Afin de déterminer la position et l'orientation d'un objet dans l'espace, on fait appel aux systèmes de coordonnées. Dans cette partie, il ne faudra pas confondre les notions de référentiel et système de coordonnées. Un système de coordonnées est notamment défini par son centre (on parle de référentiels géocentrique ou héliocentrique), son plan de référence (équatorial, écliptique) et ses axes. En ce qui concerne les systèmes de coordonnées, on a pour habitude d'utiliser les suivants :
- systèmes de coordonnées rectangulaires (ou cartésiennes), qui à un point de l'espace font correspondre trois distances sur chacun des axes du repère;
- systèmes de coordonnées cylindriques, qui décrivent la position d'un point à l'aide d'une distance au centre, d'un angle et d'une hauteur;
- systèmes de coordonnées sphériques, qui à un point de l'espace associent une distance au centre et deux angles. Ce type de système est couramment utilisé en géographie et en astronomie.
Système de coordonnées inertiel
Un référentiel inertiel (ou galiléen) est un référentiel dans lequel le principe d'inertie est vérifié. Tout corps libre est en mouvement de translation rectiligne uniforme ou au repos. Tout référentiel en mouvement de translation rectiligne et uniforme par rapport à un référentiel inertiel est lui-même inertiel. Les lois de la mécanique sont invariantes par changement de référentiel inertiel. On a l'habitude de distinguer un référentiel considéré comme fixe par rapport à un objet en rotation, comme le repère terrestre, avec un repère dont les axes sont fixés par rapport à une position absolue.
 Termes d'inertie
Termes d'inertie
Dans un référentiel non inertiel, par exemple animé d’un mouvement accéléré par rapport à un référentiel galiléen, il faut faire intervenir les termes d’inertie (comme détaillé par la suite). Ces termes se traduisent par des pseudo-forces, qui se distinguent des forces prises en compte dans un référentiel galiléen car elles ne sont pas associées à une interaction entre le corps dont on étudie le mouvement et un autre corps.
En astronomie, on utilise habituellement les repères cylindriques et sphériques amputés de leur coordonnée de distance. Pour des raisons pratiques, on suppose souvent que les objets observés se situent à des positions fixes à l'intérieur de la sphère céleste, à condition que leur distance soit suffisante.
Un système de coordonnées céleste a pour fonction de déterminer une position dans le ciel. Il existe plusieurs systèmes, utilisant une grille de coordonnées projetée sur la sphère céleste, de manière analogue aux systèmes de coordonnées géographiques utilisés à la surface de la Terre. Les systèmes de coordonnées célestes diffèrent seulement dans le choix du plan de référence, qui divise le ciel en deux hémisphères le long d'un grand cercle (le plan de référence du système de coordonnées géographiques est l'équateur terrestre). Chaque système est nommé d'après son plan de référence.
Système de coordonnées horizontales
Coordonnées horizontales
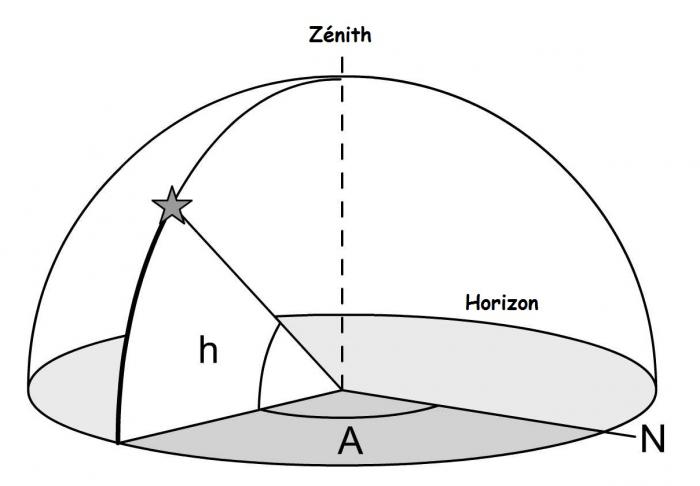
Les coordonnées horizontales locales sont la hauteur (h) et l'azimut (A). La hauteur varie de 0° (horizon) jusqu'à 90° (zénith) et l'azimut est mesuré sur le plan horizontal à partir du Nord (N). Un objet de hauteur négative n'est pas visible depuis le lieu d'observation.
