Besoin scientifique
L'astronomie est science d'observation. Dans l'Antiquité, l'observation des objets célestes visibles à l’œil nu permet d'abord la mesure du temps. Ensuite, elle s'attache à prédire les mouvements des objets observés. Les observations étaient menées par des astrologues (qui parlent des astres) qui, au fil du temps, ont évolué pour travailler comme astronomes (qui étudient le mouvement des astres) et, aujourd'hui, astrophysiciens (qui utilisent la physique pour comprendre les astres). Au cours des siècles les instruments utilisés s'améliorent, permettant des observations toujours plus fines. Le XXème siècle marque un tournant, les astronomes se retrouvant confrontés à des limitations difficilement surmontables ainsi qu'à des besoins nouveaux :
- de nombreuses longueurs d'onde ne sont pas accessibles depuis le sol car elles sont absorbées par l'atmosphère de notre planète ;
- la pollution atmosphérique limite la précision des instruments au sol ;
- la turbulence atmosphérique dégrade les images astronomiques ;
- on commence à vouloir effectuer des observations géophysiques et géographiques de notre planète pour la météorologie, la géodésie, la climatologie, l'inventaire des ressources naturelles, la reconnaissance militaire…);
- enfin, un besoin de grands relevés à l'échelle de toute la planète apparaît.
Pour certains objectifs, il apparaît alors nécessaire de satelliser les instruments d'observation.
Différentes applications actuelles
Dès le début de l'ère spatiale, les industriels emboîtent le pas des scientifiques et imaginent des applications commerciales. On retrouve ainsi, de nos jours, de nombreux types de satellites différents :
- satellites astronomiques, dédiés à l'observation d'objets spatiaux de l'Univers proche ou lointain. On peut citer le télescope spatial infrarouge Herschel et la mission de cartographie de notre galaxie Gaia, tous deux de l'agence psatiale européenne (ESA), ou encore le chasseur d'exo-planètes Kepler de l'agence spatiale américaine (NASA) ;
- satellites de communication, qui répondent à des besoins de télécommunication, tels que ceux d'Intelsat, premier fournisseur de services de télécommunication par satellites en 2008 ;
- satellites d'observation de la Terre, à visée non-militaire telles que la surveillance environnementale, la météorologie ou encore la cartographie. La famille de satellites SPOT développées par l'agence spatiale française (CNES) en fait partie ;
- satellites de positionnement et de navigation servant à localiser des récepteurs au sol. À titre d'exemple, nous pouvons citer les systèmes américain GPS, européen GALILEO et russe GLONASS ;
- vaisseaux spatiaux habités, comme la famille de véhicules spatiaux soviétiques puis russes Soyouz ;
- stations spatiales, qui sont des structures artificielles développées pour que des humains puissent vivre dans l'espace. À la différence des véhicules spatiaux habités, celles-ci ne disposent pas d'un moyen de propulsion principal. La Station Spatiale Internationale (ISS) en est un exemple.
 Aller plus loin
Aller plus loin
Opacité atmosphérique
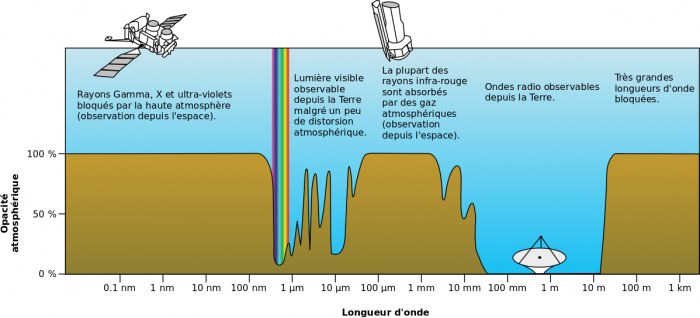
Pourcentage d'absorption du spectre électromagnétique par l'atmosphère terrestre. Si l'atmosphère est opaque à une grande partie du spectre électromagnétique, parmi les exceptions se trouve le domaine du visible.
Crédit :
NASA
Turbulence atmosphérique et optique adaptative
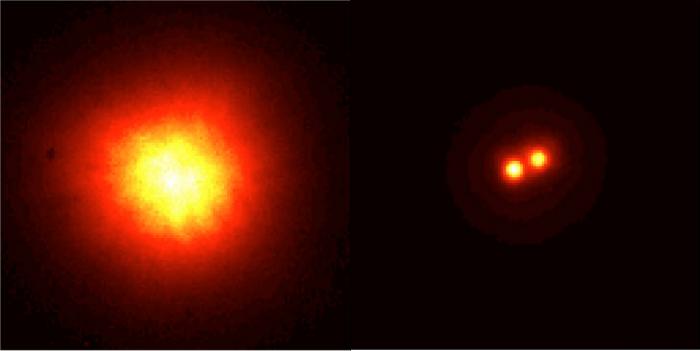
Effets liés à turbulence atmosphérique. L'image de gauche est l'étoile HIC 59206 capturée par le VLT, tandis que celle de droite est la même image corrigée par
optique adaptative.
Crédit :
European Southern Observatory
Météorologie
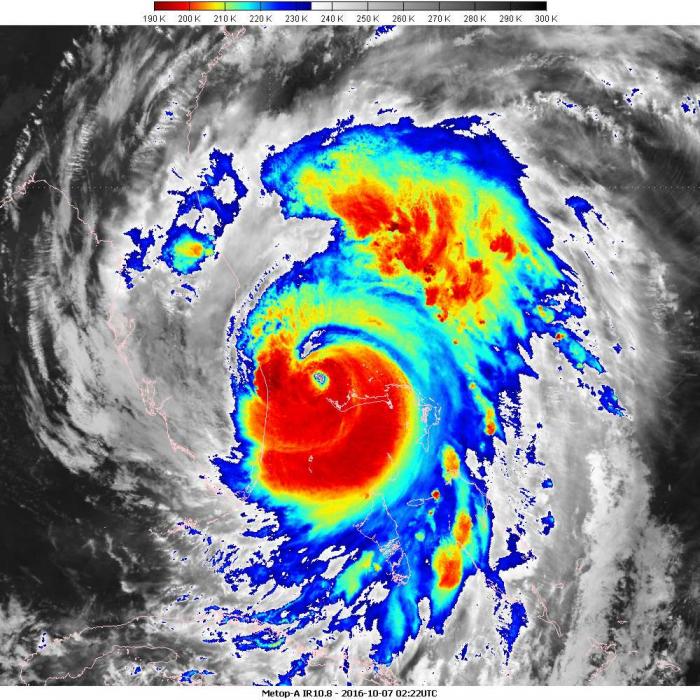
L'ouragan Matthew vu dans l'infrarouge par le satellite Metop-A, le 7 octobre 2016. Les observations dans plusieurs bandes spectrales conduisent, une fois compilées, à une carte de température.
Crédit :
Eumetsat
Les satellites sont généralement classés en fonction de leur masse au lancement. Alors que dans les années 60, lorsque l'affrontement politique entre les États-Unis et l'Union soviétique s'exprimait sur le terrain de la course à la Lune, les engins spatiaux n'étaient limités que par les progrès techniques de l'époque, ce sont actuellement des critères économiques qui prévalent lors du développement des satellites. Une relation à peu près linéaire existe entre la masse d'un satellite et son coût. Une classification typique des satellites est présentée dans le tableau suivant.
Classification des satellites
| Dénomination | Masse | Coût | Examples |
|---|
| Gros satellites | > 1 t | > 150 M€ | Station Spatiale Internationale (500 t) |
| Sondes spatiales : Cassini Huygens autour de Saturne (NASA, 5,7 t) / Rosetta autour d'une comète (ESA ,3 t) |
| Satellites GEO de 3 à plusieurs dizaines de tonnes |
| Satellites LEO, MEO et GEO de 1 à 3 tonnes |
| Satellites moyens | <1 t | < 150 M€ | Constellation de télécommunication Iridium en LEO (66 satellites, 700 kg) |
| Télescope spatial CoRoT pour l'étude des étoiles (CNES, 668 kg) |
| Constellation Galileo, système de positionnement par satellites (ESA, 700 kg) |
| Minisatellites | < 500 kg | < 50 M€ | Sondes spatiales : New Horizons vers Pluton (NASA, 478 kg, ~600 M€) / SMART-1 vers la Lune (ESA, 366 kg, ~110 M€) |
| Plateforme PROTEUS (Thalès) |
| Microsatellites | < 100-150 kg | < 8 M€ | Plateforme Myriade (CNES, 100-150 kg) : PARASOL pour l'étude de l'atmosphère terrestre / MICROSCOPE pour le test du principe d'équivalence |
| PROBA-1 : démonstrateur technologique (ESA, 94 kg) |
| Nanosatellites | < 10 kg | < 3 M€ | Constellation Planet Labs (60 CubeSats 3U de 5 kg début 2017), observation de la Terre |
| GOMX-1 : CubeSat 2U (GomSpace 2,66 kg), démonstrateur technologique |
| ROBUSTA-1A (CNES / Université de Montpellier 2) : CubeSAT 1U (1 kg) développé par des étudiants |
| Picosatellites, femtosatellites... | < 1 kg | < 300 k€ | WREN (STADIKO) : femtosatellite de démonstration technologique financé participativement |
Source d'information
Masse et coûts de quelques satellites
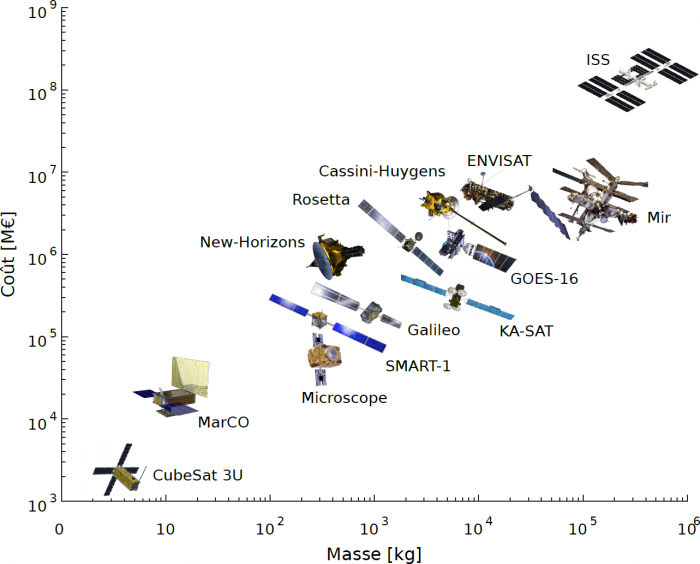
Comparaison de la masse et du coût de certains satellites. Les deux paramètres sont reliés par une relation presque linéaire, les satellites scientifiques apparaissant plus coûteux.
