Les capteurs optiques fournissent l'orientation dans l'espace du repère du capteur, lui-même lié au repère du satellite, par rapport à des directions de références extérieures, telles que les étoiles, le Soleil et la Terre.
Capteurs stellaires
Un viseur d'étoiles ou capteur d'étoiles est un instrument optique qui repère les coordonnées d'une ou plusieurs étoiles et les compare ensuite aux éphémérides des étoiles enregistrées dans une bibliothèque inclue dans l'instrument. C'est l'instrument optique le plus précis (entre 1 et 10 secondes d'angle pour les plus performants). Il se compose d'un baffle afin d'éviter l'illumination par des éléments parasites tels que le Soleil, d'une partie optique chargée de collecter et focaliser la lumière sur un détecteur (CCD ou APS), d'une électronique de traitement du signal et d'un refroidisseur pour le détecteur. La matrice du détecteur est constituée de pixels qui permettent d'obtenir une image numérisée du champ de vue de l'instrument, chaque pixel étant repéré par ses coordonnées dans le repère lié au viseur stellaire. On détermine finalement la position d'une étoile en calculant le barycentre de l'énergie collectée sur les pixels éclairés. Les viseurs d'étoiles sont utilisés lorsqu'une connaissance fine de l'attitude est nécessaire. Ils ont besoin que la vitesse de rotation du véhicule soit contrôlée en amont afin de ne pas dépasser la vitesse de décrochage, vitesse au dessus de laquelle la lumière d'une étoile se trouve projetée sur de trop nombreux pixels durant la pose et ne permet plus la mesure.
Un capteur d'étoiles possède deux modes d'opération : le mode d'acquisition et le mode de suivi. Dans le premier, la position et la magnitude des objets brillants éclairant la matrice du détecteur sont comparées au catalogue d'étoiles afin de déterminer de façon grossière l'attitude du satellite sans information préalable. Une fois cette estimation de l'attitude intiale effectuée, le second mode permet le suivi sur la matrice des positions des étoiles identifiées. En sortie, un tel capteur est capable de fournir un quaternion d'attitude du repère capteur par rapport à un repère inertiel, tel que le repère J2000, et dans certains cas la vitesse de rotation du satellite.
Viseur d'étoile

Viseur d'étoiles ASTROP APS développé par l'agence spatiale nationale allemande DLT et la compagnie Jena-Optronik en Allemagne. Il est équipé d'une technologie de protection de radiation permettant de longues missions.
Crédit :
ESA, Jena-Optronik
Capteurs solaires
Les capteurs solaires permettent de déduire l'attitude du satellite de la mesure de l'angle d'incidence des rayons solaires sur le capteur. Ils sont classés en deux catégories : les capteurs analogiques et les capteurs digitaux. Dans les grosses missions satellitaires, ils permettent respectivement d'obtenir une précision de 1° à 0,1° et inférieure à 0,05°.
- Les capteurs solaires analogiques sont les plus utilisés pour les CubeSats car ils sont fiables, passifs et peu coûteux. Leur faible précision, généralement de l'ordre de quelques degrés pour cette filière, est avant tout limitée par l'albédo terrestre. Sur de plus gros satellites, ils sont essentiellement utilisés pour les modes d'acquisition/survie. Ils se composent d'une ou plusieurs photo-diodes qui convertissent l'énergie reçue, fonction de l'inclinaison solaire, en courant électrique. Ce courant est proportionnel au cosinus de l'angle entre la normale au capteur et les rayons solaires. Ainsi,
 si
si  et
et  si
si  , avec
, avec  le vecteur unité pointant vers la normale extérieure à la photocellule
le vecteur unité pointant vers la normale extérieure à la photocellule  et
et  le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée.
le vecteur unité allant du satellite au Soleil. Le champ de vue est un cône d'ouverture limitée. - Les capteurs solaires digitaux utilisent l'illumination de quelques pixels d'un capteur numérique CCD ou CMOS. L'ouverture est une fente étroite, et éventuellement la lumière solaire préalablement filtrée pour ne pas abîmer les capteurs trop sensibles. La position du ou des pixels éclairés permet de déterminer l'angle d'incidence du rayon de soleil. Le principe est généralisable à 2 axes. Ils sont généralement embarqués par des satellites n'ayant pas de capteur stellaire.
