement deux variables,  et
et  appelées respectivement '
appelées respectivement ' , donc
, donc en remplaçant dans,
en remplaçant dans,  on obtient:
on obtient:

 balaie les aires à vitesse constant
balaie les aires à vitesse constant  . En particulier l'aire totale de l'ellipse est parcourue en un certain temps
. En particulier l'aire totale de l'ellipse est parcourue en un certain temps  fixe: le mouvement est périodique. L'aire de l'ellipse vaut:
fixe: le mouvement est périodique. L'aire de l'ellipse vaut:

 avec
avec  . On définit alors l'
. On définit alors l' où
où  est le temps de passage au périastre (
est le temps de passage au périastre ( sur la figure), qui est proportionnelle à l'aire
sur la figure), qui est proportionnelle à l'aire  (voir figure).
(voir figure).
 et
et  de masses respectives
de masses respectives  et
et  . On pose
. On pose  ,
,  et
et  où
où  est la constante universelle de gravitation.
est la constante universelle de gravitation.

 . Déduire du théorème de l'énergie mécanique que
. Déduire du théorème de l'énergie mécanique que  est une quantité constante au cours du mouvement
est une quantité constante au cours du mouvement  est proportionnelle à l'anomalie moyenne
est proportionnelle à l'anomalie moyenne  .
.

 de rapport
de rapport  . Donc
. Donc
 l'angle
l'angle 

 s'obtient facilement car
s'obtient facilement car 
 en fonction de
en fonction de  . Cependant, on peut développer
. Cependant, on peut développer  en puissances de
en puissances de  .
.
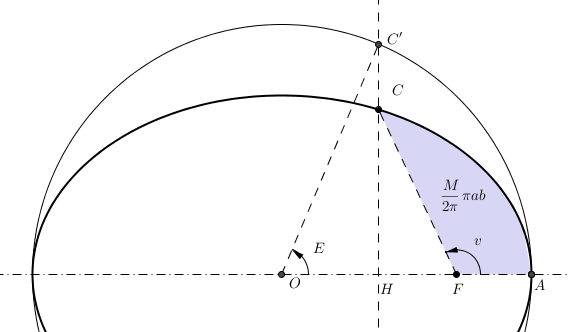
 , excentrique
, excentrique  et moyenne
et moyenne  .
.
 et
et  , ce qui s'obtient aisément en exprimant la position
, ce qui s'obtient aisément en exprimant la position  de
de  dans le plan
dans le plan  :
:

 en fonction de
en fonction de  puis
puis  en fonction de
en fonction de on a la position du corps à un instant quelconque. En ce qui concerne l'astrométrie, on peut s'arrêter aux équations ci-dessus et simplement faire un changement de référentiel, c'ést à dire exprimer la projection de
on a la position du corps à un instant quelconque. En ce qui concerne l'astrométrie, on peut s'arrêter aux équations ci-dessus et simplement faire un changement de référentiel, c'ést à dire exprimer la projection de  sur la sphère céleste et choisir un jeu de paramètres
sur la sphère céleste et choisir un jeu de paramètres  à ajuster. Pour les vitesses radiales nous avons besoin de
à ajuster. Pour les vitesses radiales nous avons besoin de  . En dérivant l'équation de Kepler par rapport à
. En dérivant l'équation de Kepler par rapport à  on obtient:
on obtient:

 en fonction de
en fonction de  . Les expressions ci-dessus suffisent. Pour mémoire, en remplaçant
. Les expressions ci-dessus suffisent. Pour mémoire, en remplaçant  dans la formule trigonométrique
dans la formule trigonométrique  , on obtient:
, on obtient:
 où
où  est la direction d'observation et
est la direction d'observation et  sont choisis de sorte que le repère est orthonormé direct. Le repère
sont choisis de sorte que le repère est orthonormé direct. Le repère  est lui aussi orthormé direct. La matrice de passage du repère orbital au repère d'observation est donc une rotation, que l'on décompose en trois rotations dont les angles ont des noms usuels.
est lui aussi orthormé direct. La matrice de passage du repère orbital au repère d'observation est donc une rotation, que l'on décompose en trois rotations dont les angles ont des noms usuels.
 d'axe
d'axe  (parallèle au moment cinétique), cet angle est appelé
(parallèle au moment cinétique), cet angle est appelé  .
.  d'axe
d'axe  , c'est l'
, c'est l'  d'axe
d'axe  , c'est l'
, c'est l'

 le barycentre du système {planète+étoile}, on note
le barycentre du système {planète+étoile}, on note  où
où  sont appelées les
sont appelées les  n'est en revanche qu'une convention pour ce cours et ne se trouve pas spécialement dans la littérature. On ne donne pas de nom particulier aux éléments de la dernière colonne de la matrice car étant donné que
n'est en revanche qu'une convention pour ce cours et ne se trouve pas spécialement dans la littérature. On ne donne pas de nom particulier aux éléments de la dernière colonne de la matrice car étant donné que  , ils n'apparaissent jamais dans les calculs
, ils n'apparaissent jamais dans les calculs
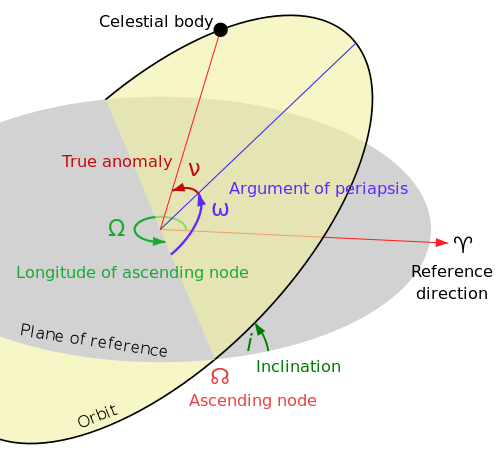
 : le demi-grand axe
: le demi-grand axe  : l'excentricité
: l'excentricité : la période
: la période : l'argument du périastre
: l'argument du périastre : l'inclinaison
: l'inclinaison : l'ascension droite au noeud ascendant
: l'ascension droite au noeud ascendant donné, il faut de plus connaître l'instant de son passage au périastre
donné, il faut de plus connaître l'instant de son passage au périastre  . On peut alors calculer
. On peut alors calculer  connaisant
connaisant  on peut calculer l'anomalie excentrique
on peut calculer l'anomalie excentrique  par l'équation de Kepler, puis l'anomalie vraie
par l'équation de Kepler, puis l'anomalie vraie  . On en déduit la position sur l'ellipse par l'équation donnée page
. On en déduit la position sur l'ellipse par l'équation donnée page  . Enfin, la position sur l'orbite est donnée par les rotations explicitées ci-dessus.
. Enfin, la position sur l'orbite est donnée par les rotations explicitées ci-dessus.
 , le mouvement de l'étoile
, le mouvement de l'étoile  en fonction du temps peut s'écrire:
en fonction du temps peut s'écrire:
 est la position du barycentre
est la position du barycentre  du système {Etoile, Planète} à
du système {Etoile, Planète} à  ,
,  est la direction du mouvement de
est la direction du mouvement de  et
et  son module.
son module. où
où  vérifie
vérifie , qui est une équation différentielle de degré deux sur l'espace. Lorsque
, qui est une équation différentielle de degré deux sur l'espace. Lorsque  est fixé et la position et la vitesse à
est fixé et la position et la vitesse à  ,
,  sont connus, la position et la vitesse sont données par le flot:
sont connus, la position et la vitesse sont données par le flot:  . En d'autres termes, les sept paramètres
. En d'autres termes, les sept paramètres  définissent une orbite de manière univoque. On peut faire un changement de variables pour décrire l'orbite par un autre jeu de sept paramètres, par exemple
définissent une orbite de manière univoque. On peut faire un changement de variables pour décrire l'orbite par un autre jeu de sept paramètres, par exemple  et
et  , qui sont les paramètres classiques présentés dans la section précédente. La plupart des auteurs les utilisent pour ajuster le mouvement des planètes, mais ils ont l'inconvénient d'être très sensibles aux erreurs pour de faibles excentricités et inclinaisons. Pour palier à ce problème on définit:
, qui sont les paramètres classiques présentés dans la section précédente. La plupart des auteurs les utilisent pour ajuster le mouvement des planètes, mais ils ont l'inconvénient d'être très sensibles aux erreurs pour de faibles excentricités et inclinaisons. Pour palier à ce problème on définit:
 : la longitude du périhélie
: la longitude du périhélie

 : le demi-grand axe
: le demi-grand axe : l'inclinaison
: l'inclinaison : l'ascension droite au noeud ascendant
: l'ascension droite au noeud ascendant : la longitude
: la longitude où la direction
où la direction  est selon la droite observateur - étoile. Avec les notations des pages précédentes, pour quelles valeurs de l'inclinaison
est selon la droite observateur - étoile. Avec les notations des pages précédentes, pour quelles valeurs de l'inclinaison  les observations de vitesses radiales ne donnent aucune information sur le système ? lequelles rendent la configuration optimale ?
Même question pour les angles
les observations de vitesses radiales ne donnent aucune information sur le système ? lequelles rendent la configuration optimale ?
Même question pour les angles  et
et  en astrométrie.
en astrométrie.
 où la direction
où la direction  est selon la droite observateur - étoile. On note
est selon la droite observateur - étoile. On note  les composantes du mouvement dans le plan orbital.
Calculer la composante du mouvement de l'étoile selon la direction d'observation. On mettra les observations sous la forme
les composantes du mouvement dans le plan orbital.
Calculer la composante du mouvement de l'étoile selon la direction d'observation. On mettra les observations sous la forme
 , où
, où  est une constante à déterminer.
Quels paramètres de l'orbite peut-on observer par vitesse radiale ? Montrer en particulier qu'on ne peut pas déterminer la masse exacte de la planète.
est une constante à déterminer.
Quels paramètres de l'orbite peut-on observer par vitesse radiale ? Montrer en particulier qu'on ne peut pas déterminer la masse exacte de la planète.
 planètes orbitent autour de l'étoile.
planètes orbitent autour de l'étoile.
 et
et  respectivement la position et la masse de l'étoile et
respectivement la position et la masse de l'étoile et  ,
,  les positions et masses des
les positions et masses des  planètes , les équations de la mécanique (classique) dans le référentiel barycentrique de ce système sont:
planètes , les équations de la mécanique (classique) dans le référentiel barycentrique de ce système sont:

 , c'est à dire l'intéraction entre les planètes, on obtient:
, c'est à dire l'intéraction entre les planètes, on obtient:
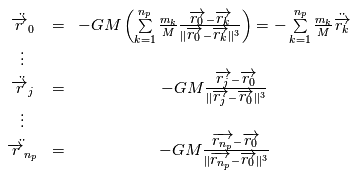
 problèmes à deux corps associés à chacune des planètes, par
problèmes à deux corps associés à chacune des planètes, par 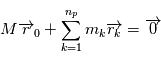 (dont la première équation du système ci-dessus est la dérivée seconde) on obtient le mouvement de l'étoile. Le modèle de trajectoire complet dans un référentiel galiléen est:
(dont la première équation du système ci-dessus est la dérivée seconde) on obtient le mouvement de l'étoile. Le modèle de trajectoire complet dans un référentiel galiléen est:
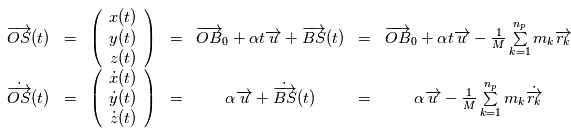
 , que l'on munit d'un repère de coordonnées sphériques
, que l'on munit d'un repère de coordonnées sphériques  repérant l'étoile
repérant l'étoile  . Supposons que l'observateur est situé en
. Supposons que l'observateur est situé en  . A un instant
. A un instant  il mesure:
il mesure:
 dans le cas de mesures astrométriques
dans le cas de mesures astrométriques ,
,  ,
,  , de même
, de même  (à faire en exercice).
Supposons que
(à faire en exercice).
Supposons que  planètes indéxées par
planètes indéxées par  gravitent autour de l'étoile en
gravitent autour de l'étoile en  et
et  le repère orbital de la planète
le repère orbital de la planète  . On projette le mouvement
. On projette le mouvement  dans le repère orthonormé direct
dans le repère orthonormé direct  associé aux coordonnées sphériques
associé aux coordonnées sphériques  (voir figure). Avec les notations de la page
(voir figure). Avec les notations de la page 
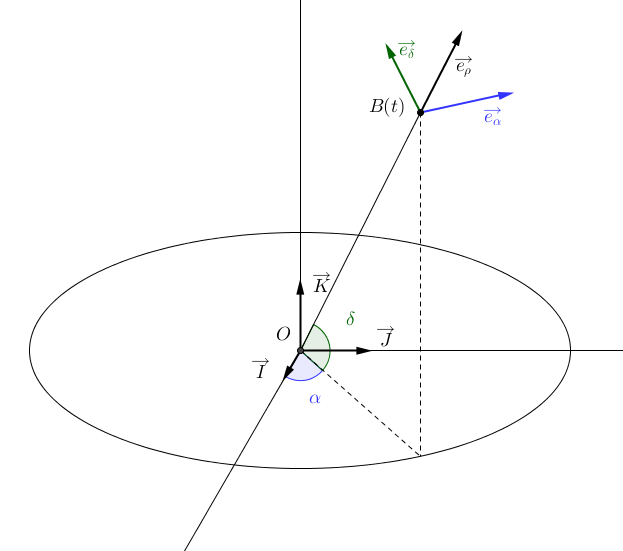
 .
.
 est la position de l'observateur,
est la position de l'observateur,  l'étoile cible on a
l'étoile cible on a 
 , il faut donc soustraire des observations
, il faut donc soustraire des observations 
 comme dans le cas des vitesses radiales, mais aussi s'assurer que toutes les observations sont exprimées dans le même référentiel (par exemple le référenciel barycentrique translaté, sur la figure) alors que chaque observation est dans un référentiel dépendant de l'observation (en rouge sur la figure). L'expression des mesures prises à des instants différents selon une même échelle se pose aussi pour les vitesses radiales, mais passe par l'étalonnage de l'instrument de mesure.
comme dans le cas des vitesses radiales, mais aussi s'assurer que toutes les observations sont exprimées dans le même référentiel (par exemple le référenciel barycentrique translaté, sur la figure) alors que chaque observation est dans un référentiel dépendant de l'observation (en rouge sur la figure). L'expression des mesures prises à des instants différents selon une même échelle se pose aussi pour les vitesses radiales, mais passe par l'étalonnage de l'instrument de mesure.  désigne la dérivée temporelle par rapport au RBSS.
désigne la dérivée temporelle par rapport au RBSS.
 par rapport au barycentre du système solaire peut se décomposer en
par rapport au barycentre du système solaire peut se décomposer en  . La partie
. La partie  est donné par les éphémérides, comme expliqué plus haut. La correction de la deuxième partie est essentielle: l'observateur parcourt deux fois le rayon terrestre en une nuit, ce qui donne une vitesse d'environ 300 m/s. Si
est donné par les éphémérides, comme expliqué plus haut. La correction de la deuxième partie est essentielle: l'observateur parcourt deux fois le rayon terrestre en une nuit, ce qui donne une vitesse d'environ 300 m/s. Si  désigne la matrice de changement de repère entre le référentiel lié à la Terre et le référentiel barycentrique du système solaire, on a
désigne la matrice de changement de repère entre le référentiel lié à la Terre et le référentiel barycentrique du système solaire, on a  où
où  désigne la position de l'observateur dans le référentiel terrestre.
désigne la position de l'observateur dans le référentiel terrestre.
 est aussi un sujet à part entière, appelé "rotation de la Terre". Les paramètres de rotations officiels sont donnés par le
est aussi un sujet à part entière, appelé "rotation de la Terre". Les paramètres de rotations officiels sont donnés par le  la position de la Terre dans le RBS. En exprimant
la position de la Terre dans le RBS. En exprimant  dans le RBSS de deux manières on obtient une relation entre les coordonnées
dans le RBSS de deux manières on obtient une relation entre les coordonnées  et
et  :
:
 est suffisamment loin, ces expressions différenciées au voisinage de
est suffisamment loin, ces expressions différenciées au voisinage de  donnent au premier ordre en
donnent au premier ordre en  ,
,  et
et 

 la parallaxe de l'étoile (en général notée
la parallaxe de l'étoile (en général notée  ou
ou  , qui sont des symboles déjà utilisés dans le cours). Elle considérée comme constante au cours des observations et est ajustée aux observations en astrométrie.
, qui sont des symboles déjà utilisés dans le cours). Elle considérée comme constante au cours des observations et est ajustée aux observations en astrométrie.
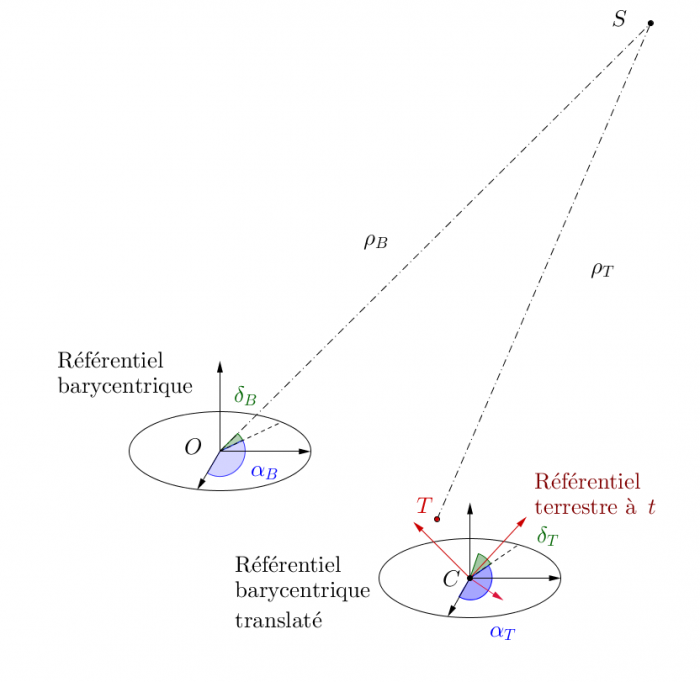
 .
.
 où
où  est la vitesse du système observé,
est la vitesse du système observé,  la distance entre l'observateur et le système,
la distance entre l'observateur et le système,  est l'angle entre la ligne de visée et la vitesse du système observé.
Nous supposons que les mesures astrométriques sont sur un plan. Cependant, on mesure la projection du mouvement sur une sphère, donc
est l'angle entre la ligne de visée et la vitesse du système observé.
Nous supposons que les mesures astrométriques sont sur un plan. Cependant, on mesure la projection du mouvement sur une sphère, donc  n'est pas constant au cours du temps. En dérivant par rapport au temps, comme
n'est pas constant au cours du temps. En dérivant par rapport au temps, comme  est constant:
est constant:
 que
que  et
et  . D'où:
. D'où:
 , où le mouvement angulaire sur la sphère céleste est donné par
, où le mouvement angulaire sur la sphère céleste est donné par  .
.
 . Comme elle est du deuxième ordre en
. Comme elle est du deuxième ordre en  , elle n'est en général pas prise en compte.
, elle n'est en général pas prise en compte.
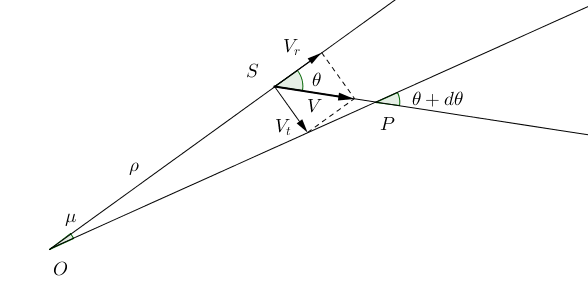

 ou bien
ou bien  dans le cas des vitesses radiales. Il est impossible de distinguer les masses
dans le cas des vitesses radiales. Il est impossible de distinguer les masses  et
et séparément a priori. Cependant, on peut mesurer la masse de l'étoile de sorte à lever l'indetermination.
séparément a priori. Cependant, on peut mesurer la masse de l'étoile de sorte à lever l'indetermination.
 (si on ne connaît pas la distance on ne mesure évidemment que la luminosité apparente). Par son spectre, on peut mesurer sa température effective
(si on ne connaît pas la distance on ne mesure évidemment que la luminosité apparente). Par son spectre, on peut mesurer sa température effective  . Des modèles d'intérieurs stellaires permettent ensuite d'évaluer la masse. Cette estimation peut être rafinée avec un modèle d'atmosphère stellaire. On peut alors avoir la gravité à la surface de l'étoile
. Des modèles d'intérieurs stellaires permettent ensuite d'évaluer la masse. Cette estimation peut être rafinée avec un modèle d'atmosphère stellaire. On peut alors avoir la gravité à la surface de l'étoile  . Comme
. Comme  et
et  , on peut avoir une estimation de la masse.
, on peut avoir une estimation de la masse.
 près. Pour lever cette indetermination, il faut déterminer l'inclinaison de l'orbite par rapport à l'observateur
près. Pour lever cette indetermination, il faut déterminer l'inclinaison de l'orbite par rapport à l'observateur  . Si on observe des eclipses (une binaire passe devant l'autre),
. Si on observe des eclipses (une binaire passe devant l'autre), 
 . Si le système n'est pas dans cette configuration, on peut séparer angulairement les deux étoiles par des techniques d'interférométrie.
. Si le système n'est pas dans cette configuration, on peut séparer angulairement les deux étoiles par des techniques d'interférométrie.
 , toutes définies sur le même espace de probabilité (
, toutes définies sur le même espace de probabilité ( . Dans ce cours on aura seulement besoin de
. Dans ce cours on aura seulement besoin de  ou
ou  . On note
. On note  l'espérance mathématique.
l'espérance mathématique.
 (pour
(pour  ) dépend des valeurs prises à d'autres "instants" par les autres variables aléatoires. En particulier on peut s'intéresser à une éventuelle probabilité de périodicité. Par exemple si on modélise un nombre de ventes de vêtement par jour, on verra des ventes plus importantes au moment des soldes (à peu près tous les six mois). La densité spectrale de puissance est un outil qui permet de visualiser ce genre de périodicité. Dans la section suivante, on voit que si on prend une famille de variables aléatoires certaines, c'est à dire que
) dépend des valeurs prises à d'autres "instants" par les autres variables aléatoires. En particulier on peut s'intéresser à une éventuelle probabilité de périodicité. Par exemple si on modélise un nombre de ventes de vêtement par jour, on verra des ventes plus importantes au moment des soldes (à peu près tous les six mois). La densité spectrale de puissance est un outil qui permet de visualiser ce genre de périodicité. Dans la section suivante, on voit que si on prend une famille de variables aléatoires certaines, c'est à dire que  vaut une certaine valeur réelle
vaut une certaine valeur réelle  avec la probabilité 1, la DSP en une fréquence
avec la probabilité 1, la DSP en une fréquence  est égale à
est égale à  , où
, où  est la transformée de Fourier de
est la transformée de Fourier de  . Si maintenant
. Si maintenant  est une variable alétoire, la DSP sera la "transformée de Fourier typique" d'une réalisation de
est une variable alétoire, la DSP sera la "transformée de Fourier typique" d'une réalisation de  .
.
 sont des variables aléatoires et
sont des variables aléatoires et  une fonction mesurable alors
une fonction mesurable alors  est une variable aléatoire. En particulier, si
est une variable aléatoire. En particulier, si  est un scalaire,
est un scalaire,  et
et  sont des variables aléatoires. Pour un rappel sur les variables aléatoires, voir le cours de Didier Pelat.
sont des variables aléatoires. Pour un rappel sur les variables aléatoires, voir le cours de Didier Pelat.
 un espace de probabilités, on dit que la suite de variables aléatoires
un espace de probabilités, on dit que la suite de variables aléatoires  telle que
telle que  , définies sur cet espace converge en moyenne quadratique si et seulement si:
, définies sur cet espace converge en moyenne quadratique si et seulement si:
 un processus stochastique continu (
un processus stochastique continu ( ) tel que chacune des variables aléatoires
) tel que chacune des variables aléatoires  a une espérance finie (
a une espérance finie ( ). L'intégrale en moyenne quadratique du processus
). L'intégrale en moyenne quadratique du processus  sur l'intervalle
sur l'intervalle ![[a,b]](../pages_ind-vr/equations_etoile/equation44.png) est définie comme la limite en moyenne quadratique (lorsqu'elle existe) de:
est définie comme la limite en moyenne quadratique (lorsqu'elle existe) de:
 et
et  . On la note alors
. On la note alors  .
.