Crédit :
Gary Quinsac
Hubble

Télescope spatial Hubble. Sa masse est de 11 tonnes, il fait la taille d'un bus (13 x 4 x 4 m3) et consomme 2,8 kW. Son orbite relativement basse (550 km d'altitude) a permis aux navettes spatiales américaines de venir effectuer des réparations et des remplacements d'équipements.
Crédit :
ESA
Station Spatiale Internationale

Plus grand objet artificiel placé dans l'espace (110 m de longueur, 74 m de largeur et 30 m de hauteur), la Station Spatiale Internationale fait environ 400 tonnes. Chacune de ses 16 ailes de panneaux solaires mesure 35 m de long pour 12 m de large, produisant un maximum de 120 kW. Son altitude varie entre 330 et 420 km et a été choisie pour faciliter son assemblage/ravitaillement en orbite par les différents pays impliqués dans son exploitation.
Crédit :
CNES
Satellite GPS

Un satellite GPS de 1,5 tonne pour 2.5 x 2 x 2 m3. Il consomme 1,9 kW et orbite à 20000 km d'altitude. De nombreux satellites de ce type composent ce qu'on appelle une constellation GPS, l'objectif étant d'avoir toujours au moins 4 satellites en visibilité depuis une zone donnée à la surface de la Terre.
Crédit :
GPS.gov
Satellite de télécommunication
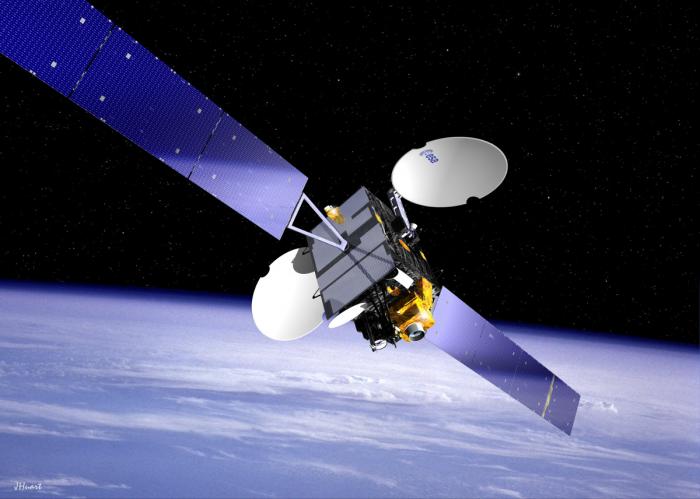
Satellite de télécommunication KA-SAT d'une masse de 6 tonnes (dont 3 pour le carburant) et mesurant 5 x 2 x 2 m3. Comme de nombreux satellites de télécommunication il se trouve sur l'orbite géostationnaire (GEO), c'est à dire à 36000 km d'altitude. Ses panneaux solaires de 40 m d'envergure lui permettent de produire 14,4 kW.
Crédit :
J. Huart/ ESA
Un système spatial se décompose en trois éléments :
- le segment spatial,
- le segment sol,
- le lancement,
Segment spatial
Le segment spatial est décomposé en deux sous-ensembles principaux : la charge utile et la plateforme. La charge utile regroupe les instruments nécessaires à la réussite de la mission. Cela va du montage optique pour un satellite d'observation tel que Hubble aux antennes et amplificateurs associés pour un satellite de télécommunication. Il est important de remarquer que c'est la charge utile d'un satellite qui définit sa mission. La plate-forme assure les servitudes, c'est-à-dire l'ensemble des fonctions génériques nécessaires à l'activité en orbite. Ses différentes fonctions sont :
- la structure porteuse,
- le contrôle thermique,
- la génération, le stockage et la distribution d'énergie,
- la télécommunication,
- la télémesure, la télécommande et la localisation,
- le traitement, le stockage et la gestion des données à bord,
- le contrôle d'attitude et d'orbite,
- la propulsion.
Ces aspects sont developpés plus en détail dans la partie consacrée aux sous-systèmes.
Segment sol
Le segment sol se compose des stations de poursuite, des moyens d'opération et de commande/contrôle et des moyens de programmation de la charge utile, de réception, pré-traitement, archivage et diffusion des informations de cette même charge utile (centre de mission).
Lancement
Le lancement est l'étape permettant la mise en orbite d'un objet. C'est une étape dimensionnante en termes d'orbite atteinte, de masse et de volume disponibles sous coiffe. Le lanceur le plus lourd jamais créé a permis à un homme de marcher sur la Lune pour la première fois en 1969 et se nomme Saturn V. Depuis, de très nombreux types de lanceurs ont été développés pour permettre à des charges utiles plus ou moins importantes d'atteindre différentes orbites.
Les différentes orbites terrestres sont classées en fonction de leurs altitude, inclinaison et excentricité. En voici quelques unes :
- basses ou LEO pour "Low Earth Orbit", ces orbites présentent l'avantage de permettre des révolutions rapides et d'être sous les ceintures de Van Allen dont elles ne subissent pas les particules énergétiques ;
- héliosynchrones ou SSO pour "Sun Synchronous Orbit", elles sont choisies spécifiquement pour que l'angle entre le plan d'orbite et la direction du Soleil reste quasiment constant, ce qui permet notamment d'éviter les phases d'ombre dues à la Terre ;
- moyennes ou MEO pour "Medium Earth Orbit", privilégiées par les satellites de navigation (GPS, Glonass, Galileo) ;
- très elliptiques ou HEO pour "Highly Elliptical Orbit", elles sont utilisées pour permettre à des satellites de passer une longue période, autour de son apogée, au dessus de zones du globe à forte latitude ;
- de transfert géostationnaire ou GTO, pour "Geostationary Transfert Orbit", pour rejoindre une orbite géostationaire depuis une orbite basse ;
- géostationnaires ou GEO pour "Geostationary Earth Orbit", pour orbiter en 24h et ainsi pouvoir se trouver en permanence au-dessus du même point sur la Terre au voisinage de l'équateur.
- lointaines ou interplanétaires; elles regroupent les trajectoires de rencontre avec la Lune ou d'autres corps de notre système solaire, ainsi que des zones d'équilibre gravitationnel stables nommées points de Lagrange.
Ceintures de Van Allen
Les ceintures de Van Allen, ainsi nommées en l'honneur du physicien les ayant découvertes, sont des zones de la magnétosphère terrestre contenant une grande densité de particules énergétiques, pour la plupart d'origine solaire. Leurs deux principaux effets sont la création d'aurores polaires lorsque les particules énergétiques rencontrent l'atmosphère terrestre et la mise en danger des satellites les traversant (des blindages sont nécessaires pour protéger les équipements sensibles de satellites passant une longue période dans les ceintures). On a pour habitude de considérer qu'elles sont au nombre de deux, la première s'étendant entre 700 km et 10 000 km d'altitude et la seconde entre 13 000 km et 65 000 km. D'autres ceintures sont susceptibles d'apparaître mais ne semblent pas permanentes.
Station sol de PicSat

Station sol UHF/VHF installée à l'Observatoire de Meudon pour communiquer avec le CubeSat PicSat.
Crédit :
PicSat
Comparaison de lanceurs
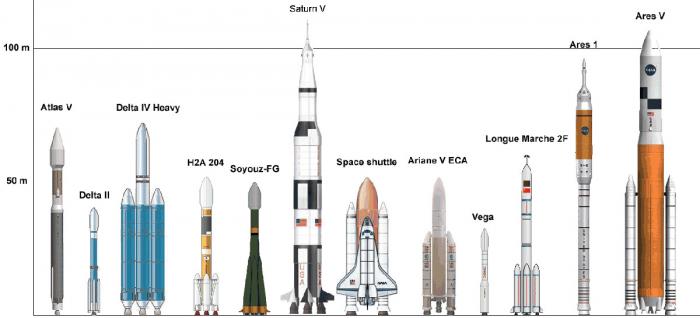
Comparaison de lanceurs utilisés depuis le début de l'ère spatiale. La masse de carburant embarqué par un lanceur pour satelliser un objet représente la majeure partie de sa masse au lancement. Par exemple, l'Ariane 5 GS est capable d'emporter plus de 6 tonnes en orbite GTO, elle mesure à peu près 50 m de hauteur pour une masse au décollage de 750 tonnes composée à 90% de carburant.
Crédit :
NASA
Orbites terrestres
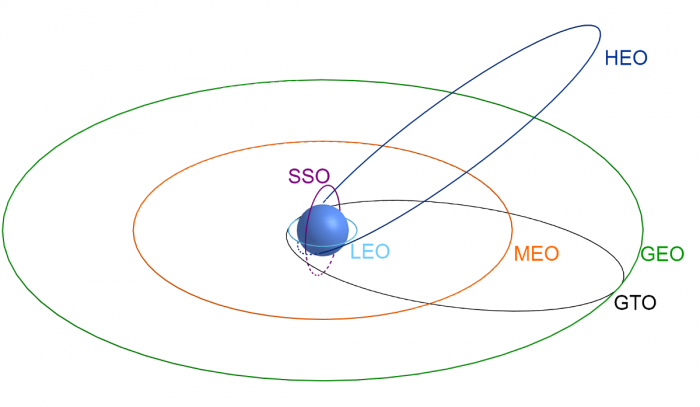
Orbites terrestres les plus utilisées.
