Capteurs
Les capteurs se trouvent en amont de la chaîne du SCAO. Historiquement, les progrès réalisés se sont concentrés sur leur résolution et leur précision, leur masse, leur taille et leur puissance. À partir d'une référence, un capteur déduit son orientation dans l'espace ou sa vitesse de rotation. Le choix d'un capteur dépend de nombreux paramètres techniques, parmi lesquels :
- les sources de référence disponibles :
- les références externes : les étoiles, le Soleil, la Terre, le champ magnétique local,
- la référence inertielle absolue (phénomènes d'inertie par conservation du moment cinétique),
- l'orbite de la mission et les modes de pointage,
- les exigences fonctionnelles et de performances.
Les capteurs se basent sur différents types de mesures permettant ainsi de les classer :
Actionneurs
Les actionneurs sont des dispositifs conçus pour engendrer des forces ou couples capables de produire des mouvements du satellite. Les solutions existantes sont relativement variées et les principales peuvent être classées de la manière suivante :
Les actionneurs peuvent également être séparés en deux catégories. Ceux qui ne servent qu'au contrôle d'attitude, et ceux qui peuvent réaliser à la fois du contrôle d'attitude et du contrôle d'orbite.
Les capteurs optiques fournissent l'orientation dans l'espace du repère du capteur, lui-même lié au repère du satellite, par rapport à des directions de références extérieures, telles que les étoiles, le Soleil et la Terre.
Capteurs stellaires
Un viseur d'étoiles ou capteur d'étoiles est un instrument optique qui repère les coordonnées d'une ou plusieurs étoiles et les compare ensuite aux éphémérides des étoiles enregistrées dans une bibliothèque inclue dans l'instrument. C'est l'instrument optique le plus précis (entre 1 et 10 secondes d'angle pour les plus performants). Il se compose d'un baffle afin d'éviter l'illumination par des éléments parasites tels que le Soleil, d'une partie optique chargée de collecter et focaliser la lumière sur un détecteur (CCD ou APS), d'une électronique de traitement du signal et d'un refroidisseur pour le détecteur. La matrice du détecteur est constituée de pixels qui permettent d'obtenir une image numérisée du champ de vue de l'instrument, chaque pixel étant repéré par ses coordonnées dans le repère lié au viseur stellaire. On détermine finalement la position d'une étoile en calculant le barycentre de l'énergie collectée sur les pixels éclairés. Les viseurs d'étoiles sont utilisés lorsqu'une connaissance fine de l'attitude est nécessaire. Ils ont besoin que la vitesse de rotation du véhicule soit contrôlée en amont afin de ne pas dépasser la vitesse de décrochage, vitesse au dessus de laquelle la lumière d'une étoile se trouve projetée sur de trop nombreux pixels durant la pose et ne permet plus la mesure.
Un capteur d'étoiles possède deux modes d'opération : le mode d'acquisition et le mode de suivi. Dans le premier, la position et la magnitude des objets brillants éclairant la matrice du détecteur sont comparées au catalogue d'étoiles afin de déterminer de façon grossière l'attitude du satellite sans information préalable. Une fois cette estimation de l'attitude intiale effectuée, le second mode permet le suivi sur la matrice des positions des étoiles identifiées. En sortie, un tel capteur est capable de fournir un quaternion d'attitude du repère capteur par rapport à un repère inertiel, tel que le repère J2000, et dans certains cas la vitesse de rotation du satellite.
Viseur d'étoile

Viseur d'étoiles ASTROP APS développé par l'agence spatiale nationale allemande DLT et la compagnie Jena-Optronik en Allemagne. Il est équipé d'une technologie de protection de radiation permettant de longues missions.
Crédit :
ESA, Jena-Optronik
Capteurs solaires
Les capteurs solaires permettent de déduire l'attitude du satellite de la mesure de l'angle d'incidence des rayons solaires sur le capteur. Ils sont classés en deux catégories : les capteurs analogiques et les capteurs digitaux. Dans les grosses missions satellitaires, ils permettent respectivement d'obtenir une précision de 1° à 0,1° et inférieure à 0,05°.
- Les capteurs solaires analogiques sont les plus utilisés pour les CubeSats car ils sont fiables, passifs et peu coûteux. Leur faible précision, généralement de l'ordre de quelques degrés pour cette filière, est avant tout limitée par l'albédo terrestre. Sur de plus gros satellites, ils sont essentiellement utilisés pour les modes d'acquisition/survie. Ils se composent d'une ou plusieurs photo-diodes qui convertissent l'énergie reçue, fonction de l'inclinaison solaire, en courant électrique. Ce courant est proportionnel au cosinus de l'angle entre la normale au capteur et les rayons solaires. Ainsi,
 si
si  et
et  si
si  , avec
, avec  le vecteur unité pointant vers la normale extérieure à la photocellule
le vecteur unité pointant vers la normale extérieure à la photocellule  et
et  le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée.
le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée. - Les capteurs solaires digitaux utilisent l'illumination de quelques pixels d'un capteur numérique CCD ou CMOS. L'ouverture est une fente étroite, et éventuellement la lumière solaire préalablement filtrée pour ne pas abîmer les capteurs trop sensibles. La position du ou des pixels éclairés permet de déterminer l'angle d'incidence du rayon de soleil. Le principe est généralisable à 2 axes. Ils sont généralement embarqués par des satellites n'ayant pas de capteur stellaire.
Capteur solaire digital
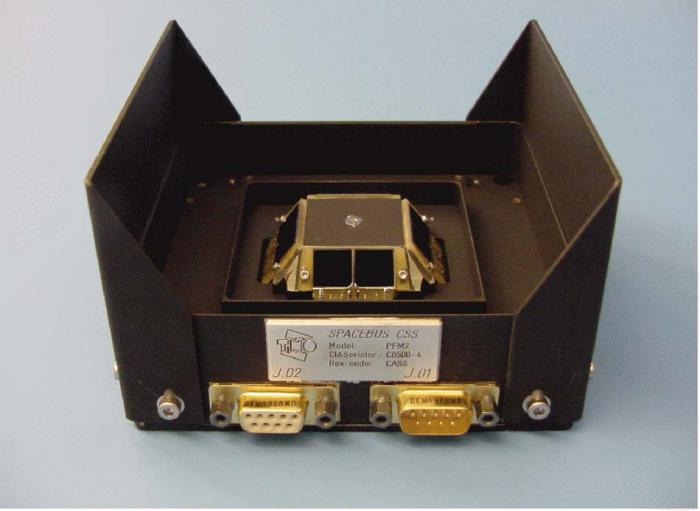
Capteur solaire analogique pyramidal développé par NTO pour la plateforme de satellites de télécommunication Spacebus-4000. Il fournit la position du Soleil selon 2 axes avec une précision meilleure que 0,1°.
