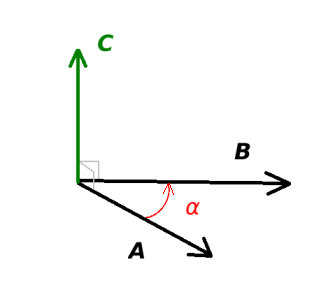
Comme toute équation de la physique, les équations régissant la dynamique atmosphérique doivent s'exprimer dans un système de coordonnées et un référentiel choisis arbitrairement. Un tel système naturellement adapté à une sphère, et donc à une planète, sont les coordonnées sphériques  , où
, où  est la distance au centre de la sphère,
est la distance au centre de la sphère,  est la l'angle de la longitude, et
est la l'angle de la longitude, et  est l'angle de la latitude.
est l'angle de la latitude.
On définit également un repère local pour tout point de l'espace de coordonnées  , avec comme base le triplet
, avec comme base le triplet  où
où  est dirigé vers l'Est,
est dirigé vers l'Est,  dirigé vers le Nord, et
dirigé vers le Nord, et  selon la verticale locale vers le haut. Le référentiel d'étude est ce référentiel local, lié à la rotation de la planète, il s'agit donc d'un référentiel tournant, donc non galiléen.
selon la verticale locale vers le haut. Le référentiel d'étude est ce référentiel local, lié à la rotation de la planète, il s'agit donc d'un référentiel tournant, donc non galiléen.
Système de coordonnées sphériques
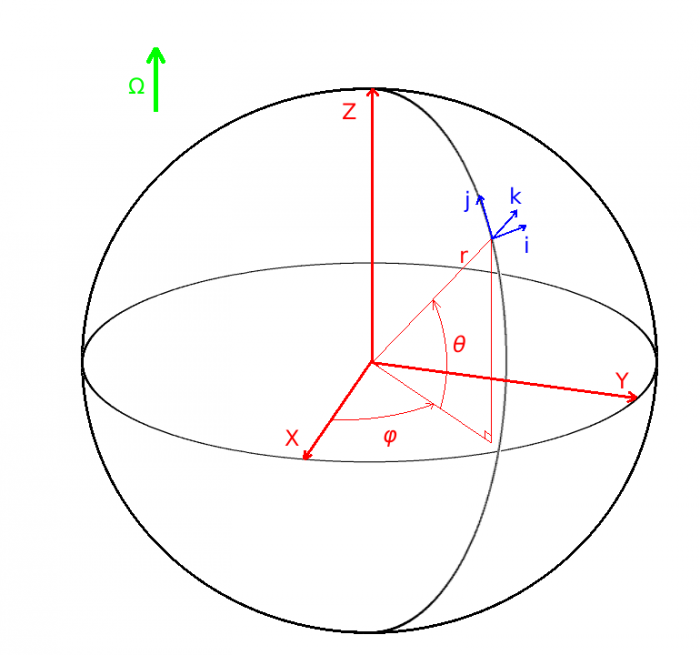
Crédit :
Arianna Piccialli
L'exercice suivant permet de se familiariser avec la manipulation mathématique des coordonnées et des repères. Les resultats serviront à établir l'équation fondamentale de la dynamique.
 Exercice
Exercice
Question 1)
Montrer que dans le référentiel de la planète, un point de coordonnées sphériques  a pour coordonnées cartésiennes
a pour coordonnées cartésiennes 
Question 3)
Montrer qu'une vitesse dans le référentiel local  au point de coordonnées sphériques
au point de coordonnées sphériques  s'exprime par
s'exprime par  .
.
Pour résoudre les équations régissant une atmosphère, on se place dans le référentiel local, lui-même dans un référentiel tournant avec la planète. Ce référentiel n'est pas inertiel, c'est-à-dire qu'il est en accélération par rapport à un référentiel inertiel. Afin de poser le principe fondamental de la dynamique, il est essentiel de tenir de compte de l'accélération apparente du référentiel d'étude, sous la forme de pseudo-forces.