Capteur solaire digital
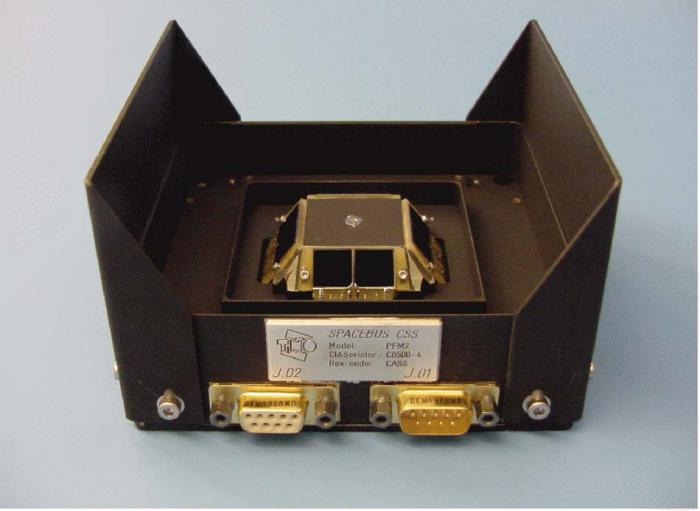
Capteur solaire analogique pyramidal développé par NTO pour la plateforme de satellites de télécommunication Spacebus-4000. Il fournit la position du Soleil selon 2 axes avec une précision meilleure que 0,1°.
Crédit :
ESA, NTO
Capteurs terrestres
Les capteurs terrestres sont utilisés pour déterminer l'orientation du satellite par rapport à la Terre. Plus précisément, c'est l'horizon de la Terre qui est utilisé, car la Terre elle-même peut couvrir jusqu'à 40% de l'espace environnant pour un satellite en orbite passe. Néanmoins, il est difficile de détecter précisément la limite de l'horizon à cause de l'atmosphère terrestre (jusqu'à 70 km), de la décroissance graduelle de l'énergie réémise par la Terre, des variations entre les régions illuminées ou à l'ombre, et enfin de la limite de précision des capteurs. Le principe de détection adopté est donc basé sur une variation thermique de l'élément sensible dans la bande spectrale infra-rouge où la Terre est vue comme un disque uniforme : la bande d'absorption du CO2 entre 14 et 16 μm. Ainsi, l'énergie émise par la Terre est plus homogène et l'horizon, précisément délimité, est visible de jour comme de nuit.
Ces capteurs peuvent être de deux types : les capteurs statiques, qui pointent dans une direction fixe, et les capteurs à balayage. Ils sont principalement utilisés sur des satellites en orbite basse et les satellites de télécommunication en orbite GEO ou MEO. Ils ont jusqu'à présent été assez peu utilisés sur CubeSats.
Magnétomètres
Les magnétomètres convertissent un champ magnétique ambiant en tension électrique. Ils sont principalement constitués de bobines conductrices qui génèrent un courant ou une variation de courant lorsqu'elles sont placées dans un champ magnétique. Ils ne possèdent pas de partie mobile, n'ont pas besoin d'un champ de vue dégagé, consomment peu et sont faiblement encombrants. Ils peuvent néanmoins être contaminés par le champ magnétique local créé par des matériaux ferromagnétiques ou des boucles de courant dans les panneaux solaires. Ainsi, il faut compenser ces champs locaux s'ils sont connus, ou s'en affranchir en se plaçant à bonne distance (au bout d'un mât par exemple) dans le cas contraire. La technologie la plus utilisée, "flux gate", délivre directement la projection du champ magnétique selon l'axe de la bobine, contrairement aux magnétomètres à induction qui fournissent la dérivée temporelle de la projection du champ magnétique. Ces capteurs étant monoaxiaux, on associe généralement trois magnétomètres orientés orthogonalement afin de mesurer le vecteur champ magnétique instantané.
Les magnétomètres sont limités à des environnements possédant un champ magnétique suffisamment fort, et donc à l'orbite terrestre basse du fait de la décroissance en  de son champ magnétique (
de son champ magnétique ( étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les magnétocoupleurs. Ils servent surtout à restituer l'attitude du satellite avec une précision de quelques degrés du fait des erreurs de modélisation du champ magnétique, des erreurs d'orbitographie et de celles propres au capteur. Dans ce cas, seule la connaissance de deux axes est disponible, l'orientation autour du champ magnétique n'étant pas observable. Enfin, on peut utiliser la dérivée du champ magnétique afin d'obtenir une mesure sur 2 axes de la vitesse angulaire du satellite.
étant l'altitude du satellite). On les utilise de différentes manières, l'une d'entre elles étant de calculer le champ magnétique instantané afin de mieux calibrer les couples à générer par les magnétocoupleurs. Ils servent surtout à restituer l'attitude du satellite avec une précision de quelques degrés du fait des erreurs de modélisation du champ magnétique, des erreurs d'orbitographie et de celles propres au capteur. Dans ce cas, seule la connaissance de deux axes est disponible, l'orientation autour du champ magnétique n'étant pas observable. Enfin, on peut utiliser la dérivée du champ magnétique afin d'obtenir une mesure sur 2 axes de la vitesse angulaire du satellite.