Crédit :
Wikipedia
Le système de cordonnées horizontales, également appelé système local ou système de coordonnées alt-azimutales, est un système de coordonnées célestes utilisé en astronomie par un observateur au sol. Le système, centré sur l'observateur, sépare le ciel en deux hémisphères : l'un situé au-dessus de l'observateur et l'autre situé au-dessous, caché par le sol. Le cercle séparant les deux hémisphères, appelé horizon céleste, situe le plan horizontal. L'altitude (ou élévation, "h") et l'azimut (A), qui constituent les deux principales coordonnées de ce système, sont définis à partir de ce plan.
- L'altitude est l'angle entre l'objet et l'horizon local de l'observateur. Pour les objets visibles, cet angle est compris entre 0° (horizon) et 90° (zénith).
- L'azimut est l'angle de l'objet autour de l'horizon. C'est un cercle divisé en 360° établi sur le plan horizontal depuis le nord vers l'est (des exceptions à cette convention existent).
Ce système de coordonnées présente l'avantage d'être simple et local. Il est facile à établir à un endroit donné à partir du moment où l'observateur sait où se trouve l'un des points cardinaux. C'est la raison pour laquelle il est particulièrement utilisé par les télescopes au sol à monture azimutale, c'est à dire l'essentiel des télescopes les plus récents.
Système de coordonnées équatoriales
Coordonnées équatoriales projetées sur la sphère céleste
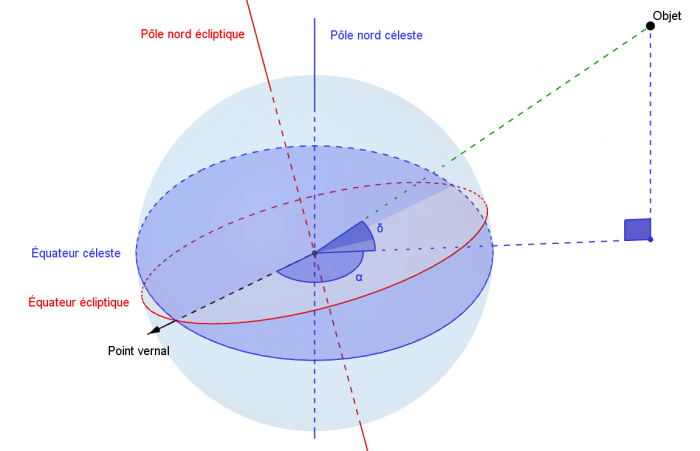
Un système équatorial est projeté sur la sphère céleste. Les longitude (α) et latitude (δ) d'un objet sont indiquées.
Crédit :
Gary Quinsac
Le système de coordonnées équatoriales est un système de coordonnées célestes dont les valeurs sont indépendantes de la position de l'observateur. Ceci est également vrai pour les systèmes de coordoonées écliptiques et galactiques. Ce système utilise comme plan de référence la projection de l'équateur de la Terre sur la sphère céleste. Cette projection s'appelle l'équateur céleste. Elle divise le ciel en deux hémisphères, chacun ayant comme axe de référence la projection d'un pôle terrestre, perpendiculaire à l'équateur céleste. À partir de ces divisions, le système permet d'établir deux coordonnées angulaires : l'ascension droite et la déclinaison.
- L'ascension droite (α) est l'angle mesuré sur l'équateur céleste à partir d'un axe pointant vers un point de référence, le point vernal, correspondant à l'intersection entre l'équateur céleste et l'écliptique. À partir de cet axe, l'angle est mesuré vers l'Est et comporte 24 divisions principales de 15° chacune, nommées « heures ». Chacune des heures se divise en minutes, et en secondes. Cette division de l'angle en heures, minutes et secondes permet de déterminer facilement combien de temps (en temps sidéral) il faudra à un astre pour atteindre un certain point dans le ciel.
- La déclinaison (δ) est l'angle mesuré perpendiculairement entre l'équateur céleste et l'objet céleste observé. Elle se mesure en degrés, positifs pour les objets situés dans l'hémisphère nord et négatifs pour ceux de l'hémisphère sud. La déclinaison varie ainsi de -90° (pôle sud) à +90° (pôle nord) en passant par 0° à l'équateur céleste. L'ascension droite et la déclinaison sont les équivalents astronomiques de la longitude et de la latitude.
