| Introduction | Structures planétaires | Observables | Techniques et méthodes | Lieux de vie | Auteurs | Boite à outils |
Capteurs inertiels |


Les capteurs inertiels fournissent au satellite une mesure par rapport à une référence fixe dans l'espace. Les gyromètres délivrent l'attitude (vitesse angulaire) et les accéléromètres la position par rapport à cette référence. Pour les premiers, il y a détection du mouvement de rotation absolue, tandis que pour le second c'est le mouvement de translation accéléré qui est détecté. Nous ne nous intéresserons pas ici aux accéléromètres qui ne sont pas utiles à la détermination d'attitude.
Les gyromètres mesurent donc les vitesses angulaires du satellite. On peut en déduire l'attitude de celui-ci en intégrant les vitesses calculées sur un temps donné. Ils sont très intéressants car ils permettent de fournir en permanence les mesures de vitesse de rotation sans se soucier du champ de vue et avec une très bonne précision à court terme. Ils fournissent également des informations à plus haute fréquence que les autres capteurs, ce qui est nécessaire pour certaines boucles de contrôle comme pour le contrôle du vecteur de poussée lors de phases de propulsion. On distingue plusieurs types de gyromètres : les gyromètres mécaniques, les gyromètres optiques et les gyromètres vibrants.
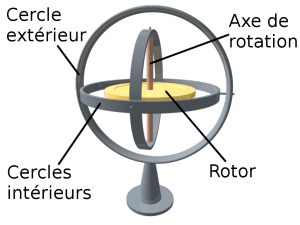
Les gyromètres mécaniques utilisent une toupie gyroscopique. Celle-ci possède une raideur gyroscopique du fait d'une vitesse de rotation élevée permettant de la maintenir selon une direction fixe. Tout couple s'exerçant celui-ci provoque l'écartement de cet axe par rapport à la direction initiale avec une vitesse faible du fait de la rigidité gyroscopique. Le principe consiste à estimer les mouvements du véhicule par rapport à la direction de référence que matérialise l'axe de rotation de la toupie.
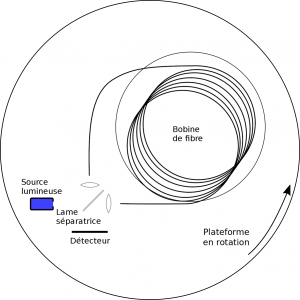
Les gyromètres optiques peuvent être des gyromètres laser ou à fibre optique. Dans les deux cas, ils présentent l'avantage de se dispenser de pièce mécanique en mouvement (pas d'usure), d'avoir de plus grande dynamique de mesure et bande passante, une insensibilité à l'accélération et moins de contraintes concernant la stabilité en température. Les gyromètres laser fonctionnent suivant le principe du laser à cavité résonnante. Les gyromètres à fibre optique reprennent l'effet Sagnac. Deux ondes parcourant un chemin fermé en rotation (par rapport à un référentiel inertiel) subissent un décalage temporel lorsqu'elles ont été émises et reçues par un émetteur/récepteur fixe par rapport au chemin optique. Le décalage temporel entre les deux rayons lumineux est ainsi proportionnel à la vitesse de rotation du système.
Les gyromètres vibrants quant à eux sont assez proches des gyromètres mécaniques, à la différence près qu'aucune pièce n'est ici en mouvement. Ils détectent le déplacement d'une onde vibratoire dans une structure, dû à la force de Coriolis.
Les accéléromètres sont principalement utilisés pour la navigation et le guidage des véhicules de rentrée atmosphérique ou dans l'identification de microvibrations. Une modification de leur tension de sortie est traduite en accélération. Le principe de base consiste à disposer d'une masse dans un boîtier fixée par des ressorts. Lorsque le boîtier est accéléré, la masse a tendance à rester fixe par inertie : elle est donc en mouvement par rapport au boîtier. Les ressorts ont alors pour effet de contrer le déplacement de la masse par rapport au boîtier, et ce déplacement devient alors proportionnel à l'accélération de ce dernier. Les accéléromètres sont capables de mesurer la résultante des forces de surface mais pas les accélérations d'origine gravitationnelle puisque la masse et son boîtier sont soumis au même champ gravitationnel.
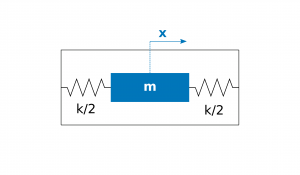
 , avec
, avec  l'accélération,
l'accélération,  la masse,
la masse,  la constante de raideur du ressort et
la constante de raideur du ressort et  le déplacement du ressort.
le déplacement du ressort.