Crédit :
Gary Quinsac
Aurore boréale

Photo d'une aurore boréale en Alaska. Ces phénomènes lumineux sont provoqués par la rencontre entre des particules énergétiques provenant du Soleil ou du rayonnement cosmique et de l'atmosphère. Ces particules ont été préalablement piégées par le champ magnétique terrestre dans une zone que l'on nomme ceinture de Van Allen.
Tout projet spatial répond à un enjeu : objectif scientifique, démonstration technologique... Il doit donc faire face à son lot d'exigences et de contraintes. Les exigences définissent les fonctions qu'un système ou un composant doit remplir. Elles répondent à la question "que fait ce système/composant ?". Les contraintes spécifient, quant à elles, ce que le système doit être. Elles sont généralement des limitations du système.
Cette situation est encore plus vraie pour les projets spatiaux. Les erreurs commises sont le plus souvent irréversibles et irratrapables une fois que le système est lancé. Il faut ainsi :
- remplir des exigences mission,
- prendre en compte toutes les contraintes technologiques, d'environnement spatial, de lancement et des moyens sols,
- respecter les règlements,
- proposer des compromis performance/coûts et d'éventuelles modifications des exigences.
Les exigences mission dépendent du type de satellite considéré, mais le principe est toujours le même : un besoin est exprimé auquel le satellite va essayer de répondre. Se faisant, un type d'orbite va être identifié :
- terrestre : basse, héliosynchrone, géostationnaire, excentrique ;
- non-terrestre : au point de Lagrange, solaire, interplanétaire.
De ce choix découle un système de lancement, ou lanceur. La charge utile embarquée doit ensuite répondre aux exigences mission tout en prenant en compte les contraintes imposées par le système de lancement (volume et masse disponibles, interfaces) et l'environnement orbital. Toutes ces questions se posent bien entendues également pour la plate-forme, qui devra s'adapter à la charge utile choisie (ou inversement, si le choix est fait d'utiliser une plate-forme standardisée).
L'environnement spatial présente de nombreuses spécificités qui doivent être prises en compte dès le début du développement :
- le vide,
- l'apesanteur,
- les forts contrastes de température et l'absence de convection thermique,
- les effets des rayonnements électromagnétiques et des particules chargées énergétiques,
- la présence d'oxygène atomique qui est un agent chimique agressif,
- la collision possible avec des débris ou des micrométéorites,
- l'impossibilité d'accéder au satellite une fois en orbite (sauf cas exceptionnel).
Outre ces aspects négatifs, l'environnement peut également être mis à profit pour certaines fonctions :
- contrôler l'attitude avec le gradient de gravité, la pression de radiation solaire ou le champ magnétique local,
- contrôler l'orbite avec le freinage atmosphérique,
- refroidir des composants avec le fond du ciel à 3 K.
Que le programme soit public ou privé, la question du coût reste centrale. Ce coût doit prendre en compte le lancement, le segment spatial (durée de fabrication, des essais…), le système sol et des opérations. Il est ensuite amorti sur la durée de vie du système.
Des règlements nationaux et internationaux imposent des restrictions, notamment en termes de fréquences de télécommunication. La bande de fréquence utilisée doit avoir été définie en amont. Dans certains cas (satellite GEO) la notion de compatibilité électromagnétique implique de ne pas perturber les satellites voisins. La gestion d'un satellite en fin de vie est de plus en plus importante du fait de la prolifération des débris en orbite terrestre. Ainsi en France, la Loi sur les Opérations Spatiales (LOS) réglemente ces aspects.
 Exemple : pollution orbitale
Exemple : pollution orbitale
En orbite autour de la Terre, les objets sont animés de vitesses relatives qui peuvent atteindre 15 à 20 km/s. À de telles vitesses, les énergies cinétiques qui sont en jeu peuvent engendrer de très importants dégâts. Chaque collision, au même titre que le délitement des vieux satellites, crée de nouveaux débris qui viennent augmenter le nombre d'objets orbitant la Terre. Cette pollution orbitale croît très fortement et impose aux États et aux entreprises de mettre en place des stratégies de réduction du nombre de débris.
Classification des débris orbitaux et risques associés
| Taille de l'objet | Nombre d'objets | Répertoriés ? | Risques associés à l'objet |
|---|
| > 10 cm | 20 000 | Oui | Collisions catastrophiques, production de débris |
| 1 cm < objet < 10 cm | 500 000 | Non | Perte de la mission, aucun blindage ne résiste à des objets > 2 cm |
| < 1 cm | > 10 000 000 | Non | Perforations, risque de perte d'équipement critique |
Arbre fonctionnel
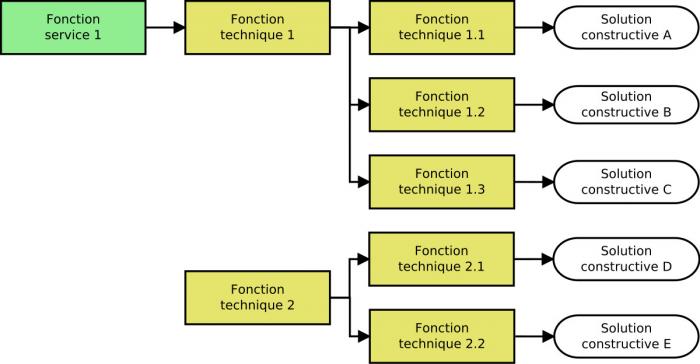
Exemple d'arbre fonctionnel. A partir des fonctions principales sont dérivées des fonctions secondaires, jusqu'à pouvoir identifier des solutions exécutant ces fonctions.
Crédit :
Gary Quinsac
Nombre mensuel d'objets en orbite terrestre par type d'objets
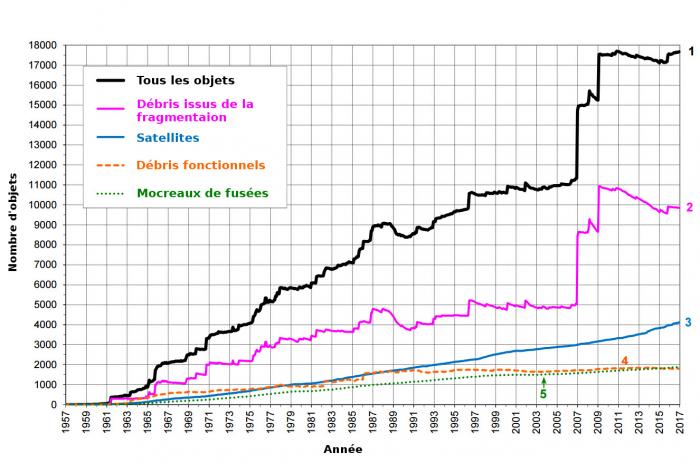
Résumé de tous les objets en orbite terrestre officiellement répertoriés par l'U.S. Space Surveillance Network. Les "débris issuent de la fragmentation" regroupent les débris produits par des anomalies (explosions, casses...), tandis que les "débris fonctionnels" regroupent l'ensemble des objets libérés, distribués ou séparés dans le cadre d'une mission. Les "morceaux de fusée" quant à eux sont des pièces ou des ensembles de pièces appartenant à la fusée (tels que les différents étages de poussée). Le pic observé en 2007 correspond à la destruction par la Chine de l'un de leurs satellites météorologiques (Fengyun-1C) dans le cadre d'un test de missile anti-satellite. Le second, en 2009, est dû à la collision entre un satellite militaire russe hors de service (Cosmos 2251) et un satellite de télécommunication américain (Iridium 33).
Crédit :
NASA - Orbital Debris Quarterly News, February 2017
Cycle de vie d'un système
Au cours d'un projet, un système va être amené à évoluer, d'un premier état conceptuel à un état physique. Des tests doivent alors êtres effectués pour s'assurer que le système répond aux exigences identifiées précédemment, ce sont les étapes de validation. Les états successifs du système et les activités le concernant constituent ce que l'on appelle le cycle de vie. S'il existe différentes façons de représenter ce-dernier, le cycle en V reste le modèle le plus suivi. Ce cycle est parcouru de gauche à droite, d'abord du haut vers le bas puis du bas vers le haut. Aux phases de conception succèdent les phases d'assemblage, d'intégration et de test. Le cycle en V permet d'identifier facilement l'étape de validation correspondant à chaque étape de conception.
Dans certains projets, tels que des projets étudiants, on utilise des méthodes agiles. Elles ont pour origine le manifeste Agile et reposent sur un cycle de développement itératif, incrémental et adaptatif. Ces méthodes autorisent une plus grande flexibilité et réactivité, nécessaires à ces projets.
Phases d'un projet spatial
Dans le cas d'un projet spatial, on divise le déroulement du projet en 7 phases successives. Chacune d'entre-elles correspond à un état du système et se conclut par une revue de projet. On peut remarquer que les premières phases correspondent aux étapes de conception (0-A-B), avant de passer à la réalisation (C-D), à l'utilisation et au retrait.
- Durant la phase 0, on exprime la mission en termes de besoin, on évalue l'environnement et ses contraintes et on identifie des concepts possibles.
- La phase A sert à affiner et valider le besoin. Les différents concepts possibles sont ainsi explorés, on identifie et évalue les éléments critiques afin d'estimer les risques associés.