 Précision
Précision
Traditionnellement et pour des raisons pratiques on parle de force, ou pseudo-force, en multipliant l'accélération apparente par la masse de l'objet. On parlera ici plutôt de l'accélération d'une force apparente afin de s'affranchir du terme de masse, qui disparaitra dans les équations finales.
 Force centrifuge
Force centrifuge
La force centrifuge est la force apparente due au fait que le référentiel d'étude est en rotation, donc en accélération. En effet, l'orientation de la vitesse d'un point lié à la planète varie, mais pas son module. Ainsi, une particule au repos dans un référentiel galiléen aura une force apparente dans le référentiel de la planète.
On définit le vecteur rotation  comme étant le vecteur orienté selon l'axe de rotation de la planète et de module
comme étant le vecteur orienté selon l'axe de rotation de la planète et de module  avec
avec  la période de rotation de la planète.
L'accélération de la force centrifuge s'exprime
la période de rotation de la planète.
L'accélération de la force centrifuge s'exprime  avec
avec  le vecteur position depuis l'axe de rotation où la force s'applique.
Dans un système de coordonnées sphériques, on a
le vecteur position depuis l'axe de rotation où la force s'applique.
Dans un système de coordonnées sphériques, on a  , avec
, avec  le vecteur position depuis le centre de la planète.
le vecteur position depuis le centre de la planète.
Une autre manière de l'exprimer est de dire qu'il s'agit d'une accélération perpendiculaire à l'axe de rotation, orientée vers l'extérieur et de valeur 
La force centrifuge est regroupée avec la force de gravité, dont l'accélération vaut  , l'indice
, l'indice  faisant référence à la masse de la planète. On obtient une force dont l'accélération totale est
faisant référence à la masse de la planète. On obtient une force dont l'accélération totale est  . Cette force dérive d'un potentiel, qu'on appelle le géopotentiel, somme de l'action de la gravité et de la force centrifuge.
. Cette force dérive d'un potentiel, qu'on appelle le géopotentiel, somme de l'action de la gravité et de la force centrifuge.
Exercices de démonstration et d'acquisition du cours
Question 1)
Démontrer par l'analyse ou par un schéma en 3D que  correspond bien à une accélération perpendiculaire à l'axe de rotation, orientée vers l'extérieur et de valeur
correspond bien à une accélération perpendiculaire à l'axe de rotation, orientée vers l'extérieur et de valeur  . Comment s'exprime cette accélération dans le référentiel local ?
. Comment s'exprime cette accélération dans le référentiel local ?
Question 2)
Par la suite on fait l'approximation que pour l'accélération due au géopotentiel, on peut se contenter de considérer sa composante uniquement suivant l'axe  pour l'additionner à la pesanteur, ceci afin de simplifier les équations du problème. Afin de s'assurer que cette approximation reste acceptable, quelle est l'erreur maximale faite dans le cas de la Terre si on ne considère pas les autres composantes de l'accélération due au géopotentiel ? Quelle est cette erreur relativement à l'accélération de pesanteur ? Et pour Jupiter ?
pour l'additionner à la pesanteur, ceci afin de simplifier les équations du problème. Afin de s'assurer que cette approximation reste acceptable, quelle est l'erreur maximale faite dans le cas de la Terre si on ne considère pas les autres composantes de l'accélération due au géopotentiel ? Quelle est cette erreur relativement à l'accélération de pesanteur ? Et pour Jupiter ?
Dans un référentiel en rotation, une autre force apparente est à prendre en compte lors d'un déplacement. Il s'agit de la force de Coriolis, qui tient compte du fait que le déplacement d'une particule génère une accélération apparente supplémentaire. Par exemple, le mouvement rectiligne d'une particule est apparement dévié pour un observateur situé dans un référentiel tournant.
L'accélération de la force de Coriolis s'exprime  avec
avec  le vecteur vitesse de la parcelle d'air considérée.
le vecteur vitesse de la parcelle d'air considérée.