Crédit :
ESA, NTO
Capteurs terrestres
Les capteurs terrestres sont utilisés pour déterminer l'orientation du satellite par rapport à la Terre. Plus précisément, c'est l'horizon de la Terre qui est utilisé, car la Terre elle-même peut couvrir jusqu'à 40% de l'espace environnant pour un satellite en orbite passe. Néanmoins, il est difficile de détecter précisément la limite de l'horizon à cause de l'atmosphère terrestre (jusqu'à 70 km), de la décroissance graduelle de l'énergie réémise par la Terre, des variations entre les régions illuminées ou à l'ombre, et enfin de la limite de précision des capteurs. Le principe de détection adopté est donc basé sur une variation thermique de l'élément sensible dans la bande spectrale infra-rouge où la Terre est vue comme un disque uniforme : la bande d'absorption du CO2 entre 14 et 16 μm. Ainsi, l'énergie émise par la Terre est plus homogène et l'horizon, précisément délimité, est visible de jour comme de nuit.
Ces capteurs peuvent être de deux types : les capteurs statiques, qui pointent dans une direction fixe, et les capteurs à balayage. Ils sont principalement utilisés sur des satellites en orbite basse et les satellites de télécommunication en orbite GEO ou MEO. Ils ont jusqu'à présent été assez peu utilisés sur CubeSats.
Magnétomètres
Les magnétomètres convertissent un champ magnétique ambiant en tension électrique. Ils sont principalement constitués de bobines conductrices qui génèrent un courant ou une variation de courant lorsqu'elles sont placées dans un champ magnétique. Ils ne possèdent pas de partie mobile, n'ont pas besoin d'un champ de vue dégagé, consomment peu et sont faiblement encombrants. Ils peuvent néanmoins être contaminés par le champ magnétique local créé par des matériaux ferromagnétiques ou des boucles de courant dans les panneaux solaires. Ainsi, il faut compenser ces champs locaux s'ils sont connus, ou s'en affranchir en se plaçant à bonne distance (au bout d'un mât par exemple) dans le cas contraire. La technologie la plus utilisée, "flux gate", délivre directement la projection du champ magnétique selon l'axe de la bobine, contrairement aux magnétomètres à induction qui fournissent la dérivée temporelle de la projection du champ magnétique. Ces capteurs étant monoaxiaux, on associe généralement trois magnétomètres orientés orthogonalement afin de mesurer le vecteur champ magnétique instantané.
Les magnétomètres sont limités à des environnements possédant un champ magnétique suffisamment fort, et donc à l'orbite terrestre basse du fait de la décroissance en  de son champ magnétique (
de son champ magnétique ( étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les magnétocoupleurs. Ils servent surtout à restituer l'attitude du satellite avec une précision de quelques degrés du fait des erreurs de modélisation du champ magnétique, des erreurs d'orbitographie et de celles propres au capteur. Dans ce cas, seule la connaissance de deux axes est disponible, l'orientation autour du champ magnétique n'étant pas observable. Enfin, on peut utiliser la dérivée du champ magnétique afin d'obtenir une mesure sur 2 axes de la vitesse angulaire du satellite.
étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les magnétocoupleurs. Ils servent surtout à restituer l'attitude du satellite avec une précision de quelques degrés du fait des erreurs de modélisation du champ magnétique, des erreurs d'orbitographie et de celles propres au capteur. Dans ce cas, seule la connaissance de deux axes est disponible, l'orientation autour du champ magnétique n'étant pas observable. Enfin, on peut utiliser la dérivée du champ magnétique afin d'obtenir une mesure sur 2 axes de la vitesse angulaire du satellite.
Magnétomètre monoaxial "fluxgate"
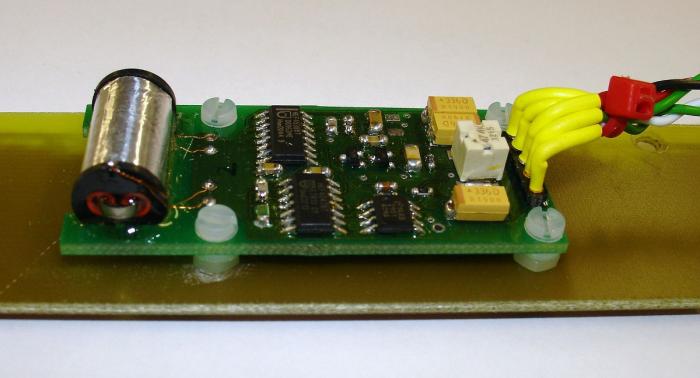
Un magnétomètre "fluxgate" génère son propre champ magnétique. En inversant régulièrement la direction du courant, on inverse le champ magnétique, ce qui permet d'obtenir un champ magnétique moyen nul. Dans le cas où la magnétomètre se trouve dans un champ magnétique ambiant, la moyenne n'est plus nulle et il est alors possible de connaître ce champ extérieur.
Crédit :
Wikipedia
Les capteurs inertiels fournissent au satellite une mesure par rapport à une référence fixe dans l'espace. Les gyromètres délivrent l'attitude (vitesse angulaire) et les accéléromètres la position par rapport à cette référence. Pour les premiers, il y a détection du mouvement de rotation absolue, tandis que pour le second c'est le mouvement de translation accéléré qui est détecté. Nous ne nous intéresserons pas ici aux accéléromètres qui ne sont pas utiles à la détermination d'attitude.
Gyromètres
Les gyromètres mesurent donc les vitesses angulaires du satellite. On peut en déduire l'attitude de celui-ci en intégrant les vitesses calculées sur un temps donné. Ils sont très intéressants car ils permettent de fournir en permanence les mesures de vitesse de rotation sans se soucier du champ de vue et avec une très bonne précision à court terme. Ils fournissent également des informations à plus haute fréquence que les autres capteurs, ce qui est nécessaire pour certaines boucles de contrôle comme pour le contrôle du vecteur de poussée lors de phases de propulsion. On distingue plusieurs types de gyromètres : les gyromètres mécaniques, les gyromètres optiques et les gyromètres vibrants.