- Durant la phase B l'architecture système est précisément définie. Cette architecture système inclut les différentes vues (opérationnelle, fonctionnelle et technique) et les différents points de vue (conception, supervision, opération, maintenance) du système. Cette architecture système est un élément incontournable de respect des contraintes de coût, de délai, de qualité et de performance inhérentes à un projet spatial. On commence également à sélectionner et définir, préliminairement, des solutions techniques.
- La définition détaillée n'a lieu que lors de la phase C.
- La phase D correspond à la phase de réalisation et de test des produits.
- C'est seulement lors de la phase E que le système va entrer dans sa période d'utilisation. Une fois lancé, une dernière qualification en vol a lieu puis l'exploitation peut commencer.
- Lorsque sa mission est terminée, le système entre en phase F, qui correspond à la fin de vie du satellite.
Cycle en V
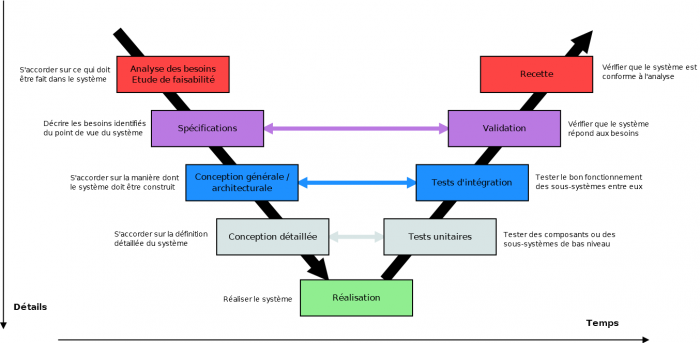
Cycle en V d'un produit. Chaque étape de conception correspond à une étape de validation, de la même couleur.
Crédit :
Gary Quinsac
Phases d'un projet spatial
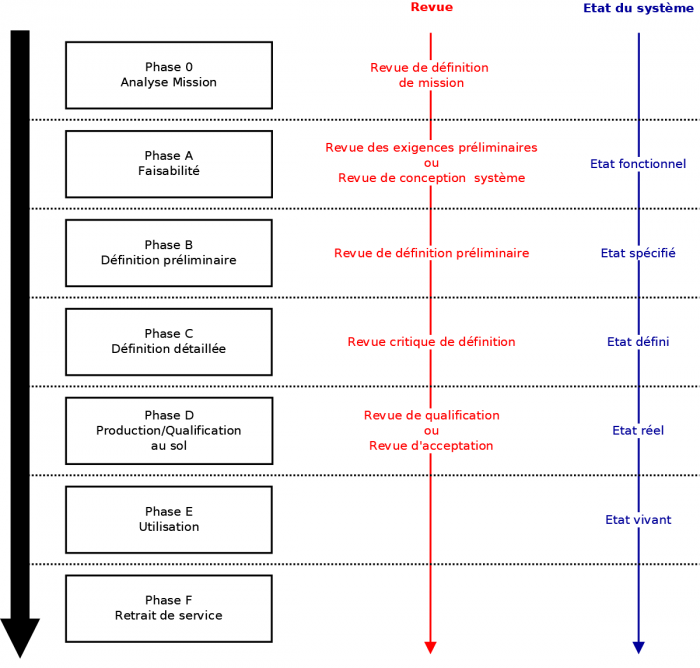
Phases d'un projet spatial. Chaque phase correspond à un état d'avancement du système et se conclut par une revue de projet.
Crédit :
Gary Quinsac
Le standard CubeSat a été défini en 1999 par l'Université polytechnique de Californie (Cal Poly) et l'Université de Stanford comme un format de nanosatellites. Ce standard définit une unité de base, appelée "U", qui est un cube de 10 cm d’arête pour une masse d'environ 1,3 kg. Ces unités peuvent être assemblées de manière à obtenir des satellites plus volumineux, appelés "2U", "3U", "6U", "12U" ou même "27U" en fonction du nombre d'unités utilisé. Outre son format réduit, ce standard permet une importante réduction des coûts financiers et opérationnels :
- Possibilité pour un CubeSat d'être lancé en tant que charge utile secondaire, à condition qu'il n'amène pas de risque supplémentaire à la mission principale. L'extérieur de la structure des CubeSat étant standardisé, cela permet l'utilisation de "déployeurs" qui assurent l'interface entre le satellite et le lanceur. Le CubeSat est placé en position éteinte dans un déployeur fermé (P-POD ou équivalent) attaché à la fusée qui assure le lancement. Le CubeSat reste ainsi dans le déployeur jusqu’à son largage dans l’espace par ouverture du déployeur. Le largage déclenche la mise sous tension du CubeSat et donc le début de sa mission ;
- Fabrication en série donnant lieu à l'apparition de composants sur étagère (COTS pour "Components On The Shelf" en anglais) ;
Illustration du standard CubeSat
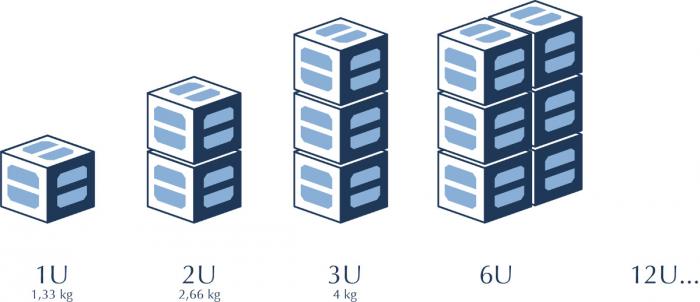
Chaque unité ("U) est un cube de 10 cm d’arête pour une masse d'environ 1,3 kg. Il est possible d'assembler plusieurs unités.
Crédit :
C²ERES, Campus et Centre spatial de PSL
Adopté dans différents secteurs
Il est possible de classer les CubeSats en différents secteurs et par extension tous les satellites de moins de 50 kg (échelles "nano" et en partie "micro"), dont les CubeSats forment la majeure partie :
- Secteur civil : ils sont utilisés pour des activités non militaires et à but non lucratif. On peut distinguer les deux catégories suivantes :
- Secteur académique : secteur historique des CubeSats, il regroupe l'ensemble des satellites développés à des fins pédagogiques. L’objectif principal est de former les étudiants à un certain nombre de disciplines d’ingénierie nécessaires pour réaliser un satellite. C’est dans ce but que des universités américaines ont créé le standard CubeSat. La mission particulière du satellite n’est donc pas en soi l’objectif prioritaire.
- Secteur public : on y retrouve tous les CubeSats des agences nationales ou des laboratoires de recherche (exemple : NASA).
- Secteur militaire : ce secteur regroupe les opérateurs dont l'objectif principal est de participer à des activités de défense nationale (exemple : US Naval Research Laboratory). La demande des opérateurs militaires devrait être constante dans les années à venir.
- Secteur commercial : les opérateurs de cette catégorie envoient des satellites pour générer de l'activité et du profit (exemple : Spire). Ce secteur commercial devient le principal moteur du lancement de nouveaux CubeSats, avec plus de 70 % des lancements prévus dans les 5 prochaines années.
De nombreuses applications
Le même classement peut être fait concernant les familles d'applications :
- CubeSat technologique : l’objectif principal est de démontrer une technologie particulière en environnement spatial avec un satellite beaucoup moins cher qu’une mission traditionnelle. Ainsi les nanosatellites peuvent nous aider à préparer les instruments de demain. Si la mission du nanosat est un succès, la technologie aura un niveau de maturité technologique (TRL pour "technology readiness level" en anglais) plus élevé, ce qui permettra de la proposer plus tard pour une mission spatiale scientifique encore plus ambitieuse et pas nécessairement au format nanosatellite.
- CubeSat scientifique : le CubeSat peut aussi embarquer un instrument de mesure. L’objectif principal est alors de réaliser cette mesure scientifique. Les applications scientifiques émergent peu à peu, avec une diversification de concepts, comme le CubeSat d’accompagnement d’une mission mère qui peut aller reconnaître le terrain avant de s’approcher d’un astéroïde ou comme les flottilles ou les essaims de nanosatellites pour des mesures "coopératives" (mesures simultanées par plusieurs CubeSats).
- CubeSat d'observation de la Terre / de télédétection : le satellite se concentre sur l'étude de la Terre et son atmosphère. La plupart des CubeSats commerciaux se concentre sur ce type d'applications (Planet Labs et Spire).
- CubeSat de communication : le CubeSat relaie des signaux émis par des stations émettrices vers des stations réceptrices. On retrouve de nombreux CubeSats pédagogiques dans cette catégorie (ITF 2, lancé le 12/2016).
Une tendance à l'embonpoint
Depuis la création de ce standard, le nombre de lancements a fortement augmenté au fil des ans. Cette tendance ne fait que se confirmer avec les nombreux nouveaux acteurs du marché, qu'ils se placent du côté de la conception de CubeSats ou de leur lancement. Il est intéressant de noter que si les CubeSats de petit format (1U, 2U et 3U) ont été privilégiés jusqu'à présent, des formats 12U et 27U sont maintenant envisagés afin d'offrir des profils de mission plus flexibles (missions interplanétaires, plus grosse charge utile) tout en préservant les avantages offerts par la standardisation, faisant varier le profil des CubeSats envoyés.
