L'estimation d'attitude consiste à estimer l'état actuel de l'orientation d'un satellite à partir d'un jeu d'observations et de références obtenues à partir de modèles. Ces observations ont été préalablement effectuées par des capteurs fixés sur le satellite. L'objectif est ici de trouver la meilleure estimation de l'état réel du système sous forme de matrice de changement de repère ou de quaternion d'attitude. La résolution exacte du problème n'est généralement pas possible car les observations sont entachées d'erreurs (erreurs de mesure, d'orientation du capteur, de modélisation...). De plus, on dispose souvent d'une surabondance d'information puisque plusieurs capteurs fournissent des informations par rapport à des références différentes (Soleil, champ magnétique, étoile...). On cherche alors à exploiter de manière optimale ces sources d'information en leur associant des modèles d'erreur.
Les problèmes de détermination d'attitude font intervenir des observations (orientation d'objets) pris à certaines dates. La détermination d'attitude statique représente le cas le plus simple, dans lequel on considère que toutes les mesures sont effectuées au même instant. Au contraire, lorsque le temps est introduit, on parle de détermination d'attitude récursive.
La qualité de la connaissance d'attitude dépend des limitations des capteurs, de la quantification des données, du temps d'échantillonnage et du traitement numérique. La détermination d'attitude embarquée est limitée par les capacités de filtrage de l'ordinateur de bord. Il arrive que pour obtenir une meilleure connaissance de l'attitude a posteriori les données des capteurs soient transmises au segment sol où elles sont post-traitées puis exploitables (par le segment sol ou le satellite).
Boucle SCA
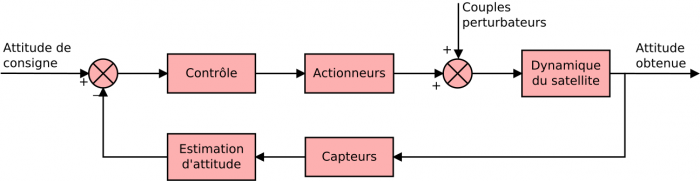
Boucle de contrôle d'attitude.
Crédit :
Gary Quinsac
Le cas particulier de l'estimation d'attitude à partir de mesures simultanées de directions non parallèles est ici introduit. À chaque observation sont associés deux vecteurs. Le premier est un vecteur unitaire  définissant la direction mesurée (observée) de la source (la Terre, le Soleil, une étoile, le champ magnétique terrestre...), exprimée dans le repère lié au satellite. Le second est un vecteur unitaire
définissant la direction mesurée (observée) de la source (la Terre, le Soleil, une étoile, le champ magnétique terrestre...), exprimée dans le repère lié au satellite. Le second est un vecteur unitaire  qui définit la direction de référence de la source, exprimée dans le repère origine (généralement inertiel). L'estimation d'attitude consiste ici à déterminer la matrice de transformation orthogonale
qui définit la direction de référence de la source, exprimée dans le repère origine (généralement inertiel). L'estimation d'attitude consiste ici à déterminer la matrice de transformation orthogonale  satisfaisant pour chaque observation i :
satisfaisant pour chaque observation i :

Méthode TRIAD
La méthode TRIAD se base sur l'observation de deux directions non-parallèles. Il s'agit de déterminer la MCD  permettant de transformer les vecteurs de référence
permettant de transformer les vecteurs de référence  et
et  en vecteurs d'observation
en vecteurs d'observation  et
et  . Puisque l'on cherche à obtenir l'attitude suivant 3 axes, il nous faut créer deux bases orthonormées (y1, y2, y3) et (x1, x2, x3), respectivement associées aux vecteurs d'oservation et de référence. Il ne reste plus qu'à déduire la matrice de transformation orthogonale (ou MCD)
. Puisque l'on cherche à obtenir l'attitude suivant 3 axes, il nous faut créer deux bases orthonormées (y1, y2, y3) et (x1, x2, x3), respectivement associées aux vecteurs d'oservation et de référence. Il ne reste plus qu'à déduire la matrice de transformation orthogonale (ou MCD)  satisfaisant :
satisfaisant :
![\bold y_i = [C] \ \bold x_i](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation11.png) ,
,  ,
, 
Cette méthode présente l'avantage d'être extrêmement simple, d'où son utilisation dans de nombreuses missions passées. De nos jours, cette méthode n'est plus considérée comme suffisamment précise. En effet, les mesures d'observation sont entachées d'erreur, ce qui empêche d'obtenir le même résultat suivant le vecteur d'observation choisi au départ. C'est pour cette raison que l'on choisit généralement l'observation la plus précise. Des techniques de calcul de la covarience de l'erreur de l'estimation ont été développées pour parer à ces inconvénients.