 est telle que
est telle que  avec une probabilité 1, l'intégrale en moyenne quadratique se comporte comme l'intérale de Riemann, alors
avec une probabilité 1, l'intégrale en moyenne quadratique se comporte comme l'intérale de Riemann, alors  est le carré du module de la transformée de Fourier de la fonction réelle d'une variable réelle
est le carré du module de la transformée de Fourier de la fonction réelle d'une variable réelle  . Dans le cas où les
. Dans le cas où les  sont aléatoire,
sont aléatoire,  est le carré de la transformée de Fourier "en moyenne" des réalisations de
est le carré de la transformée de Fourier "en moyenne" des réalisations de  Par exemple si
Par exemple si  modélise une tension mesurée au cours du temps dans une expérience d'électronique réalisée un grand nombre de fois, donnant
modélise une tension mesurée au cours du temps dans une expérience d'électronique réalisée un grand nombre de fois, donnant  profils de tension
profils de tension  à l'expérience
à l'expérience  (des réalisations du processus stochastique
(des réalisations du processus stochastique  ), la moyenne des carrés du module des transformées de Fourier des
), la moyenne des carrés du module des transformées de Fourier des  notée
notée  sera approximativement égal à
sera approximativement égal à  . Si le nombre d'expérience
. Si le nombre d'expérience  tend vers l'infini
tend vers l'infini  en norme 2.
en norme 2.
 ), on peut directement définir
), on peut directement définir  et
et  .
.
 vérifié:
vérifié:
 tel que
tel que 
 ne dépend que de
ne dépend que de  , i. e.
, i. e.  tels que
tels que  , on a
, on a  . On note appelle alors habituellement la fonction d'autocorrélation
. On note appelle alors habituellement la fonction d'autocorrélation  , telle que
, telle que 
 de manière absolue, mais de manière relative à un autre instant. Dans ce cas, la densité spectrale de puissance est égale au carré du module de la transformée de Fourier de la fonction
de manière absolue, mais de manière relative à un autre instant. Dans ce cas, la densité spectrale de puissance est égale au carré du module de la transformée de Fourier de la fonction  . L'équivalence avec la définition de la densité spectrale de puissance donnée plus haut est établie par le théorème de Wiener-Khinchin.
. L'équivalence avec la définition de la densité spectrale de puissance donnée plus haut est établie par le théorème de Wiener-Khinchin.
 la valeur passe de 1 à -1, la densité de probabilité pour que la valeur passe à 1 à
la valeur passe de 1 à -1, la densité de probabilité pour que la valeur passe à 1 à  est
est  où
où  est un réel positif. Pour les vitesses radiales, la densité spectrale de puissance de ces bruits peut être modélisée par::
est un réel positif. Pour les vitesses radiales, la densité spectrale de puissance de ces bruits peut être modélisée par::

 et
et  sont ajustés sur le spectre de puissance du signal.
sont ajustés sur le spectre de puissance du signal.
 mois), et à plus long terme à travers des cycles d'activité magnétique.
mois), et à plus long terme à travers des cycles d'activité magnétique.
 . Vue du dessus, l'atmosphère se comporte approximativement comme un tableau de pixels de taille
. Vue du dessus, l'atmosphère se comporte approximativement comme un tableau de pixels de taille  dont chaque cellule introduit une déviation angulaire du faisceau incident. Cette déviation est de l'ordre de
dont chaque cellule introduit une déviation angulaire du faisceau incident. Cette déviation est de l'ordre de  . Dans le cas limite où une cellule a un indice 0 et les cellules avoisinantes ont un indice 1 (sont opaques), on retrouve l'ordre de grandeur de la diffraction. Les fronts d'ondes issus de ces différents pixels arrivent au télescope avec des angles différents, donc donnent chacun une image différente appelé "speckle". L'union de ces speckle forme une tache lumineuse élargie de taille environ égale à
. Dans le cas limite où une cellule a un indice 0 et les cellules avoisinantes ont un indice 1 (sont opaques), on retrouve l'ordre de grandeur de la diffraction. Les fronts d'ondes issus de ces différents pixels arrivent au télescope avec des angles différents, donc donnent chacun une image différente appelé "speckle". L'union de ces speckle forme une tache lumineuse élargie de taille environ égale à  .
.
 as
Jupiter: 500, 20
as
Jupiter: 500, 20  as
à 1 et 10 parsec resp.
as
à 1 et 10 parsec resp. UA
UA 0.5 m/s
à cause des incertitudes sur la rotation de la Terre
et les éphémérides)
0.5 m/s
à cause des incertitudes sur la rotation de la Terre
et les éphémérides)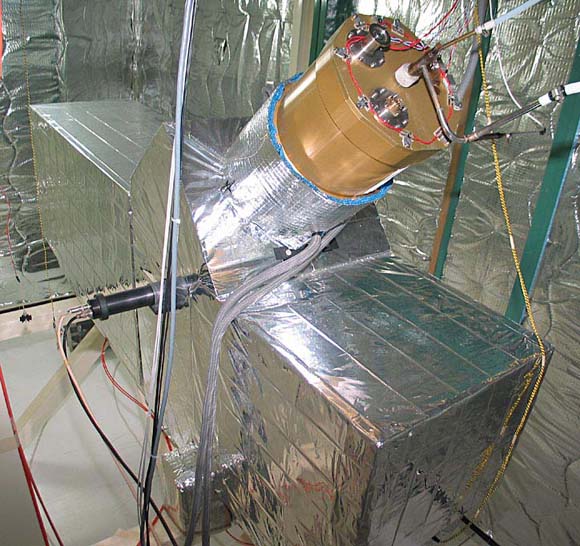
 sur le plan focal est en première approximation
sur le plan focal est en première approximation  , où
, où  est la distance focale. Pour les angles faibles, on peut travailler avec une lentille équivalente au télescope, de même diamètre et distance focale. On va introduire trois notions de bases sur les télescopes: le champ, la résolution angulaire et la vitesse d'acquisition.
est la distance focale. Pour les angles faibles, on peut travailler avec une lentille équivalente au télescope, de même diamètre et distance focale. On va introduire trois notions de bases sur les télescopes: le champ, la résolution angulaire et la vitesse d'acquisition.

 soit placée en un point du plan focal
soit placée en un point du plan focal  . A cause du phénomène de diffraction, la lumière ne sera pas émise selon une direction unique, mais son énergie sera répartie sur certains angles centrés sur
. A cause du phénomène de diffraction, la lumière ne sera pas émise selon une direction unique, mais son énergie sera répartie sur certains angles centrés sur  . Comme la lumière suit le même trajet dans les deux sens, ce détecteur reçoit de la lumière provenant de ces angles.
. Comme la lumière suit le même trajet dans les deux sens, ce détecteur reçoit de la lumière provenant de ces angles.
 , son image sur le plan focal est un cercle d'aire
, son image sur le plan focal est un cercle d'aire  . L'intensité observée est proportionnel à l'aire du télescope, donc l'énergie par unité de temps reçue est proportionnelle à
. L'intensité observée est proportionnel à l'aire du télescope, donc l'énergie par unité de temps reçue est proportionnelle à  . On définit l'ouverture du télescope par
. On définit l'ouverture du télescope par  Le rapport signal sur bruit des mesures de CCD est égal à
Le rapport signal sur bruit des mesures de CCD est égal à  où
où  est le nombre moyen d'électron par unité de temps et
est le nombre moyen d'électron par unité de temps et  est le temps d'intégration (voir
est le temps d'intégration (voir 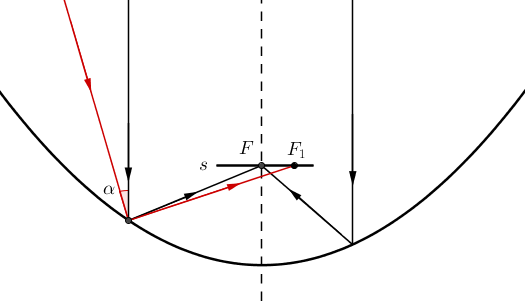
 .Ceux qui arrivent avec un certain angle arrivent légèrement décalés.
.Ceux qui arrivent avec un certain angle arrivent légèrement décalés.
 et une jonction de semiconducteurs NP. Les électrodes en polysilicium sont reliées périodoquement par un fil conducteur (toutes les trois électrodes sur la figure) de sorte à créer un profil de potentiel électrique alternant puits et régions plates. Le principe d'un capteur CCD est le suivant (voir figure)
et une jonction de semiconducteurs NP. Les électrodes en polysilicium sont reliées périodoquement par un fil conducteur (toutes les trois électrodes sur la figure) de sorte à créer un profil de potentiel électrique alternant puits et régions plates. Le principe d'un capteur CCD est le suivant (voir figure)
 où
où  est le champ électrique,
est le champ électrique,  est la charge de l'électron, et que le champ est orienté vers le bas l'électron est piégé sous l'isolant.
est la charge de l'électron, et que le champ est orienté vers le bas l'électron est piégé sous l'isolant. 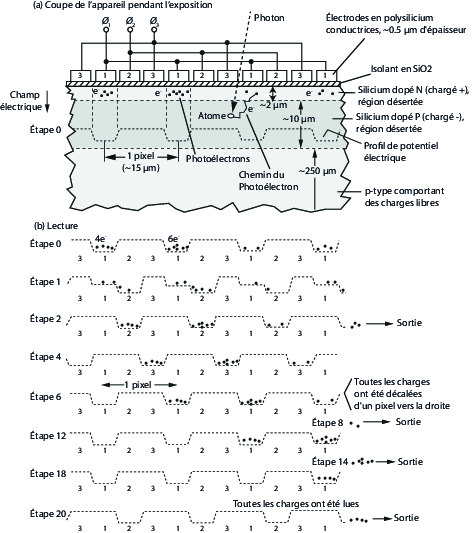
 le temps d'attente entre deux émission de photon, la probabilité que
le temps d'attente entre deux émission de photon, la probabilité que  soit supérieure à
soit supérieure à  sachant que
sachant que  est
est  où
où  est une constante.
est une constante.
 diminue rapidement à
diminue rapidement à  donné, c'est à dire plus la probabilité que
donné, c'est à dire plus la probabilité que  soit long diminue. On peut montrer
soit long diminue. On peut montrer  est le nombre d'évènement par unité de temps moyen, proportionnelle à l'intensité. Rappelons que le détecteur capte des photons pendant le
est le nombre d'évènement par unité de temps moyen, proportionnelle à l'intensité. Rappelons que le détecteur capte des photons pendant le  . Le nombre de photons reçus
. Le nombre de photons reçus  pendant ce temps est une variable aléatoire suivant la loi:
pendant ce temps est une variable aléatoire suivant la loi:
 . En conséquence, l'écart-type vaut
. En conséquence, l'écart-type vaut  donc le rapport signal sur bruit (Signal-to-Noise Ratio) est:
donc le rapport signal sur bruit (Signal-to-Noise Ratio) est:
 où
où  est le flux lumineux reçu et un flux de référence. Le choix de 2.5 et
est le flux lumineux reçu et un flux de référence. Le choix de 2.5 et  W
W
 fait que les étoiles de classe 1 d'Hipparque aient une magnitude comprise entre 0 et 1, les classes 2 on une magnitude entre 1 et 2 etc. De ce fait, il semble naturel que les objets les moins lumineux visibles à l'oeil nu soient environ de magnitude 6. On considère un télescope de diamètre
fait que les étoiles de classe 1 d'Hipparque aient une magnitude comprise entre 0 et 1, les classes 2 on une magnitude entre 1 et 2 etc. De ce fait, il semble naturel que les objets les moins lumineux visibles à l'oeil nu soient environ de magnitude 6. On considère un télescope de diamètre  , on suppose qu'on observe dans le visible
, on suppose qu'on observe dans le visible ![\Delta \lambda = [400,800]](../pages_ind-vr/equations_instrumentation/equation42.png) nm, et que le flux lumineux reçu ne dépend pas de la longueur d'onde sur cette plage.
nm, et que le flux lumineux reçu ne dépend pas de la longueur d'onde sur cette plage.
 où
où  est la longueur d'onde et
est la longueur d'onde et  la vitesse de la lumière, montrer que le flux de photon reçus
la vitesse de la lumière, montrer que le flux de photon reçus  (photons par seconde) est lié au flux
(photons par seconde) est lié au flux  par
par 
 en fonction de la magnitude observée, de
en fonction de la magnitude observée, de  et
et 
 la distance entre la source et l'observateur,
la distance entre la source et l'observateur,  la vitesse de l'onde et. Par définition d'une onde harmonique de pulsation
la vitesse de l'onde et. Par définition d'une onde harmonique de pulsation  et d'amplitude
et d'amplitude  , l'amplitude mesurée à
, l'amplitude mesurée à  et
et  vaut
vaut

 donne en particulier la phase en
donne en particulier la phase en  . Si la distance
. Si la distance  varie avec le temps selon
varie avec le temps selon  , alors en
, alors en  et
et  on mesure
on mesure

 ou de longueur d'onde
ou de longueur d'onde  et de phase
et de phase  .
.
 est la vitesse de la lumière, la relativité générale donne une description beaucoup plus précise du phénomène. Nous ne présenterons pas le calcul menant à l'expression de l'effet Doppler dans ce cadre mais en donnons l'expression:
est la vitesse de la lumière, la relativité générale donne une description beaucoup plus précise du phénomène. Nous ne présenterons pas le calcul menant à l'expression de l'effet Doppler dans ce cadre mais en donnons l'expression:
 est l'angle entre la direction de la vitesse relative et la ligne de visée observateur-source. Remarquons que lorsque
est l'angle entre la direction de la vitesse relative et la ligne de visée observateur-source. Remarquons que lorsque  tend vers
tend vers  et
et  tend vers 0, l'expression tend vers l'expression classique.
tend vers 0, l'expression tend vers l'expression classique.
 d'une longeur d'onde
d'une longeur d'onde  et de la sa variation détectable par le dispositi f
et de la sa variation détectable par le dispositi f  est de l'ordre de 100000. Des simulations numériques (Hatzes & Cochran 1992) ont montré que l'écart type sur la mesure finale de vitesse radiale
est de l'ordre de 100000. Des simulations numériques (Hatzes & Cochran 1992) ont montré que l'écart type sur la mesure finale de vitesse radiale  vérifie:
vérifie:
 est l'intensité reçue,
est l'intensité reçue,  est la plage de fréquences considérées et
est la plage de fréquences considérées et  est une constante de proportionnalité. Comme certaines longueurs d'ondes jugées contaminées peuvent être exclues de certaines mesures, cette valeur varie d'une mesure à l'autre.
est une constante de proportionnalité. Comme certaines longueurs d'ondes jugées contaminées peuvent être exclues de certaines mesures, cette valeur varie d'une mesure à l'autre.
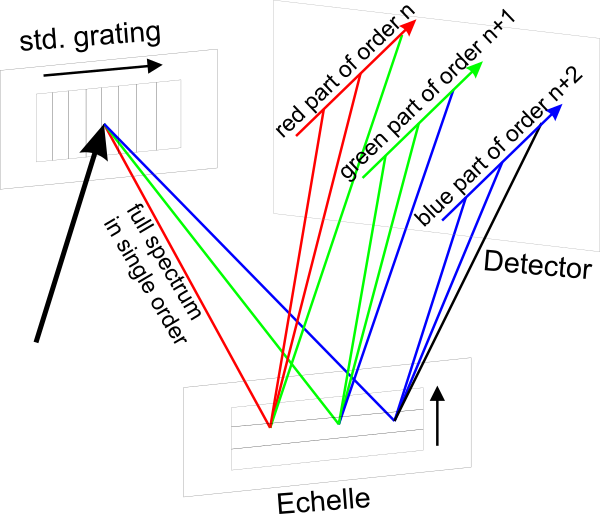
 valant 1 pour
valant 1 pour  correspondant à une raie d'absorption de l'étoile et 0 ailleurs. Le spectre de l'étoile observée
correspondant à une raie d'absorption de l'étoile et 0 ailleurs. Le spectre de l'étoile observée  est multiplié par ce masque décalé d'une valeur
est multiplié par ce masque décalé d'une valeur  et on mesure
et on mesure  . Où
. Où  et
et  désignent les bornes inférieures et supérieures du spectre observé. Ensuite, une fonction gaussienne
désignent les bornes inférieures et supérieures du spectre observé. Ensuite, une fonction gaussienne  est ajustée sur la CCF. La valeur
est ajustée sur la CCF. La valeur  correspondant au minimum de la fonction ajustée est prise comme valeur moyenne du déplacement. L'analyse consiste ensuite à comparer les
correspondant au minimum de la fonction ajustée est prise comme valeur moyenne du déplacement. L'analyse consiste ensuite à comparer les  issus d'observations différentes.
issus d'observations différentes.
 où
où  sont les paramètres du modèle et
sont les paramètres du modèle et  sont les instants d'observation. De nombreuses sources d'erreurs ont aussi été listées. On se pose maintenant la question suivante: comment estimer les paramètres du modèle compte tenu des observations ?
sont les instants d'observation. De nombreuses sources d'erreurs ont aussi été listées. On se pose maintenant la question suivante: comment estimer les paramètres du modèle compte tenu des observations ?
 sur la sphère céleste est
sur la sphère céleste est

 est la position initiale de l'étoile,
est la position initiale de l'étoile,  sont les composantes du mouvement propre
sont les composantes du mouvement propre  sont des termes d'accélération de perspective,
sont des termes d'accélération de perspective,  sont les constantes de Thiele-Innes de la planète
sont les constantes de Thiele-Innes de la planète  ,
,  et
et  sont ses coordonnées sur son plan orbital,
sont ses coordonnées sur son plan orbital,  est la parallaxe,
est la parallaxe,  sont les coefficients parametrant le mouvement de la Terre, Les
sont les coefficients parametrant le mouvement de la Terre, Les  sont les bruits résiduels modélisés par des bruits gaussiens.:
sont les bruits résiduels modélisés par des bruits gaussiens.:  sont les bruits stellaires,
sont les bruits stellaires,  sont les bruits atmosphériques et
sont les bruits atmosphériques et  représentent des bruits instrumentaux.
représentent des bruits instrumentaux.