Nano/microsatellites par secteur (1 - 50 kg)
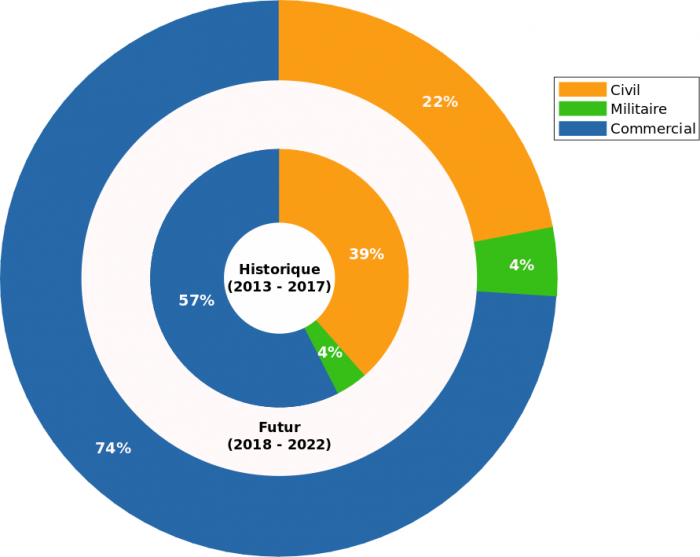
Le secteur commercial est en très forte augmentation, devenant bientôt le secteur dominant les satellites de 1 à 50 kg.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Nano/microsatellites par application (1 - 50 kg)
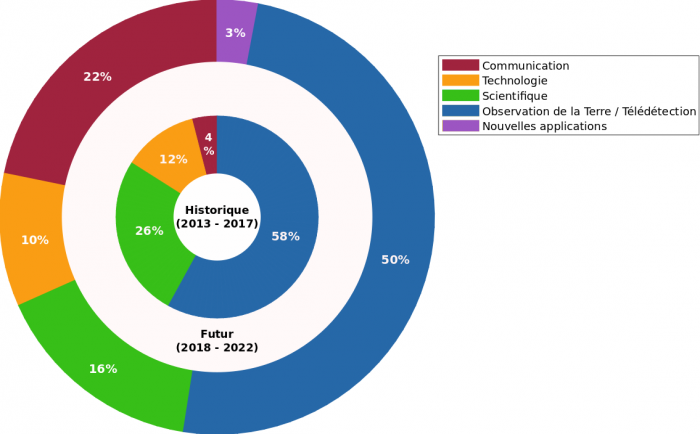
Le format de ces satellites est particulèrement intéressant pour la réalisation de constellations d'observation de la Terre. Les progrès réalisés sur la miniaturisation et les retours d'expérience des premières missions poussent les acteurs à considérer sérieusement leur utilisation dans un but scientifique.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Lancements des nano/microsatellites
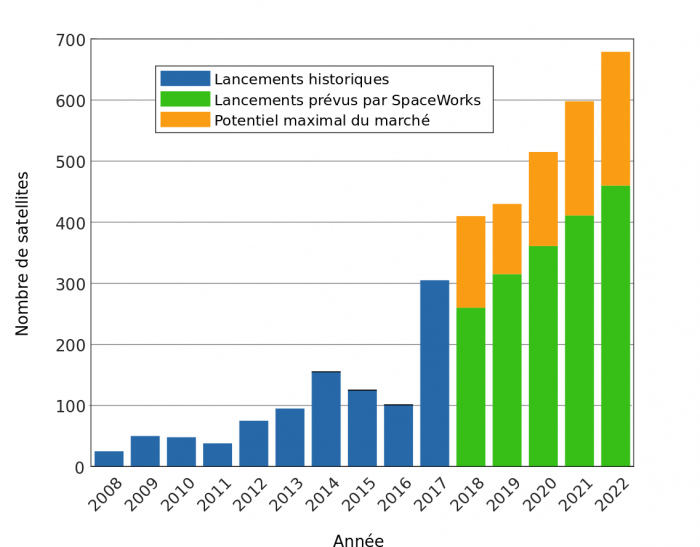
Après deux années de stagnation majoritairement due à des retards de lancement, l'année 2017 a vu une forte augmentation du nombre de lancements. Cela correspond à la croissance attendue pour ce marché, avec près de 2600 lancements attendus d'ici 5 ans.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Evolution de la taille des nanosatellites
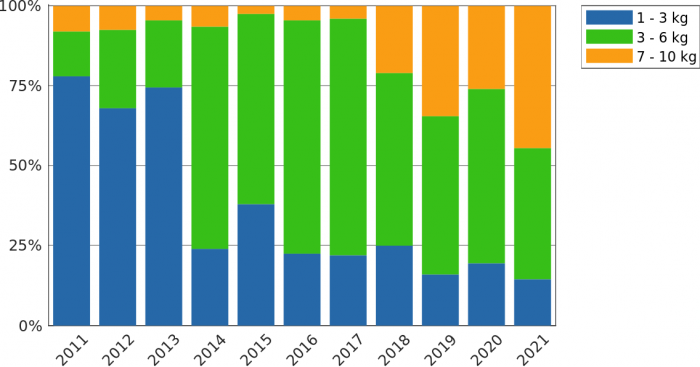
On constate une augmentation de la taille des nanosatellites afin de répondre aux demandes de charges utiles plus complexes. Néanmoins, le format 3U devrait rester le plus populaire dans les 5 années à venir.
Crédit :
Gary Quinsac / Données de SpaceWorks - Nano/Microsatellite Market Forecast, 2018
Comme nous l'avons vu précédemment, un satellite se décompose en différents sous-systèmes essentiels à son bon fonctionnement :
- la charge utile,
- la structure porteuse,
- le contrôle thermique,
- la génération, le stockage et la distribution d'énergie,
- la télécommunication,
- la télémesure, la télécommande et la localisation,
- le traitement, le stockage et la gestion des données à bord,
- le contrôle d'attitude et d'orbite,
- la propulsion.
Charge utile
La charge utile est le sous-système qui réalise les fonctions correspondant à l'objectif de la mission. Si celle-ci varie fortement d'une mission à l'autre, les éléments suivants qui forment la plate-forme sont généralement présents sur tous les satellites.
Structure porteuse
La structure porteuse a pour but d'assurer l'interface avec le lanceur, la cohésion mécanique du satellite et le support des équipements. Elle est aussi appelée "architecture mécanique". L'intégrité du satellite doit être assurée dans les différents environnements qu'il rencontrera au cours de sa vie, c'est-à-dire le sol, le lancement et l'orbite.
- Au sol, il est victime de sollicitations mécaniques de type quasi-statique lors de la phase d'intégration et l'ensemble de ses composants est soumis à la gravité (1 g au sol), qui peut entraîner des déformations par différence avec l'environnement orbital. Le transport et la manutention peuvent être sources de chocs et de conditions climatiques variables (- 40°C, + 40°C). Les longues périodes de stockage nécessitent un contrôle de l'environnement (pression, température, hygrométrie) afin de ne pas dégrader les caractéristiques des éléments structuraux. A cela s'ajoutent les essais mécaniques qui constituent la source principale de sollicitation mécanique au sol.
- Durant le lancement, différents éléments sont dimensionnants du point de vue mécanique. On peut citer l'allumage des moteurs et le décollage, la pression dynamique et le passage du mur du son, la séparation des propulseurs latéraux à poudre (EAP) ou encore la séparation de la coiffe. Ils sont définis dans les Manuels Utilisateurs des Lanceurs par l'accélération statique continue, les vibrations à basse fréquence, l'environnement acoustique et les chocs dus aux séparations pyrotechniques.
- Lors de sa vie orbitale, le satellite est soumis à un cyclage en température dû aux variations de l'environnement thermique externe et à la dissipation des électroniques internes, générant des gradients thermiques sur la structure. L'utilisation de matériaux organiques, quant à elle, pose des problèmes hygro-élastiques. Une fois dans l'espace (ou même dans la coiffe du lanceur), ces matériaux subissent une déformation liée à la désorption de l'humidité préalablement absorbée au sol. Dernier aspect à ne pas négliger, les vibrations en orbite provoquées par les parties mobiles de certains équipements (roues, gyroscopes, mécanismes d'orientation des générateurs solaires...) peuvent altérer l'alignement d'optiques particulièrement sensibles.
Contrôle thermique
Le contrôle thermique a pour fonction de maintenir les équipements dans leur plage de température de fonctionnement, quelle que soit la phase de la mission, et ce durant toute la durée de vie du satellite. Dans le cas de missions nécessitant une grande précision astrométrique, le contrôle thermique permet également d'uniformiser les températures afin d'assurer une stabilité dimensionnelle (et ainsi éviter des phénomènes de dilatation/contraction par exemple). Pour ce faire, on peut faciliter ou interdire certains échanges thermiques de façon passive, ou utiliser des actionneurs (des réchauffeurs pour réchauffer ou des radiateurs pour refroidir) pour réguler la température. Ce contrôle thermique s'effectue dans des conditions très particulières, celles du milieu spatial, qui limitent le nombre d'acteurs. Nous pouvons classer les acteurs en deux catégories : les sources froides et les sources chaudes.
- Le Soleil, qui génère au voisinage de la Terre un flux de 1500W/m2, est l'une des sources chaudes. Son flux décroît en 1/D2, D étant la distance au Soleil. Pour une sonde spatiale s'éloignant fortement du Soleil, l'impact du flux solaire décroîtra donc rapidement.
- Les planètes, telles que la Terre, sont elles aussi des sources chaudes. Elles réfléchissent le flux solaire, c'est ce que l'on appelle le flux albédo. Elles émettent également directement un rayonnement.
- Les surfaces externes du satellite se refroidissent en émettant un rayonnement vers le fond du ciel (partie du ciel sans le Soleil et les planètes) qui n'est pas réfléchi vers le satellite. Néanmoins, l'espace est à l'origine d'un rayonnement dont le spectre correspond à un corps noir à 3 K. Ce rayonnement, appelé fond diffus cosmologique, est le vestige d'une phase importante de notre univers : sa réionisation 380 000 ans après le Big Bang. Cela veut dire que le fond du ciel consitue un puits radiatif infini et qu'un corps inerte dans l'espace tend vers une température d'équilibre de 3 K.
Complément : modes de transfert d'énergie
Il existe trois modes de transfert d'énergie :
- Le transfert par conduction est l'échange d'énergie, sous l'effet d'une différence de température, entre deux corps en contact physique ou au sein d'un même corps solide.