Méthode QUEST
Un critère quadratique peut être utilisé pour déterminer la matrice d'attitude. Cela revient à chercher la matrice orthogonale  minimisant la fonction de moindres carrés :
minimisant la fonction de moindres carrés :
![L = \frac{1}{2} \ \sum_{i=1}^{n}{a_i \left| \bold b_i - [C] \bold r_i \right|^2}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation15.png)
La minimisation de ce critère n'a rien d'évident et de nombreuses méthodes ont été proposées. Il s'agit d'identifier les 9 paramètres de la MCD respectant les différentes contraintes énoncées précédemment (moindres carrés et règles de la MCD). L'algorithme QUEST (QUaternion ESTimation) offre une alternative intéressante. La forme quadratique est alors utilisée à la place de la MCD, permettant de réduire le nombre de paramètres. Nous ne rentrerons pas dans le détail de cette méthode dans le cadre de ce cours.
Dans le cas général où nous ne disposons pas de plusieurs mesures de directions non parallèles effectuées au même instant, le problème d'estimation devient dépendant du temps. Bien que des méthodes récursives basées sur l'algorithme QUEST aient été développées et utilisées, le filtrage de Kalman est le moyen le plus utilisé pour estimer l'attitude d'un satellite en présence de bruits de mesure.
Filtre de Kalman
Le filtre de Kalman a été développé en 1960 comme une nouvelle approche pour le filtrage linéaire et les problèmes de prédiction. Il permet de maintenir une estimation de l'état d'un système dynamique en dehors des périodes d'observation, à partir d'un modèle de son erreur. Puisqu'il s'agit d'un filtre récursif, la quantité d'informations à traiter reste limitée, ce qui en fait un filtre très apprécié à bord des satellites. On a pour habitude de distinguer deux phases dans ce type de filtres, la prédiction et la mise à jour :
- la phase de prédiction intervient lorsqu'aucune observation n'est disponible ; le filtre se base sur le modèle dynamique embarqué pour mettre à jour les paramètres estimés, tout en mettant à jour la matrice de covariance de l'erreur d'estimation ; cette dernière augmente durant cette phase en raison de l'incertitude inhérente au modèle dynamique,
- la mise à jour intervient lorsqu'une observation est disponible ; il devient alors possible de comparer la prédiction à l'observation ; les prédictions sont ainsi mises à jour, en tenant compte des incertitudes liées à l'observation et à la prédiction. Si les incertitudes liées aux observations sont plus faibles que celle du modèle alors cette phase fait décroître la covariance.
 Filtre de Kalman discret
Filtre de Kalman discret
C'est la version la plus simple du filtre de Kalman, seules l'estimation de l'état précédent et les mesures actuelles sont nécessaires.
Phase de prédiction
Durant la phase de prédiction, l'état et l'estimation de la covariance sont projetés dans le temps de l'état k-1 à l'état k :
![[Q]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation29.png) est la matrice de covariance du bruit de processus
est la matrice de covariance du bruit de processus  ,
, ![[P]_{k|k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation31.png) est la matrice d'estimation a priori de la covariance de l'erreur.
est la matrice d'estimation a priori de la covariance de l'erreur.