Gyromètres mécaniques
Les gyromètres mécaniques utilisent une toupie gyroscopique. Celle-ci possède une raideur gyroscopique du fait d'une vitesse de rotation élevée permettant de la maintenir selon une direction fixe. Tout couple s'exerçant celui-ci provoque l'écartement de cet axe par rapport à la direction initiale avec une vitesse faible du fait de la rigidité gyroscopique. Le principe consiste à estimer les mouvements du véhicule par rapport à la direction de référence que matérialise l'axe de rotation de la toupie.
Gyroscope
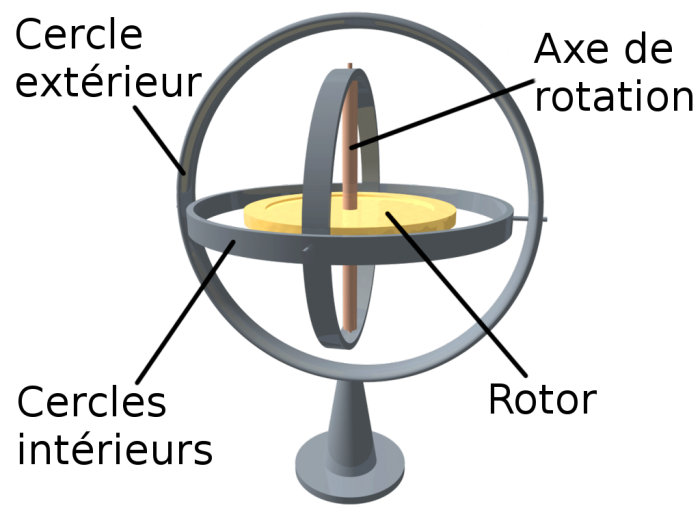
Exemple de gyroscope. Tant que le rotor (plateau central) sera en rotation, il gardera son axe de rotation fixe quelles que soient les orientations des cercles extérieurs.
Crédit :
Gary Quinsac
Gyromètres optiques
Les gyromètres optiques peuvent être des gyromètres laser ou à fibre optique. Dans les deux cas, ils présentent l'avantage de se dispenser de pièce mécanique en mouvement (pas d'usure), d'avoir de plus grande dynamique de mesure et bande passante, une insensibilité à l'accélération et moins de contraintes concernant la stabilité en température. Les gyromètres laser fonctionnent suivant le principe du laser à cavité résonnante. Les gyromètres à fibre optique reprennent l'effet Sagnac. Deux ondes parcourant un chemin fermé en rotation (par rapport à un référentiel inertiel) subissent un décalage temporel lorsqu'elles ont été émises et reçues par un émetteur/récepteur fixe par rapport au chemin optique. Le décalage temporel entre les deux rayons lumineux est ainsi proportionnel à la vitesse de rotation du système.
Gyromètre optique
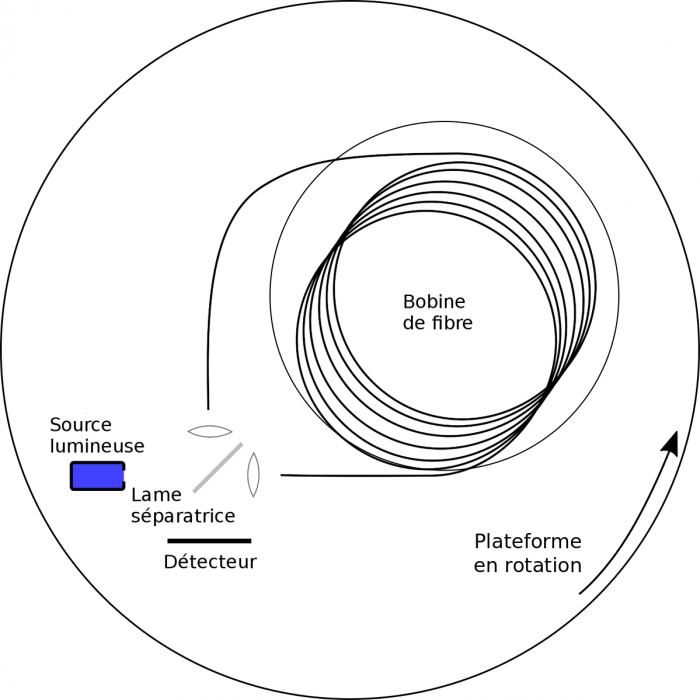
La lumière émise par la source se propage dans la bobine de fibre optique dans deux directions opposées suite à une première traversée de la lame séparatrice (un quart de l'énergie émise initialement arrivera sur le détecteur selon chacune des directions de parcours). Du fait de la rotation de la plateforme, les signaux lumineux parcourant la bobine de fibre dans des directions opposées arriveront au récepteur dans des temps différents. C'est l'effet Sagnac.
Crédit :
Gary Quinsac
Gyromètres vibrants
Les gyromètres vibrants quant à eux sont assez proches des gyromètres mécaniques, à la différence près qu'aucune pièce n'est ici en mouvement. Ils détectent le déplacement d'une onde vibratoire dans une structure, dû à la force de Coriolis.
Accéléromètres
Les accéléromètres sont principalement utilisés pour la navigation et le guidage des véhicules de rentrée atmosphérique ou dans l'identification de microvibrations. Une modification de leur tension de sortie est traduite en accélération. Le principe de base consiste à disposer d'une masse dans un boîtier fixée par des ressorts. Lorsque le boîtier est accéléré, la masse a tendance à rester fixe par inertie : elle est donc en mouvement par rapport au boîtier. Les ressorts ont alors pour effet de contrer le déplacement de la masse par rapport au boîtier, et ce déplacement devient alors proportionnel à l'accélération de ce dernier. Les accéléromètres sont capables de mesurer la résultante des forces de surface mais pas les accélérations d'origine gravitationnelle puisque la masse et son boîtier sont soumis au même champ gravitationnel.