 est la vitesse de l'observateur dans le référentiel barycentrique du système solaire,
est la vitesse de l'observateur dans le référentiel barycentrique du système solaire,  est la composante du mouvement propre dans la direction radiale,
est la composante du mouvement propre dans la direction radiale,  est le signal stellaire dû à la granulation, aux oscillations et à l'activité,
est le signal stellaire dû à la granulation, aux oscillations et à l'activité,  est le bruit stellaire résiduel et
est le bruit stellaire résiduel et  le bruit associé à la mesure.
le bruit associé à la mesure.
 (nombre de planètes, leurs caractéristiques orbitales, la période de rotation de l'étoile etc.). S'il n'y avait pas de bruit, une mesure à l'instant
(nombre de planètes, leurs caractéristiques orbitales, la période de rotation de l'étoile etc.). S'il n'y avait pas de bruit, une mesure à l'instant  reviendrait à demander à l'ordinateur d'évaluer une fonction
reviendrait à demander à l'ordinateur d'évaluer une fonction  . Nous connaissons
. Nous connaissons  et
et  (c'est l'un des modèles de la page précédente), mais nous ne connaissons pas
(c'est l'un des modèles de la page précédente), mais nous ne connaissons pas  . Notre but est de le déterminer à partir des mesures
. Notre but est de le déterminer à partir des mesures  . Ce principe est similaire à la résolution d'une énigme: quelqu'un connaît une information
. Ce principe est similaire à la résolution d'une énigme: quelqu'un connaît une information  et nous essayons de la deviner en posant une question. Dans le cas sans bruit, celui qui pose l'énigme ne nous induit pas en erreur, mais cela ne veut pas dire que la résolution est facile !
et nous essayons de la deviner en posant une question. Dans le cas sans bruit, celui qui pose l'énigme ne nous induit pas en erreur, mais cela ne veut pas dire que la résolution est facile !
 (ici
(ici  ). On évalue la valeur de
). On évalue la valeur de  en
en  , on obtient
, on obtient  : on a deux inconnues pour une équation, on ne peut pas résoudre. Si on a
: on a deux inconnues pour une équation, on ne peut pas résoudre. Si on a  , avec
, avec  , alors on a
, alors on a  et
et  .
.
 où
où  est la réalisation d'une variable aléatoire
est la réalisation d'une variable aléatoire  . A l'appel numéro
. A l'appel numéro  du programme, l'ordinateur fait appel à un autre programme qui délivre une variable alétoire selon une certaine loi. En l'occurrence, nous supposons cette loi gaussienne. Si nous faisons
du programme, l'ordinateur fait appel à un autre programme qui délivre une variable alétoire selon une certaine loi. En l'occurrence, nous supposons cette loi gaussienne. Si nous faisons  mesures, tout se passe comme si un programme principal évaluait la fonction
mesures, tout se passe comme si un programme principal évaluait la fonction  et
et  programmes secondaires
programmes secondaires  ,
,  retournent chacun une valeur
retournent chacun une valeur  . Si nous pouvions remonter le temps et faire les mesures plusieurs fois aux mêmes instants, on aurait des des vecteurs de mesures
. Si nous pouvions remonter le temps et faire les mesures plusieurs fois aux mêmes instants, on aurait des des vecteurs de mesures  , puis
, puis  etc. (notez qu'ici
etc. (notez qu'ici  et
et  sont des vecteurs.
sont des vecteurs.
 , ils nous est impossible de connaître les paramètres avec certitude. On leur attache une "erreur", qui quantifie l'incertitude que l'on a sur eux. En reprenant l'exemple précédent on mesure
, ils nous est impossible de connaître les paramètres avec certitude. On leur attache une "erreur", qui quantifie l'incertitude que l'on a sur eux. En reprenant l'exemple précédent on mesure  et
et  . Si on estime
. Si on estime  et
et  avec les mêmes formules, on fera une erreur
avec les mêmes formules, on fera une erreur  sur
sur  et une erreur
et une erreur  sur
sur  (admis).
(admis).
 , le symbole
, le symbole  désigne un bruit gaussien. Comme ils apparaissent constamment en détection de planètes extrasolaires et ailleurs, nous allons en donner quelques propriétés.
désigne un bruit gaussien. Comme ils apparaissent constamment en détection de planètes extrasolaires et ailleurs, nous allons en donner quelques propriétés.
 prendra une valeur
prendra une valeur  imprévisible. La probabilité que la valeur de
imprévisible. La probabilité que la valeur de  soit comprise entre
soit comprise entre  et
et  est
est  où
où  est la densité de probabilité de
est la densité de probabilité de  . Dire que
. Dire que  est un bruit gaussien veut dire que sa densité est de la forme
est un bruit gaussien veut dire que sa densité est de la forme  où
où  et
et  sont des réels, qui sont égaux respectivement à la moyenne et à l'écart-type de
sont des réels, qui sont égaux respectivement à la moyenne et à l'écart-type de  . On note souvent
. On note souvent  , qui signifie "
, qui signifie " suit une loi gaussienne de moyenne
suit une loi gaussienne de moyenne  et de variance
et de variance  . Dans la plupart des cas, le bruit est de moyenne nulle (c'est le cas ici).
. Dans la plupart des cas, le bruit est de moyenne nulle (c'est le cas ici).
 et le bruit de mesure
et le bruit de mesure  suiven une certaine loi, quelle loi suivra
suiven une certaine loi, quelle loi suivra  ? Nous pouvons déjà dire que la moyenne de
? Nous pouvons déjà dire que la moyenne de  sera égale à la somme des moyennes de
sera égale à la somme des moyennes de  et
et  car l'espérance est un opérateur linéaire. Peut-on dire plus ? Si ces bruits dépendaient l'un de l'autre, la réponse pourrait être complexe. En l'occurrence, la physique de l'étoile cible et les erreurs instrumentales sont totalement indépendantes. On peut montrer que dans ces conditions, la variance de
car l'espérance est un opérateur linéaire. Peut-on dire plus ? Si ces bruits dépendaient l'un de l'autre, la réponse pourrait être complexe. En l'occurrence, la physique de l'étoile cible et les erreurs instrumentales sont totalement indépendantes. On peut montrer que dans ces conditions, la variance de  est égale à la somme des variances de
est égale à la somme des variances de  et
et  . Nous pouvons même aller plus loin car la somme de deux variables gaussiennes indépendante est une variable gaussienne. En résumé,
. Nous pouvons même aller plus loin car la somme de deux variables gaussiennes indépendante est une variable gaussienne. En résumé,  en l'occurrence
en l'occurrence  et
et  sont nulles.
sont nulles.
 on a un certain bruit
on a un certain bruit  réalisation d'une variable
réalisation d'une variable  de densité
de densité  . La plupart du temps, on fait l'hypothèse que les brutis
. La plupart du temps, on fait l'hypothèse que les brutis  sont indépendants, c'est à dire que la probabilité d'obtenir le bruit
sont indépendants, c'est à dire que la probabilité d'obtenir le bruit  à l'expérience
à l'expérience  ne dépend pas des valeurs prises aux expériences précédentes et suivantes. Lorsque ce n'est pas le cas on parle de bruits corrélés. Pour les caractériser, on utilise souvent leur
ne dépend pas des valeurs prises aux expériences précédentes et suivantes. Lorsque ce n'est pas le cas on parle de bruits corrélés. Pour les caractériser, on utilise souvent leur  où
où  est une variable gaussienne suivant la loi
est une variable gaussienne suivant la loi  .
.
 qui est perturbée par un bruit gaussien additif
qui est perturbée par un bruit gaussien additif  de moyenne nulle et d'écart-type
de moyenne nulle et d'écart-type  , donnant une mesure
, donnant une mesure  .
.
 ), les mesures seraient uniquement dues au bruit. On imagine deux cas de figures:
), les mesures seraient uniquement dues au bruit. On imagine deux cas de figures:
 . La probabilité d'avoir obtenue une valeur au moins aussi grande par hasard, c'est à dire la probabilité que
. La probabilité d'avoir obtenue une valeur au moins aussi grande par hasard, c'est à dire la probabilité que  sachant que
sachant que  est
est 
 . La probabilité pour que
. La probabilité pour que  alors que
alors que  est
est 
 dans
dans  % des cas et
% des cas et  dans
dans  % des cas.Dans le premier cas, la probabilité d'avoir un signal aussi grand que celui que l'on a mesuré est grande. On ne peut pas assurer qu'un signal a été détecté. Par contre, dans le deuxième cas on serait dans un des deux cas sur un milliard où le signal serait dû au bruit. On peut alors dire qu'on a détecté un signal à
% des cas.Dans le premier cas, la probabilité d'avoir un signal aussi grand que celui que l'on a mesuré est grande. On ne peut pas assurer qu'un signal a été détecté. Par contre, dans le deuxième cas on serait dans un des deux cas sur un milliard où le signal serait dû au bruit. On peut alors dire qu'on a détecté un signal à  , car la valeur de l'écart-type du bruit est
, car la valeur de l'écart-type du bruit est  , sa moyenne est
, sa moyenne est  , donc on a
, donc on a  .
.
 sigmas.
sigmas.
 de densité de probabilité
de densité de probabilité  sont données par
sont données par  et
et 
 une variable aléatoire et
une variable aléatoire et  un réel. Montrer que
un réel. Montrer que  et
et 
 et
et  deux variables aléatoires indépendantes. Montrer que
deux variables aléatoires indépendantes. Montrer que  .
. . Montrer que
. Montrer que 
 mesures entachées de bruits gaussiens d'une quantité fixe
mesures entachées de bruits gaussiens d'une quantité fixe  . Plus précisément, la mesure numéro
. Plus précisément, la mesure numéro  est modélisée par une variable aléatoire
est modélisée par une variable aléatoire  où
où  est un bruit gaussien de moyenne nulle et de variance
est un bruit gaussien de moyenne nulle et de variance  . On suppose que les mesures sont indépendantes, ce qui implique en particulier que
. On suppose que les mesures sont indépendantes, ce qui implique en particulier que  pour
pour  . Pour obtenir une estimation de
. Pour obtenir une estimation de  , on fait la moyenne empirique des expériences, c'est à dire
, on fait la moyenne empirique des expériences, c'est à dire  . Montrer que
. Montrer que  et
et 
 augmente-t-elle avec le nombre de mesures ?
augmente-t-elle avec le nombre de mesures ?  est un outil commode pour étudier le comportement de plusieurs variables gaussiennes. Considérons d'abord une famille de
est un outil commode pour étudier le comportement de plusieurs variables gaussiennes. Considérons d'abord une famille de  variables aléatoires gaussiennes indépendantes
variables aléatoires gaussiennes indépendantes  , de moyenne nulle et de variance unité. On forme la quantité
, de moyenne nulle et de variance unité. On forme la quantité  . Comme les
. Comme les  sont des variables aléatoires, les
sont des variables aléatoires, les  le sont aussi. La somme de variables alétoires étant toujours une variable alétoire,
le sont aussi. La somme de variables alétoires étant toujours une variable alétoire,  suit une certaine loi de probabilité. Dans l'analogie avec un programme informatique, la variable alétoire
suit une certaine loi de probabilité. Dans l'analogie avec un programme informatique, la variable alétoire  se comporte comme un programme qui appelle
se comporte comme un programme qui appelle  programmes générant une variables gaussiennes, puis additionne leurs carrés. Elle est appelée loi du
programmes générant une variables gaussiennes, puis additionne leurs carrés. Elle est appelée loi du à m degrés de liberté. On peut montrer qu'en moyenne une variable gaussienne au carré
à m degrés de liberté. On peut montrer qu'en moyenne une variable gaussienne au carré  a une moyenne de 1. En conséquence,
a une moyenne de 1. En conséquence,  vaudra typiquement
vaudra typiquement  .
.
 en sont une réalisation. Donc
en sont une réalisation. Donc  est une réalisation d'une loi du
est une réalisation d'une loi du  à
à  degrés de liberté. Si
degrés de liberté. Si  est de l'ordre de
est de l'ordre de  , le modèle est cohérent. Sinon, le modèle ou les paramètres ajustés sont à revoir.
, le modèle est cohérent. Sinon, le modèle ou les paramètres ajustés sont à revoir.
 ne sont évidemment pas de variance unité et parfois pas indépendantes. Par contre on peut à bon droit supposer qu'elles sont de moyenne nulle. Pour se ramener au cas précédent, on calcule non pas une réalisation de
ne sont évidemment pas de variance unité et parfois pas indépendantes. Par contre on peut à bon droit supposer qu'elles sont de moyenne nulle. Pour se ramener au cas précédent, on calcule non pas une réalisation de  mais de
mais de  où
où  ,
,  est sa transposée et
est sa transposée et  est la matrice des variances-covariances de
est la matrice des variances-covariances de  . Dans le cas où les
. Dans le cas où les  sont indépendantes, la matrice des variances-covariances est diagonale, son
sont indépendantes, la matrice des variances-covariances est diagonale, son  -ème terme diagonal étant
-ème terme diagonal étant  , soit l'inverse de la variance de
, soit l'inverse de la variance de  .
.
 , le modèle global
, le modèle global  est une variable aléatoire: il est somme d'une variable aléatoire valant
est une variable aléatoire: il est somme d'une variable aléatoire valant  avec une probabilité 1 et d'un vecteur de variables aléatoires gaussienne
avec une probabilité 1 et d'un vecteur de variables aléatoires gaussienne  . A ce titre, il a une certaine densité de probabilité que l'on note
. A ce titre, il a une certaine densité de probabilité que l'on note  . Le symbole | se lisant "sachant". La lettre L vient de Likelihood, qui veut dire vraisemblance en anglais. Il s'agit dans l'idée de la probabilité d'obtenir
. Le symbole | se lisant "sachant". La lettre L vient de Likelihood, qui veut dire vraisemblance en anglais. Il s'agit dans l'idée de la probabilité d'obtenir  pour une valeur de
pour une valeur de  donnée..
donnée..
 est souvent appelée "fonction de vraisemblance". La valeur de
est souvent appelée "fonction de vraisemblance". La valeur de  maximisant
maximisant  est appelé l'estimateur du maximum de vraisemblance. Il a de bonnes propritétés statistiques. En effet, on peut montrer que c'est un estimateur:
est appelé l'estimateur du maximum de vraisemblance. Il a de bonnes propritétés statistiques. En effet, on peut montrer que c'est un estimateur:

 sont des variables indépendantes, leur densité de probabilité jointe est égale au produit de leurs densité de probabilité.
sont des variables indépendantes, leur densité de probabilité jointe est égale au produit de leurs densité de probabilité.  où
où  est la densité de probabilité de la variable
est la densité de probabilité de la variable  . De plus, si ces varibles sont gaussiennes et indépendantes, on a:
. De plus, si ces varibles sont gaussiennes et indépendantes, on a: 
 puisque
puisque  est une fonction décroissante. La méthode consistant à minimiser
est une fonction décroissante. La méthode consistant à minimiser  s'appelle la méthode des moindres carrés. C'est la méthode d'estimation de loin la plus utilisée dans tous les domaines. Elle est parfois utilisée quand les bruits ne sont pas gaussiens, mais il faut garder à l'esprit qu'elle n'a alors plus de propriétés statistiques sympathiques (sauf quand le modèle est linéaire en
s'appelle la méthode des moindres carrés. C'est la méthode d'estimation de loin la plus utilisée dans tous les domaines. Elle est parfois utilisée quand les bruits ne sont pas gaussiens, mais il faut garder à l'esprit qu'elle n'a alors plus de propriétés statistiques sympathiques (sauf quand le modèle est linéaire en  .
.
 sont les éléments des orbites, les paramètres du bruit stellaire, du mouvement propre, etc. La fonction
sont les éléments des orbites, les paramètres du bruit stellaire, du mouvement propre, etc. La fonction  a donc de nombreux paramètres, et trouver son minimum global est une tâche ardue qui fait l'objet d'une littérature très vaste.
a donc de nombreux paramètres, et trouver son minimum global est une tâche ardue qui fait l'objet d'une littérature très vaste.
 i. e.
i. e.  où
où  est une certaine matrice dépendant des instants d'observation
est une certaine matrice dépendant des instants d'observation  , l'ajustement est beaucoup plus simple car il a une solution explicite (voir mini-projet). On essaye de se ramener autant que possible à des ajustements linéaires. La plupart du temps, on estime les paramètre les uns après les autres, puis un ajustement global est réalisé. Une démarche classique consiste à:
, l'ajustement est beaucoup plus simple car il a une solution explicite (voir mini-projet). On essaye de se ramener autant que possible à des ajustements linéaires. La plupart du temps, on estime les paramètre les uns après les autres, puis un ajustement global est réalisé. Une démarche classique consiste à:
 En vert signal après correction des bruits instrumentaux et atmosphériques
En vert signal après correction des bruits instrumentaux et atmosphériques  . Le mouvement propre (tendance linéaire) et la parallaxe (oscillation) dominent très nettement le signal.
. Le mouvement propre (tendance linéaire) et la parallaxe (oscillation) dominent très nettement le signal. . En rouge: signal estimé
. En rouge: signal estimé  en soustrayant le mouvement propre, l'accélération de perspective et la parallaxe au signal
en soustrayant le mouvement propre, l'accélération de perspective et la parallaxe au signal  .
. . En vert
. En vert  : orbite d'une planète ajustée sur
: orbite d'une planète ajustée sur  .
. : signal
: signal  dont on a soustrait
dont on a soustrait  . En vert
. En vert  :orbite d'une planète ajustée sur
:orbite d'une planète ajustée sur  .
. . En vert:
. En vert:  , ajustement de deux planètes en partant des estimations
, ajustement de deux planètes en partant des estimations  et
et  .
. . On ajuste tous les paramètres simultanément sur
. On ajuste tous les paramètres simultanément sur  en partant des estimations précédentes. Le signal en rouge représente le signal planétaire de cet ajustement.
en partant des estimations précédentes. Le signal en rouge représente le signal planétaire de cet ajustement.
 paramètres, où chacun d'eux peut prendre
paramètres, où chacun d'eux peut prendre  valeurs recquiert
valeurs recquiert  évaluations, ce qui devient rapidement ingérable numériquement. Les planètes ont un mouvement périodique, donc il est raisonnable de checher des signaux périodiques dans le signal en ne faisant varier que la période du signal recherché. Pour des signaux échantillonnés à intervalles réguliers, on utilise la transformée de Fourier. Le périodogramme est un moyen de checher des signaux périodiques dans des données échantillonnées irrégulièrement. On les notera
évaluations, ce qui devient rapidement ingérable numériquement. Les planètes ont un mouvement périodique, donc il est raisonnable de checher des signaux périodiques dans le signal en ne faisant varier que la période du signal recherché. Pour des signaux échantillonnés à intervalles réguliers, on utilise la transformée de Fourier. Le périodogramme est un moyen de checher des signaux périodiques dans des données échantillonnées irrégulièrement. On les notera  . Le périodogramme de Lomb-Scargle d'un signal
. Le périodogramme de Lomb-Scargle d'un signal  échantillonné aux instants
échantillonné aux instants  est défini comme suit pour une fréquence quelconque
est défini comme suit pour une fréquence quelconque  :
:
 où
où  vérifie:
vérifie:
 où
où  et
et  sont les paramètres minimisant
sont les paramètres minimisant  . Le modèle
. Le modèle  est linéaire en
est linéaire en  , on a donc une solution explicite à la minimisation.
, on a donc une solution explicite à la minimisation.
 de variance unité,
de variance unité,  une valeur réelle fixée et
une valeur réelle fixée et  une fréquence quelconque, la probabilité que
une fréquence quelconque, la probabilité que  dépasse
dépasse  est
est  . En d'autres termes, la probabilité qu'une valeur du périodogramme à
. En d'autres termes, la probabilité qu'une valeur du périodogramme à  fixée soit "au moins aussi grand que
fixée soit "au moins aussi grand que  " par hasard décroît exponentiellement. Supposons que l'on ait un signal
" par hasard décroît exponentiellement. Supposons que l'on ait un signal  où
où  est un bruit gaussien de variance unité et nous trouvons un pic de taille
est un bruit gaussien de variance unité et nous trouvons un pic de taille  , on calcule la probabilité de trouver un pic au moins aussi grand si le signal n'est composé que de bruit:
, on calcule la probabilité de trouver un pic au moins aussi grand si le signal n'est composé que de bruit:  . Si cette valeur est petite, on pourra confirmer la détection d'un signal avec une erreur de fausse alarme de
. Si cette valeur est petite, on pourra confirmer la détection d'un signal avec une erreur de fausse alarme de  . Ce procédé n'est autre qu'un test de signification statistique.
. Ce procédé n'est autre qu'un test de signification statistique.
 où
où  est la variance du bruit à la mesure
est la variance du bruit à la mesure  .
.
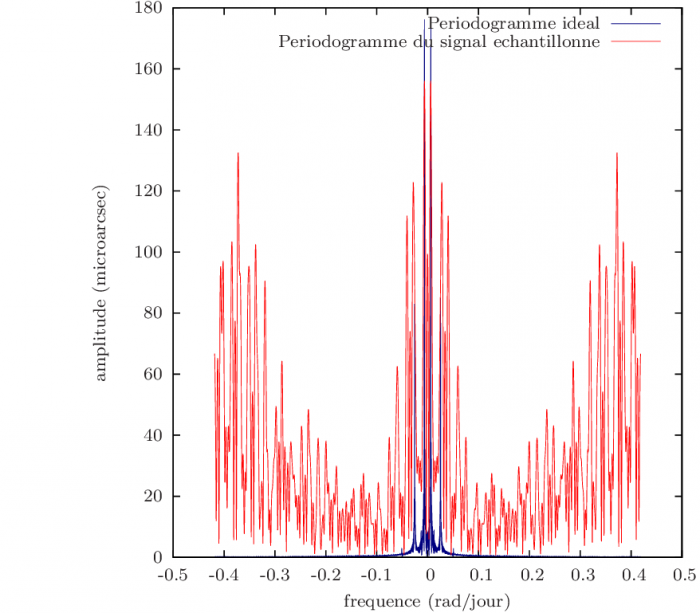
 et on considère une matrice réelle
et on considère une matrice réelle de taille
de taille  avec
avec  et de rang
et de rang  . On veut calculer
. On veut calculer  , minimisant
, minimisant  . On pose
. On pose  matrice diagonale dont les éléments diagonaux valent
matrice diagonale dont les éléments diagonaux valent  et
et  .
En termes vectoriels,
.
En termes vectoriels,  . Comme on veut trouver le minimum de
. Comme on veut trouver le minimum de  et que cette fonction est différentiable, ce minimum vérifie
et que cette fonction est différentiable, ce minimum vérifie  où
où  est la différentielle de
est la différentielle de  .
Montrer que la solution de
.
Montrer que la solution de  est
est  où
où  désigne la transposition. Montrer que c'est un minimum global. (On pourra utiliser le fait que
désigne la transposition. Montrer que c'est un minimum global. (On pourra utiliser le fait que  .
.
 au sens des moindres carrés. En d'autres termes, on veut ajuster
au sens des moindres carrés. En d'autres termes, on veut ajuster 
 où les
où les  sont des instants d'observation. Calculer avec la formule précédente
sont des instants d'observation. Calculer avec la formule précédente  minimisant
minimisant  . On notera
. On notera 
 pour une fréquence
pour une fréquence  donnée
donnée pour
pour  allant de 0 à
allant de 0 à 
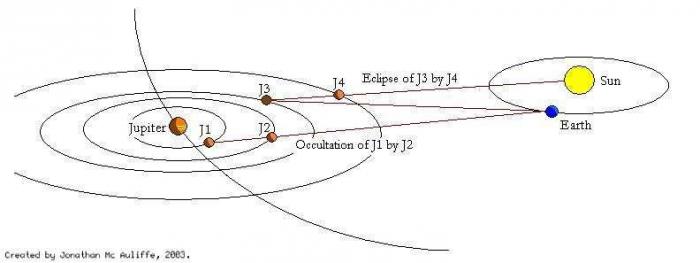

