La cinématique est l'étude du mouvement en fonction du temps indépendammant des causes produisant ce mouvement. Elle est utilisée pour décrire la trajectoire du centre de masse d'un satellite dans l'espace.
Bases de la cinématique
Des cours sur ce sujet existent un peu partout, nous rappellerons simplement quelques notions de base ici :
- Le vecteur position d'un objet dans un repère est le vecteur
 allant de l'origine du repère au centre de l'objet
allant de l'origine du repère au centre de l'objet - Le vitesse de l'objet dans ce repère s'exprime :

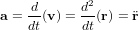
- L'accélération de M dans ce même référentiel est :
- Dans le cas d'un mouvement circulaire, chaque point du corps tourne dans un cercle. La position de tout point peut ainsi être décrite par un angle
 par rapport à sa position originelle
par rapport à sa position originelle - Si
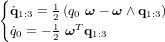
 est un vecteur unitaire dans la direction de l'axe de rotation, la vitesse angulaire est alors obtenue par :
est un vecteur unitaire dans la direction de l'axe de rotation, la vitesse angulaire est alors obtenue par : 
- La vitesse linéaire d'un point du corps en rotation s'exprimer alors :

Dans le cas d'un mouvement circulaire, chaque point du corps tourne dans un cercle.
Cinématique et changement de référentiels
Dans notre domaine, nous sommes constamment contraints de passer d'un repère à un autre pour décrire la trajectoire d'un objet. En cas de référentiels en rotation, tels qu'un référentiel fixé par rapport à la Terre et un référentiel inertiel, passer de l'un à l'autre nécessite d'introduire des termes supplémentaires. Par exemple, si l'on veut décrire la position, la vitesse et l'accélération d'une particule dans un référentiel inertiel noté  à partir de sa position dans un référentiel terrestre (fixé par rapport à la Terre) noté
à partir de sa position dans un référentiel terrestre (fixé par rapport à la Terre) noté  , on peut écrire :
, on peut écrire :
![\bold{r}_I = [T]_{I|F} \ \bold{r}_F](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation10.png)
![\bold{v}_I = \frac{d}{dt} (\bold{r}_I) = [T]_{I|F} \ \frac{d}{dt} (\bold{r}_F) + \frac{d}{dt}([T]_{I|F}) \ \bold{r}_F = [T]_{I|F} \ \frac{d}{dt}(\bold{r}_F) + ([T]_{I|F} \ [\Omega]) \ \bold{r}_F](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation11.png)
Nous avons utilisé la dérivée de la MCD qui est introduite dans le chapitre sur la cinématique d'attitude. Finalement :
![\bold{v}_I = [T]_{I/F} ([\Omega] \ \bold{r}_F + \bold{v}_F)](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation12.png)
![\bold{a}_I = \frac{d}{dt}(\bold{v}_I) = \frac{d}{dt}([T]_{I/F}) ([\Omega] \ \bold{r}_F + \bold{v}_F) + [T]_{I/F} \left[ \frac{d}{dt}([\Omega]) \ \bold{r}_F + [\Omega] \ \frac{d}{dt}(\bold{r}_F) + \frac{d}{dt}(\bold{v}_F)\right]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation13.png)
![\bold{a}_I = [T]_{I/F} \left[ [\Omega] \left([\Omega] \ \bold{r}_F \right) + 2 \ [\Omega] \ \bold{v}_F + \frac{d}{dt}([\Omega] \ \bold{r}_F + \bold{a}_F \right]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation14.png)
Dans le réferentiel en rotation (celui fixé par rapport à la Terre), la deuxième loi de Newton peut alors être écrite :
![\bold{F}_F = [T]_{F/I} \left( m \ \bold{a}_I \right) = m \left[ [\Omega] \left( [\Omega] \ \bold{r}_F \right) + 2 \ [\Omega] \ \bold{v}_F + \frac{d}{dt}([\Omega]) \ \bold{r}_F + \bold{a}_F \right]](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation15.png)
où
![\frac{d}{dt} \left( [\Omega] \right)](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation16.png) est l'accélération angulaire. On introduit ici les accélérations centripète
est l'accélération angulaire. On introduit ici les accélérations centripète ![[\Omega] \left( [\Omega] \ \bold{r}_F \right)](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation17.png) et de Coriolis
et de Coriolis ![2 \ [\Omega] \ \bold{v}_F](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation18.png) .
.
 .
.
 en rotation par rapport à un référentiel
en rotation par rapport à un référentiel  avec une vitesse angulaire
avec une vitesse angulaire  . Si la matrice d'attitude s'exprime
. Si la matrice d'attitude s'exprime ![[T]_{B|A}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation23.png) , alors :
, alors :
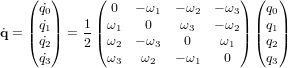
![\frac{d}{dt} \left( [T]_{B|A} \right) = -[\Omega] \ [T]_{B|A}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation24.png) avec
avec ![[\Omega] = \begin{pmatrix} 0 & -\omega_z & \omega_y \\ \omega_z & 0 & -\omega_x \\ -\omega_y & \omega_x & 0 \end{pmatrix}](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation25.png)
 représentant la vitesse angulaire du référentiel
représentant la vitesse angulaire du référentiel  par rapport au référentiel
par rapport au référentiel  , avec
, avec  .
.
![[T(\theta_1)]_1 \leftarrow [T(\theta_2)]_2 \leftarrow [T(\theta_3)]_3](../pages_nanosats/equations_nanosats-comprendre-cinematique-et-dynamique-cinematique-du-satellite/equation30.png) conduisant du référentiel
conduisant du référentiel  au référentiel
au référentiel  l'équation de la cinématique est réécrite :
l'équation de la cinématique est réécrite :

 ).
).