Accéléromètre
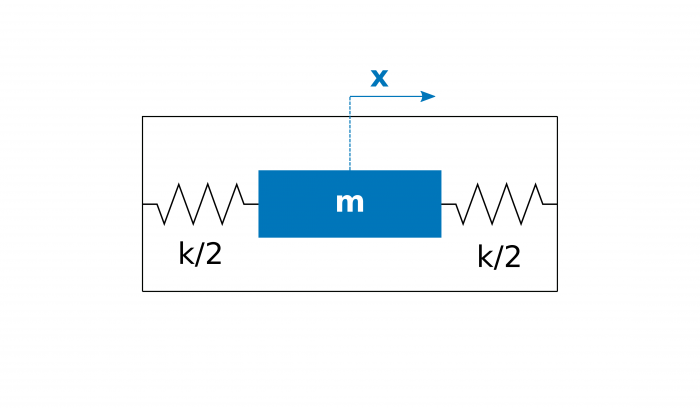
Le déplacement de la masse par rapport à la boîte dans lequelle elle se trouve dépend de l'accélération de la boîte.

, avec

l'accélération,

la masse,

la constante de raideur du ressort et

le déplacement du ressort.
Crédit :
Gary Quinsac
Parmi les actionneurs inertiels, on distingue les roues d'inertie et les actionneurs gyroscopiques.
Roues à inertie
Les roues à inertie sont les actionneurs les plus utilisés pour le contrôle d'attitude des satellites. Elles permettent le stockage et la restitution du moment cinétique. Elles sont composées d'une masse en rotation autour d'un axe fixe ou volant d'inertie. Le couple créé par une roue à inertie est égal au changement du moment cinétique durant un temps donné (voir la page sur la dynamique d'attitude). Un couple est ainsi créé lorsque le moment cinétique de la roue à inertie est modifié, c'est-à-dire que sa vitesse de rotation change. Cette accélération ou décélération angulaire permet d'emmagasiner ou de libérer du moment cinétique. Ce type d'actionneur peut saturer, c'est-à-dire atteindre une limite supérieure ou inférieure en vitesse angulaire. Dans ce cas il lui devient impossible de fournir un couple selon cet axe (toute évolution possible est une décélération de la roue entraînant un couple dans le sens contraire à celui souhaité). Il faut alors utiliser un autre actionneur à bord pour ramener la vitesse dans une plage admissible tant pour le fonctionnement propre de la roue que pour les performances du contrôle d'attitude. Ces actions de réduction de la vitesse absolue du volant d'inertie, appelées "désaturation", se font lors de l'application d'un couple antagoniste, généralement à l'aide de magnéto-coupleurs ou de propulseurs.
Roues à inertie
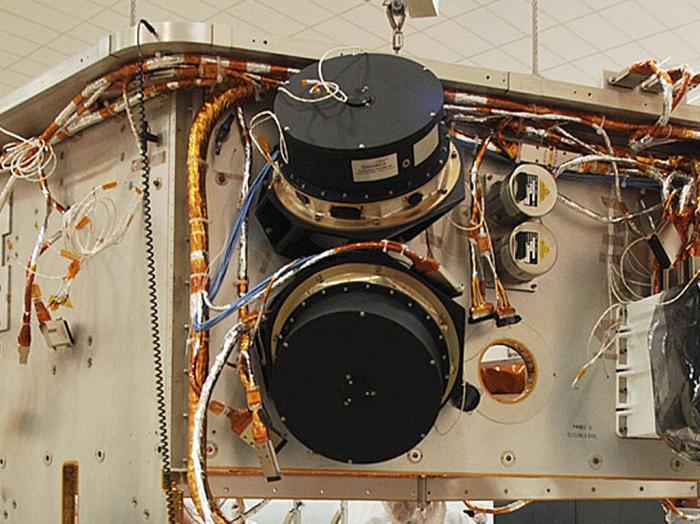
Deux des quatre roues à inertie du télescope Kepler durant l'assemblage. Elles sont inclinées différemment afin de permettre un contrôle de l'attitude selon plusieurs axes. L'une de ces roues a été victime d'un problème que l'on rencontre parfois avec ce type d'actuateurs, c'est à dire une friction trop importante. Pour parer à la perte d'une roue à inertie, on se permet généralement des configurations redondantes sur les gros satellites.
Crédit :
Ball Aerospace photo
Actionneurs gyroscopiques
Les roues à inertie sont limitées en termes de capacité de couple. C'est la raison pour laquelle les satellites nécessitant de rapides manœuvres ou possédant des fortes inerties (comme les stations orbitales) utilisent plutôt des actionneurs gyroscopiques, ou gyrocoupleurs. Contrairement aux roues à inertie, le principe n'est plus de produire un couple en faisant varier la vitesse de rotation de la roue, mais en modifiant l'axe de rotation d'une roue tournant à une vitesse constante. Une variation du moment cinétique est ainsi créée, se traduisant par un couple perpendiculaire au moment cinétique de la roue et au vecteur vitesse de rotation qui lui est appliqué (suivant le principe du couple gyroscopique). Les actionneurs gyroscopiques consomment moins d'énergie et possèdent une plus grande capacité de couple pour des masses et des tailles comparables. Néanmoins, leur utilisation est limitée par l'importance des couples appliqués aux articulations (risques de panne mécanique) et aux précisions requises dans les mesures de position et de vitesse angulaire.
Actionneur gyroscopique
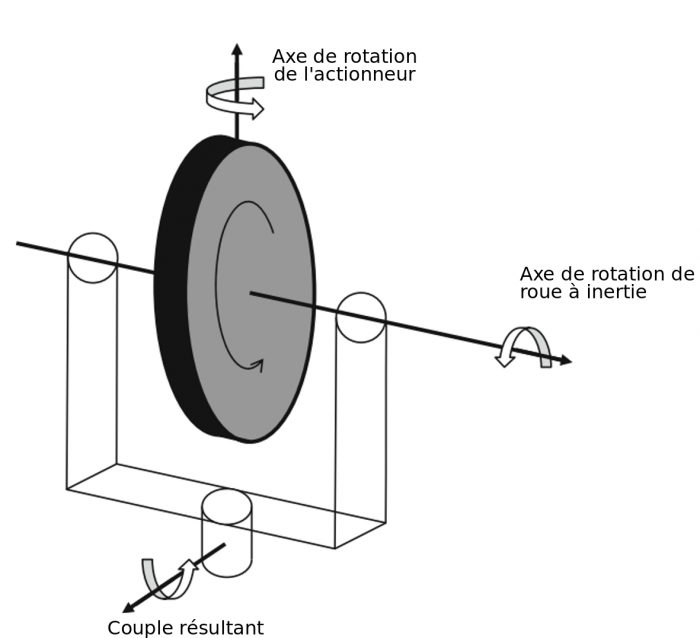
Fonctionnement d'un actionneur gyroscopique.