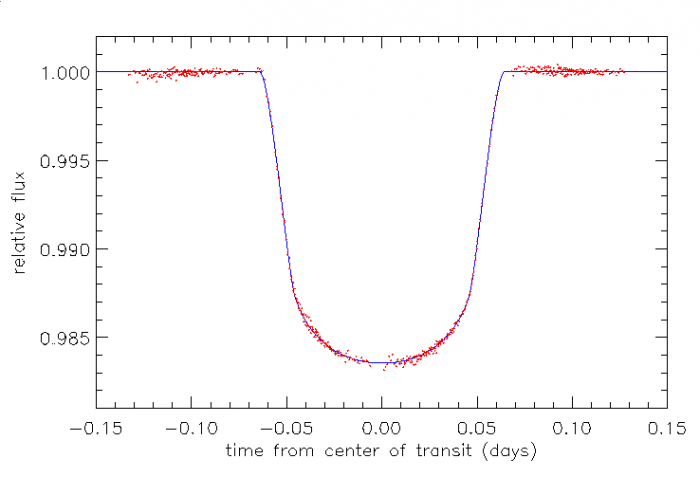
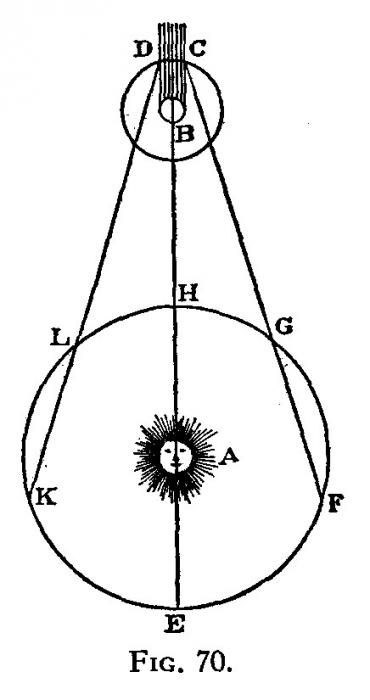
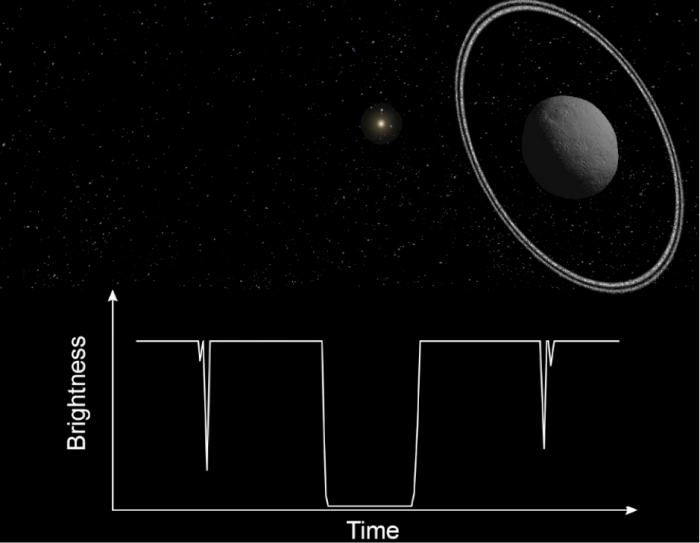
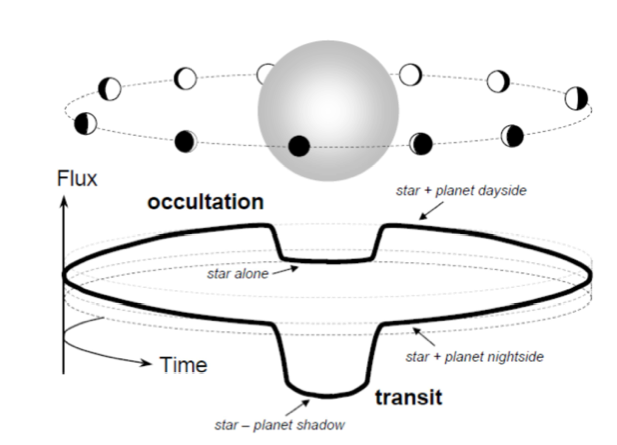
 et celui de la planète
et celui de la planète  . Pendant l'éclipse secondaire, le flux mesuré est restreint à
. Pendant l'éclipse secondaire, le flux mesuré est restreint à  .
.
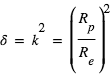 , où
, où  et
et  sont respectivement le rayon de l'étoile et de la planète. Le flux de lumière de l'étoile est réduit d'une fraction
sont respectivement le rayon de l'étoile et de la planète. Le flux de lumière de l'étoile est réduit d'une fraction  et Jupiter a un rayon de
et Jupiter a un rayon de  . La Terre a un rayon de
. La Terre a un rayon de  .
.
 , mais également du rapport de l’intensité lumineuse spécifique (i.e. pour une surface donnée) émise par les deux objets. Comme on le verra plus loin, il dépend de de la longueur d’onde, et selon celle-ci, des températures de la planète et de l’étoile, ou de l’albédo de la planète.
, mais également du rapport de l’intensité lumineuse spécifique (i.e. pour une surface donnée) émise par les deux objets. Comme on le verra plus loin, il dépend de de la longueur d’onde, et selon celle-ci, des températures de la planète et de l’étoile, ou de l’albédo de la planète.
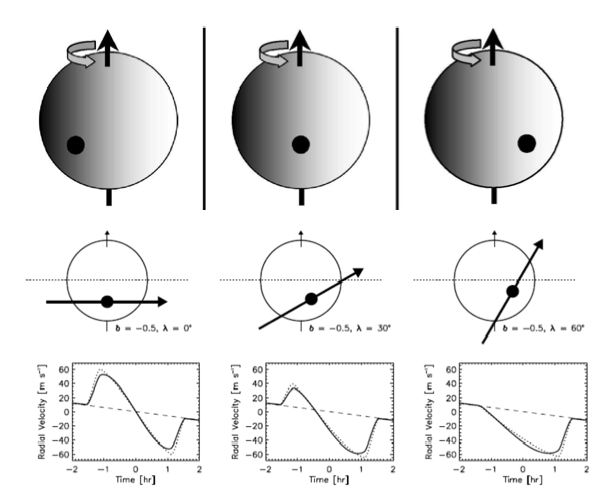
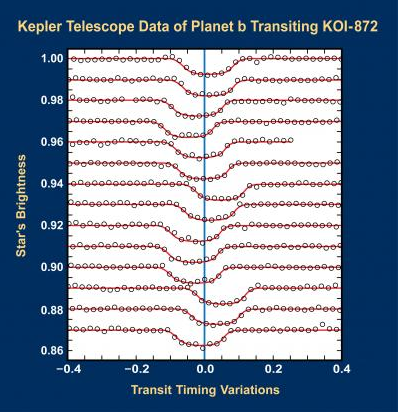
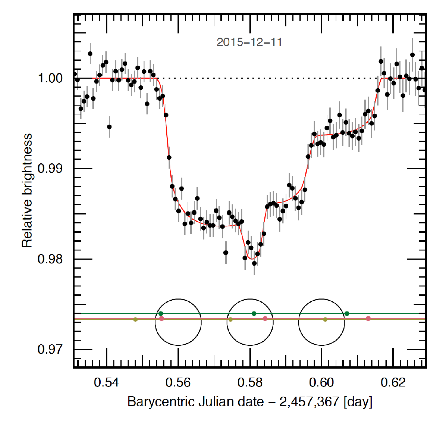
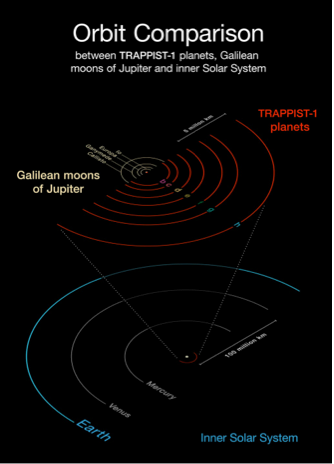
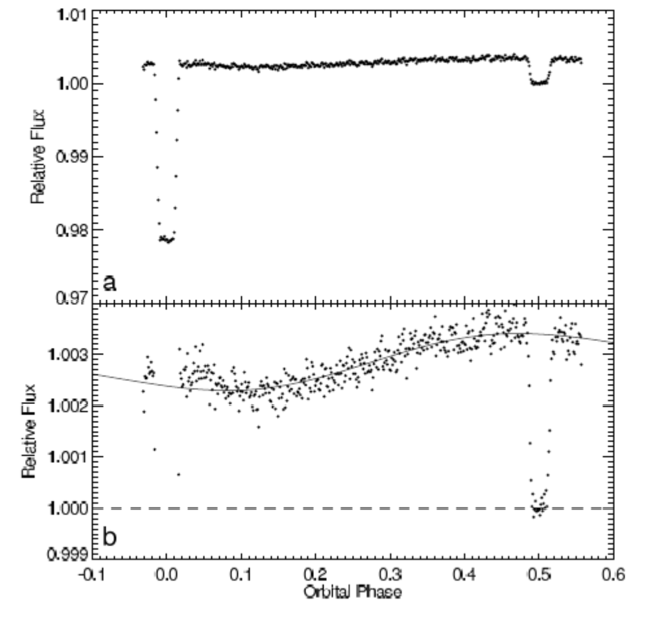
 de 1.0%. L'éclipse secondaire (phase 0.5) indique que le côté jour de la planète émet 0.3% du rayonnement stellaire à cette longueur d’onde, impliquant une température d’environ 1210 K. La figure du bas (zoom vertical de celle du haut) montre la courbe de phase. Après modélisation, celle-ci indique que la température du côté nuit est d’environ 970 K, « seulement » 240 K plus froid que sur le côté jour, ce qui implique une forte redistribution de la chaleur par la dynamique atmosphérique. D’après Knutson et al. 2007.
de 1.0%. L'éclipse secondaire (phase 0.5) indique que le côté jour de la planète émet 0.3% du rayonnement stellaire à cette longueur d’onde, impliquant une température d’environ 1210 K. La figure du bas (zoom vertical de celle du haut) montre la courbe de phase. Après modélisation, celle-ci indique que la température du côté nuit est d’environ 970 K, « seulement » 240 K plus froid que sur le côté jour, ce qui implique une forte redistribution de la chaleur par la dynamique atmosphérique. D’après Knutson et al. 2007.
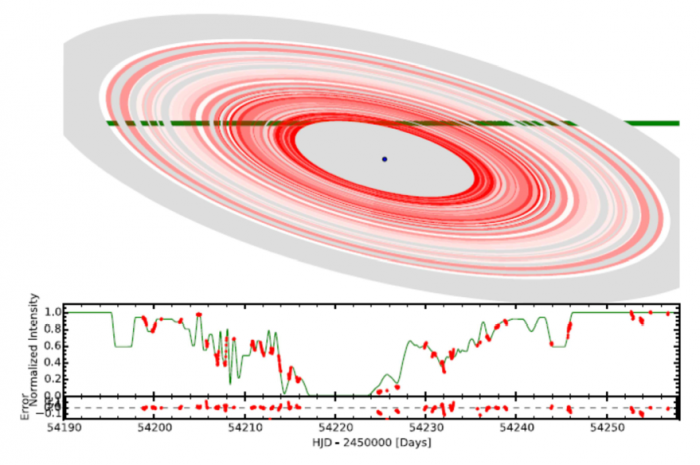
 l’inclinaison entre la normale au plan orbital et la ligne de visée, il faut que l’on ait la relation :
l’inclinaison entre la normale au plan orbital et la ligne de visée, il faut que l’on ait la relation :  , où
, où  et
et  sont les rayons de l'étoile et de la planète,
sont les rayons de l'étoile et de la planète,  est la distance projetée entre l’étoile et planète au moment où celle-ci est au plus proche de l’observateur. Compte tenu que la planète est toujours beaucoup plus petite que l’étoile, et en se limitant pour simplifier au cas d’une orbite circulaire de demi-grand axe a, on peut montrer que la probabilité de transit et celle d'éclipse secondaire sont toutes deux égales à
est la distance projetée entre l’étoile et planète au moment où celle-ci est au plus proche de l’observateur. Compte tenu que la planète est toujours beaucoup plus petite que l’étoile, et en se limitant pour simplifier au cas d’une orbite circulaire de demi-grand axe a, on peut montrer que la probabilité de transit et celle d'éclipse secondaire sont toutes deux égales à  . Ceci prouve le résultat intuitif que la probabilité de transit est plus grande pour les planètes les plus proches de leur étoile.
. Ceci prouve le résultat intuitif que la probabilité de transit est plus grande pour les planètes les plus proches de leur étoile.
 . L'orbite de la Terre a un rayon de
. L'orbite de la Terre a un rayon de  soit 1 U.A. (Unité Astronomique). L'orbite de Jupiter est à 5.2 U.A.
soit 1 U.A. (Unité Astronomique). L'orbite de Jupiter est à 5.2 U.A.

 . Par exemple, les « Jupiters chauds » ont une distance type à leur étoile de 0.05 UA, et concernent environ 1 % des étoiles. Ceci donne p
. Par exemple, les « Jupiters chauds » ont une distance type à leur étoile de 0.05 UA, et concernent environ 1 % des étoiles. Ceci donne p 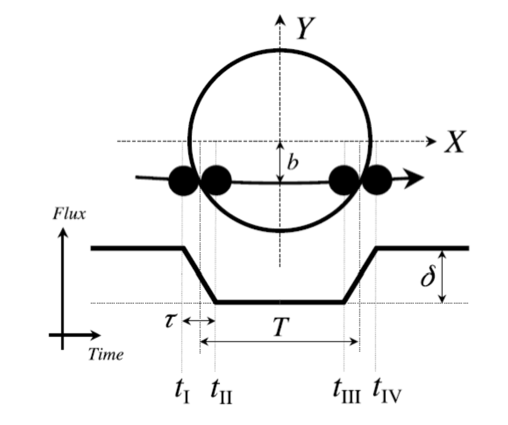
 à
à  les 4 « temps de contact », c’est-à-dire les instants auxquels les disques de la planète et de l’étoile sont tangents. L’instant moyen de l’entrée (du disque planétaire devant le disque stellaire) est
les 4 « temps de contact », c’est-à-dire les instants auxquels les disques de la planète et de l’étoile sont tangents. L’instant moyen de l’entrée (du disque planétaire devant le disque stellaire) est  ; de même l’instant moyen de la sortie (du disque planétaire) est
; de même l’instant moyen de la sortie (du disque planétaire) est  . L’intervalle de temps séparant ces deux instants, noté T, est par définition la « durée du transit », alors que
. L’intervalle de temps séparant ces deux instants, noté T, est par définition la « durée du transit », alors que  et
et  sont respectivement la durée de l’entrée et de la sortie. On note également b le « paramètre d’impact », i.e. la distance minimale – exprimée en fraction de rayon stellaire – entre la position apparente de la planète et le centre de l’étoile.
sont respectivement la durée de l’entrée et de la sortie. On note également b le « paramètre d’impact », i.e. la distance minimale – exprimée en fraction de rayon stellaire – entre la position apparente de la planète et le centre de l’étoile.
 , et
, et  (transit non-rasant), on peut montrer que la durée du transit est égale à :
(transit non-rasant), on peut montrer que la durée du transit est égale à :
 où
où  , P étant la période orbitale.
, P étant la période orbitale.
 , où
, où  En combinant l’expression de
En combinant l’expression de  ci-dessus avec la 3eme loi de Kepler, et en se ramenant au cas du système solaire, on obtient
ci-dessus avec la 3eme loi de Kepler, et en se ramenant au cas du système solaire, on obtient  expression dans laquelle la seconde parenthèse représente le rapport de la densité de l’étoile à celle du Soleil. Ainsi, vu depuis une autre étoile, le transit de la Terre devant le Soleil ne dure que 13 h une fois tous les ans, et celui de Jupiter ne dure que 30 h une fois tous les douze ans, ce qui illustre à nouveau la rareté du phénomène. Bien évidemment, la mesure de la période requiert l’observation d’au moins deux transits.
expression dans laquelle la seconde parenthèse représente le rapport de la densité de l’étoile à celle du Soleil. Ainsi, vu depuis une autre étoile, le transit de la Terre devant le Soleil ne dure que 13 h une fois tous les ans, et celui de Jupiter ne dure que 30 h une fois tous les douze ans, ce qui illustre à nouveau la rareté du phénomène. Bien évidemment, la mesure de la période requiert l’observation d’au moins deux transits.
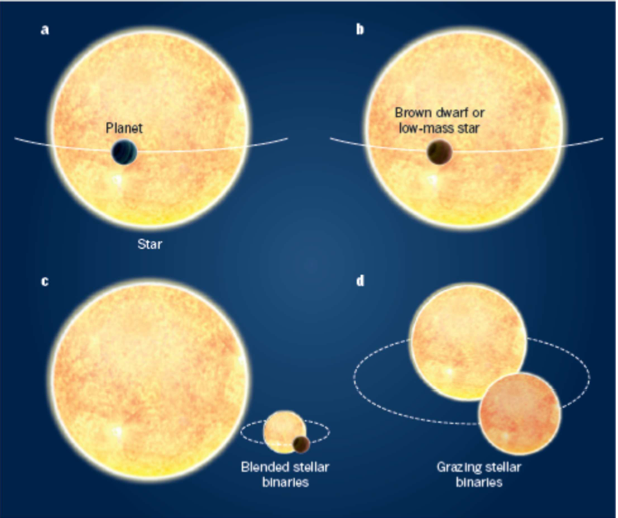
 sur l’étoile est relié à la masse planétaire par :
sur l’étoile est relié à la masse planétaire par :
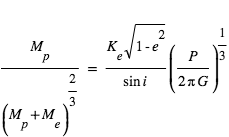 où
où  et
et  sont la masse planétaire et stellaire, e l’excentricité, P la période, et G la constante universelle de gravitation. L’avantage ici est qu’on peut écrire
sont la masse planétaire et stellaire, e l’excentricité, P la période, et G la constante universelle de gravitation. L’avantage ici est qu’on peut écrire  .
.