Système de coordonnées écliptiques
Coordonnées écliptiques projetées sur la sphère céleste-
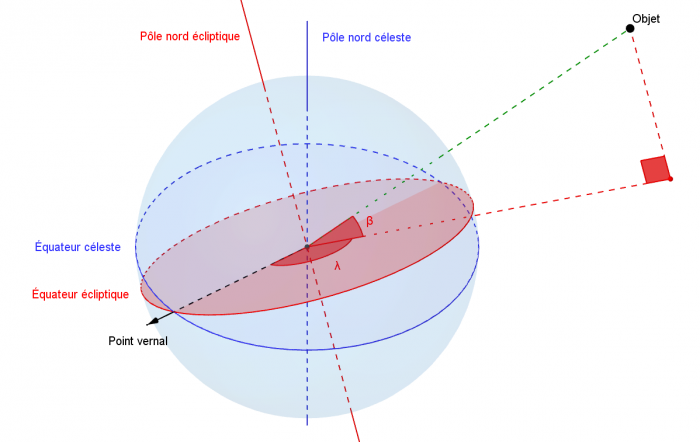
Un système écliptique est projeté sur la sphère céleste. Les longitude (λ) et latitude (β) d'un objet sont indiquées.
Crédit :
Gary Quinsac
Le système de coordonnées écliptiques est un système de coordonnées adapté aux objets célestes : il utilise le plan de l'écliptique (plan de l'orbite de la Terre autour du Soleil) comme plan de référence. Ce plan fait un angle d'approximativement 23° avec le plan équatorial terrestre, du fait de l'inclinaison de l'axe de rotation de la Terre. Ce repère est un système sphérique à deux dimensions.
- La longitude écliptique (λ) est l'angle entre le point vernal (le même que pour le système de coordonnées équatoriales), le centre du repère (le soleil) et la projection de l'objet sur ce plan. Cet angle se mesure en degrés.
- La latitude écliptique (β) représente l'angle entre le plan de l'écliptique, le centre du repère (le soleil) et l'objet.
Ce système peut être centré sur la Terre, le Soleil ou tout autre corps. Il est particulièrement utile pour les objets situés dans le système solaire.
Système de coordonnées galactiques
Coordonnées galactiques projetées sur la sphère céleste
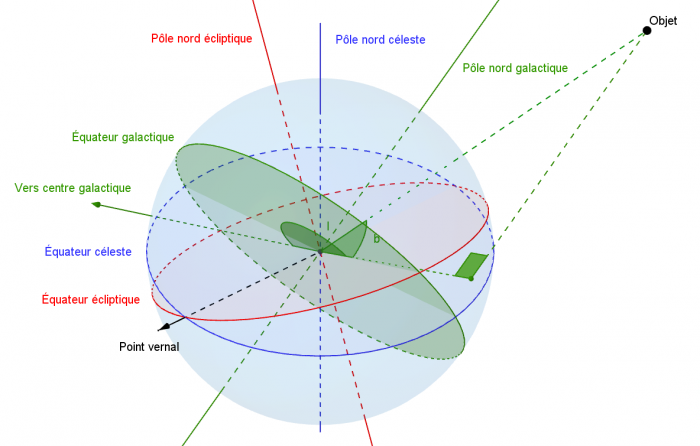
Un système galactique est projeté sur la sphère céleste. Les longitude (l) et latitude (b) d'un objet sont indiquées.
Les coordonnées galactiques sont adaptées aux objets situés dans notre galaxie et non situés dans le voisinage proche du Soleil. Les coordonnées galactiques sont un repérage effectué à l'aide d'une latitude et d'une longitude définies de telle sorte que le plan galactique correspond à l'équateur, et l'origine des longitudes corresponde au centre galactique. Le système de coordonnées galactiques est un système de coordonnées célestes qui prend en compte la rotation de la Galaxie sur elle-même. On parle ici aussi de longitude et de latitude galactiques. Le plan de référence de ce système est le plan de la Galaxie centré sur le centre galactique. Le pôle nord galactique a été défini par convention dans le repère équatorial par une ascension droite de 12 h 51 min 26,282 s et une déclinaison de 27°07′42.01″. Dans ce plan, la direction de référence de la mesure est la direction du centre de la Galaxie.
- La longitude galactique (l) est l'angle entre cette direction de référence et la projection de l'objet sur le plan de la galaxie. La longitude galactique vaut 0° dans la direction du centre de la Galaxie.
- La latitude galactique (b) est la mesure de l'angle entre le plan de référence et l'objet avec le Soleil au centre. Elle mesure en degrés la hauteur de cet objet de 0° dans le plan de référence à 90° au pôle nord galactique.
 Appliquette interactive
Appliquette interactive
Une appliquette interactive est disponible ici. Elle permet d'afficher les trois principaux systèmes de coordonnées célestes en 3D.