Crédit :
Gary Quinsac
Magnéto-coupleurs
Un magnéto-coupleur est une bobine qui, parcourue par un courant, génère un moment dipolaire  (en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre
(en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre  , le magnéto-coupleur fournit alors un couple
, le magnéto-coupleur fournit alors un couple  . On distingue trois types de magnéto-coupleurs :
. On distingue trois types de magnéto-coupleurs :
- Le moment dipolaire des magnéto-coupleurs les plus simples s'exprime en fonction de nombre de spires
 , de l'aire de la section de la bobine
, de l'aire de la section de la bobine  et du courant d'intensité
et du courant d'intensité  la parcourant. Ce moment dipolaire s'exprime alors
la parcourant. Ce moment dipolaire s'exprime alors  et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale.
et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale. - On utilise également des "torque rods", c'est-à-dire une bobine entourant cette fois un barreau ferromagnétique, afin d'obtenir de plus importants moments dipolaires pour un courant donné.
- Enfin, on réalise également des magnéto-coupleurs "embarqués", c'est-à-dire qu'ils sont directement obtenus sur le PCB où la bobine vient prendre la place des traves de cuivre de la plaque. La bobine prend alors la forme d'une spirale carrée.
La principale limitation de cet actionneur est que le couple généré est toujours orthogonal au champ magnétique, limitant à seulement deux angles d'attitude le contrôle du satellite en un point donné de son orbite. À l'instar des magnétomètres, leur utilisation est limitée aux orbites terrestres basses. Ils peuvent être utilisés soit pour effectuer du contrôle d'attitude soit pour "désaturer" des actionneurs inertiels. La plupart des applications des magnéto-coupleurs utilisent trois appareils produisant des couples sur trois axes orthogonaux. Il n'est pas toujours nécessaire d'employer plus de magnéto-coupleurs pour la redondance puisqu'ils ont habituellement un "double enroulement" fournissant une redondance interne.
Magnéto-coupleurs
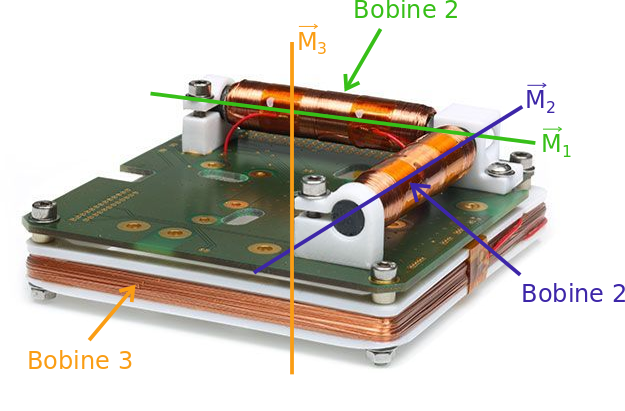
"SatBus MTQ" est un système composé de trois magnéto-coupleurs orthogonaux respectant le standard CubeSat. Les bobines 1 et 2 bénéficient d'un barreau ferromagnétique, contrairement à la bobine 3.
Crédit :
Nano Avionics
Spécificités de la propulsion
Parmi les fonctions couvertes par le SCAO il y a la réalisation des manœuvres de modification de la vitesse ainsi que le contrôle d'attitude associé (assurer le pointage des propulseurs lors de la poussée). Le ΔV nécessaire au contrôle d'orbite ne peut être fourni que par des propulseurs, néanmoins ceux-ci peuvent également être utilisés pour générer des couples. Contrairement aux magnéto-coupleurs, ce sont des actionneurs utilisables sur n'importe quelle orbite car ils n'ont pas besoin d'un environnement particulier pour fonctionner. Leur principal inconvénient est une durée de vie limitée inhérente à l'utilisation d'un carburant, lui-même en quantité finie.
Fonctions de la propulsion satellitaire
Il faut différencier la propulsion des lanceurs de celle des satellites. La première doit permettre des incréments de vitesse de l'ordre de 7 à 100 km/s et de très importants niveaux de poussée. Elle se caractérise par une faible capacité d'emport et se présente sous la forme de puissants propulseurs chimiques. La seconde, qui nous intéresse ici, sert à effectuer des transferts orbitaux et des voyages interplanétaires, du contrôle d'orbite et du contrôle d'attitude. Le sous-système propulsif d'un satellite remplit ainsi certaines fonctions :
- le transfert du véhicule de l'orbite d'injection lanceur à son orbite définitive,
- le maintien à poste (contrôle d'orbite),
- le contrôle d'attitude,
- la désorbitation du véhicule en fin de vie opérationnelle,
- le transfert interplanétaire et la mise en orbite autour d'un corps (planète, astéroïde, comète...) dans le cas d'une sonde interplanétaire.
Orientation du vecteur de poussée
Pour cela, il doit délivrer des forces et des couples. Les forces, ou poussées, sont obtenues par l'éjection de matière à grande vitesse et varient entre quelques μnewtons et quelques centaines de newtons. Suivant les axes de poussée, deux cas de figure sont possibles :
- si l'axe de poussée est parfaitement aligné avec le centre de masse alors on modifie uniquement la vitesse du véhicule,
- si l'axe de poussée n'est pas aligné avec le centre de masse, il y a à la fois une modification de la vitesse du véhicule (égale au cas où la force serait apliquée au centre de masse) et de sa vitesse de rotation (apparition d'un couple proportionnel à l'écart entre l'axe et le centre de masse).