- La convection thermique désigne l'échange d'énergie à l'interface d'un fluide en mouvement sous l'effet d'une différence de température. L'absence de fluide conducteur (air) dans l'espace empêche ce type de transfert thermique vers l'extérieur du satellite.
- Le transfert radiatif (ou transfert par rayonnement) représente l'unique transfert possible avec l'espace. Il représente le transfert d'énergie par radiation et implique l'interaction du rayonnement avec la matière.
Génération d'énergie
La génération d'énergie permet le fonctionnement de l'engin spatial en lui fournissant l'énergie électrique dont il a besoin. En effet, ce dernier étant mobile et autonome, il a besoin de produire son électricité. Le système d'alimentation électrique est découpé en quatre éléments qui sont la production (ou source primaire), le stockage (ou source secondaire), la régulation et la distribution.
- La production électrique utilise généralement le flux solaire grâce à des générateurs solaires placés sur la structure du satellite. Ces générateurs solaires, aussi appelés panneaux solaires, peuvent être déployables afin d'offrir une grande surface d'accumulation malgré un volume restreint dans la coiffe du lanceur. Des cellules solaires assurent la conversion de l'énergie lumineuse en énergie électrique, avec un certain rendement. Outre l'énergie solaire, des missions lointaines pilotées par les agences américaine ou russe ont également utilisé des générateurs nucléaires ou isotopiques (sonde Cassini-Huygens).
- L'énergie produite est ensuite stockée dans les batteries électrochimiques afin d'alimenter le satellite lors de phases d'éclipse ou de consommation instantanée supérieure à la production des générateurs.
- La régulation et la distribution permettent de fournir à la charge utile et aux autres éléments nécessitant de l'énergie une alimentation présentant des caractéristiques électriques précises et compatibles avec les différents équipements. La régulation permet également de garantir la durée de vie de la batterie. Pour ce faire, on limite la profondeur de décharge, c'est-à-dire la quantité d'énergie fournie par la batterie, on limite le courant de charge et de décharge...
Ce sous-système occupe usuellement entre 20 % et 30 % de la masse sèche (réservoirs vides d'ergols) d'un satellite classique.
Télécommunication
Le sous-système de télécommunication utilise des émetteurs, des récepteurs ou des transpondeurs afin de gérer l'ensemble des fonctions de communication. S'il s'agit d'un satellite de communication, ce sous-système peut alors devenir la charge utile du satellite.
Télémesure, télécommande et localisation
Les équipements de télémesure, télécommande et localisation constituent un ensemble de télécommunications de servitude transmettant au sol les télémesures de différents paramètres soumis à contrôle (température d'un équipement, charge d'une batterie) et recevant les télécommandes pour les équipements à opérer (plate-forme et charge utile).
Chaîne de traitement, de stockage et de gestion bord
Les informations transitant dans le satellite sont prises en charge par la chaîne de traitement, de stockage et de gestion bord. Ce sous-système s'assure de la bonne distribution des données vers les équipements. Il est également en charge du stockage des données avant que celles-ci soient transmises, généralement à une station sol.
Système de contrôle d'attitude et d'orbite
Le système de contrôle d'attitude et d'orbite (SCAO) assure deux types de mouvement : celui autour de son centre de gravité (attitude) et celui de son centre de gravité (orbite). En d'autres termes, il est responsable de l'orientation et de la position du satellite dans l'espace. En fonction de l'attitude recherchée, les commandes d'attitude impriment les corrections d'orientation autour du centre de gravité. Le maintien du satellite sur l'orbite prévue est indispensable à la plupart des missions. Le sous-système de propulsion crée les incréments de vitesse nécessités par les manœuvres d'orbite. Celles-ci sont commandées depuis le sol, ou déterminées à bord, la détermination d'orbite à bord étant aujourd'hui rendue possible par les navigateurs embarqués qui permettent d'accroître l'autonomie des satellites.
Propulsion
La propulsion, enfin, fonctionne de pair avec le SCAO. Elle est un actionneur du SCAO, assez complexe pour être traité séparément, qui a pour fonction de créer les variations de vitesse nécessaires aux manœuvres du satellite.
Aller plus loin
Schéma éclaté du CubeSat ArduSat3
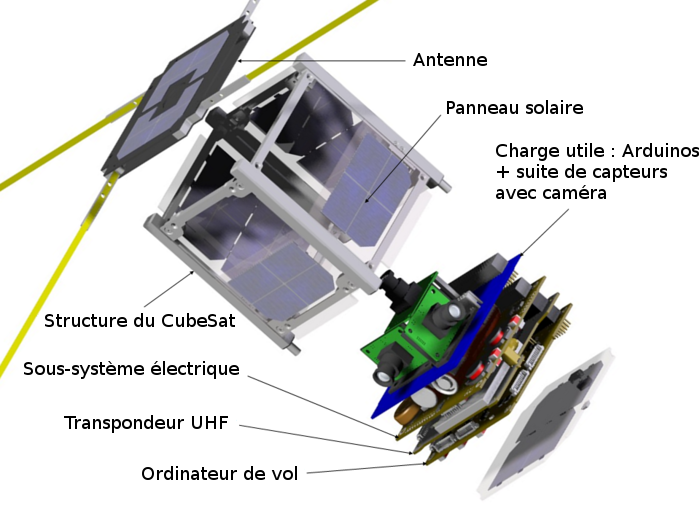
On retrouve une partie des sous-systèmes classiques d'un satellite sur ce CubeSat 1U. On remarque également qu'ils se présentent généralement sous la forme de cartes disposées les unes après les autres dans la structure du CubeSat.
Crédit :
Wikipedia
GOMX-3 un satellite de démonstration téchnologique
GOMX-3 est une collaboration entre l'ESA et GOMspace (Danemark) embarquant différentes charges utiles de démonstration technologique :
- un contrôle d'attitude 3 axes avec 1 degré de précision, permettant jusqu'à 7 changements d'attitude par orbite et un suivi de cible,
- un récepteur expérimental pour détecter les signaux ADS-B (Automatic Dependent Surveillance-Broadcast) diffusés par les avions en vol,
- une radio réalisée par logiciels pour évaluer les faisceaux de réception des satellites de télécommunication,
- un émetteur bande-X développé par Syrlinks pour télécharger des données à haut débit.
Focus sur l'émetteur bande-X
De nombreux types de missions sont maintenant rendus possibles par la miniaturisation des charges utiles, qu'elles soient scientifiques ou technologiques. L'une des principales limitations de ces missions en orbite basse est le volume de données pouvant être téléchargées par orbite. Actuellement, les CubeSats embarquent des sous-systèmes de télémétrie UHF et bande-S qui permettent de télécharger jusqu'à quelques centaines de mégaoctets (Mo) par jour. Ce volume de données est limité par la durée de visibilité entre la station sol et l'antenne du satellite ainsi que le débit (~100 ko/s en UHF et ~1Mo/s en bande-S). Afin d'augmenter les taux de transmission tout en restant compatible avec les stations sol existantes, le CNES et l'ESA ont voulu tester un émetteur-récepteur en bande-S et un émetteur en bande-X, tous deux miniaturisés pour le format CubeSat. L'émetteur en bande-X permet des débits de l'ordre de plusieurs Go par survol d'une station sol compatible bande-X (entre 3,4 et 5 m dans ce cas), tout en étant adapté aux dimensions d'un CubeSat-3U (< 10 W et 300 g pour le sous-système).
Après une année d'opération, le satellite a effectué sa ré-entrée atmosphérique. Tous les objectifs ont été atteints et la mission nominale a même été dépassée, permettant de démontrer d'autres capacités.
QB50 une flotte de CubeSats scientifiques universitaires
L'objectif de la mission QB50 est de démontrer la possibilité de lancer un réseau de satellites construits par des équipes universitaires à travers le monde pour effectuer une étude scientifique de la basse thermosphère. De nombreux enjeux du standard CubeSat se retrouvent à travers les différents objectifs de cette mission :
- faciliter l'accès à l'espace pour des missions spatiales à petite échelle,
- étudier la couche la moins explorée de l'atmosphère (entre 200 et 380 km),
- effectuer des démonstrations technologiques avec certains CubeSats, notamment QARMAN (étude de la rentrée atmosphérique) et InflateSail (test d'une voile solaire),
- permettre à des étudiants en ingénierie de concevoir et construire ces satellites.
Focus sur l'étude scientifique de la thermosphère
La majeure partie des CubeSats de QB50 a comme objectif scientifique d'effectuer des mesures in-situ en de nombreux points de la thermosphère. Par le passé, cette région a été étudiée par des satellites aux orbites très elliptiques (périgée à 200 km et apogée à 3000 km), ne permettant de passer que quelques dizaines de minutes dans la zone d'étude. Les différentes techniques actuelles sont limitées. Les fusée-sondes ("sounding rockets") permettent d'obtenir des mesures durant quelques minutes et le long d'une unique colonne. Des mesures à distance sont faites depuis le sol et des orbites plus élevées, typiquement entre 600 et 800 km. L'environnement est sondé grâce à la diffusion d'un signal de référence. De telles mesures sont rendues difficiles par la raréfaction de l'atmosphère dans la basse thermosphère qui empêche d'obtenir des signaux de retour de qualité. Le moindre coût des CubeSats permet d'accepter la très courte durée de vie inhérente à une orbite très basse, offrant une étude in-situ d'une période de plusieurs mois. Trois types d'instruments sont répartis parmi les satellites (un type par CubeSat), offrant ainsi une étude poussée des différents paramètres régissant le comportement de cette région de l'espace.