La vitesse  d'une parcelle d'air dans l'atmosphère est généralement orientée parallèlement à la surface locale, c'est-à-dire que sa composante radiale (c'est-à-dire sa composante verticale locale) est en générale petit par rapport à au moins une des deux autres. En négligeant la composante radiale, on constate les choses suivantes :
d'une parcelle d'air dans l'atmosphère est généralement orientée parallèlement à la surface locale, c'est-à-dire que sa composante radiale (c'est-à-dire sa composante verticale locale) est en générale petit par rapport à au moins une des deux autres. En négligeant la composante radiale, on constate les choses suivantes :
- A l'équateur l'accélération de Coriolis est orientée selon l'axe radial, c'est-à-dire vers le haut ou vers le bas.
- Dans l'hémisphère Nord, sa projection sur le plan de la surface locale est orientée à droite du vecteur vitesse

- Dans l'hémisphère Sud, sa projection sur le plan de la surface locale est orientée à gauche du vecteur vitesse

Ceci explique pourquoi certaines structures atmosphériques, tels les ouragans ou les anticyclones, tournent toujours dans le sens des aiguilles d'une montre dans l'hémisphère Nord, et dans le sens contraire dans l'autre hémisphère.
Exercice de démonstration et d'acquisition du cours
Question 1)
Démontrer par l'analyse ou par un schéma en 3D les 3 points ci-dessus.
Les écoulements atmosphériques peuvent être décrits en utilisant deux points de vue classiques, appelés eulérien ou lagrangien :
 Description eulérienne
Description eulérienne
L'écoulement est suivi par un observateur depuis une position fixe. C'est le cas, par exemple, d'un atterrisseur sur Mars fixé au sol qui mesure la vitesse du vent, la température, ou la pression. Cette description est souvent préférée car elle est la plus pratique.
Description lagrangienne
Dans ce cas, les particules fluides sont suivies le long de leurs trajectoires. C'est la description la plus intuitive.
 ).
). ).
). , qui est un système de coordonnées cartésiennes.
, qui est un système de coordonnées cartésiennes. ,
,  et
et  dans le repère de la planète en fonction des angles
dans le repère de la planète en fonction des angles  et
et 
 en gardant en tête que
en gardant en tête que  est un vecteur local qui dépend de la position, donc varie avec les coordonnées
est un vecteur local qui dépend de la position, donc varie avec les coordonnées  .
.
 ,
,  et
et  en fonction des angles
en fonction des angles  et
et  .
.
 ,
,  et
et  en fonction de
en fonction de  ,
,  et
et  .
.
 ,
,  ,
,  ,
,  ,
,  et
et  .
.
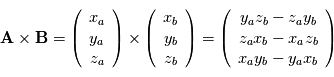
 des vecteurs
des vecteurs  et
et  s'écrit
s'écrit  et correspond au vecteur orthogonal à la fois à
et correspond au vecteur orthogonal à la fois à  et
et  tel que le triplet
tel que le triplet  soit de sens direct. et que le module du produit soit
soit de sens direct. et que le module du produit soit  où
où  est l'angle direct de
est l'angle direct de  vers
vers  . Ainsi, si
. Ainsi, si  et
et  sont colinéaires, leur produit vectoriel sera le vecteur nul.
sont colinéaires, leur produit vectoriel sera le vecteur nul.
 ,
,  et
et  forment une base directe puisque
forment une base directe puisque  est positif. Si
est positif. Si  était négatif, la base serait dans le sens indirect.
était négatif, la base serait dans le sens indirect.
 . Soit
. Soit ![\textbf{A}[\textbf{r}(t)]](../pages_fluide-dynamique/equations_outils/equation166.png) une grandeur physique vectorielle de l'écoulement, dépendant du point d'observation
une grandeur physique vectorielle de l'écoulement, dépendant du point d'observation  et du temps
et du temps  . La variation de la grandeur
. La variation de la grandeur  s'écrit :
s'écrit :

 est la vitesse du fluide avec composants:
est la vitesse du fluide avec composants:  ,
,  ,
,  .
.
![f[\textbf{r}(t)]](../pages_fluide-dynamique/equations_outils/equation175.png) , la relation est la même.
, la relation est la même.
 décrit la variation locale avec le temps en un point d'observation fixé (point de vue eulérien) .
décrit la variation locale avec le temps en un point d'observation fixé (point de vue eulérien) .