Le contrôle d'attitude et d'orbite concerne tous les aspects nécessaires à la maîtrise de l'orientation et de la trajectoire du satellite. Il comprend :
- la prise en compte des phénomènes physiques gouvernant le déplacement du satellite;
- les méthodes pour mesurer l'état du satellite;
- la détermination des lois de contrôle et leur implémentation;
- les technologies nécessaires afin de produire ces actions de contrôle.
L'ensemble s'appelle le système de contrôle d'attitude et d'orbite (SCAO). Il se compose de différents éléments :
- les capteurs ou détecteurs, permettant de restituer les vitesses et positions angulaires définissant l'attitude,
- l'électronique et l'informatique de bord, chargées du traitement des informations provenant des capteurs,
- les actionneurs, permettant de maintenir une attitude, changer de pointage ou encore modifier les vitesses angulaires,
Le SCAO est l'un des sous-systèmes essentiels de la plupart des satellites. L'une de ses raisons d'être est l'existence de perturbations agissant sur un satellite via des couples ou forces extrêmement faibles qu'il faut utiliser ou compenser. Si rien n'entrave ces phénomènes, les conséquences de ces effets deviennent rapidement significatives. Ces perturbations peuvent être externes (c'est-à-dire causées par des phénomènes extérieurs au satellite) ou internes (c'est-à-dire liées à des mécanismes ou déplacements propres au satellite).
Au sein du SCAO, on a pour habitude de distinguer le contrôle d'attitude du contrôle d'orbite de la manière suivante :
- le Système de Contrôle de l'Attitude (SCA), qui concerne la maîtrise de l'attitude, c'est-à-dire l'orientation du satellite ou de son mouvement autour du centre d'inertie,
- le système de Guidage, Navigation et Contrôle (GNC) est lui en charge de la trajectoire du centre d'inertie du satellite et donc des paramètres orbitaux du véhicule spatial.
Dans la suite de ce cours nous insisterons sur le SCA, même si nous reviendrons par moments sur le système GNC. Il faut bien comprendre que les deux sont généralement développés de manière indépendante et gérés de façon autonome. Le SCAO dans son ensemble est en interaction avec les autres éléments du satellite. Ces interactions sont à l'origine de nombreuses contraintes essentielles lors du développement du SCAO.
 Définitions
Définitions
Quelques définitions sont importantes à ce stade.
- Détermination d'attitude : connaissance de l'orientation du satellite par rapport à un référentiel
- Contrôle d'attitude : processus permettant d'atteindre et de maintenir l'orientation ou le taux de changement d'orientation désiré
- Navigation : connaissance de la position et de la vitesse du satellite par rapport à un référentiel
- Contrôle d'orbite : processus permettant d'atteindre et de maintenir l'orbite désirée
- Guidage : séquence de commande depuis l'état (attitude ou position orbitale) actuel à un état désiré
Digramme en bloc d'un SCAO
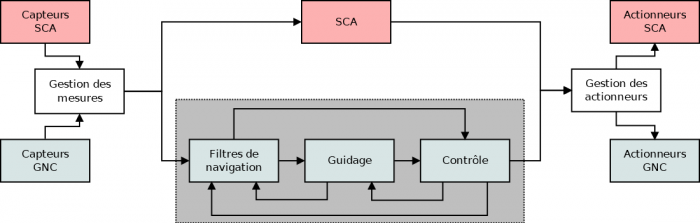
Diagramme en bloc d'un système de contrôle d'attitude et d'orbite.
Crédit :
Gary Quinsac
Relations fonctionnelles du SCAO
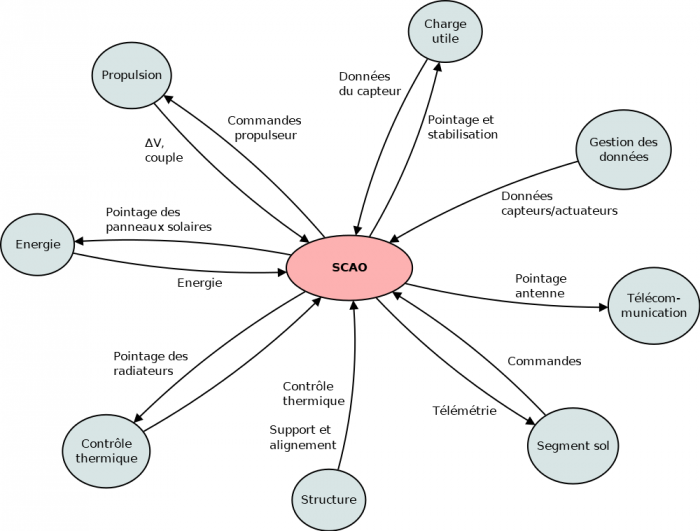
Schéma des relations fonctionnelles entre le système de contrôle d'attitude et d'orbite et les autres sous-systèmes du satellite.