Autres missions
De nombreux projets de CubeSats sont développés dans le cadre de C2ERES (Campus et Centre de Recherche pour l’Exploration Spatiale), le pôle spatial de l'Université de Recherche PSL conjointement piloté par le LabEx ESEP et le Master OSAE. En août 2017, on en dénombre pas moins de 8, à des stades de développement différents :
- PICSAT, surveillance de l'exoplanète Beta Pictoris b
- METEORIX, spectre UV des météores pour analyser la composition des météoroïdes
- SERB, précurseur pour la surveillance de la variabilité solaire
- GPU4SPACE, qualification spatiale d'un GPU
- NANOPOT, Tests pour la maîtrise du potentiel électrique d'un nanosatellite
- OGMS-SA, un instrument d'astrochimie spatiale
- BIRDY-T, développement technologique pour la navigation autonome
- CIRCUS, étude de l'ionosphère avec STAR, une technologie nouvelle
Aller plus loin
GomX-3
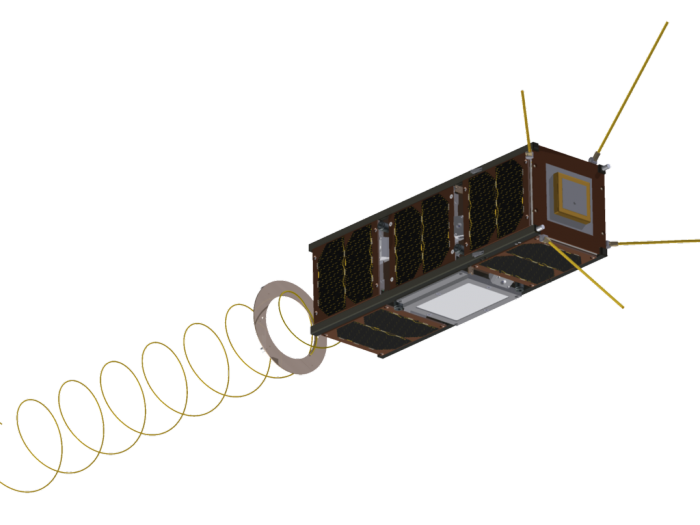
Illustration du CubeSat GomX-3 (3U) développé par GOMspace.
Crédit :
GomSpace
Lancements des CubeSats du programme QB50
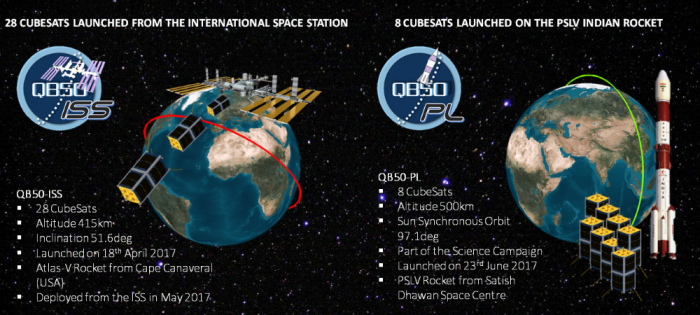
En août 2017, 36 CubeSats du programme QB50 ont été lancés : 28 depuis la station spatiale internationale et 8 par le lanceur indien PSLV.
Crédit :
QB50
Le contrôle d'attitude et d'orbite concerne tous les aspects nécessaires à la maîtrise de l'orientation et de la trajectoire du satellite. Il comprend :
- la prise en compte des phénomènes physiques gouvernant le déplacement du satellite;
- les méthodes pour mesurer l'état du satellite;
- la détermination des lois de contrôle et leur implémentation;
- les technologies nécessaires afin de produire ces actions de contrôle.
L'ensemble s'appelle le système de contrôle d'attitude et d'orbite (SCAO). Il se compose de différents éléments :
- les capteurs ou détecteurs, permettant de restituer les vitesses et positions angulaires définissant l'attitude,
- l'électronique et l'informatique de bord, chargées du traitement des informations provenant des capteurs,
- les actionneurs, permettant de maintenir une attitude, changer de pointage ou encore modifier les vitesses angulaires,
Le SCAO est l'un des sous-systèmes essentiels de la plupart des satellites. L'une de ses raisons d'être est l'existence de perturbations agissant sur un satellite via des couples ou forces extrêmement faibles qu'il faut utiliser ou compenser. Si rien n'entrave ces phénomènes, les conséquences de ces effets deviennent rapidement significatives. Ces perturbations peuvent être externes (c'est-à-dire causées par des phénomènes extérieurs au satellite) ou internes (c'est-à-dire liées à des mécanismes ou déplacements propres au satellite).
Au sein du SCAO, on a pour habitude de distinguer le contrôle d'attitude du contrôle d'orbite de la manière suivante :
- le Système de Contrôle de l'Attitude (SCA), qui concerne la maîtrise de l'attitude, c'est-à-dire l'orientation du satellite ou de son mouvement autour du centre d'inertie,
- le système de Guidage, Navigation et Contrôle (GNC) est lui en charge de la trajectoire du centre d'inertie du satellite et donc des paramètres orbitaux du véhicule spatial.
Dans la suite de ce cours nous insisterons sur le SCA, même si nous reviendrons par moments sur le système GNC. Il faut bien comprendre que les deux sont généralement développés de manière indépendante et gérés de façon autonome. Le SCAO dans son ensemble est en interaction avec les autres éléments du satellite. Ces interactions sont à l'origine de nombreuses contraintes essentielles lors du développement du SCAO.
 Définitions
Définitions
Quelques définitions sont importantes à ce stade.
- Détermination d'attitude : connaissance de l'orientation du satellite par rapport à un référentiel
- Contrôle d'attitude : processus permettant d'atteindre et de maintenir l'orientation ou le taux de changement d'orientation désiré
- Navigation : connaissance de la position et de la vitesse du satellite par rapport à un référentiel
- Contrôle d'orbite : processus permettant d'atteindre et de maintenir l'orbite désirée
- Guidage : séquence de commande depuis l'état (attitude ou position orbitale) actuel à un état désiré
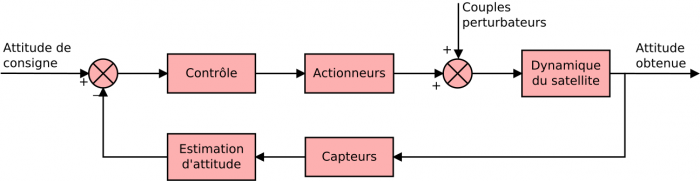
Digramme en bloc d'un SCAO
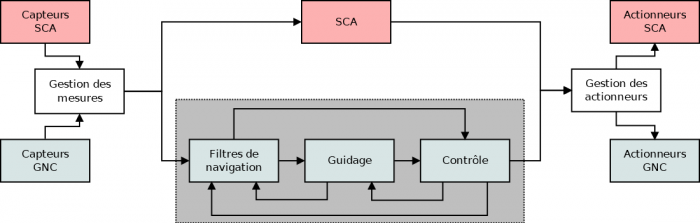
Diagramme en bloc d'un système de contrôle d'attitude et d'orbite.
Crédit :
Gary Quinsac
Relations fonctionnelles du SCAO
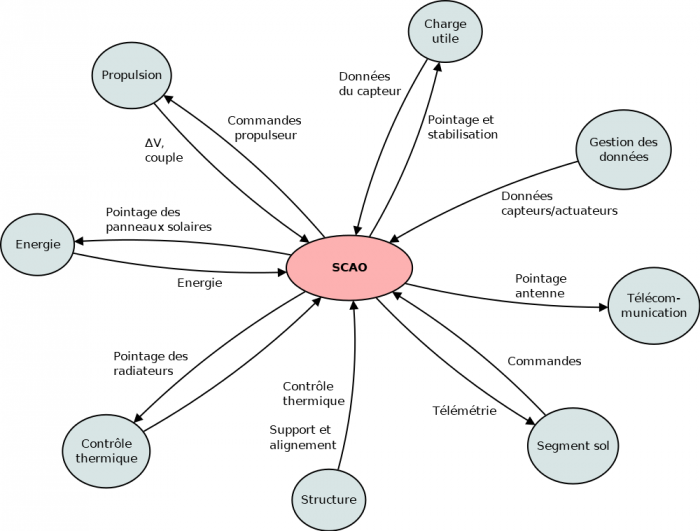
Schéma des relations fonctionnelles entre le système de contrôle d'attitude et d'orbite et les autres sous-systèmes du satellite.
Crédit :
Gary Quinsac
Le sous-système en charge de l'attitude du satellite se nomme le système de détermination et de contrôle d'attitude (SCA). Il a différents rôles en fonction des modes du satellite. Il doit :
- fournir un contrôle du spin et un pointage pour la charge utile, l'énergie, la communication et les systèmes de régulation thermique dans les modes nominal et de survie,
- fournir un contrôle de l'attitude et de son taux de variation pour le transfert orbital et le maintien à poste,
- fournir une connaissance de l'attitude suffisamment précise pour mener à bien les objectifs de la mission.
La détermination et le contrôle d'attitude nécessitent plusieurs outils qui seront développés dans la suite du cours.
Représentation d'attitude
L'attitude du satellite est exprimée par l'orientation de son repère par rapport à un référentiel standard (inertiel, orbital, fixé par rapport à un objet...), comme détaillé dans le chapitre sur la représentation d'attitude. Plusieurs outils existent, de la matrice du cosinus directeur aux quaternions, en passant par les angles d'Euler.
Détermination d'attitude
La détermination ou estimation d'attitude fait le liant entre les mesures fournies par les différents capteurs présents à bord du satellite et la connaissance de l'attitude. La détermination d'attitude nécessite au moins deux mesures de directions bien séparées. Il faut ici différencier les techniques de détermination directe d'attitude des techniques d'estimation :
- les approches directes calculent la matrice de transformation directement à partir des vecteurs de mesure,
- les techniques d'estimation nécessitent une connaissance initiale grossière de l'attitude et une estimation des sources d'erreur de mesure. Les techniques d'estimation peuvent incorporer plusieurs types de capteurs, prendre en compte des statistiques d'erreur et sont généralement plus précises que les méthodes dites "directes".