Résumé des propriétés des systèmes de coordonnées usuels
| Système de coordonnées | Origine | Plan fondamental | Pôles | Coordonnées | Direction principale |
|---|
| | | | Latitude | Longitude | |
| Horizontal | Observateur | Horizon | Zénith / Nadir | Élévation | Azimuth (A) | Point nord |
| Équatorial | Centre de la Terre (géocentrique) / du Soleil (héliocentrique) | Équateur céleste | Pôles célestes | Déclinaison (δ) | Ascension droite (α) | Point vernal |
| Écliptique | Écliptique | Pôles écliptiques | Latitude écliptique (β) | Longitude écliptique (λ) |
| Galactique | Centre du Soleil | Plan galactique | Pôles galactiques | Latitude galactique (b) | Longitude galactique (l) | Centre galactique |
Dans le cadre de l'analyse de l'attitude et de l'orbite d'un satellite, certains référentiels sont particulièrement utilisés. Les plus importants d'entre eux sont présentés dans cette partie.
Appliquette interactive
Une appliquette interactive est disponible ici. Elle permet de visualiser dans l'espace une partie des repères spatiaux qui vous sont présentés dans cette partie.
Référentiel héliocentrique
Le référentiel de Kepler (ou référentiel héliocentrique) est le référentiel centré sur le centre de masse du Soleil et dont les axes pointent vers des étoiles fixes. Ce référentiel inertiel est utilisé pour les missions interplanétaires. Ces étoiles sont suffisamment lointaines pour qu'elles apparaissent fixes aux échelles de temps considérées.
- Le repère HSEa (pour "heliocentric solar ecliptic inertial") est un exemple de repère héliocentrique. Son axe X pointe vers le point vernal, Z vers le pôle nord écliptique et Y complète le trièdre.
Référentiel géocentrique (ECI)
Le référentiel géocentrique ("Earth Centered Inertial"ou ECI en anglais) est un référentiel dont l'origine est le centre de la Terre et dont les trois axes pointent également vers des étoiles fixes. L'origine du système se situe au centre géométrique de la Terre, l'axe Z est aligné avec le pôle nord, l'axe X pointe vers le point vernal et l'axe Y complète le trièdre. D'autres systèmes de ce type existent, définis par rapport à d'autres directions. La bonne connaissance de la position des étoiles permet de déterminer l'orientation du satellite dans ce référentiel par observation de ces étoiles.
- Parmi ces référentiels, on peut citer J2000 GCI (pour "geocentric inertial"). Son axe Z est aligné avec le pôle nord, l'axe X pointe vers le point vernal au 1er janvier 2000 et l'axe Y complète le trièdre. Ce repère est équatorial.
 Point vernal "vrai"
Point vernal "vrai"
Le point vernal "vrai" se déplace chaque année en raison de la précession des équinoxes (mouvement de l'axe de rotation de la Terre) et du lent déplacement des étoiles. De ce fait on définit un point vernal fixe conventionnel (celui du 1er janvier 2000 pour le repère J2000).
Repère instruments
Un repère instrument est aligné suivant les directions caractéristiques de l'instrument. Ces repères sont définis par rapport au repère satellite ou par rapport à un repère secondaire, lui-même défini par rapport au repère satellite. L'alignement entre les différents référentiels est mesuré sur le sol mais peut évoluer pendant le lancement, mais également à cause du changement de gravité et des distorsions thermiques. Un instrument peut d'ailleurs être positionné sur un bras articulé (cela se rencontre surtout sur les sondes planétaires). La connaissance précise de l'attitude nécessite un étalonnage en vol de ces changements d'alignement et distorsions. Les données et les commandes de la charge utile et des capteurs sont paramétrées par rapport aux systèmes de coordonnées locaux.
 coïncide avec l'axe de rotation de la Terre et les axes
coïncide avec l'axe de rotation de la Terre et les axes  et
et  sont fixés par rapport à la Terre.
sont fixés par rapport à la Terre.
 pointe vers le
pointe vers le  est normal au plan orbital.
est normal au plan orbital.
 est ainsi aligné avec le
est ainsi aligné avec le  pointe le long de l'inverse du moment cinétique orbital. L'axe
pointe le long de l'inverse du moment cinétique orbital. L'axe  vient compléter le trièdre.
vient compléter le trièdre. est parallèle au vecteur vitesse du satellite,
est parallèle au vecteur vitesse du satellite,  est le vecteur normal à la trajectoire à la position du satellite dans le plan de l'orbite et orienté vers le centre de la Terre, et
est le vecteur normal à la trajectoire à la position du satellite dans le plan de l'orbite et orienté vers le centre de la Terre, et  est parallèle et de même sens que le moment cinétique orbital.
est parallèle et de même sens que le moment cinétique orbital. ,
,  et
et  .
.