Crédit :
Gary Quinsac
Le sous-système en charge de l'attitude du satellite se nomme le système de détermination et de contrôle d'attitude (SCA). Il a différents rôles en fonction des modes du satellite. Il doit :
- fournir un contrôle du spin et un pointage pour la charge utile, l'énergie, la communication et les systèmes de régulation thermique dans les modes nominal et de survie,
- fournir un contrôle de l'attitude et de son taux de variation pour le transfert orbital et le maintien à poste,
- fournir une connaissance de l'attitude suffisamment précise pour mener à bien les objectifs de la mission.
La détermination et le contrôle d'attitude nécessitent plusieurs outils qui seront développés dans la suite du cours.
Représentation d'attitude
L'attitude du satellite est exprimée par l'orientation de son repère par rapport à un référentiel standard (inertiel, orbital, fixé par rapport à un objet...), comme détaillé dans le chapitre sur la représentation d'attitude. Plusieurs outils existent, de la matrice du cosinus directeur aux quaternions, en passant par les angles d'Euler.
Détermination d'attitude
La détermination ou estimation d'attitude fait le liant entre les mesures fournies par les différents capteurs présents à bord du satellite et la connaissance de l'attitude. La détermination d'attitude nécessite au moins deux mesures de directions bien séparées. Il faut ici différencier les techniques de détermination directe d'attitude des techniques d'estimation :
- les approches directes calculent la matrice de transformation directement à partir des vecteurs de mesure,
- les techniques d'estimation nécessitent une connaissance initiale grossière de l'attitude et une estimation des sources d'erreur de mesure. Les techniques d'estimation peuvent incorporer plusieurs types de capteurs, prendre en compte des statistiques d'erreur et sont généralement plus précises que les méthodes dites "directes".
Contrôle d'attitude
Le contrôle d'attitude rentre dans le domaine de la théorie du contrôle. Des lois de contrôle doivent être implémentées afin d'amener le système d'un état initial donné à un état final souhaité, tout en respectant certains temps de réponse. Les asservissements mis en oeuvre doivent être les moins sensibles possible vis-à-vis des perturbations, qu'elles soient internes ou externes. Des actionneurs sont enfin chargés d'appliquer les corrections d'attitude ainsi déterminées.
Une distinction importante doit être effectuée entre les contrôles d'attitude passif et actif.
- Le contrôle d'attitude passif se base sur l'utilisation des propriétés physiques du satellite et de son environnement pour contrôler l'attitude du véhicule. Cette technique exige un matériel moins complexe et généralement moins coûteux. Nous ne rentrerons pas dans le détail de ces techniques, mais l'on peut tout de même citer le contrôle d'attitude par gradient de gravité
- le contrôle d'attitude actif, en revanche, est plus sophistiqué. Il permet d'obtenir des performances supérieures, c'est-à-dire des pointages beaucoup plus précis et des manœuvres plus rapides.
Boucle SCA
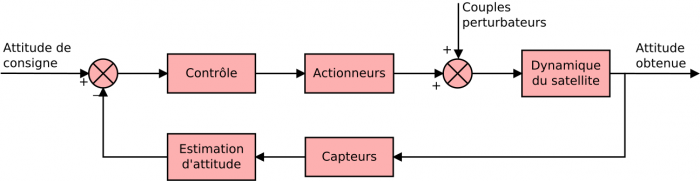
Boucle de contrôle d'attitude.