 n’est pas connue. Il faut donc combiner les mesures de transit et de vitesse radiale avec des informations indépendantes sur l’étoile, typiquement obtenues via les modèles d’évolution stellaire, qui donnent des relations entre âge, luminosité, rayon, masse et composition.
n’est pas connue. Il faut donc combiner les mesures de transit et de vitesse radiale avec des informations indépendantes sur l’étoile, typiquement obtenues via les modèles d’évolution stellaire, qui donnent des relations entre âge, luminosité, rayon, masse et composition.
 , la durée du transit T et la durée de l’ingress/egress contraignent le rapport
, la durée du transit T et la durée de l’ingress/egress contraignent le rapport  et le paramètre d’impact b, ce qui permet de « calibrer » le rayon planétaire en absolu. Si les propriétés stellaires sont suffisamment bien connues, on peut donc obtenir des valeurs absolues du rayon et de la masse planétaire, donc de sa densité, ce qui a évidemment une importance énorme pour contraindre la nature (gazeuse, glacée, rocheuse) et la structure interne de la planète.
et le paramètre d’impact b, ce qui permet de « calibrer » le rayon planétaire en absolu. Si les propriétés stellaires sont suffisamment bien connues, on peut donc obtenir des valeurs absolues du rayon et de la masse planétaire, donc de sa densité, ce qui a évidemment une importance énorme pour contraindre la nature (gazeuse, glacée, rocheuse) et la structure interne de la planète.
 indépendamment des propriétés de l’étoile :
indépendamment des propriétés de l’étoile :
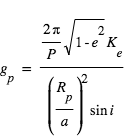 La connaissance de
La connaissance de  est nécessaire pour l’élaboration de modèles d’atmosphères.
est nécessaire pour l’élaboration de modèles d’atmosphères.
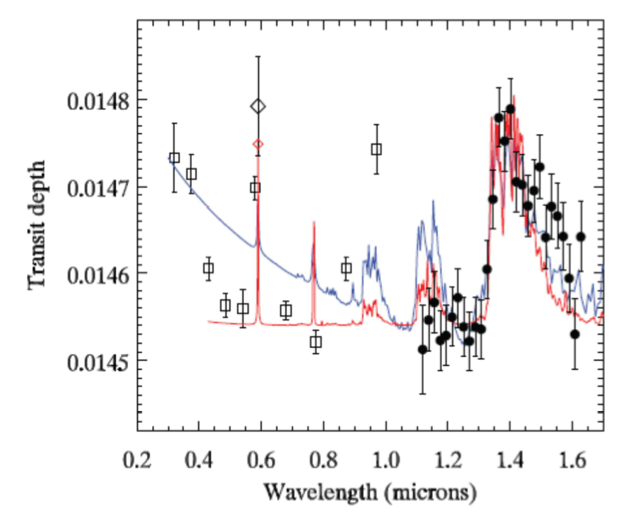
 , où H est la hauteur d’échelle de l’atmosphère et
, où H est la hauteur d’échelle de l’atmosphère et 
 ,
,  , masse moléculaire = 2 amu (
, masse moléculaire = 2 amu ( ),
),  ), on obtient
), on obtient  , ce qui fait
, ce qui fait  en adoptant
en adoptant  . Pour une "Terre" (
. Pour une "Terre" ( ,
,  , masse moléculaire = 28 amu (
, masse moléculaire = 28 amu ( ),
),  ), on trouve
), on trouve  et
et  , en prenant toujours
, en prenant toujours  .
.
 est donc inférieur à
est donc inférieur à  , ce qui illustre l’extrême difficulté de ce type de mesures.
, ce qui illustre l’extrême difficulté de ce type de mesures.
 la section efficace d’absorption à la longueur d’onde
la section efficace d’absorption à la longueur d’onde  , où
, où  est la concentration de l’espèce absorbante à l’altitude z. Comme le transit sonde les couches au limbe, l’opacité le long de la ligne de visée est multipliée par le facteur géométrique d’augmentation du parcours
est la concentration de l’espèce absorbante à l’altitude z. Comme le transit sonde les couches au limbe, l’opacité le long de la ligne de visée est multipliée par le facteur géométrique d’augmentation du parcours  , et vaut donc :
, et vaut donc :  On peut montrer que le rayon planétaire effectif à la longueur d’onde
On peut montrer que le rayon planétaire effectif à la longueur d’onde  pour laquelle l’opacité en visée horizontale vaut environ 0.56 :
pour laquelle l’opacité en visée horizontale vaut environ 0.56 :  Comme
Comme  est relié à la concentration
est relié à la concentration  à la surface, selon
à la surface, selon  , on peut en déduire
, on peut en déduire
 ce qui confirme que l’augmentation du rayon effectif est essentiellement proportionnelle à H (le terme dans le ln variant lentement avec H).
ce qui confirme que l’augmentation du rayon effectif est essentiellement proportionnelle à H (le terme dans le ln variant lentement avec H).
 Si l’on connaît le mécanisme physique responsable de l’absorption (par exemple, la diffusion Rayleigh où
Si l’on connaît le mécanisme physique responsable de l’absorption (par exemple, la diffusion Rayleigh où  , donc une estimation de sa composition principale si la température peut être estimée indépendamment.
, donc une estimation de sa composition principale si la température peut être estimée indépendamment.
 où
où  et
et  sont les intensités (par élément de surface) émises par la planète et l’étoile et
sont les intensités (par élément de surface) émises par la planète et l’étoile et  est le rapport des rayons
est le rapport des rayons  .
.
 du rayonnement
du rayonnement  de l’étoile, et en réémet une fraction
de l’étoile, et en réémet une fraction  où
où  est appelé l’albédo géométrique. Ceci correspond donc à une profondeur de l'éclipse secondaire égale à :
est appelé l’albédo géométrique. Ceci correspond donc à une profondeur de l'éclipse secondaire égale à :  .
.
 (et peut être <<1) et que
(et peut être <<1) et que  (et normalement
(et normalement  ), ceci implique le résultat intuitif que l'éclipse secondaire est (beaucoup) moins profonde que le transit primaire. Pour un albédo caractéristique de 10%, la profondeur de l'éclipse secondaire dans la composante stellaire réfléchie est de
), ceci implique le résultat intuitif que l'éclipse secondaire est (beaucoup) moins profonde que le transit primaire. Pour un albédo caractéristique de 10%, la profondeur de l'éclipse secondaire dans la composante stellaire réfléchie est de  pour un Jupiter chaud à 0.05 UA (contre 0,01 pour le transit). Pour une Terre à 1 UA de même albédo, elle vaudrait
pour un Jupiter chaud à 0.05 UA (contre 0,01 pour le transit). Pour une Terre à 1 UA de même albédo, elle vaudrait  ! Si elles sont complètement hors de portée dans ce dernier cas, les mesures d’albédo sont possibles pour des Jupiters chauds (voir plus loin les
! Si elles sont complètement hors de portée dans ce dernier cas, les mesures d’albédo sont possibles pour des Jupiters chauds (voir plus loin les  s’écrit comme le rapport des fonctions de Planck aux températures caractéristiques de la planète
s’écrit comme le rapport des fonctions de Planck aux températures caractéristiques de la planète  et de l’étoile
et de l’étoile  . Dans la limite des grandes longueurs d’onde, il tend vers le rapport
. Dans la limite des grandes longueurs d’onde, il tend vers le rapport  . Pour un Jupiter chaud (
. Pour un Jupiter chaud ( ) autour d’une étoile de type solaire, ce terme n’est plus pénalisant que d’un facteur
) autour d’une étoile de type solaire, ce terme n’est plus pénalisant que d’un facteur  à
à  ). Ceci explique l’allure des courbes d'éclipse les plus favorables (cf. Fig. 3). Dans ce cas, il devient envisageable d’effectuer la spectroscopie de l’émission thermique.
). Ceci explique l’allure des courbes d'éclipse les plus favorables (cf. Fig. 3). Dans ce cas, il devient envisageable d’effectuer la spectroscopie de l’émission thermique.
 où
où  est l’intensité lumineuse sortante à la longueur d'onde
est l’intensité lumineuse sortante à la longueur d'onde  est la fonction de Planck à la température
est la fonction de Planck à la température  du niveau atmosphérique d’opacité
du niveau atmosphérique d’opacité  , et où l’intégrale porte sur l’ensemble de l’atmosphère. Essentiellement, l’information sur le profil de température est contenue dans la fonction de Planck, alors que le profil vertical d’opacité contraint la composition chimique.
, et où l’intégrale porte sur l’ensemble de l’atmosphère. Essentiellement, l’information sur le profil de température est contenue dans la fonction de Planck, alors que le profil vertical d’opacité contraint la composition chimique.
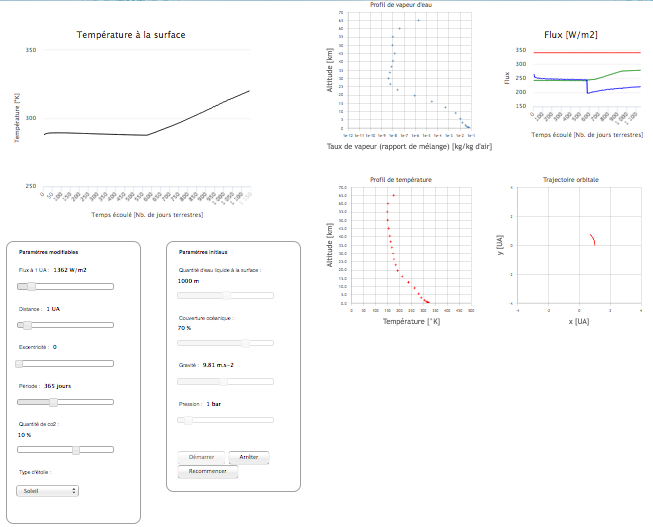
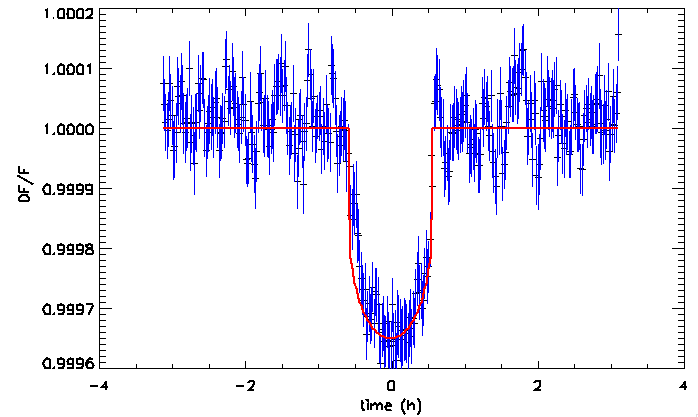

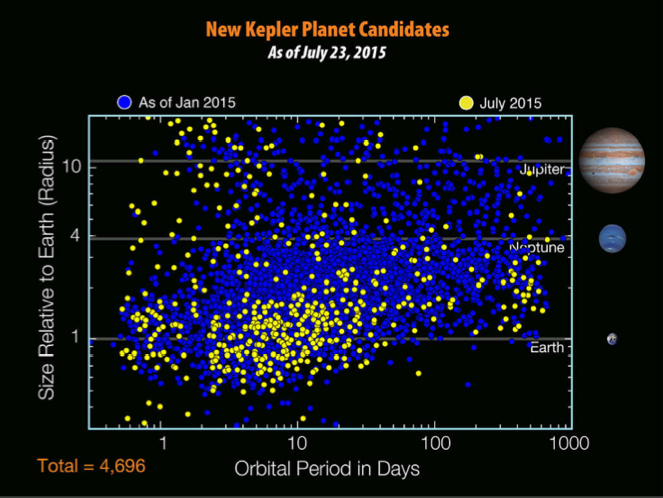
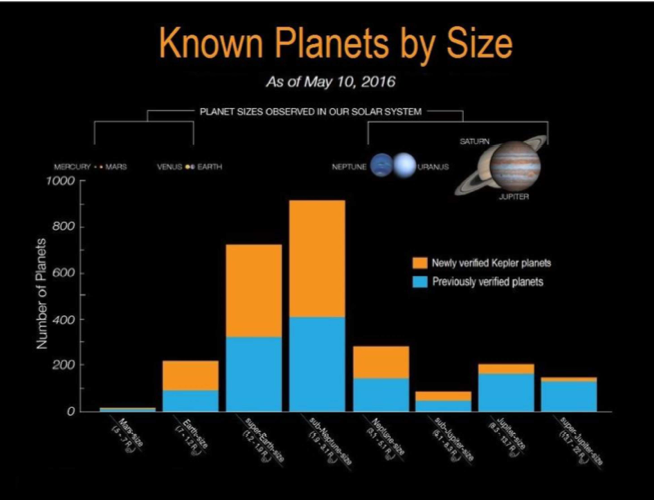
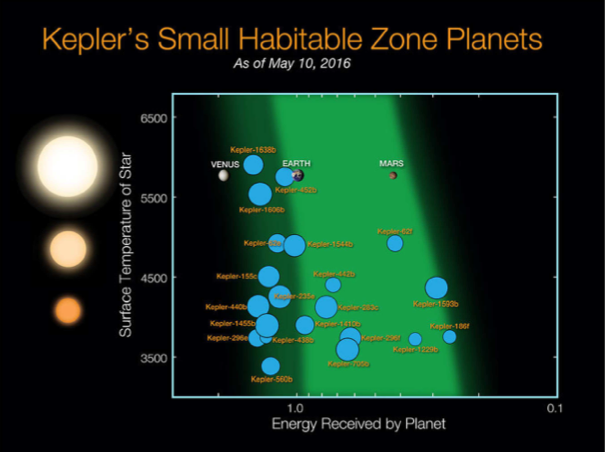
 est la vitesse radiale de l'étoile
est la vitesse radiale de l'étoile est la vitesse radiale du centre de gravité du système
est la vitesse radiale du centre de gravité du système est la demi-amplitude de la sinusoïde
est la demi-amplitude de la sinusoïde est le temps en Jours Julien
est le temps en Jours Julien est la période de révolution de la planète autour de l'étoile
est la période de révolution de la planète autour de l'étoile est la phase
est la phase
 , puis
, puis  .
.

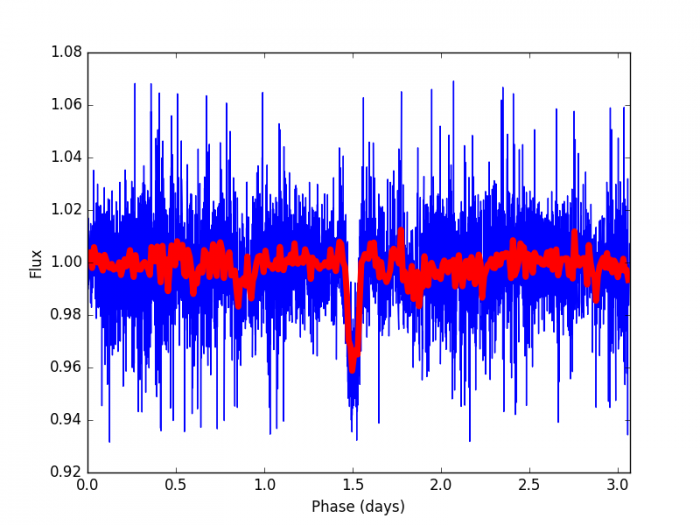
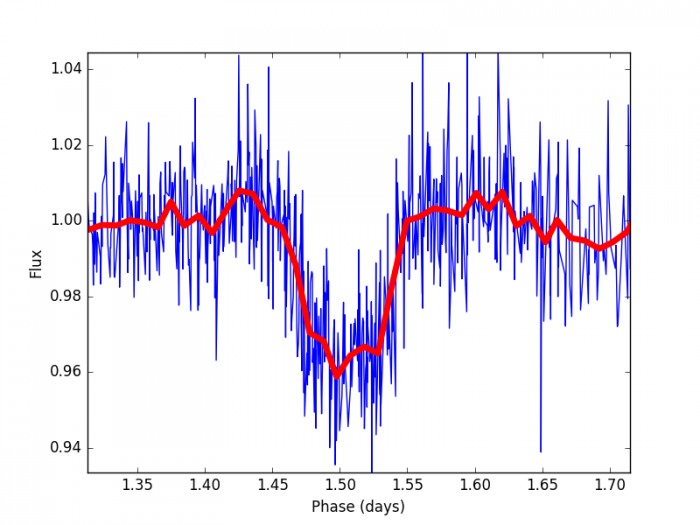

 , que
, que  , où
, où  est la magnitude absolue de l'étoile
est la magnitude absolue de l'étoile  (i.e. la magnitude qu'aurait cette étoile si elle était à 10pc) et enfin que la magnitude absolue
(i.e. la magnitude qu'aurait cette étoile si elle était à 10pc) et enfin que la magnitude absolue  et la magnitude visuelle,
et la magnitude visuelle,  sont liées à la distance
sont liées à la distance  par
par 
 ou
ou  .
.
 , que l'on utilisera par la suite pour comparer à leurs résultats.
, que l'on utilisera par la suite pour comparer à leurs résultats.
 , la période et le demi-grand axe sont très proches des valeurs originelles.
, la période et le demi-grand axe sont très proches des valeurs originelles.
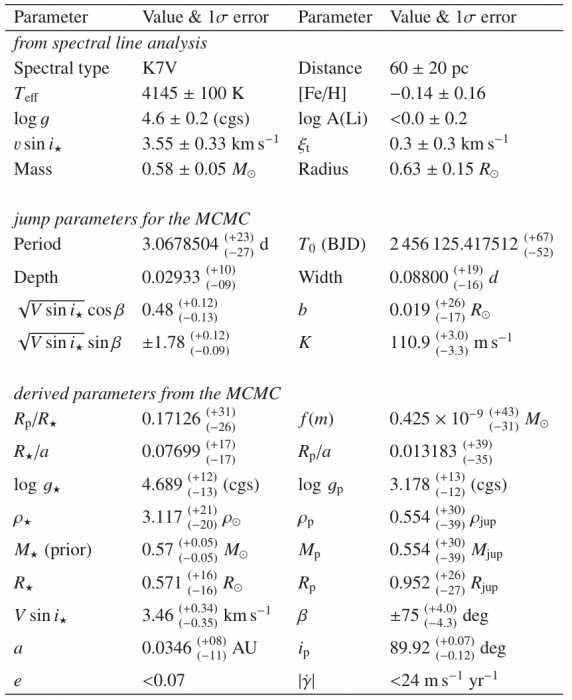

 , qu'on appelle pas spatial. De même, deux instants consécutifs sont espacés d'une durée
, qu'on appelle pas spatial. De même, deux instants consécutifs sont espacés d'une durée  , qu'on appelle pas de temps.
On souhaite discrétiser sur cette grille un champ
, qu'on appelle pas de temps.
On souhaite discrétiser sur cette grille un champ  qui est solution de l'équation d'advection :
qui est solution de l'équation d'advection :  , avec
, avec  ayant la dimension d'une vitesse.
Pour procéder, on discrétise la variable
ayant la dimension d'une vitesse.
Pour procéder, on discrétise la variable  en un champ
en un champ  sur la grille, dont la valeur au j-ième point de la grille au n-ième instant t est notée
sur la grille, dont la valeur au j-ième point de la grille au n-ième instant t est notée  .
.
 . Cette forme s'appelle un schéma amont.
. Cette forme s'appelle un schéma amont.
 .
.
 va tendre vers le champ analytique
va tendre vers le champ analytique  lorsque
lorsque  et
et  tendent vers zéro.
La deuxième question est de savoir à quel point la solution obtenue sera une approximation de la solution analytique. La manière de discrétiser puis utiliser une équation est une discipline en soi et il serait vain de vouloir introduire le sujet ici. Il faut juste garder à l'esprit qu'un GCM est un ensemble d'équations discrétisées, et par conséquent une approximation de la réalité. Cette approximation n'est pas du tout rédhibitoire et n'est pas le principal contributeur d'erreur d'un GCM. Toutefois, la discrétisation impose une règle forte sur le dimensionnement du GCM.
tendent vers zéro.
La deuxième question est de savoir à quel point la solution obtenue sera une approximation de la solution analytique. La manière de discrétiser puis utiliser une équation est une discipline en soi et il serait vain de vouloir introduire le sujet ici. Il faut juste garder à l'esprit qu'un GCM est un ensemble d'équations discrétisées, et par conséquent une approximation de la réalité. Cette approximation n'est pas du tout rédhibitoire et n'est pas le principal contributeur d'erreur d'un GCM. Toutefois, la discrétisation impose une règle forte sur le dimensionnement du GCM.
 avec
avec  la vitesse maximale,
la vitesse maximale,  le pas de temps et
le pas de temps et  le pas d'espace.
Cette condition stipule que dans un cas simple ce nombre ne doit pas dépasser 1. Autrement dit, on choisit les pas de temps et d'espace tels qu'aucune particule d'air ne traverse plus d'une parcelle géométrique en un pas de temps. En pratique, l'utilisation de plusieurs équations dans un modèle, ainsi que l'utilisation de techniques de discrétisation plus poussées, font que cette simple condition n'est pas la seule à prendre en compte. Toutefois, cette condition demeure une limite forte et on aura toujours
le pas d'espace.
Cette condition stipule que dans un cas simple ce nombre ne doit pas dépasser 1. Autrement dit, on choisit les pas de temps et d'espace tels qu'aucune particule d'air ne traverse plus d'une parcelle géométrique en un pas de temps. En pratique, l'utilisation de plusieurs équations dans un modèle, ainsi que l'utilisation de techniques de discrétisation plus poussées, font que cette simple condition n'est pas la seule à prendre en compte. Toutefois, cette condition demeure une limite forte et on aura toujours  dans un GCM.
dans un GCM.
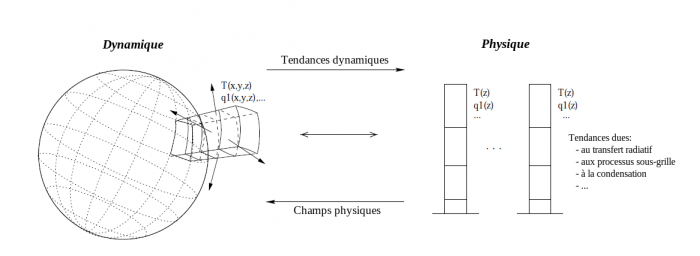
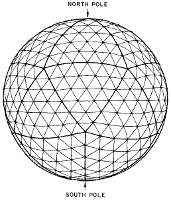
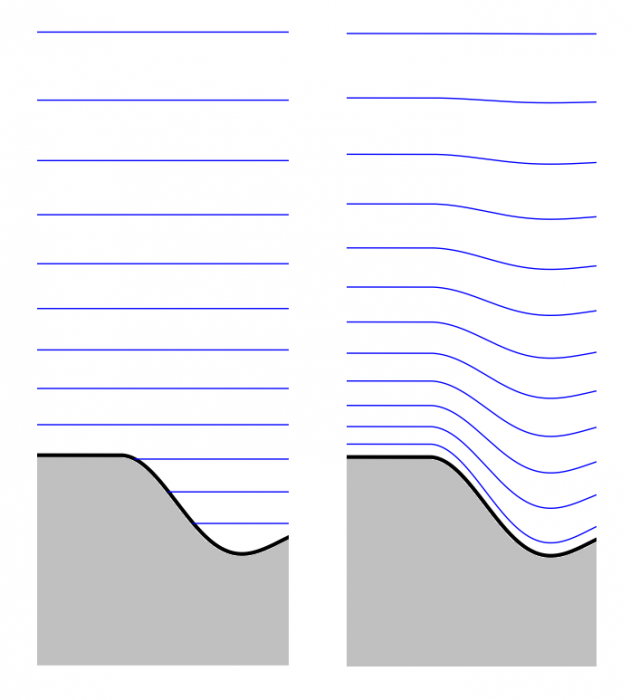
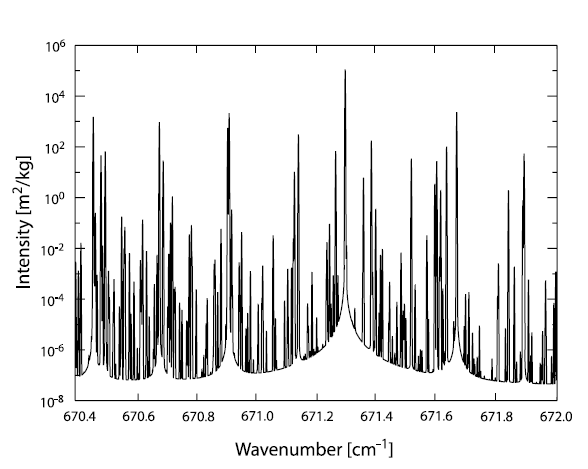
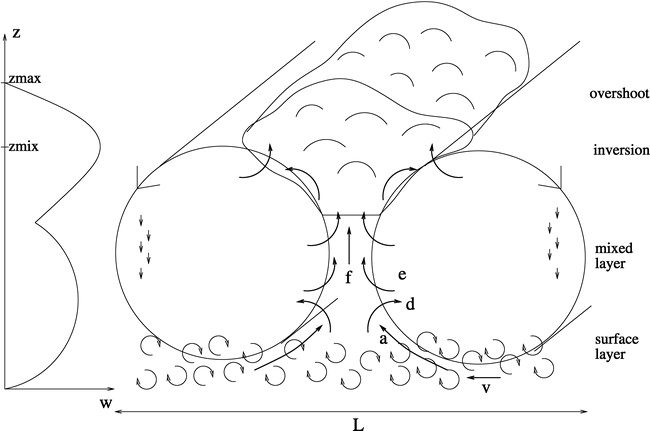