Moteur principal de la navette américaine
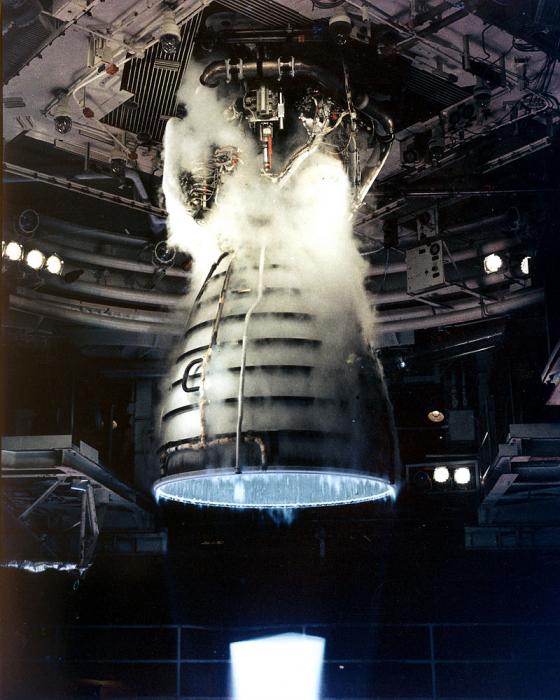
Test d'allumage du moteur principal de la navette spatiale.
Crédit :
NASA
Système de propulsion de BepiColombo
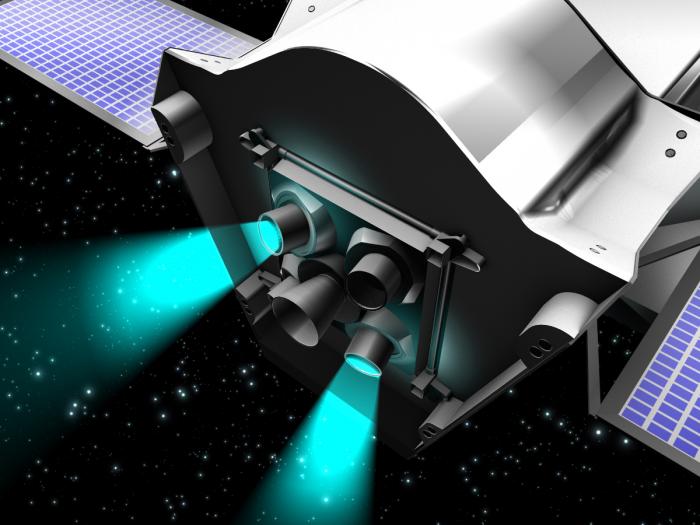
Vue d'artiste du système de propulsion ionique qui sera utilisé pour la mission BepiColombo. Cette mission d'exploration de la planète Mercure doit être lancée en octobre 2018 et est développée conjointement par l'ESA et la JAXA.
Crédit :
ESA
Incrément de vitesse
Ecrivons que la variation de la quantité de mouvement du satellite est opposée à la variation de la quantité de mouvement du carburant expulsé : 
On peut directement en déduire la capacité d'incrément de vitesse total ( ) du satellite :
) du satellite : 
On en déduit l'équation de Tsiolkovski : 
 Manœuvres orbitales
Manœuvres orbitales
Voici quelques exemples d'incréments de vitesse associés à des lancements et à des manœuvres orbitales issus de "Spacecraft propulsion - A brief introduction" par Peter Erichsen :
Incréments de vitesses associés à des manœuvres spatiales et de décollage
| Manœuvre | ΔV typique [m/s] |
|---|
| Kourou → LEO (équatorial) | 9300 |
| Kourou → GTO | 11443 |
| Cap Canaveral → LEO (équatorial) | 9500 |
| Cap Canaveral → GEO | 13600 |
| LEO → GEO (changement d'inclinaison de 28°) | 4260 |
| GTO → GEO (changement d'inclinaison de 9°) | 1500 |
| GTO → GEO (changement d'inclinaison de 28°) | 1800 |
| Maintien à poste Nord/Sud | 50 / an |
| Maintien à poste Est/Ouest | 5 / an |
| LEO → Orbite de libération terrestre | 3200 |
| LEO → Orbite lunaire | 3900 |
| LEO → Orbite martienne | 5700 |
Quantité de carburant
Si l'on veut déterminer la quantité de carburant nécessaire à la réalisation d'un manœuvre spatiale  , il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir :
, il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir : 
Impulsions
Nous pouvons maintenant définir de nouveaux termes. L'impulsion minimum (ou "impulse bit" en anglais, Ibit) est la plus petite modification de la quantité de mouvement permise par le système de propulsion. C'est un paramètre important lorsque l'on veut effectuer du contrôle fin de l'attitude et de l'orbite.
L'impulsion totale (Itot) quant à elle représente la capacité de modification de la quantité de mouvement pour une quantité donnée de carburant : ![I_{tot} = \int_{0}^{\tau}{F \ dt} = v_e \ \int_{0}^{m_p}{dm} = v_e \ m_p \ \textup{[N.s]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation10.png) .
.
Il est essentiel de définir des paramètres permettant de comparer la performance des différents systèmes propulsifs. Le plus utilisé, l'impulsion spécifique (Isp), peut être obtenue expérimentalement. Elle se définit comme l'impulsion délivrée par unité de poids de carburant :  , avec
, avec  le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
Dans le but de déterminer la performance du système propulsif dans son ensemble, en incluant la masse de l'ensemble (l'électronique, le carburant et réservoir, l'alimentation) mps, on introduit l'impulsion spécifique du système, notée Issp : ![I_{ssp} = \frac{I_{tot}}{m_{ps} \ g_0} \ \textup{[s]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation13.png) .
.
Action-réaction
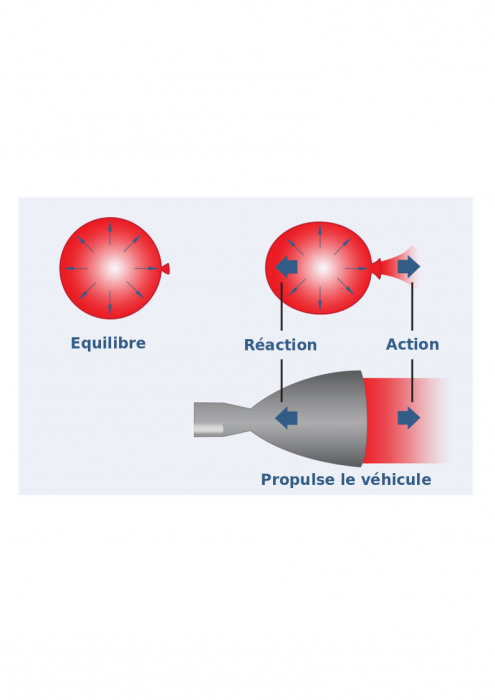
Illustration du principe d'action-réaction. Le carburant éjecté propulse le véhicule dans la direction opposée.