Crédit :
Gary Quinsac
Lorsque l'on s'intéresse à l'orbite du satellite, on parle alors de guidage, navigation et contrôle (GNC). C'est une branche de l'ingénierie consacrée à la conception des systèmes de contrôle des véhicules (automobiles, bateaux, avions et satellites). La navigation répond à la question "où sommes-nous ?", le guidage à la question "comment aller à notre destination ?" et le contrôle "quelle commande donner au véhicule ?". En somme, cela concerne la détermination d'orbite et la majeure partie du contrôle, à l'exception de la réalisation du contrôle qui est prise en charge par le sous-système de propulsion. Ce sous-système joue un rôle essentiel dans le succès des missions qui impliquent un rendez-vous, de l'arrimage ("docking") et des opérations de proximité. Le logiciel de GNC se compose d'un filtre de navigation, d'un algorithme de guidage et d'un algorithme de contrôle. Ce sous-système doit ainsi :
- fournir la position et la vitesse du satellite pour pointer les antennes et la charge utile,
- fournir l'instant, la magnitude, la durée et la direction des poussées pour effectuer un transfert orbital et un maintien à poste,
- fournir la position des autres corps pour piloter les éléments mobiles du satellite.
Il ne faut pas confondre le système GNC embarqué avec le système de dynamique de vol qui fait partie du segment sol. Le GNC doit faire face à des contraintes temporelles et de calcul beaucoup plus fortes, ce qui conduit généralement à des performances des logiciels en vol insuffisantes. Un suivi depuis le sol peut se faire a posteriori et ainsi fournir une mise à jour de paramètres tels que la trajectoire de référence. Les exigences du système GNC dépendent fortement du niveau d'autonomie attendu. L'autonomie à bord permet au segment spatial de continuer les opérations de mission et de survivre à des situations critiques sans avoir recours au segment sol. Plus l'autonomie est importante plus les coûts de développement sont importants, mais les coûts d'opération diminuent. De même, dans le cas de missions interplanétaires, la rareté des canaux de communication peut être une motivation pour limiter les interactions avec le segment sol. Rares ont été les satellites autonomes sur ce plan, même si nous pouvons citer SMART-1 de l'ESA et Deep Space 1 de la NASA. Dans la plupart des cas, une majeure partie des étapes nécessaires au contrôle d'orbite sont effectuées par le segment sol avant que des télécommandes soient transmises au satellite.
Navigation
À la manière de l'estimation d'attitude, l'objectif est d'obtenir une estimation de la position orbitale satisfaisant les exigences de la mission. La navigation est généralement implémentée sous la forme d'un filtre numérique joué par l'ordinateur de bord.
Guidage
Le guidage se sert de l'estimation fournie par la navigation et de la consigne mission pour calculer certains des points suivants :
- les manœuvres pour atteindre l'objectif, qu'elles soient impulsionnelles (ΔV en sortie de la fonction) ou continues (profil de poussée en sortie de la fonction),
- la trajectoire de référence (position et vitesse) pour une période future,
- les éphémérides nécessaires au bon fonctionnement d'autres sous-systèmes, basées sur la nouvelle trajectoire.
La trajectoire de référence est calculée par le segment sol et peut être mise à jour durant la mission. Les écarts à cette référence doivent rester suffisamment faibles afin que le guidage puisse les compenser au moyen de faibles variations du profil de poussée. Ces écarts peuvent être dus à des perturbations extérieures, des erreurs d'exécution de manœuvre, des incertitudes de navigation ou des délais opérationnels.
Contrôle
En s'appuyant sur l'estimation de l'état du véhicule (position, vitesse) fournie par le filtre de navigation et sur la trajectoire de référence calculée par la fonction de guidage, la fonction de contrôle s'assure de la bonne exécution de la manœuvre et corrige les erreurs résiduelles. La fonction de contrôle traduit donc les manœuvres reçues en entrée dans le format exigé par la fonction qui s'occupe de la gestion des actionneurs.
Dans le cas de propulseurs, le contrôle établit des forces dans le référentiel du satellite qui seront obtenues en contrôlant le niveau de poussée durant une durée déterminée ou en contrôlant la durée d'une poussée de puissance constante. Une fonction de gestion de la propulsion se chargera de sélectionner le propulseur optimal pour fournir la force ainsi que de fournir les couples réclamés par la fonction de contrôle de l'attitude du satellite.