![C \frac{\partial T}{\partial t} = \frac{\partial}{\partial z} \left[ \lambda \frac{\partial T}{\partial z} \right]](../pages_circulation-globale/equations_gcm-comprendre-physique/equation1.png) avec
avec  la capacité thermique volumique et
la capacité thermique volumique et  la conductivité thermique du matériau. On veut simuler au moyen d'un GCM une planète dont la surface est recouverte d'une épaisse couche de glace.
la conductivité thermique du matériau. On veut simuler au moyen d'un GCM une planète dont la surface est recouverte d'une épaisse couche de glace.
 une valeur de 2 J.cm-3.K-1 et pour
une valeur de 2 J.cm-3.K-1 et pour  une valeur de 2.4 W.m-1.K-1, et on supposera les propriétés de la glace constantes et homogènes sur toute la planète.
une valeur de 2.4 W.m-1.K-1, et on supposera les propriétés de la glace constantes et homogènes sur toute la planète.
 avec
avec  et
et  deux températures constantes et
deux températures constantes et  une pulsation...
une pulsation...
 avec
avec  et
et  des termes dépendant de
des termes dépendant de  ,
,  et
et 
 pour deux pulsations
pour deux pulsations  différentes
différentes
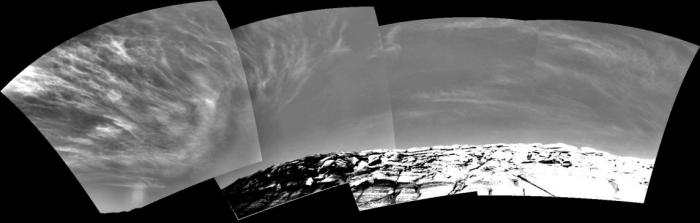
 . On utilise la formulation donnée par Held & Suarez, Bulletin of the American Meteorological Society, vol. 75 , N°10, Octobre 1994. Le terme correctif est :
. On utilise la formulation donnée par Held & Suarez, Bulletin of the American Meteorological Society, vol. 75 , N°10, Octobre 1994. Le terme correctif est :
 un coefficient de rappel dépendant de la latitude
un coefficient de rappel dépendant de la latitude  et de la coordonnée hybride
et de la coordonnée hybride  (où
(où  est la pression et
est la pression et  la pression de surface).
La loi pour
la pression de surface).
La loi pour  et
et  est :
est :
![T_{ref}(\theta,\sigma) = max \left[ 200, \left( 315 - 60\sin^2\theta -10 \ln (\sigma) \cos^2\theta \right) \sigma^\frac{2}{7}\right]](../pages_circulation-globale/equations_gcm-mini-projet/equation16.png)

 : comment varie-t-elle avec la latitude et l'altitude ?
: comment varie-t-elle avec la latitude et l'altitude ?
 ?
?
 : comment varie-t-il avec la latitude et l'altitude ?
: comment varie-t-il avec la latitude et l'altitude ?
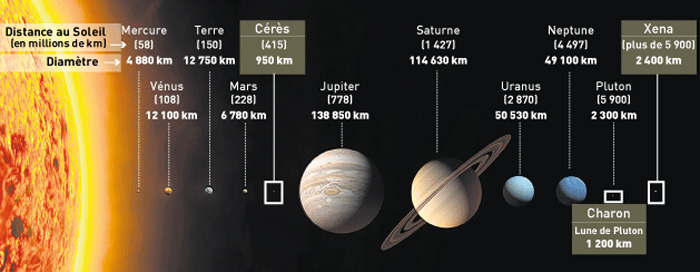

 et 47
et 47  ; la Terre faisant par comparaison
; la Terre faisant par comparaison 
 . Les masses sont données dans l'unité de la masse de Jupiter,
. Les masses sont données dans l'unité de la masse de Jupiter,  , qui fait
, qui fait  kg ou 317,8 masses terrestres . Ce premier critère statistique montre que la masse des planètes découvertes varie sur près de six ordres de grandeur. Cela ne prouve en aucun cas qu'il n'existe pas de planètes plus ou moins massives.
kg ou 317,8 masses terrestres . Ce premier critère statistique montre que la masse des planètes découvertes varie sur près de six ordres de grandeur. Cela ne prouve en aucun cas qu'il n'existe pas de planètes plus ou moins massives.
 , est impair la valeur de la
médiane est celle de la
, est impair la valeur de la
médiane est celle de la  ème masse. Si le nombre de masse est pair, la médiane se calcule par la moyenne de la
ème masse. Si le nombre de masse est pair, la médiane se calcule par la moyenne de la  et
et  ème masses. Dans le cas des 1795 exoplanètes découvertes, seules 1032 ont une masse mesurée ; un nombre pair, donc la médiane correspond à la moyenne des masses des exoplanètes numéros 1032/2 = 512 et (1032+1)/2 = 513 qui est la masse 0,96
ème masses. Dans le cas des 1795 exoplanètes découvertes, seules 1032 ont une masse mesurée ; un nombre pair, donc la médiane correspond à la moyenne des masses des exoplanètes numéros 1032/2 = 512 et (1032+1)/2 = 513 qui est la masse 0,96  .
.
 ) ou le dernier quart, nommée dernier quartile (2,75
) ou le dernier quart, nommée dernier quartile (2,75  ) de l'échantillon. Pour un échantillon de taille
) de l'échantillon. Pour un échantillon de taille  , le premier quartile se calcule en prenant la valeur
, le premier quartile se calcule en prenant la valeur  , si
, si  est un multiple de 4, ou la valeur de l'entier supérieur. Pour le dernier quartile, c'est la même méthode mais en utilisant
est un multiple de 4, ou la valeur de l'entier supérieur. Pour le dernier quartile, c'est la même méthode mais en utilisant  . L'écart entre le premier et le dernier quartile est nommé l'écart interquartile.
. L'écart entre le premier et le dernier quartile est nommé l'écart interquartile.
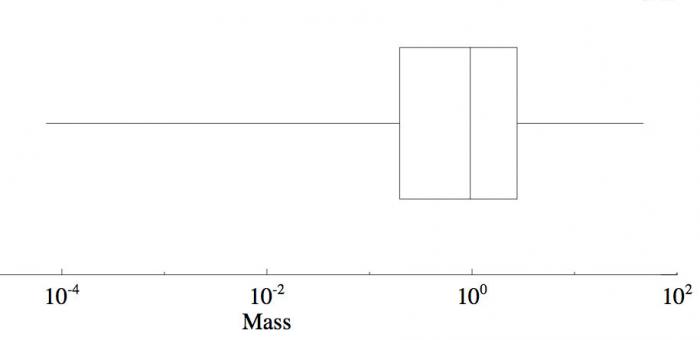
 pour un échantillon de taille
pour un échantillon de taille  est :
est :
 , très proche de la médiane à 2,75
, très proche de la médiane à 2,75  .
.
 qui se définit par la moyenne des distances à la valeur moyenne. Il faut donc calculer tout d'abord toutes les distances au carré (le carré pour avoir des distances positives), de la moyenne à chaque valeur de l'échantillon,
qui se définit par la moyenne des distances à la valeur moyenne. Il faut donc calculer tout d'abord toutes les distances au carré (le carré pour avoir des distances positives), de la moyenne à chaque valeur de l'échantillon,  . La moyenne de
. La moyenne de  donne le carré de
donne le carré de  :
:
 . Cela est presque deux fois plus grand que l'écart interquartile.
. Cela est presque deux fois plus grand que l'écart interquartile.
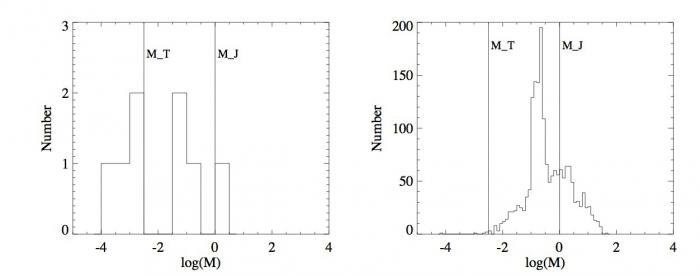
 est trop petite, il n'y aura qu'un ou bien zéro élément de l'échantillon dans chaque intervalle. A l'inverse si les intervalles sont trop grands, il ne sera plus possible de distinguer les pics dans la distribution. Un bon choix pour le nombre d'intervalles est important. Si, par exemple, on divise le nombre total d'éléments de l'échantillon par N = 10, et que la distribution est uniforme, chaque intervalle devrait avoir à peu près 10 représentants.
est trop petite, il n'y aura qu'un ou bien zéro élément de l'échantillon dans chaque intervalle. A l'inverse si les intervalles sont trop grands, il ne sera plus possible de distinguer les pics dans la distribution. Un bon choix pour le nombre d'intervalles est important. Si, par exemple, on divise le nombre total d'éléments de l'échantillon par N = 10, et que la distribution est uniforme, chaque intervalle devrait avoir à peu près 10 représentants.
 , la masse de la Terre, et
, la masse de la Terre, et  , la masse de Jupiter. L'histogramme des masses donne donc plus d'information que simplement une valeur centrale et une dispersion autour de cette valeur. Dans le cas de l'échantillon de toutes les masses connues des exoplanètes (figure de droite), l'histogramme montre que la répartition des exoplanètes a un pic aux alentours de
, la masse de Jupiter. L'histogramme des masses donne donc plus d'information que simplement une valeur centrale et une dispersion autour de cette valeur. Dans le cas de l'échantillon de toutes les masses connues des exoplanètes (figure de droite), l'histogramme montre que la répartition des exoplanètes a un pic aux alentours de  . De plus, le nombre d'exoplanètes avoisinant la masse de la Terre semble très faible. Encore une fois, cette propriété provient très probablement du biais observationnel qui privilégie les planètes massives et ne signifie en aucun cas que les planètes telluriques sont rares.
. De plus, le nombre d'exoplanètes avoisinant la masse de la Terre semble très faible. Encore une fois, cette propriété provient très probablement du biais observationnel qui privilégie les planètes massives et ne signifie en aucun cas que les planètes telluriques sont rares.
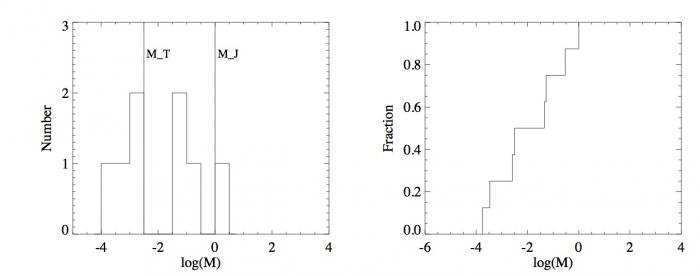
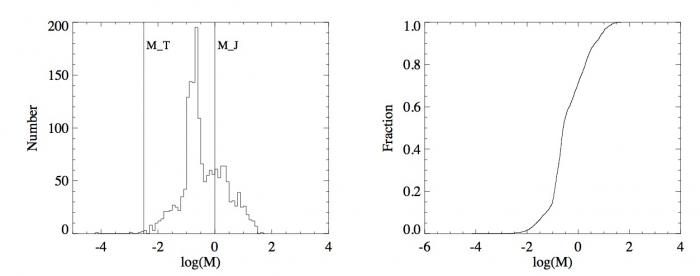
 . Elle ne peut donc dépasser 1. Dans notre cas, ce
nombre est le nombre total d'exoplanètes découvertes : 1032. Le grand avantage comparé à l'histogramme est qu'il n'existe qu'une fonction de distribution pour un échantillon, alors qu'il existe un grand nombre d'histogrammes du fait du choix de la taille de l'intervalle. La fonction de distribution est clairement définie et se trouve donc être très appréciée en théorie des probabilités. La fonction de distribution des masses des exoplanètes fournit, entre autres choses, le nombre d'exoplanètes ayant une masse inférieure à 1
. Elle ne peut donc dépasser 1. Dans notre cas, ce
nombre est le nombre total d'exoplanètes découvertes : 1032. Le grand avantage comparé à l'histogramme est qu'il n'existe qu'une fonction de distribution pour un échantillon, alors qu'il existe un grand nombre d'histogrammes du fait du choix de la taille de l'intervalle. La fonction de distribution est clairement définie et se trouve donc être très appréciée en théorie des probabilités. La fonction de distribution des masses des exoplanètes fournit, entre autres choses, le nombre d'exoplanètes ayant une masse inférieure à 1  ,
,  , ou à une masse terrestre,
, ou à une masse terrestre,  . La figure en bas à droite montre cette fonction.
. La figure en bas à droite montre cette fonction.
 du fait de la normalisation. Entre les deux valeurs, elle est constante. Cette fonction est par construction croissante. Les "créneaux" se distinguent bien pour des échantillons avec un faible nombre d'éléments comme avec les masses des planètes du système solaire mais presque plus lorsque ce nombre est grand pour les exoplanètes (voir figures de droite).
du fait de la normalisation. Entre les deux valeurs, elle est constante. Cette fonction est par construction croissante. Les "créneaux" se distinguent bien pour des échantillons avec un faible nombre d'éléments comme avec les masses des planètes du système solaire mais presque plus lorsque ce nombre est grand pour les exoplanètes (voir figures de droite).
 alors que celles des exoplanètes à
alors que celles des exoplanètes à  , bien qu'il y ait quelques traces d'exoplanètes en deçà de cette valeur. La pente globale de la fonction de distribution du système solaire semble régulière alors que celle des exoplanètes connaît une augmentation autour de la valeur 0,17
, bien qu'il y ait quelques traces d'exoplanètes en deçà de cette valeur. La pente globale de la fonction de distribution du système solaire semble régulière alors que celle des exoplanètes connaît une augmentation autour de la valeur 0,17  .
.
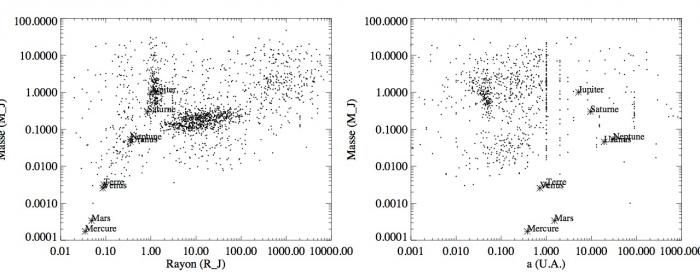
 , était constante, ce qui est faux dans notre système solaire, alors le rayon,
, était constante, ce qui est faux dans notre système solaire, alors le rayon,  , d'une exoplanète devrait être directement corrélé avec sa masse totale,
, d'une exoplanète devrait être directement corrélé avec sa masse totale,  , par la loi
, par la loi  . Un graphique ayant comme abscisse le rayon au cube et comme ordonnée la masse montrerait une droite qui permettrait de calculer
. Un graphique ayant comme abscisse le rayon au cube et comme ordonnée la masse montrerait une droite qui permettrait de calculer  , son coefficient directeur. Dans les faits, la densité des exoplanètes n'est pas constante.
, son coefficient directeur. Dans les faits, la densité des exoplanètes n'est pas constante.
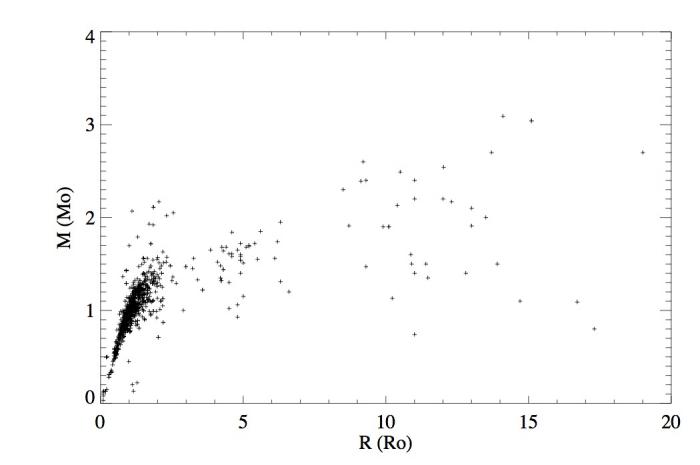
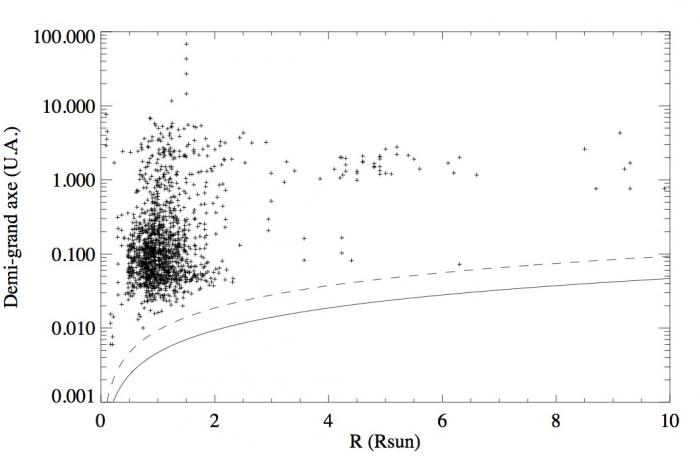
 , qui est le signal recherché. L'écart-type, qui est une estimation de son erreur absolue, vaudra alors
, qui est le signal recherché. L'écart-type, qui est une estimation de son erreur absolue, vaudra alors  ; ceci est une propriété de la loi de Poisson. Par exemple, si N vaut 10, son erreur absolue vaut
; ceci est une propriété de la loi de Poisson. Par exemple, si N vaut 10, son erreur absolue vaut  . Le rapport entre le signal, 10, et l'erreur appelé bruit, 3,16, vaut alors
. Le rapport entre le signal, 10, et l'erreur appelé bruit, 3,16, vaut alors
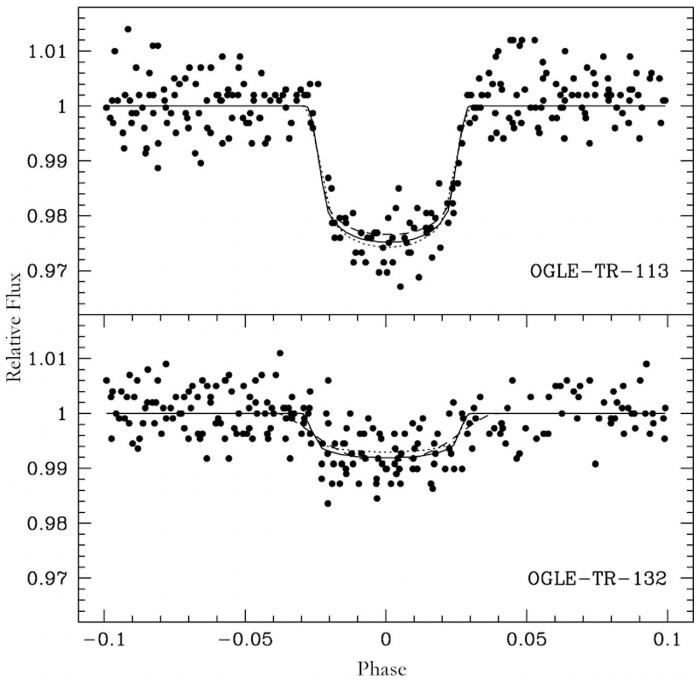
 , donne
, donne  et
et  . Cela signifie qu'il y a la même chance de tomber sur pile que sur face. Par contre si la pièce était faussée, il serait possible d'avoir une fonction de probabilité donnant :
. Cela signifie qu'il y a la même chance de tomber sur pile que sur face. Par contre si la pièce était faussée, il serait possible d'avoir une fonction de probabilité donnant :  et
et  . "pile" aurait alors 4 fois plus de chance de sortir.
. "pile" aurait alors 4 fois plus de chance de sortir.
 de 1 à 6,
de 1 à 6,  . Il y a en effet autant de chance de tirer un 1, un 2, etc. Cependant quelle est la probabilité de tirer un nombre pair, {2, 4, 6} ? Intuitivement, cette probabilité doit être plus grande que de tirer seulement un 2. Le bon sens et la construction de la théorie des probabilités impliquent qu'elle corresponde à la somme de chacune de leur probabilité. Donc
. Il y a en effet autant de chance de tirer un 1, un 2, etc. Cependant quelle est la probabilité de tirer un nombre pair, {2, 4, 6} ? Intuitivement, cette probabilité doit être plus grande que de tirer seulement un 2. Le bon sens et la construction de la théorie des probabilités impliquent qu'elle corresponde à la somme de chacune de leur probabilité. Donc  . Il en est de même pour la probabilité de tirer un nombre impair. Ce petit exemple illustre une loi simple de probabilité. La détermination de la probabilité d'un sous-ensemble est égale à la somme de la probabilité de chacun des événements du sous-ensemble.
. Il en est de même pour la probabilité de tirer un nombre impair. Ce petit exemple illustre une loi simple de probabilité. La détermination de la probabilité d'un sous-ensemble est égale à la somme de la probabilité de chacun des événements du sous-ensemble.
 26 = 1/2 car il y a 26 cartes rouges, la moitié du nombre des cartes. La probabilité de tirer une carte noire vaut aussi 1/2, quant à celle de tirer un coeur, elle vaut 1/4 et celle de tirer un roi 1/13. Quelle est alors la probabilité de tirer une carte rouge ou noire ? ou la probabilité de tirer une carte rouge ou de coeur ? ou encore une carte rouge ou un roi ? Pour la première probabilité, intuitivement le résultat est 1 car c'est l'ensemble univers. Cela revient à la somme des probabilités des sous-ensembles : 1/2+1/2. Pour la seconde, la probabilité reste celle de tirer une carte rouge, 1/2, car obligatoirement un coeur est une carte rouge. On n'additionne donc pas les probabilités. Le dernier cas est plus compliqué car deux rois font partie de l'ensemble des cartes rouges mais les deux autres non. Comment faire ? La relation donnant la solution générale est
26 = 1/2 car il y a 26 cartes rouges, la moitié du nombre des cartes. La probabilité de tirer une carte noire vaut aussi 1/2, quant à celle de tirer un coeur, elle vaut 1/4 et celle de tirer un roi 1/13. Quelle est alors la probabilité de tirer une carte rouge ou noire ? ou la probabilité de tirer une carte rouge ou de coeur ? ou encore une carte rouge ou un roi ? Pour la première probabilité, intuitivement le résultat est 1 car c'est l'ensemble univers. Cela revient à la somme des probabilités des sous-ensembles : 1/2+1/2. Pour la seconde, la probabilité reste celle de tirer une carte rouge, 1/2, car obligatoirement un coeur est une carte rouge. On n'additionne donc pas les probabilités. Le dernier cas est plus compliqué car deux rois font partie de l'ensemble des cartes rouges mais les deux autres non. Comment faire ? La relation donnant la solution générale est

