| Introduction | Structures planétaires | Observables | Techniques et méthodes | Lieux de vie | Auteurs | Boite à outils |
Système de Contrôle d'Attitude |
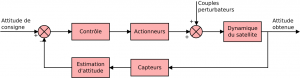
Le sous-système en charge de l'attitude du satellite se nomme le système de détermination et de contrôle d'attitude (SCA). Il a différents rôles en fonction des modes du satellite. Il doit :
La détermination et le contrôle d'attitude nécessitent plusieurs outils qui seront développés dans la suite du cours.
L'attitude du satellite est exprimée par l'orientation de son repère par rapport à un référentiel standard (inertiel, orbital, fixé par rapport à un objet...), comme détaillé dans le chapitre sur la représentation d'attitude. Plusieurs outils existent, de la matrice du cosinus directeur aux quaternions, en passant par les angles d'Euler.
La détermination ou estimation d'attitude fait le liant entre les mesures fournies par les différents capteurs présents à bord du satellite et la connaissance de l'attitude. La détermination d'attitude nécessite au moins deux mesures de directions bien séparées. Il faut ici différencier les techniques de détermination directe d'attitude des techniques d'estimation :
Le contrôle d'attitude rentre dans le domaine de la théorie du contrôle. Des lois de contrôle doivent être implémentées afin d'amener le système d'un état initial donné à un état final souhaité, tout en respectant certains temps de réponse. Les asservissements mis en oeuvre doivent être les moins sensibles possible vis-à-vis des perturbations, qu'elles soient internes ou externes. Des actionneurs sont enfin chargés d'appliquer les corrections d'attitude ainsi déterminées.
Une distinction importante doit être effectuée entre les contrôles d'attitude passif et actif.