Magnétomètre monoaxial "fluxgate"
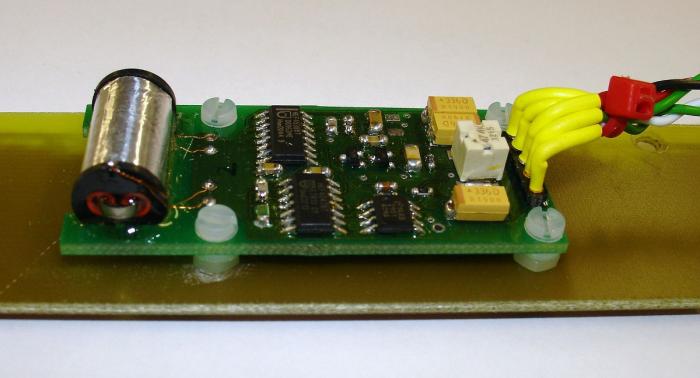
Un magnétomètre "fluxgate" génère son propre champ magnétique. En inversant régulièrement la direction du courant, on inverse le champ magnétique, ce qui permet d'obtenir un champ magnétique moyen nul. Dans le cas où la magnétomètre se trouve dans un champ magnétique ambiant, la moyenne n'est plus nulle et il est alors possible de connaître ce champ extérieur.
Crédit :
Wikipedia
Les capteurs inertiels fournissent au satellite une mesure par rapport à une référence fixe dans l'espace. Les gyromètres délivrent l'attitude (vitesse angulaire) et les accéléromètres la position par rapport à cette référence. Pour les premiers, il y a détection du mouvement de rotation absolue, tandis que pour le second c'est le mouvement de translation accéléré qui est détecté. Nous ne nous intéresserons pas ici aux accéléromètres qui ne sont pas utiles à la détermination d'attitude.
Gyromètres
Les gyromètres mesurent donc les vitesses angulaires du satellite. On peut en déduire l'attitude de celui-ci en intégrant les vitesses calculées sur un temps donné. Ils sont très intéressants car ils permettent de fournir en permanence les mesures de vitesse de rotation sans se soucier du champ de vue et avec une très bonne précision à court terme. Ils fournissent également des informations à plus haute fréquence que les autres capteurs, ce qui est nécessaire pour certaines boucles de contrôle comme pour le contrôle du vecteur de poussée lors de phases de propulsion. On distingue plusieurs types de gyromètres : les gyromètres mécaniques, les gyromètres optiques et les gyromètres vibrants.
Gyromètres mécaniques
Les gyromètres mécaniques utilisent une toupie gyroscopique. Celle-ci possède une raideur gyroscopique du fait d'une vitesse de rotation élevée permettant de la maintenir selon une direction fixe. Tout couple s'exerçant celui-ci provoque l'écartement de cet axe par rapport à la direction initiale avec une vitesse faible du fait de la rigidité gyroscopique. Le principe consiste à estimer les mouvements du véhicule par rapport à la direction de référence que matérialise l'axe de rotation de la toupie.
Gyroscope
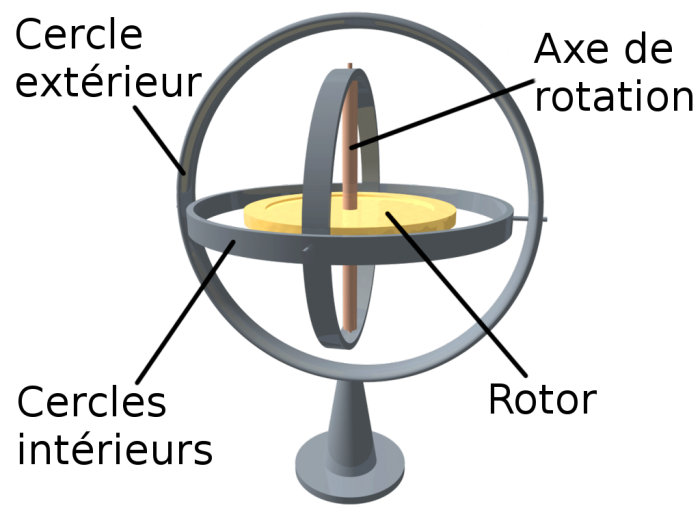
Exemple de gyroscope. Tant que le rotor (plateau central) sera en rotation, il gardera son axe de rotation fixe quelles que soient les orientations des cercles extérieurs.
Crédit :
Gary Quinsac
Gyromètres optiques
Les gyromètres optiques peuvent être des gyromètres laser ou à fibre optique. Dans les deux cas, ils présentent l'avantage de se dispenser de pièce mécanique en mouvement (pas d'usure), d'avoir de plus grande dynamique de mesure et bande passante, une insensibilité à l'accélération et moins de contraintes concernant la stabilité en température. Les gyromètres laser fonctionnent suivant le principe du laser à cavité résonnante. Les gyromètres à fibre optique reprennent l'effet Sagnac. Deux ondes parcourant un chemin fermé en rotation (par rapport à un référentiel inertiel) subissent un décalage temporel lorsqu'elles ont été émises et reçues par un émetteur/récepteur fixe par rapport au chemin optique. Le décalage temporel entre les deux rayons lumineux est ainsi proportionnel à la vitesse de rotation du système.