 l'union de deux ensembles et
l'union de deux ensembles et  leur intersection. Vous pouvez vérifier que cela donne bien les résultats des deux premiers exemples. Dans le cas des rois, la probabilité est alors P(rouge
leur intersection. Vous pouvez vérifier que cela donne bien les résultats des deux premiers exemples. Dans le cas des rois, la probabilité est alors P(rouge  rois) = P(rouge) + P(rois) - P(rois
rois) = P(rouge) + P(rois) - P(rois  rouge). Il se trouve que l'ensemble {rois
rouge). Il se trouve que l'ensemble {rois  rouge} n'est formé que des deux rois rouges, donc sa probabilité est 2
rouge} n'est formé que des deux rois rouges, donc sa probabilité est 2  1/52 = 1/26. Le résultat est donc P(rois
1/52 = 1/26. Le résultat est donc P(rois  rouge) = 1/2 + 1/13 - 1/26 = 1/2 + 1/26 = 14/26.
rouge) = 1/2 + 1/13 - 1/26 = 1/2 + 1/26 = 14/26.
 B} = {}, donc si A et B sont disjoints, il suffit alors de sommer la probabilité de A et de B pour avoir celle de A
B} = {}, donc si A et B sont disjoints, il suffit alors de sommer la probabilité de A et de B pour avoir celle de A B car P({}) = 0.
B car P({}) = 0.
 . Cela est vrai pour un jet de dé ou de pièce non faussés, ou pour un jeu de cartes bien mélangé. Dans ce cas, la probabilité de tous les évènements, donc de l'ensemble univers, vaut P({E1, E2, E3, ..., En}) = P({E1}) + P({E2})+ P({E3})+ ... + P({En}) = p +p +p +...+p =
. Cela est vrai pour un jet de dé ou de pièce non faussés, ou pour un jeu de cartes bien mélangé. Dans ce cas, la probabilité de tous les évènements, donc de l'ensemble univers, vaut P({E1, E2, E3, ..., En}) = P({E1}) + P({E2})+ P({E3})+ ... + P({En}) = p +p +p +...+p =  car tous les ensembles d'évènements sont disjoints, c'est à dire pour tous
car tous les ensembles d'évènements sont disjoints, c'est à dire pour tous  et
et  , {
, {

 } = {}. Or la probabilité de l'ensemble univers vaut par définition 1. Donc
} = {}. Or la probabilité de l'ensemble univers vaut par définition 1. Donc  ce qui implique que
ce qui implique que  . Cela justifie pourquoi la probabilité pour le lancer d'une pièce vaut 1/2, pour le jet d'un dé vaut 1/6 et pour le tirage d'une carte dans un jeu de 52 cartes vaut 1/52.
. Cela justifie pourquoi la probabilité pour le lancer d'une pièce vaut 1/2, pour le jet d'un dé vaut 1/6 et pour le tirage d'une carte dans un jeu de 52 cartes vaut 1/52.
 et que, de même,
et que, de même,  donc que
donc que  .
.
 P(Blanche|Urne A)+P(Urne B)
P(Blanche|Urne A)+P(Urne B) P(Blanche|Urne B) = 0,5
P(Blanche|Urne B) = 0,5 9/10 + 0,5
9/10 + 0,5 1/10 = 0,5 car il est possible de tirer une boule blanche depuis l'urne A ou depuis l'urne B, mais pas avec la même probabilité. Ainsi, la probabilité que l'on soit en présence de l'urne A sachant que l'on a tiré une boule blanche est donnée par P(Urne A|Blanche) = P(Blanche|Urne A)
1/10 = 0,5 car il est possible de tirer une boule blanche depuis l'urne A ou depuis l'urne B, mais pas avec la même probabilité. Ainsi, la probabilité que l'on soit en présence de l'urne A sachant que l'on a tiré une boule blanche est donnée par P(Urne A|Blanche) = P(Blanche|Urne A) P(Urne A)/P(Blanche) = 9/10
P(Urne A)/P(Blanche) = 9/10 0,5/0,5 = 9/10. Dans l'autre cas P(Blanche|Urne B) = 1/10. Avec cette observation du tirage d'une boule blanche, on est passé d'une probabilité de 0,5 pour que l'urne étudiée soit l'urne A, à une probabilité de 9/10 pour que l'urne étudiée soit l'urne A.
0,5/0,5 = 9/10. Dans l'autre cas P(Blanche|Urne B) = 1/10. Avec cette observation du tirage d'une boule blanche, on est passé d'une probabilité de 0,5 pour que l'urne étudiée soit l'urne A, à une probabilité de 9/10 pour que l'urne étudiée soit l'urne A.
 . De manière similaire, elle se définit pour une variable continue
. De manière similaire, elle se définit pour une variable continue  :
:  où
où  et
et  sont les limites inférieures et supérieures que peut prendre la variable
sont les limites inférieures et supérieures que peut prendre la variable  .
.
 = 1
= 1 ), l'espérance est
), l'espérance est  . Moyenne et espérance se ressemblent beaucoup, cependant elle ont une différence. L'espérance est une valeur dans le cadre de la théorie des probabilités associée à une loi de probabilité. La moyenne est, quant à elle, le résultat d'une opération arithmétique sur un échantillon. La moyenne dépend donc de l'échantillon alors que l'espérance est théorique et donc unique pour une loi donnée. La moyenne calculée à partir d'un échantillon doit être proche de l'espérance mais pas forcément identique. Par exemple, lorsqu'un dé est tiré 10 fois et que la moyenne des résultats est faite, le résultat n'est pas forcément l'espérance de 3,5. De plus, si l'on refait 10 lancers la nouvelle moyenne ne sera pas forcément identique à la première. Cependant, d'après la loi des grands nombres, plus le nombre de lancers de dé sera grand, plus la moyenne s'approchera de l'espérance. L'espérance doit être vue comme la limite de la moyenne lorsque l'on fait tendre le nombre d'essais vers l'infini.
. Moyenne et espérance se ressemblent beaucoup, cependant elle ont une différence. L'espérance est une valeur dans le cadre de la théorie des probabilités associée à une loi de probabilité. La moyenne est, quant à elle, le résultat d'une opération arithmétique sur un échantillon. La moyenne dépend donc de l'échantillon alors que l'espérance est théorique et donc unique pour une loi donnée. La moyenne calculée à partir d'un échantillon doit être proche de l'espérance mais pas forcément identique. Par exemple, lorsqu'un dé est tiré 10 fois et que la moyenne des résultats est faite, le résultat n'est pas forcément l'espérance de 3,5. De plus, si l'on refait 10 lancers la nouvelle moyenne ne sera pas forcément identique à la première. Cependant, d'après la loi des grands nombres, plus le nombre de lancers de dé sera grand, plus la moyenne s'approchera de l'espérance. L'espérance doit être vue comme la limite de la moyenne lorsque l'on fait tendre le nombre d'essais vers l'infini.
 avec
avec  l'espérance. Dans le cas d'une variable continue,
l'espérance. Dans le cas d'une variable continue,  . On peut aussi définir la variance en n'utilisant que l'espérance de la variable
. On peut aussi définir la variance en n'utilisant que l'espérance de la variable  et
et  :
:  . La démonstration est demandée en exercice. L'écart-type, souvent noté
. La démonstration est demandée en exercice. L'écart-type, souvent noté  , est la racine carrée de la variance :
, est la racine carrée de la variance :  . De même que pour le couple espérance-moyenne, le terme variance s'utilise plutôt en probabilité et écart-type en statistique.
. De même que pour le couple espérance-moyenne, le terme variance s'utilise plutôt en probabilité et écart-type en statistique.
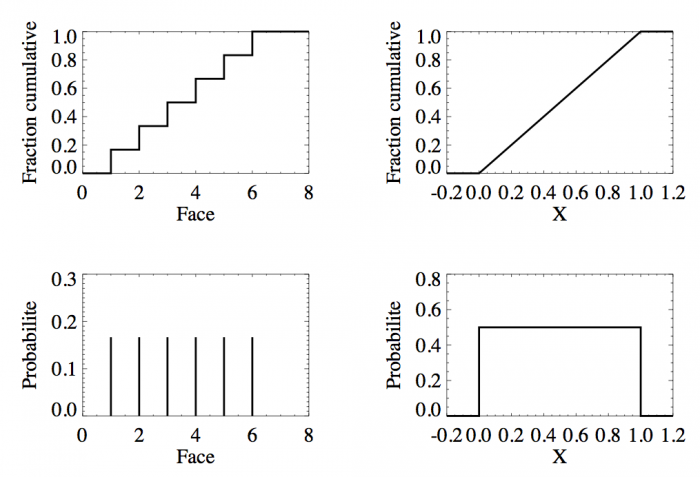
 , la fonction de distribution, notée
, la fonction de distribution, notée  , donne la probabilité d'avoir la variable
, donne la probabilité d'avoir la variable  strictement plus petite que
strictement plus petite que  :
:  . La fonction
. La fonction  est donc par définition une fonction croissante et bornée par la valeur 1. Cette définition convient aussi bien aux variables discrètes qu'aux variables continues. Il est aisé avec cette fonction de calculer la probabilité d'avoir la variable
est donc par définition une fonction croissante et bornée par la valeur 1. Cette définition convient aussi bien aux variables discrètes qu'aux variables continues. Il est aisé avec cette fonction de calculer la probabilité d'avoir la variable  entre
entre  et
et  . C'est tout simplement
. C'est tout simplement  . En conséquence, si la courbe est plate ou avec une pente faible entre deux points
. En conséquence, si la courbe est plate ou avec une pente faible entre deux points  et
et  , cela conduit à une probabilité entre
, cela conduit à une probabilité entre  et
et  faible alors que si la pente est forte la probabilité l'est aussi.
faible alors que si la pente est forte la probabilité l'est aussi.
 , la fonction est nulle, il est en effet impossible qu'un jet de dé puisse sortir un nombre plus petit que 1. De
, la fonction est nulle, il est en effet impossible qu'un jet de dé puisse sortir un nombre plus petit que 1. De  à
à  ,
,  est constante et vaut 1/6 qui est la probabilité d'avoir un 1 à un jet de dé. Ensuite entre 2 et 3 exclus, la fonction vaut
est constante et vaut 1/6 qui est la probabilité d'avoir un 1 à un jet de dé. Ensuite entre 2 et 3 exclus, la fonction vaut  ; cela correspond à la probabilité de sortir un 1 ou un 2. La fonction continue d'augmenter pour plafonner jusqu'à x>6 où elle atteint sa valeur maximale de 1 car il est certain qu'un dé sorte un chiffre plus petit ou égale à 6.
; cela correspond à la probabilité de sortir un 1 ou un 2. La fonction continue d'augmenter pour plafonner jusqu'à x>6 où elle atteint sa valeur maximale de 1 car il est certain qu'un dé sorte un chiffre plus petit ou égale à 6.
 ,
,  ] est identique. Cette fonction de distribution n'est autre que la fonction de distribution de la loi uniforme entre 0 et 1 ; chaque nombre entre 0 et 1 ayant la même chance d'être tiré.
] est identique. Cette fonction de distribution n'est autre que la fonction de distribution de la loi uniforme entre 0 et 1 ; chaque nombre entre 0 et 1 ayant la même chance d'être tiré.
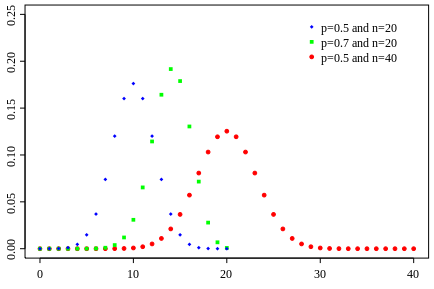
 ) d'une loi à deux évènements et pour différentes probabilités de l'évènement 0 (
) d'une loi à deux évènements et pour différentes probabilités de l'évènement 0 ( ). Pour le même nombre de lancers
). Pour le même nombre de lancers  , le pic est à 14 avec un probabilté
, le pic est à 14 avec un probabilté  et seulement 10 avec
et seulement 10 avec  . Pour
. Pour  et
et  , le pic est à 20, à la moitié du nombre de lancers, car il y autant de chance d'avoir l'évènement 0 que 1. En comparaison de
, le pic est à 20, à la moitié du nombre de lancers, car il y autant de chance d'avoir l'évènement 0 que 1. En comparaison de  et
et  , lorsque
, lorsque  , la fonction a un pic moins haut mais plus reséré, cela est dû au fait que le rapport entre l'espérance et l'écart type tend vers 0 lorsque
, la fonction a un pic moins haut mais plus reséré, cela est dû au fait que le rapport entre l'espérance et l'écart type tend vers 0 lorsque  tend vers l'infini.
tend vers l'infini.
 alors que l'événement 1 a une probabilité notée
alors que l'événement 1 a une probabilité notée  . Toujours, dans le cas d'une pièce de monnaie,
. Toujours, dans le cas d'une pièce de monnaie,  . De manière générale,
. De manière générale,  et
et  n'ont aucune raison d'être identiques comme dans le cas de la pièce de monnaie. Je peux inventer une expérience où je définis l'évènement 0 si un dé sort la valeur 1 et l'événement 1 si un dé sort 2, 3, 4, 5 ou 6. Dans ce cas
n'ont aucune raison d'être identiques comme dans le cas de la pièce de monnaie. Je peux inventer une expérience où je définis l'évènement 0 si un dé sort la valeur 1 et l'événement 1 si un dé sort 2, 3, 4, 5 ou 6. Dans ce cas  et
et  . De manière générale comme 0 et 1 forment l'ensemble univers, alors la probabilité
. De manière générale comme 0 et 1 forment l'ensemble univers, alors la probabilité  donc
donc  et
et  . Les lois à deux événements ne dépendent donc que d'un paramètre,
. Les lois à deux événements ne dépendent donc que d'un paramètre,  .
.
 de la loi à deux événements et le nombre de répétition de cette loi,
de la loi à deux événements et le nombre de répétition de cette loi,  . Son ensemble univers est constitué de toutes les séries possibles de
. Son ensemble univers est constitué de toutes les séries possibles de  répétitions de la loi à deux évènements. Le nombre d'événements vaut donc
répétitions de la loi à deux évènements. Le nombre d'événements vaut donc  car à chaque répétition (
car à chaque répétition ( en tout) il y a deux événements possibles. Par exemple, lancer une pièce trois fois donne
en tout) il y a deux événements possibles. Par exemple, lancer une pièce trois fois donne  évènements possibles. L'ensemble univers est en ce cas : (0, 0, 0), (0, 0, 1), (0, 1, 0), (0, 1, 1), (1, 0, 0), (1, 0, 1), (1, 1, 0), (1, 1, 1). Chaque évènement est donc constitué d'un certain nombre de 0, noté
évènements possibles. L'ensemble univers est en ce cas : (0, 0, 0), (0, 0, 1), (0, 1, 0), (0, 1, 1), (1, 0, 0), (1, 0, 1), (1, 1, 0), (1, 1, 1). Chaque évènement est donc constitué d'un certain nombre de 0, noté  , et de 1, noté
, et de 1, noté  . Par définition la probabilité de 0 vaut
. Par définition la probabilité de 0 vaut  et celle de 1 vaut
et celle de 1 vaut  . Donc la probabilité d'un évènement est
. Donc la probabilité d'un évènement est  . L'intérêt dans ce type d'expérience est de savoir combien de fois sort l'évènement 0 ou 1 mais sans se soucier de l'ordre. Les évènements (0, 1, 0) ou (1, 0, 0) sont alors considérés comme identiques. La loi binomiale fournit la probabilité de tirer
. L'intérêt dans ce type d'expérience est de savoir combien de fois sort l'évènement 0 ou 1 mais sans se soucier de l'ordre. Les évènements (0, 1, 0) ou (1, 0, 0) sont alors considérés comme identiques. La loi binomiale fournit la probabilité de tirer  évènements 0 sur
évènements 0 sur  lancers. Pour cela, il suffit de remarquer que pour un nombre
lancers. Pour cela, il suffit de remarquer que pour un nombre  d'événements 0 parmi
d'événements 0 parmi  lancers, il est possible d'effectuer
lancers, il est possible d'effectuer  permutations. Donc la probabilité recherchée, notée
permutations. Donc la probabilité recherchée, notée  , vaut
, vaut  .
.
 lancers, plus un évènement aura une grande probabilité plus il sortira souvent. Cependant, il est rare qu'il sorte pour chaque lancer. En conséquence, le pic de probabilité de la loi binomiale se situe en
lancers, plus un évènement aura une grande probabilité plus il sortira souvent. Cependant, il est rare qu'il sorte pour chaque lancer. En conséquence, le pic de probabilité de la loi binomiale se situe en ![E[(N+1)*p]](../pages_stat-theorie/equations_stat-theorie/equation118.png) , où
, où  est la partie entière. Si p tend vers 1 alors le pic tendra vers
est la partie entière. Si p tend vers 1 alors le pic tendra vers  , à l'inverse il tendra vers 0. De plus, l'espérance de la loi binomiale vaut
, à l'inverse il tendra vers 0. De plus, l'espérance de la loi binomiale vaut  et son écart type vaut
et son écart type vaut  . Dans le cas ou
. Dans le cas ou  est très grand, un million par exemple, Le rapport écart-type sur espérance vaut
est très grand, un million par exemple, Le rapport écart-type sur espérance vaut  , il tend vers zéro. Si l'on voit l'espérance comme la mesure d'une observation et l'écart type comme son incertitude absolue alors, si
, il tend vers zéro. Si l'on voit l'espérance comme la mesure d'une observation et l'écart type comme son incertitude absolue alors, si  est très grand, l'incertitude relative sur la mesure sera très faible. Par exemple, dans un métal constitué de milliards d'atomes, supposons que les spins de chaque atome puissent être en haut ou en bas avec la même probabilité,
est très grand, l'incertitude relative sur la mesure sera très faible. Par exemple, dans un métal constitué de milliards d'atomes, supposons que les spins de chaque atome puissent être en haut ou en bas avec la même probabilité,  . Alors le métal n'aura pas de champ magnétique significatif car il aura statistiquement à chaque instant quasiment autant de spins en haut qu'en bas. La différence instantanée entre le nombre d'atomes ayant un spin en haut ou en bas, générateur d'un champ magnétique, sera en ordre de grandeur
. Alors le métal n'aura pas de champ magnétique significatif car il aura statistiquement à chaque instant quasiment autant de spins en haut qu'en bas. La différence instantanée entre le nombre d'atomes ayant un spin en haut ou en bas, générateur d'un champ magnétique, sera en ordre de grandeur  ; ce qui fournira des champs très faibles en comparaison du potentiel que pourraient produire les
; ce qui fournira des champs très faibles en comparaison du potentiel que pourraient produire les  atomes du métal si tous les spins étaient alignés dans le même sens. De plus, ce champ magnétique est très instable dans le temps (on dit qu'il fluctue) et a une moyenne nulle au cours du temps.
atomes du métal si tous les spins étaient alignés dans le même sens. De plus, ce champ magnétique est très instable dans le temps (on dit qu'il fluctue) et a une moyenne nulle au cours du temps.
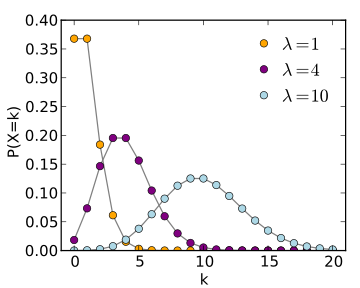
 : 1, 4 et 10.
: 1, 4 et 10.
 . La loi de probabilité de la loi de Poisson est
. La loi de probabilité de la loi de Poisson est  toujours positive (voir figure). Si
toujours positive (voir figure). Si  vaut 0, comme
vaut 0, comme  et
et  , alors
, alors  . Lorsque
. Lorsque  tend vers l'infini,
tend vers l'infini,  tend vers 0 du fait du terme en factorielle qui domine le terme
tend vers 0 du fait du terme en factorielle qui domine le terme  . Cette loi de probabilité admet un unique pic, appelé aussi mode, avec la valeur de
. Cette loi de probabilité admet un unique pic, appelé aussi mode, avec la valeur de  , si
, si  n'est pas un entier, et deux pics,
n'est pas un entier, et deux pics,  et
et  , si
, si  est un entier. L'espérance ainsi que la variance de cette fonction valent
est un entier. L'espérance ainsi que la variance de cette fonction valent  . L'écart type vaut donc
. L'écart type vaut donc  .
.
 par un pixel de caméra CCD suivent une loi de Poisson. De ce fait, lorsque plusieurs poses du même objet astronomique sont faites, durant par exemple 10 minutes, le nombre de photons d'un pixel provenant de l'objet décrit une loi de Poisson dont la moyenne qui est la mesure physique est le paramètre de la loi.
par un pixel de caméra CCD suivent une loi de Poisson. De ce fait, lorsque plusieurs poses du même objet astronomique sont faites, durant par exemple 10 minutes, le nombre de photons d'un pixel provenant de l'objet décrit une loi de Poisson dont la moyenne qui est la mesure physique est le paramètre de la loi.
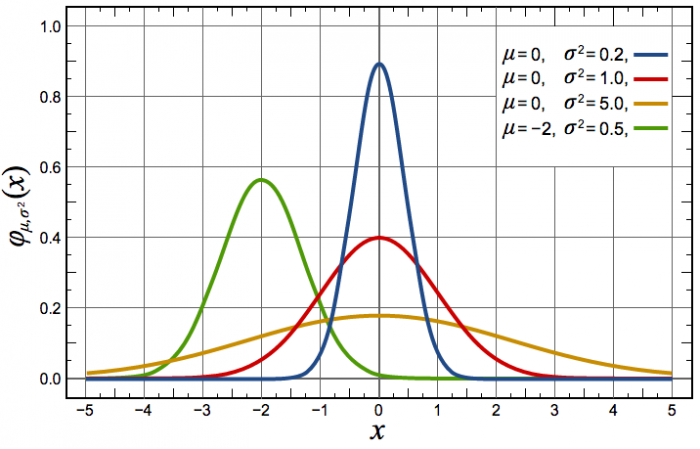
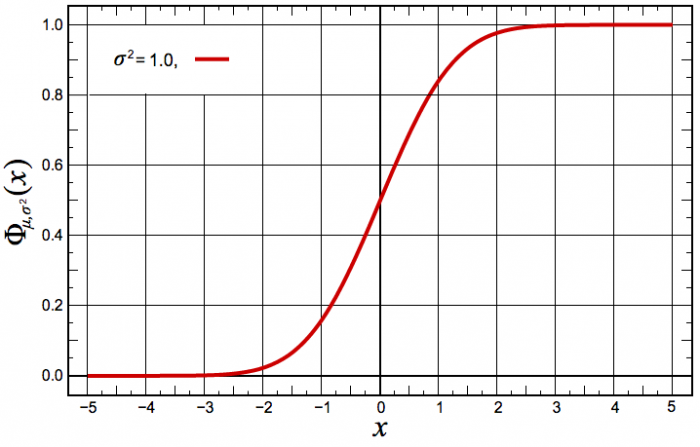
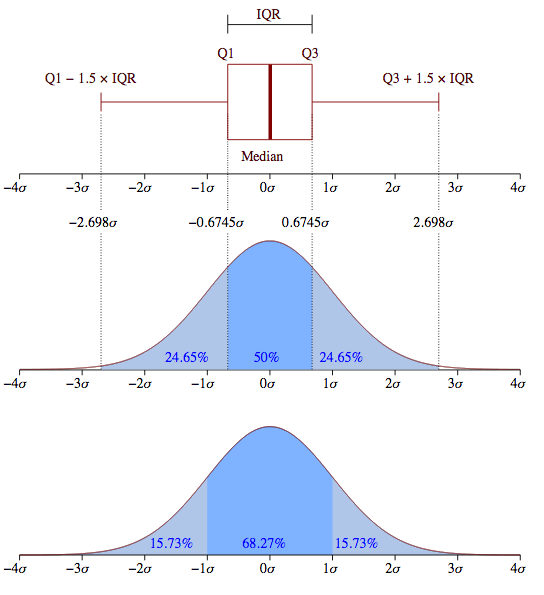
 des différents quartiles. Figure du bas, la probabilité d'avoir un résultat entre [
des différents quartiles. Figure du bas, la probabilité d'avoir un résultat entre [ ,
,  ] (15,73 %), entre [
] (15,73 %), entre [ ,
,  ] (68,27 %) et enfin entre [
] (68,27 %) et enfin entre [ ,
,  ] (15,73 %).
] (15,73 %).
 ,
,  ], cette loi de probabilité vaut :
], cette loi de probabilité vaut :  . Elle a deux paramètres qui sont
. Elle a deux paramètres qui sont  , l'espérance de la fonction de probabilité, et
, l'espérance de la fonction de probabilité, et  , l'écart type. Le terme devant l'exponentielle est un terme de normalisation afin que la probabilité totale de l'univers, donné par l'intégrale de cette loi depuis
, l'écart type. Le terme devant l'exponentielle est un terme de normalisation afin que la probabilité totale de l'univers, donné par l'intégrale de cette loi depuis  jusque
jusque  , vale 1. Le mode, valeur pour laquelle la fonction connaît un pic, est égale à sa moyenne,
, vale 1. Le mode, valeur pour laquelle la fonction connaît un pic, est égale à sa moyenne,  . L'écart-type à l'espérance est donné par
. L'écart-type à l'espérance est donné par  . A
. A  la probabilité chute d'une facteur
la probabilité chute d'une facteur  ; à
; à  , ce facteur devient
, ce facteur devient  , soit un peu plus de 90. La chute est donc très rapide à mesure qu'on s'éloigne de la valeur moyenne. En d'autres termes, la probabilité de voir sortir un réel séparé de plus de
, soit un peu plus de 90. La chute est donc très rapide à mesure qu'on s'éloigne de la valeur moyenne. En d'autres termes, la probabilité de voir sortir un réel séparé de plus de  de la moyenne devient très faible, et cette probabilité devient quasiment nulle à
de la moyenne devient très faible, et cette probabilité devient quasiment nulle à  (voir la troisième figure).
(voir la troisième figure).
 . Si la moyenne diffère significativement de l'espérance ("signifcativement" voulant dire "par rapport à l'écart-type"), on parle de mesure biaisée.
. Si la moyenne diffère significativement de l'espérance ("signifcativement" voulant dire "par rapport à l'écart-type"), on parle de mesure biaisée.
 , le signe
, le signe  signifiant Union ?
signifiant Union ?
 par rapport à
par rapport à  et
et  pour des variables discrètes à valeurs dans un ensemble fini ? Donner un exemple où
pour des variables discrètes à valeurs dans un ensemble fini ? Donner un exemple où  . Notez que le symbole
. Notez que le symbole  signifie l'intersection.
signifie l'intersection.
 ?
?
 , Démontrer que
, Démontrer que  pour une variable discrète. (La démonstration est similaire pour une variable continue en changeant le signe somme en intégrale).
pour une variable discrète. (La démonstration est similaire pour une variable continue en changeant le signe somme en intégrale).  signifie l'espérance de
signifie l'espérance de  et
et  .
.
 pour x dans l'intervall [0, 1], et
pour x dans l'intervall [0, 1], et  en dehors.
en dehors.
 , quelles sont alors les probabilités d'avoir 28 faces ou 13 piles ?
, quelles sont alors les probabilités d'avoir 28 faces ou 13 piles ?
 m², il tombe des gouttes de pluie en 10 secondes suivant une loi de Poisson de paramètre
m², il tombe des gouttes de pluie en 10 secondes suivant une loi de Poisson de paramètre  . Combien en moyenne, tombera-t-il de gouttes d'eau dans ce champ en 1 heure ?
. Combien en moyenne, tombera-t-il de gouttes d'eau dans ce champ en 1 heure ?
 (
( étant l'écart-type) ?
étant l'écart-type) ?
 égal à 5.
égal à 5.
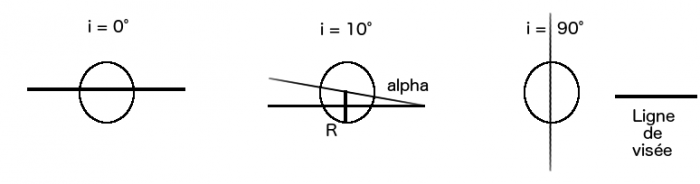
 . Ce ne sont ici que des exemples très connus mais le couple probabilité-statistique est bien plus riche et peut servir dans bons nombres de domaines scientifiques et même économiques.
. Ce ne sont ici que des exemples très connus mais le couple probabilité-statistique est bien plus riche et peut servir dans bons nombres de domaines scientifiques et même économiques.
![\alpha [^{\prime \prime}] = \frac{60 \times 60}{2 \pi} \frac{d_{\star - \mathrm{plan\`ete}}}{D_{\star - \mathrm{Terre}}}](../pages_dir-imagerie/equations_exercices/equation36.png) . Ceci nous donne 0,0035 arcsec pour 51 Peg b soit une séparation de l'ordre de la milliarcseconde.
. Ceci nous donne 0,0035 arcsec pour 51 Peg b soit une séparation de l'ordre de la milliarcseconde.
![\alpha [^{\prime \prime}] = \frac{60 \times 60}{2 \pi} \frac{d_{\star - \mathrm{plan\`ete}}}{D_{\star - \mathrm{Terre}}}](../pages_dir-imagerie/equations_exercices/equation37.png) . Ceci nous donne 0.00023 arcsec pour Corot 7 b soit une séparation de l'ordre de la dizaine de microarcsecondes.
. Ceci nous donne 0.00023 arcsec pour Corot 7 b soit une séparation de l'ordre de la dizaine de microarcsecondes.
![\alpha [^{\prime \prime}] = \frac{60 \times 60}{2 \pi} \frac{d_{\star - \mathrm{plan\`ete}}}{D_{\star - \mathrm{Terre}}}](../pages_dir-imagerie/equations_exercices/equation38.png) . Ceci nous donne 1.8 arcsec pour 2M1207 b soit une séparation de l'ordre de l'arcseconde.
. Ceci nous donne 1.8 arcsec pour 2M1207 b soit une séparation de l'ordre de l'arcseconde.
 , ce qui nous donne une distance d'environ 150 millions de kilomètres (c'est l'unité astronomique par définition). En utilisant la troisième loi de Kepler, l'on sait que pour un système donné, la période au carré sur le demi-grand axe au cube est une constante pour un système planétaire donné, on trouve ainsi un demi-grand axe de 780 millions de kilomètres pour Jupiter soit 5,2 unités astronomiques.
, ce qui nous donne une distance d'environ 150 millions de kilomètres (c'est l'unité astronomique par définition). En utilisant la troisième loi de Kepler, l'on sait que pour un système donné, la période au carré sur le demi-grand axe au cube est une constante pour un système planétaire donné, on trouve ainsi un demi-grand axe de 780 millions de kilomètres pour Jupiter soit 5,2 unités astronomiques.
![\alpha [^{\prime \prime}] = \frac{60 \times 60}{2 \pi} \frac{d_{\star - \mathrm{plan\`ete}}}{D_{\star - \mathrm{Observateur}}}](../pages_dir-imagerie/equations_probleme/equation11.png) , on trouve une séparation apparente de 1,6" pour la Terre et de 8,3" pour Jupiter.
, on trouve une séparation apparente de 1,6" pour la Terre et de 8,3" pour Jupiter.
 .
.
 et donc
et donc  où l'index
où l'index  est pour le Soleil et
est pour le Soleil et  pour l'étoile WASP-80. D'après la définition de la magnitude, on a aussi que
pour l'étoile WASP-80. D'après la définition de la magnitude, on a aussi que  , où
, où  est la magnitude absolue de l'étoile. Pour transformer la magnitude mesurée
est la magnitude absolue de l'étoile. Pour transformer la magnitude mesurée  (qui dépend de la distance de l'étoile) en magnitude absolue, on utilise
(qui dépend de la distance de l'étoile) en magnitude absolue, on utilise  , soit
, soit  et donc on obtient
et donc on obtient  , soit
, soit  .
.
 , on déduit que
, on déduit que  .
.
 .
.
 en supposant un paramètre d'impact nul. On obtient donc une durée de 0.075 jours ou 1.8 heures, ce qui est proche de ce que l'on voit sur le transit zoomé de la page précédente.
en supposant un paramètre d'impact nul. On obtient donc une durée de 0.075 jours ou 1.8 heures, ce qui est proche de ce que l'on voit sur le transit zoomé de la page précédente.
 , de la forme
, de la forme  .
La solution s'écrit
.
La solution s'écrit  .
Par identification, on a donc
.
Par identification, on a donc  .
.
 .
D'où les deux solutions
.
D'où les deux solutions  et
et 
 n'est pas physique, car elle donne une augmentation exponentielle du champ
n'est pas physique, car elle donne une augmentation exponentielle du champ  lorsque
lorsque  .
La solution finale s'écrit
.
La solution finale s'écrit  avec une fréquence spatiale
avec une fréquence spatiale  , une épaisseur de peau
, une épaisseur de peau  , et
, et 
 du sous-sol doit être telle qu'on représente le champ de température pour toutes les ondes :
du sous-sol doit être telle qu'on représente le champ de température pour toutes les ondes :  A priori, la période la plus élevée est la période annuelle (les cycles pluriannuels, plus subtiles, ne font pas partie de cette étude) :
A priori, la période la plus élevée est la période annuelle (les cycles pluriannuels, plus subtiles, ne font pas partie de cette étude) :  vaut 150 jours.
L'application numérique donne une profondeur minimale de 6,7 mètres.
vaut 150 jours.
L'application numérique donne une profondeur minimale de 6,7 mètres.
 stipule que plus une onde a une période temporelle élevée, plus elle atteindra le sous-sol en profondeur. La période
stipule que plus une onde a une période temporelle élevée, plus elle atteindra le sous-sol en profondeur. La période  montre que plus une onde a une période temporelle élevée, moins sa période spatiale (suivant la profondeur) sera élevée. Ainsi, une discrétisation astucieuse requiert de rapprocher les niveaux proches de la surface, tandis que plus on ira en profondeur, plus les niveaux seront espacés.
montre que plus une onde a une période temporelle élevée, moins sa période spatiale (suivant la profondeur) sera élevée. Ainsi, une discrétisation astucieuse requiert de rapprocher les niveaux proches de la surface, tandis que plus on ira en profondeur, plus les niveaux seront espacés.
 . Une façon plus détaillée de le comprendre est de dire qu'un évènement est le couple des résultats du dé rouge et du dé bleu (Rouge, Bleu). Les couples sont donc (1, 1), (1, 2), (1, 3), (1, 4), ... On retrouve qu'il y a 6 possibilités pour le premier membre du couple et 6 pour l'autre, cela donne 36 possibilités.
. Une façon plus détaillée de le comprendre est de dire qu'un évènement est le couple des résultats du dé rouge et du dé bleu (Rouge, Bleu). Les couples sont donc (1, 1), (1, 2), (1, 3), (1, 4), ... On retrouve qu'il y a 6 possibilités pour le premier membre du couple et 6 pour l'autre, cela donne 36 possibilités.
 évènements. Le premier est 0,0000 puis 0,0001 etc. et le dernier est 0,9999.
évènements. Le premier est 0,0000 puis 0,0001 etc. et le dernier est 0,9999.
 ) se définit comme l'ensemble contenant les éléments se trouvant dans A ou dans B. On a alors
) se définit comme l'ensemble contenant les éléments se trouvant dans A ou dans B. On a alors  où le symbole
où le symbole  désigne l'intersection.
désigne l'intersection.
 se définit comme l'ensemble contenant les éléments se trouvant dans A etdans B. L'ensemble
se définit comme l'ensemble contenant les éléments se trouvant dans A etdans B. L'ensemble  étant par conséquent inlcus dans A et B, sa probabilité sera inférieure ou égale à la probabilité de chacun de ces deux ensembles :
étant par conséquent inlcus dans A et B, sa probabilité sera inférieure ou égale à la probabilité de chacun de ces deux ensembles :  . Dans un jeu de 52 cartes, si A est l'ensemble des cartes rouges et B l'ensemble des cartes noires alors
. Dans un jeu de 52 cartes, si A est l'ensemble des cartes rouges et B l'ensemble des cartes noires alors  est l'ensemble vide, d'où
est l'ensemble vide, d'où  .
.
 Or
Or  Donc
Donc 
 , se définit comme tout ce qui n'est pas coeur : pique, trèfle et carreau. Il est parfois plus simple de définir un ensemble par ce qu'il n'est pas plutôt que par ce qu'il est. De là, le principe du tiers exclu donne
, se définit comme tout ce qui n'est pas coeur : pique, trèfle et carreau. Il est parfois plus simple de définir un ensemble par ce qu'il n'est pas plutôt que par ce qu'il est. De là, le principe du tiers exclu donne  , l'univers des possibles. Or
, l'univers des possibles. Or  . Comme cette dernière intersection est vide, on a
. Comme cette dernière intersection est vide, on a  .
.