Le sous-système de propulsion est en interaction proche avec les sous-systèmes mécanique et thermique, notamment pour l'implantation des réservoirs et le contrôle thermique de la propulsion. Il doit également respecter les exigences du contrôle d'attitude et d'orbite (SCAO). Si son principe de fonctionnement est basique (une énergie emmagasinée est libérée afin de transmettre une énergie cinétique à un véhicule) il existe différents types de propulsion, eux-mêmes divisés en sous-groupes :
- la propulsion chimique dans laquelle un gaz à haute est libéré avec une importante quantité de mouvement,
- la propulsion électrique qui utilise une énergie électrique ou électromagnétique afin d'augmenter la quantité de mouvement du carburant expulsé,
- la propulsion "sans-carburant" qui, comme son nom l'indique, ne nécessite pas de carburant. Elle ne sera pas détaillée dans ce cours (ex : voile solaire).
Dans le but de répondre aux exigences du SCAO, les systèmes de propulsion sont en particulier caractérisés par :
- une faible poussée avec de faibles niveaux d'accélération,
- des modes d'opération continus pour le contrôle d'orbite,
- des modes d'opération pulsés pour le contrôle d'attitude,
- des performances prédictibles, précises et répétables,
- leur stockage (fiabilité...),
- l'impact des particules émises.
Certains de ces critères sont repris dans le tableau suivant pour les différents types de propulsion introduits dans ce cours.
Comparaison des différents types de propulsion
| Type de propulsion | Fiabilité | Coût | Isp | Poussée | Puissance électrique |
|---|
| Gaz froids | Gaz | Très bonne | Très bas | Très basse | Faible | Très faible |
| Liquide | Bonne | Très bas | Très basse | Faible | Très faible |
| Gaz chauds | Solide | Bonne | Bas | Moyenne | Très forte | Très faible |
| Mono-carburant | Bonne | Bas | Basse | Faible | Très faible |
| Bi-carburant | Moyenne | | Haute | Moyenne | Très faible |
| Électrique | Électrothermique | Moyenne | | Haute | Très faible | Forte |
| Électromagnétique | Faible | | Très haute | Extrêmement faible | Forte |
| Électrostatique | Faible | | Extrêmement haute | Très faible | Très forte |
Une comparaison de la force de poussée et de l'impulsion spécifique de systèmes de propulsion adaptés aux nano.micro-satellites est proposée dans cette figure.
Classification des sous-systèmes de propulsion
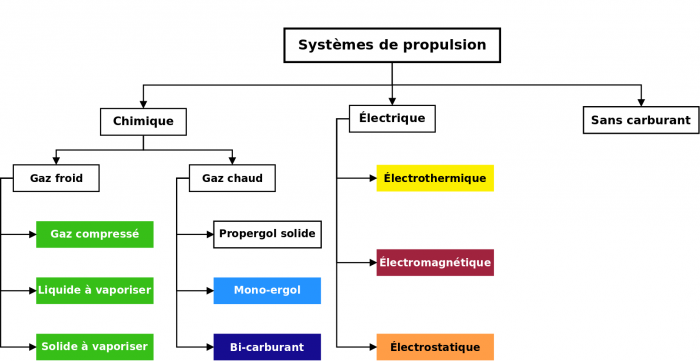
Les principaux systèmes de propulsion sont ici classés par catégorie. Les couleurs indiquées sur cette figure correspondent au couleurs présentes dans la figure suivante.
Crédit :
Gary Quinsac
Performances de systèmes de propulsion pour CubeSat
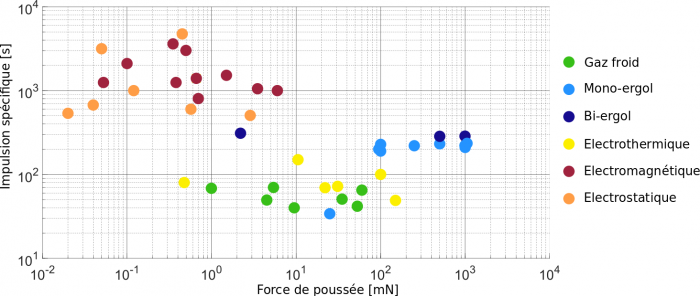
Impulsion spécifique et force de poussée de systèmes de propulsion pour CubeSat (en développement pour la plupart en 2018). Des couleurs permettent de différencier les différents types de propulsion.
Crédit :
Gary Quinsac
La propulsion chimique utilise des gaz à haute température et/ou pression, accélérés à travers une tuyère. Les systèmes de propulsion chimique sont généralement associés à des impulsions spécifiques plus faibles que les propulsions électriques, mais de plus grandes poussées. On peut les diviser en deux catégories : les systèmes à gaz froid et à gaz chaud.
Systèmes de propulsion à gaz froid
Ces systèmes utilisent des gaz stockés sous haute pression ou sous forme liquide. Les gaz sont détendus dans une tuyère convergente-divergente pour obtenir la force de poussée. Ce sont les systèmes les plus simples à mettre en œuvre, mais cela s'accompagne d'une faible force de poussée et d'un faible rendement (impulsion spécifique). Ils présentent une bonne aptitude au fonctionnement en mode pulsé, du fait du faible temps de réponse, les rendant attrayant pour assurer le contrôle d'attitude. Ils ont également l'avantage de limiter les contaminations de l'environnement, ce qui est intéressant notamment pour les optiques des missions scientifiques.
La simplicité de ces systèmes les rend intéressants pour les CubeSats. Néanmoins, du fait de la nécessité de pressuriser le carburant, ils ne respectent pas le cahier des charges décrit par le CDS ("CubeSat Design Specification").