Digramme en bloc d'un SCAO
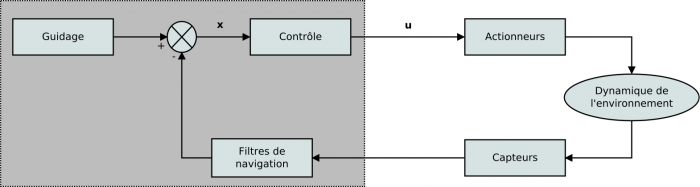
Boucle de contrôle d'un système GNC.
Crédit :
Gary Quinsac
Sonde SMART-1

Vue d'artiste de la sonde spatiale SMART-1 sur le chemin de la Lune. Elle était équipée d'un système de propulsion ionique et d'un système de GNC autonome.
Crédit :
ESA
Une fois séparé du lanceur, le satellite va parcourir une série de modes jusqu’à la fin de la mission. Des modes nominaux vont lui permettre de maintenir son attitude, atteindre son poste, déployer ses panneaux solaires et son antenne, le tout afin de se mettre en ordre de marche pour sa mission. Si nécessaire, ces modes d’opération peuvent être interrompus afin de réaliser son maintien à poste, la décharge du moment cinétique des roues à inertie ou répondre à un incident. Différents équipements sont utilisés en fonction de ces modes et certains sont cités en exemple dans la figure 1. On associe aux modes des exigences qui découlent des exigences mission, par exemple :
- Les exigences sur la détermination d'attitude dérivent de plusieurs exigences mission, notamment celle de décrire correctement la position d'une observation dans l'espace, ou peuvent découler d'une allocation d'une exigence de pointage de plus haut niveau (par exemple, afin de pointer un objet avec une certaine précision on a besoin de déterminer l'attitude avec telle précision).
- Parmi les exigences de pointage, on peut citer la définition de la cible et de ce qui doit la pointer (sous-système, instrument etc.). Les exigences peuvent ensuite être classées en 2 catégories : la précision et la stabilité de pointage.
- La précision de pointage est une partie du budget total de pointage de la charge utile, dans lequel se trouvent également des effets mécaniques, thermiques et de mesure.
- La stabilité de pointage découle habituellement des exigences de résolution des instruments. En effet, des mouvements à haute fréquence du satellite ont tendance à dégrader la résolution.
- L'agilité du satellite est souvent nécessaire à une mission pour passer d'un pointage à un autre en un certain temps. Ces exigences ont tendance à contraindre le choix des actionneurs et des méthodes de contrôle.
- La phase dite d'acquisition concerne les satellites équipés de panneaux solaires pour la génération d'énergie. Elle intervient au tout début de la mission, une fois que le satellite est séparé du lanceur, et consiste à stabiliser le satellite et à pointer ses panneaux solaires vers le Soleil avant que ses batteries ne se soient vidées. La connaissance précise du lanceur est essentielle afin de prendre en compte l'ensemble des conditions initiales possibles lors de la conception.
- Des exigences concernent églament la fiabilité et la survie. Il faut déterminer le niveau de fiabilité/redondance nécessaire pour récupérer d'anomalies, ce que le SCAO doit faire en réponse à une anomalie...
Modes SCAO
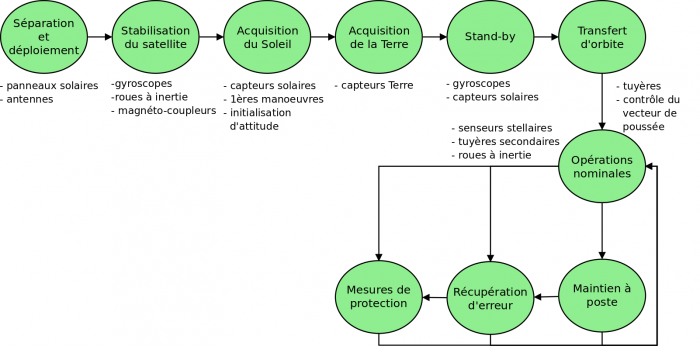
Modes SCAO typiques avec des exemples associés. Après une phase d'initialisation débutée par la séparation et le déploiement et conclue par le transfert d'orbite, le satellite entre dans un mode d'opérations nominales.
Crédit :
Gary Quinsac