 , il est alors possible de calculer la probabilité pour chaque valeur possible de la somme (de 2 à 12). Comme les évènements sont par nature disjoints l'un de l'autre,
, il est alors possible de calculer la probabilité pour chaque valeur possible de la somme (de 2 à 12). Comme les évènements sont par nature disjoints l'un de l'autre,  est toujours nulle. De ce fait, pour avoir la probabilité, il suffit de prendre le nombre total de combinaisons donnant la même valeur pour la somme, et de diviser ce nombre par 36.
est toujours nulle. De ce fait, pour avoir la probabilité, il suffit de prendre le nombre total de combinaisons donnant la même valeur pour la somme, et de diviser ce nombre par 36.
 compris entre 2 et 12,
compris entre 2 et 12,  .
.
 , et celle de faire une somme valant 6 avec deux dés est
, et celle de faire une somme valant 6 avec deux dés est  , comme vu à la question précédente. Donc il vaut mieux prendre un seul dé pour espèrer faire un 6.
, comme vu à la question précédente. Donc il vaut mieux prendre un seul dé pour espèrer faire un 6.
 cm2 et celle de la cible tout entière vaut
cm2 et celle de la cible tout entière vaut  cm2. Or, la probabilité est proportionnelle à la surface, donc la probabilité de toucher la zone centrale, sachant que l'on a touché la cible, est P(toucher la cible)
cm2. Or, la probabilité est proportionnelle à la surface, donc la probabilité de toucher la zone centrale, sachant que l'on a touché la cible, est P(toucher la cible)  P(toucher la zone centrale | toucher la cible)
P(toucher la zone centrale | toucher la cible)  .
.
 P(non malade) / P(positif). La probabilité d'être non malade est P(non malade) = 0,999 d'après l'énoncé. La probabilité d'être positif mais en étant non malade est P(positif | non malade) = 5% = 0,05, toujours d'après l'énoncé. Il reste le plus difficile, la probabilité d'être dépisté positif, qui est la somme entre les cas (disjoints) "malades" et "non malades" : P(positif) = P(positif | malade)
P(non malade) / P(positif). La probabilité d'être non malade est P(non malade) = 0,999 d'après l'énoncé. La probabilité d'être positif mais en étant non malade est P(positif | non malade) = 5% = 0,05, toujours d'après l'énoncé. Il reste le plus difficile, la probabilité d'être dépisté positif, qui est la somme entre les cas (disjoints) "malades" et "non malades" : P(positif) = P(positif | malade)  P(malade) + P(positif | non malade)
P(malade) + P(positif | non malade)  P(non malade) = 0,99
P(non malade) = 0,99 0,001 + 0,05
0,001 + 0,05 0,999 = 0,00099 + 0,04995 = 0,05094. En définitif, la probabilité d'être faux-positif est P(non malade | positif) = 0,05
0,999 = 0,00099 + 0,04995 = 0,05094. En définitif, la probabilité d'être faux-positif est P(non malade | positif) = 0,05  0,999 / 0,05094
0,999 / 0,05094  0,98. Donc 98% des patients étant déclarés malades sont en réalité sains.
0,98. Donc 98% des patients étant déclarés malades sont en réalité sains.
 =
=  =
=  .
Or
.
Or  , alors
, alors  .
Ce qui montre que variance =
.
Ce qui montre que variance =  .
.
 d'une variable aléatoire :
d'une variable aléatoire :  . Cette fonction de distribution décrit la répartition de la variable aléatoire
. Cette fonction de distribution décrit la répartition de la variable aléatoire  selon l'égalité
selon l'égalité 
 et 1 pour
et 1 pour  .
La fonction de distribution est l'intégrale de la loi de probabilité. Donc elle vaut
.
La fonction de distribution est l'intégrale de la loi de probabilité. Donc elle vaut  où
où  est la constante de normalisation pour que
est la constante de normalisation pour que  .
.
 , on a
, on a  et l'écart-type de
et l'écart-type de  vaut
vaut 
 combinaisons pour avoir 28 faces. Il y a
combinaisons pour avoir 28 faces. Il y a  pour avoir 13 piles.
pour avoir 13 piles.
 (face) = 0,8,
(face) = 0,8,  (nombre de "face" = 28) =
(nombre de "face" = 28) =  et
et  (nombre de "pile" = 13) =
(nombre de "pile" = 13) = 
 ,
,  ,
,  et
et 
 gouttes. Comme en une heure, il y a 360 fois 10 secondes, donc en 1 heure, il tombe en moyenne 446482,8 gouttes.
gouttes. Comme en une heure, il y a 360 fois 10 secondes, donc en 1 heure, il tombe en moyenne 446482,8 gouttes.
 et d'écart-type
et d'écart-type  , on a
, on a 
 est donnée avec la loi de distribution :
est donnée avec la loi de distribution :  .
En regardant le cours, on calcule que la probabilité est d'environ 0,3173 en dehors de
.
En regardant le cours, on calcule que la probabilité est d'environ 0,3173 en dehors de  et d'environ 0,0027 en dehors de
et d'environ 0,0027 en dehors de  .
.
 de la valeure théorique. Cela est probable (31,73% de chance, voir question ci-dessus) ; la théorie ne semble pas fausse. Par contre si l'écart-type attendu est 0,05 alors la mesure est à 10
de la valeure théorique. Cela est probable (31,73% de chance, voir question ci-dessus) ; la théorie ne semble pas fausse. Par contre si l'écart-type attendu est 0,05 alors la mesure est à 10  . A trois
. A trois  , la probabilité est déjà faible (0,0027) mais à 10
, la probabilité est déjà faible (0,0027) mais à 10  elle est infinitésimale. La théorie semble alors invalidée par l'expérience.
elle est infinitésimale. La théorie semble alors invalidée par l'expérience.