Contrôle d'attitude
Le contrôle d'attitude rentre dans le domaine de la théorie du contrôle. Des lois de contrôle doivent être implémentées afin d'amener le système d'un état initial donné à un état final souhaité, tout en respectant certains temps de réponse. Les asservissements mis en oeuvre doivent être les moins sensibles possible vis-à-vis des perturbations, qu'elles soient internes ou externes. Des actionneurs sont enfin chargés d'appliquer les corrections d'attitude ainsi déterminées.
Une distinction importante doit être effectuée entre les contrôles d'attitude passif et actif.
- Le contrôle d'attitude passif se base sur l'utilisation des propriétés physiques du satellite et de son environnement pour contrôler l'attitude du véhicule. Cette technique exige un matériel moins complexe et généralement moins coûteux. Nous ne rentrerons pas dans le détail de ces techniques, mais l'on peut tout de même citer le contrôle d'attitude par gradient de gravité
- le contrôle d'attitude actif, en revanche, est plus sophistiqué. Il permet d'obtenir des performances supérieures, c'est-à-dire des pointages beaucoup plus précis et des manœuvres plus rapides.
Boucle SCA
Boucle de contrôle d'attitude.
Crédit :
Gary Quinsac
Lorsque l'on s'intéresse à l'orbite du satellite, on parle alors de guidage, navigation et contrôle (GNC). C'est une branche de l'ingénierie consacrée à la conception des systèmes de contrôle des véhicules (automobiles, bateaux, avions et satellites). La navigation répond à la question "où sommes-nous ?", le guidage à la question "comment aller à notre destination ?" et le contrôle "quelle commande donner au véhicule ?". En somme, cela concerne la détermination d'orbite et la majeure partie du contrôle, à l'exception de la réalisation du contrôle qui est prise en charge par le sous-système de propulsion. Ce sous-système joue un rôle essentiel dans le succès des missions qui impliquent un rendez-vous, de l'arrimage ("docking") et des opérations de proximité. Le logiciel de GNC se compose d'un filtre de navigation, d'un algorithme de guidage et d'un algorithme de contrôle. Ce sous-système doit ainsi :
- fournir la position et la vitesse du satellite pour pointer les antennes et la charge utile,
- fournir l'instant, la magnitude, la durée et la direction des poussées pour effectuer un transfert orbital et un maintien à poste,
- fournir la position des autres corps pour piloter les éléments mobiles du satellite.
Il ne faut pas confondre le système GNC embarqué avec le système de dynamique de vol qui fait partie du segment sol. Le GNC doit faire face à des contraintes temporelles et de calcul beaucoup plus fortes, ce qui conduit généralement à des performances des logiciels en vol insuffisantes. Un suivi depuis le sol peut se faire a posteriori et ainsi fournir une mise à jour de paramètres tels que la trajectoire de référence. Les exigences du système GNC dépendent fortement du niveau d'autonomie attendu. L'autonomie à bord permet au segment spatial de continuer les opérations de mission et de survivre à des situations critiques sans avoir recours au segment sol. Plus l'autonomie est importante plus les coûts de développement sont importants, mais les coûts d'opération diminuent. De même, dans le cas de missions interplanétaires, la rareté des canaux de communication peut être une motivation pour limiter les interactions avec le segment sol. Rares ont été les satellites autonomes sur ce plan, même si nous pouvons citer SMART-1 de l'ESA et Deep Space 1 de la NASA. Dans la plupart des cas, une majeure partie des étapes nécessaires au contrôle d'orbite sont effectuées par le segment sol avant que des télécommandes soient transmises au satellite.
Navigation
À la manière de l'estimation d'attitude, l'objectif est d'obtenir une estimation de la position orbitale satisfaisant les exigences de la mission. La navigation est généralement implémentée sous la forme d'un filtre numérique joué par l'ordinateur de bord.
Guidage
Le guidage se sert de l'estimation fournie par la navigation et de la consigne mission pour calculer certains des points suivants :
- les manœuvres pour atteindre l'objectif, qu'elles soient impulsionnelles (ΔV en sortie de la fonction) ou continues (profil de poussée en sortie de la fonction),
- la trajectoire de référence (position et vitesse) pour une période future,
- les éphémérides nécessaires au bon fonctionnement d'autres sous-systèmes, basées sur la nouvelle trajectoire.
La trajectoire de référence est calculée par le segment sol et peut être mise à jour durant la mission. Les écarts à cette référence doivent rester suffisamment faibles afin que le guidage puisse les compenser au moyen de faibles variations du profil de poussée. Ces écarts peuvent être dus à des perturbations extérieures, des erreurs d'exécution de manœuvre, des incertitudes de navigation ou des délais opérationnels.
Contrôle
En s'appuyant sur l'estimation de l'état du véhicule (position, vitesse) fournie par le filtre de navigation et sur la trajectoire de référence calculée par la fonction de guidage, la fonction de contrôle s'assure de la bonne exécution de la manœuvre et corrige les erreurs résiduelles. La fonction de contrôle traduit donc les manœuvres reçues en entrée dans le format exigé par la fonction qui s'occupe de la gestion des actionneurs.
Dans le cas de propulseurs, le contrôle établit des forces dans le référentiel du satellite qui seront obtenues en contrôlant le niveau de poussée durant une durée déterminée ou en contrôlant la durée d'une poussée de puissance constante. Une fonction de gestion de la propulsion se chargera de sélectionner le propulseur optimal pour fournir la force ainsi que de fournir les couples réclamés par la fonction de contrôle de l'attitude du satellite.
Digramme en bloc d'un SCAO
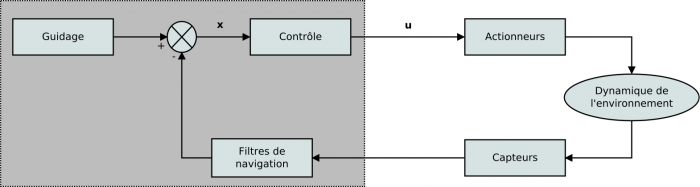
Boucle de contrôle d'un système GNC.
Crédit :
Gary Quinsac
Sonde SMART-1

Vue d'artiste de la sonde spatiale SMART-1 sur le chemin de la Lune. Elle était équipée d'un système de propulsion ionique et d'un système de GNC autonome.
Crédit :
ESA
Une fois séparé du lanceur, le satellite va parcourir une série de modes jusqu’à la fin de la mission. Des modes nominaux vont lui permettre de maintenir son attitude, atteindre son poste, déployer ses panneaux solaires et son antenne, le tout afin de se mettre en ordre de marche pour sa mission. Si nécessaire, ces modes d’opération peuvent être interrompus afin de réaliser son maintien à poste, la décharge du moment cinétique des roues à inertie ou répondre à un incident. Différents équipements sont utilisés en fonction de ces modes et certains sont cités en exemple dans la figure 1. On associe aux modes des exigences qui découlent des exigences mission, par exemple :
- Les exigences sur la détermination d'attitude dérivent de plusieurs exigences mission, notamment celle de décrire correctement la position d'une observation dans l'espace, ou peuvent découler d'une allocation d'une exigence de pointage de plus haut niveau (par exemple, afin de pointer un objet avec une certaine précision on a besoin de déterminer l'attitude avec telle précision).
- Parmi les exigences de pointage, on peut citer la définition de la cible et de ce qui doit la pointer (sous-système, instrument etc.). Les exigences peuvent ensuite être classées en 2 catégories : la précision et la stabilité de pointage.
- La précision de pointage est une partie du budget total de pointage de la charge utile, dans lequel se trouvent également des effets mécaniques, thermiques et de mesure.
- La stabilité de pointage découle habituellement des exigences de résolution des instruments. En effet, des mouvements à haute fréquence du satellite ont tendance à dégrader la résolution.
- L'agilité du satellite est souvent nécessaire à une mission pour passer d'un pointage à un autre en un certain temps. Ces exigences ont tendance à contraindre le choix des actionneurs et des méthodes de contrôle.
- La phase dite d'acquisition concerne les satellites équipés de panneaux solaires pour la génération d'énergie. Elle intervient au tout début de la mission, une fois que le satellite est séparé du lanceur, et consiste à stabiliser le satellite et à pointer ses panneaux solaires vers le Soleil avant que ses batteries ne se soient vidées. La connaissance précise du lanceur est essentielle afin de prendre en compte l'ensemble des conditions initiales possibles lors de la conception.
- Des exigences concernent églament la fiabilité et la survie. Il faut déterminer le niveau de fiabilité/redondance nécessaire pour récupérer d'anomalies, ce que le SCAO doit faire en réponse à une anomalie...
Modes SCAO
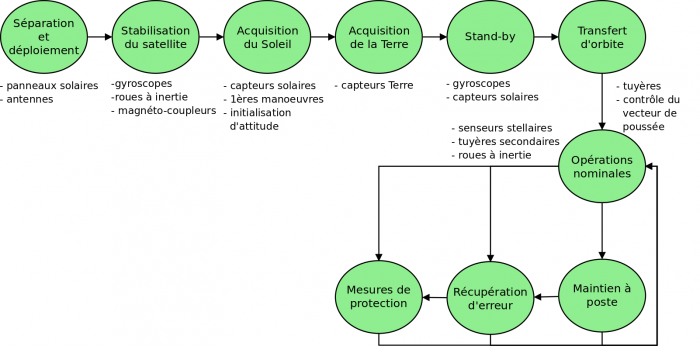
Modes SCAO typiques avec des exemples associés. Après une phase d'initialisation débutée par la séparation et le déploiement et conclue par le transfert d'orbite, le satellite entre dans un mode d'opérations nominales.
Crédit :
Gary Quinsac