À chaque étape le processus est répété afin d'obtenir de nouvelles estimations a posteriori à partir des estimations a priori. En pratique, la matrice de covariance ![[R]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation42.png) du bruit de mesure est déterminée avant d'utiliser le filtre et peut être mise à jour par la suite. Il est plus compliqué de déterminer la matrice de covariance du bruit de processus
du bruit de mesure est déterminée avant d'utiliser le filtre et peut être mise à jour par la suite. Il est plus compliqué de déterminer la matrice de covariance du bruit de processus ![[Q]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation43.png) car nous ne pouvons généralement pas directement observer le processus à estimer. Afin d'améliorer les performances du filtre, il est habituel de régler ces deux paramètres.
car nous ne pouvons généralement pas directement observer le processus à estimer. Afin d'améliorer les performances du filtre, il est habituel de régler ces deux paramètres.
La plupart des systèmes physiques, et notamment ceux étudiés, sont non linéaires. Le filtre de Kalman classique n'est donc optimal que sur une faible portion des phénomènes pris en compte. Dans le cas de systèmes non-linéaires, nous utilisons donc un filtre de Kalman étendu, ou "Extended Kalman Filter".
![\bold x_k = [A]_k \ \bold x_{k-1} + [B]_k \ \bold u_{k-1} + \bold w_{k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation16.png)
![\bold z_k = [H]_k \ \bold x_k + \bold v_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation17.png)
 et
et  représentent respectivement les bruits de processus et de mesure. On les suppose indépendants, blancs et de distribution de probabilité normale.
représentent respectivement les bruits de processus et de mesure. On les suppose indépendants, blancs et de distribution de probabilité normale. ![[A]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation20.png) est la matrice qui relie l'état précédent k-1 à l'état actuel k,
est la matrice qui relie l'état précédent k-1 à l'état actuel k, ![[B]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation21.png) est la matrice qui relie l'entrée de commande
est la matrice qui relie l'entrée de commande  à l'état
à l'état  .
. ![[H]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation24.png) est la matrice reliant l'état
est la matrice reliant l'état  à sa mesure
à sa mesure  .
.
![\hat{\bold x}_{k|k-1} = [A]_k \ \hat{\bold x}_{k-1|k-1} + [B]_k \ \bold u_{k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation27.png)
![[P]_{k|k-1} = [A]_k \ [P]_{k-1|k-1} \ {[A]_k}^T + [Q]_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation28.png)
![[K]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation32.png) , puis générer une estimation de l'état a posteriori en incorporant la mesure. Enfin, on obtient la matrice de covariance de l'erreur d'estimation a posteriori
, puis générer une estimation de l'état a posteriori en incorporant la mesure. Enfin, on obtient la matrice de covariance de l'erreur d'estimation a posteriori ![[P]_{k|k}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation33.png) .
.
![[K]_k = [P]_{k|k-1} {[H]_k}^T \ {[S]_k}^{-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation34.png)
![\hat{\bold x}_{k|k} = \hat{\bold x}_{k|k-1} + [K]_k \ \bold y_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation35.png)
![[P]_k = \left( [I] - [K]_k \ [H]_k \right) [P]_{k|k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation36.png)
![[I]](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation37.png) est la matrice identité. Deux équations supplémentaires permettent d'obtenir l'innovation, ou résiduel,
est la matrice identité. Deux équations supplémentaires permettent d'obtenir l'innovation, ou résiduel,  , et la covariance de l'innovation
, et la covariance de l'innovation ![[S]_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation39.png) :
:
![\bold y_k = \bold z_k - [H]_k \ \hat{\bold x}_{k|k-1}](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation40.png)
![[S]_k = [H]_k \ [P]_{k|k-1} \ {[H]_k}^T + [R]_k](../pages_nanosats/equations_nanosats-comprendre-techniques-estimation-d-attitude/equation41.png)