Systèmes de propulsion à gaz chauds
Pour les missions requérant des niveaux de poussée et d'impulsion supérieurs, les gaz froids ne sont plus adaptés et il est nécessaire d'utiliser des carburants plus énergétiques générant des gaz chauds. Les systèmes à gaz chaud sont le type le plus commun de propulsion spatiale. Les ergols des systèmes à gaz chaud sont stockés à l'état liquide ou solide. Une réaction de combustion exothermique de l'ergol est nécessaire pour obtenir des produits à haute température qui sont ensuite expulsés dans la tuyère. Ils nécessitent donc généralement une étape de plus que les gaz froids. On les classe en deux catégories en fonction de leur ergol :
- liquide, comprenant mono-ergol et bi-liquide,
- solide, mais cela concerne les fusées et non les satellites car ils ne sont pas rallumables.
Mono-ergols
Le mono-ergol le plus utilisé est l'hydrazine. Il se décompose dans le propulseur par catalyse. Les gaz chauds résultant sont explulsés par la tuyère. Il présente l'avantage d'être fiable tout en conservant de bonnes performances, mais sa haute toxicité a poussé les chercheurs à s'orienter vers des aternatives appelée "mono-ergols verts". Ces ergols sont des sels dérivés de l'acide nitrique, tels que le dinitramide d'amonium.
Bi-liquides
Dans les systèmes à bi-liquides, deux ergols, un comburant et un carburant, produisent une force de poussée par combustion. Ils sont introduits séparément dans la chambre de combustion où ils s'inflamment spontanément par contact et génèrent des gaz chauds, une nouvelle fois détendus dans la tuyère. Ces systèmes sont plus complexes et plus chers que les systèmes présentés précédemment, mais ils sont également plus efficaces (meilleure Isp) et plus puissants (meilleure poussée).
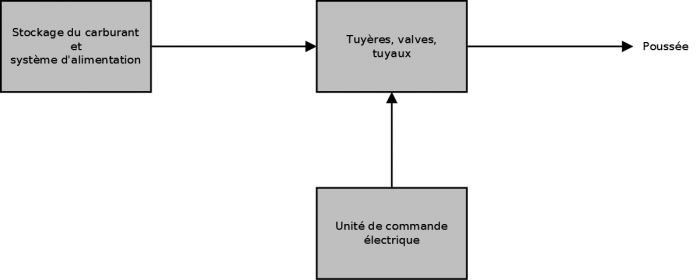
Schéma des systèmes de propulsion chimiques
Crédit :
Gary Quinsac
La propulsion électrique contourne la limitation fondamentale de la propulsion chimique, c'est-à-dire que l'énergie du carburant expulsé ne dépend que de son énergie chimique et du débit. Une énergie électrique ou électromagnétique est utilisée afin d'éjecter de la matière à des vitesses beaucoup plus élevées. En d'autres termes, on utilise la puissance électrique issue du sous-système électrique (panneaux solaires, batteries...) pour accélérer le carburant et produire une force de poussée. Ces vitesses d'éjection plus importantes se traduisent immédiatement par une plus grande efficacité (moins de carburant est nécessaire pour obtenir un même incrément de vitesse). Néanmoins, les forces de poussée produites sont nettement plus faibles que dans le cas de la propulsion chimique. Par conséquent, la propulsion électrique est préférée lorsque le ΔV à réaliser est important ou lorsque il est nécessaire des manœuvres avec des poussées très faibles (contrôle d'attitude très précis, etc.).
La propulsion électrique offre une grande gamme de performances en fonction du type de sous-système utilisé. On les classe ainsi en trois catégories : les systèmes électrothermaux, électromagnétiques et électrostatiques.
Systèmes de propulsion électrothermaux
Historiquement, ces systèmes sont une amélioration par rapport aux systèmes de propulsion chimiques. Le gaz est chauffé en passant le long d'une surface chauffée électriquement ou à travers un arc électrique afin de lui conférer plus d'énergie. Le gaz ainsi chauffé bénéficie d'une détente plus efficace.
Systèmes de propulsion électromagnétiques
La propulsion électromagnétique utilise la conversion d'un gaz en plasma. Le plasma est constitué d'électrons (de charge électrique négative), d'ions (pour la plupart de charge électrique positive) et d'atomes ou molécules neutres (non chargés électriquement). Les ions positifs résultants sont alors accélérés à de très grandes vitesses par l'énergie électrique grâce à la force de Laplace  , où
, où  et
et  sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
Contrairement aux systèmes électrostatiques qui vont être présentés par la suite, les systèmes électromagnétiques expulsent un plasma globalement neutre, ce qui est intéressant pour éviter de charger électriquement le reste du satellite. Cette famille de propulseurs contient notamment les PPT (Pulsed Plasma Thrusters), les VAT (Vacuum Arc Thrusters) ou encore les MPDT (Magneto Plasma Dynamic Thrusters).
Systèmes de propulsion électrostatiques
À la manière de l'accélération électromagnétique, l'énergie électrique est dans un premier temps utilisée pour transformer le fluide propulsif en plasma. La différence se situe au niveau de l'accélération des ions qui n'est plus obtenue par les forces de Laplace mais par l'application d'un champ électrostatique  créant une force de Coulomb (
créant une force de Coulomb ( ). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
Parmi les propulseurs électrostatiques, on peut citer les propulseurs ioniques, les propulseurs à effet Hall et propulseurs FEEP (Field Emission Electric Propulsion).
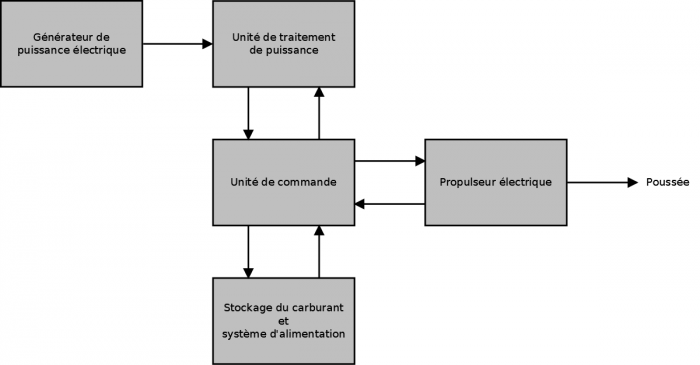
Schéma des systèmes de propulsion électriques
Crédit :
Gary Quinsac
 qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée
qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée  , ce qui, par conservation de la quantité de mouvement, résulte en une
, ce qui, par conservation de la quantité de mouvement, résulte en une ![\bold F = \dot m \bold v_e \ \textup{[N]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation3.png) .
.