Gyromètre optique
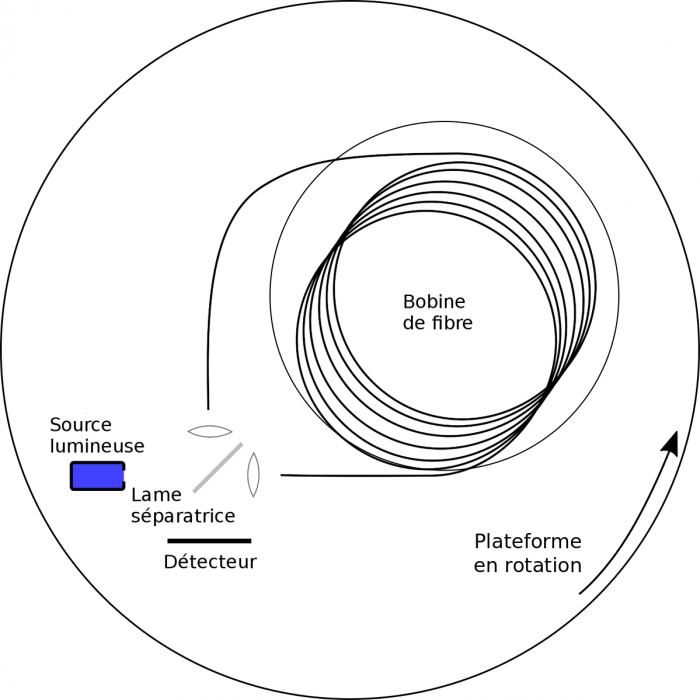
La lumière émise par la source se propage dans la bobine de fibre optique dans deux directions opposées suite à une première traversée de la lame séparatrice (un quart de l'énergie émise initialement arrivera sur le détecteur selon chacune des directions de parcours). Du fait de la rotation de la plateforme, les signaux lumineux parcourant la bobine de fibre dans des directions opposées arriveront au récepteur dans des temps différents. C'est l'effet Sagnac.
Crédit :
Gary Quinsac
Gyromètres vibrants
Les gyromètres vibrants quant à eux sont assez proches des gyromètres mécaniques, à la différence près qu'aucune pièce n'est ici en mouvement. Ils détectent le déplacement d'une onde vibratoire dans une structure, dû à la force de Coriolis.
Accéléromètres
Les accéléromètres sont principalement utilisés pour la navigation et le guidage des véhicules de rentrée atmosphérique ou dans l'identification de microvibrations. Une modification de leur tension de sortie est traduite en accélération. Le principe de base consiste à disposer d'une masse dans un boîtier fixée par des ressorts. Lorsque le boîtier est accéléré, la masse a tendance à rester fixe par inertie : elle est donc en mouvement par rapport au boîtier. Les ressorts ont alors pour effet de contrer le déplacement de la masse par rapport au boîtier, et ce déplacement devient alors proportionnel à l'accélération de ce dernier. Les accéléromètres sont capables de mesurer la résultante des forces de surface mais pas les accélérations d'origine gravitationnelle puisque la masse et son boîtier sont soumis au même champ gravitationnel.
Accéléromètre
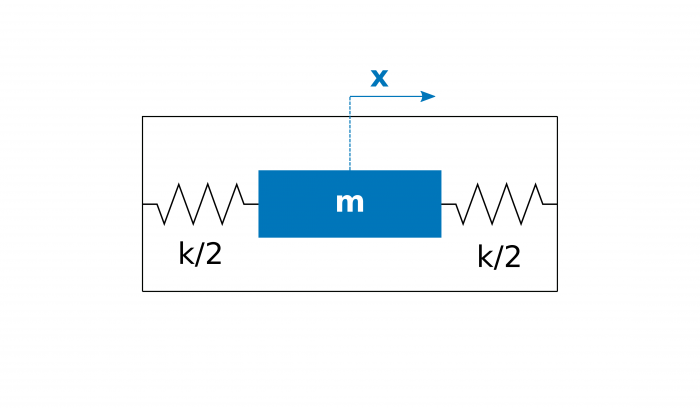
Le déplacement de la masse par rapport à la boîte dans lequelle elle se trouve dépend de l'accélération de la boîte.

, avec

l'accélération,

la masse,

la constante de raideur du ressort et

le déplacement du ressort.
Crédit :
Gary Quinsac