| Introduction | Structures planétaires | Observables | Techniques et méthodes | Lieux de vie | Auteurs | Boite à outils |
Contrôleur |
Le contrôleur a pour objectif de convertir l'erreur, c'est-à-dire l'écart entre la mesure de la sortie de la boucle et le signal de référence, en un signal de contrôle qui va finir par ramener l'erreur à 0.
Les performances du contrôleur et a fortiori de l'asservissement sont décrites par plusieurs paramètres :
L'asservissement doit ainsi assurer un compromis entre performance et stabilité. La performance est proportionnelle à la valeur du gain du correcteur, mais à partir d'une certaine valeur celui-ci a tendance à déstabiliser le système.
Le contrôleur "Proportionnel-Intégral-Dérivé" est la logique de contrôle la plus utilisée pour les régulateurs avec boucle de rétroaction. Ce contrôleur agit de trois manières :



La fonction de transfert d'un régulateur PID s'exprime :

Considérons un système de contrôle d'attitude mono-axe simple. L'équation d'Euler s'exprime :
![[I] \ \ddot \theta (t) = u(t) + w(t)](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation30.png)
où ![[I]](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation31.png) est la matrice d'inertie,
est la matrice d'inertie,  est l'angle,
est l'angle,  est le couple de contrôle et
est le couple de contrôle et  est le couple perturbateur extérieur.
est le couple perturbateur extérieur.
Un simple contrôle proportionnel ne pourrait pas atteindre une réponse asymptotiquement stable, nous introduisons donc un régulateur PD (proportionnel-dérivé) :

où  et
et  sont des gains qu'il faut déterminer. Le système en boucle fermée et son équation caractéristique s'écrivent alors :
sont des gains qu'il faut déterminer. Le système en boucle fermée et son équation caractéristique s'écrivent alors :
![[I] \ \ddot \theta (t) + [K_d] \ \dot \theta (t) + [K_p] \ \theta(t) = w(t) \ \leftrightarrow \ I \ p^2 + [K_d] \ p + [K_p] = 0](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation38.png)
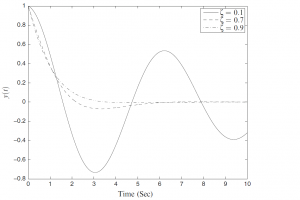
Dans le but d'identifier les valeurs des deux gains, nous introduisons  et
et  , respectivement la fréquence propre (fréquence de la réponse sinusoïdale du système non amorti) et le facteur d'amortissement. L'équation caractéristique est réécrite en introduisant ces deux nouvelles grandeurs :
, respectivement la fréquence propre (fréquence de la réponse sinusoïdale du système non amorti) et le facteur d'amortissement. L'équation caractéristique est réécrite en introduisant ces deux nouvelles grandeurs :

Les gains du contrôleur s'expriment alors : ![[K_p] = [I] \ {\omega_n}^2](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation42.png) et
et ![[K_d] = 2 \ [I] \ \zeta \ \omega_n](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation43.png) . On choisit généralement le facteur d'amortissement de tel sorte que
. On choisit généralement le facteur d'amortissement de tel sorte que  . Il est important de noter que l'information sur la dérivée provient de gyroscopes ou de différences finies de l'attitude.
. Il est important de noter que l'information sur la dérivée provient de gyroscopes ou de différences finies de l'attitude.
Pour une perturbation constante de valeur unitaire, le système asservi par le contrôleur PD produit une attitude en régime permanent non-nulle :  . Idéalement nous souhaitons que l'attitude en régime permanent soit nulle, c'est la raison pour laquelle nous introduisons le contrôleur PID (proportionnel-intégral-dérivé) :
. Idéalement nous souhaitons que l'attitude en régime permanent soit nulle, c'est la raison pour laquelle nous introduisons le contrôleur PID (proportionnel-intégral-dérivé) :

L'équation caractéristique s'écrit cette fois :
![[I] \ p^3 + [K_d] \ p^2 + [K_p] \ p + [K_i] = 0 \ \leftrightarrow \ \left( p^2 + 2 \ \zeta \ \omega_n \ p + {\omega_n}^2 \right) \left( p + \frac{1}{T} \right) = 0](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation47.png)
où  et
et  sont toujours la fréquence propre et le facteur d'amortissement, et
sont toujours la fréquence propre et le facteur d'amortissement, et  est la constante temporelle associée au contrôle intégral. Les gains du contrôleur PID s'expriment :
est la constante temporelle associée au contrôle intégral. Les gains du contrôleur PID s'expriment : ![[K_p] = [I] \left( {\omega_n}^2 + \frac{2 \ \zeta \ \omega_n}{T} \right)](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation51.png) ,
, ![[K_i] = [I] \ \frac{{\omega_n}^2}{T}](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation52.png) et
et ![[K_d] = [I] \left( 2 \ \zeta \ \omega_n + \frac{1}{T}\right)](../pages_nanosats/equations_nanosats-comprendre-techniques-lois-de-controle/equation53.png) . On choisit souvent la constante
. On choisit souvent la constante  telle que :
telle que :  .
.