Spécificités de la propulsion
Parmi les fonctions couvertes par le SCAO il y a la réalisation des manœuvres de modification de la vitesse ainsi que le contrôle d'attitude associé (assurer le pointage des propulseurs lors de la poussée). Le ΔV nécessaire au contrôle d'orbite ne peut être fourni que par des propulseurs, néanmoins ceux-ci peuvent également être utilisés pour générer des couples. Contrairement aux magnéto-coupleurs, ce sont des actionneurs utilisables sur n'importe quelle orbite car ils n'ont pas besoin d'un environnement particulier pour fonctionner. Leur principal inconvénient est une durée de vie limitée inhérente à l'utilisation d'un carburant, lui-même en quantité finie.
Fonctions de la propulsion satellitaire
Il faut différencier la propulsion des lanceurs de celle des satellites. La première doit permettre des incréments de vitesse de l'ordre de 7 à 100 km/s et de très importants niveaux de poussée. Elle se caractérise par une faible capacité d'emport et se présente sous la forme de puissants propulseurs chimiques. La seconde, qui nous intéresse ici, sert à effectuer des transferts orbitaux et des voyages interplanétaires, du contrôle d'orbite et du contrôle d'attitude. Le sous-système propulsif d'un satellite remplit ainsi certaines fonctions :
- le transfert du véhicule de l'orbite d'injection lanceur à son orbite définitive,
- le maintien à poste (contrôle d'orbite),
- le contrôle d'attitude,
- la désorbitation du véhicule en fin de vie opérationnelle,
- le transfert interplanétaire et la mise en orbite autour d'un corps (planète, astéroïde, comète...) dans le cas d'une sonde interplanétaire.
Orientation du vecteur de poussée
Pour cela, il doit délivrer des forces et des couples. Les forces, ou poussées, sont obtenues par l'éjection de matière à grande vitesse et varient entre quelques μnewtons et quelques centaines de newtons. Suivant les axes de poussée, deux cas de figure sont possibles :
- si l'axe de poussée est parfaitement aligné avec le centre de masse alors on modifie uniquement la vitesse du véhicule,
- si l'axe de poussée n'est pas aligné avec le centre de masse, il y a à la fois une modification de la vitesse du véhicule (égale au cas où la force serait apliquée au centre de masse) et de sa vitesse de rotation (apparition d'un couple proportionnel à l'écart entre l'axe et le centre de masse).
Moteur principal de la navette américaine
Test d'allumage du moteur principal de la navette spatiale.
Crédit :
NASA
Système de propulsion de BepiColombo
Vue d'artiste du système de propulsion ionique qui sera utilisé pour la mission BepiColombo. Cette mission d'exploration de la planète Mercure doit être lancée en octobre 2018 et est développée conjointement par l'ESA et la JAXA.
Crédit :
ESA
Incrément de vitesse
Ecrivons que la variation de la quantité de mouvement du satellite est opposée à la variation de la quantité de mouvement du carburant expulsé : 
On peut directement en déduire la capacité d'incrément de vitesse total ( ) du satellite :
) du satellite : 
On en déduit l'équation de Tsiolkovski : 
 Manœuvres orbitales
Manœuvres orbitales
Voici quelques exemples d'incréments de vitesse associés à des lancements et à des manœuvres orbitales issus de "Spacecraft propulsion - A brief introduction" par Peter Erichsen :
Incréments de vitesses associés à des manœuvres spatiales et de décollage
| Manœuvre | ΔV typique [m/s] |
|---|
| Kourou → LEO (équatorial) | 9300 |
| Kourou → GTO | 11443 |
| Cap Canaveral → LEO (équatorial) | 9500 |
| Cap Canaveral → GEO | 13600 |
| LEO → GEO (changement d'inclinaison de 28°) | 4260 |
| GTO → GEO (changement d'inclinaison de 9°) | 1500 |
| GTO → GEO (changement d'inclinaison de 28°) | 1800 |
| Maintien à poste Nord/Sud | 50 / an |
| Maintien à poste Est/Ouest | 5 / an |
| LEO → Orbite de libération terrestre | 3200 |
| LEO → Orbite lunaire | 3900 |
| LEO → Orbite martienne | 5700 |
Quantité de carburant
Si l'on veut déterminer la quantité de carburant nécessaire à la réalisation d'un manœuvre spatiale  , il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir :
, il ne reste plus qu'à déplacer les termes de l'équation précédente afin d'obtenir : 
Impulsions
Nous pouvons maintenant définir de nouveaux termes. L'impulsion minimum (ou "impulse bit" en anglais, Ibit) est la plus petite modification de la quantité de mouvement permise par le système de propulsion. C'est un paramètre important lorsque l'on veut effectuer du contrôle fin de l'attitude et de l'orbite.
L'impulsion totale (Itot) quant à elle représente la capacité de modification de la quantité de mouvement pour une quantité donnée de carburant : ![I_{tot} = \int_{0}^{\tau}{F \ dt} = v_e \ \int_{0}^{m_p}{dm} = v_e \ m_p \ \textup{[N.s]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation10.png) .
.
Il est essentiel de définir des paramètres permettant de comparer la performance des différents systèmes propulsifs. Le plus utilisé, l'impulsion spécifique (Isp), peut être obtenue expérimentalement. Elle se définit comme l'impulsion délivrée par unité de poids de carburant :  , avec
, avec  le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
le champ standard de la pesanteur (9,81 m.s-2). Les impulsions spécifiques sont notées en secondes et parfois données en N.s.kg-1, ce qui correspond à la formule précédente multipliée par l'accélération standard de la pesanteur, donnant l'impulsion délivrée par unité de masse.
Dans le but de déterminer la performance du système propulsif dans son ensemble, en incluant la masse de l'ensemble (l'électronique, le carburant et réservoir, l'alimentation) mps, on introduit l'impulsion spécifique du système, notée Issp : ![I_{ssp} = \frac{I_{tot}}{m_{ps} \ g_0} \ \textup{[s]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation13.png) .
.
Action-réaction
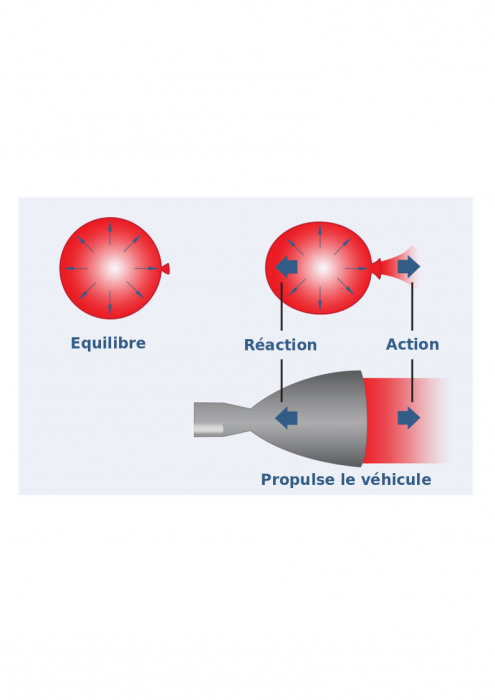
Illustration du principe d'action-réaction. Le carburant éjecté propulse le véhicule dans la direction opposée.
Le sous-système de propulsion est en interaction proche avec les sous-systèmes mécanique et thermique, notamment pour l'implantation des réservoirs et le contrôle thermique de la propulsion. Il doit également respecter les exigences du contrôle d'attitude et d'orbite (SCAO). Si son principe de fonctionnement est basique (une énergie emmagasinée est libérée afin de transmettre une énergie cinétique à un véhicule) il existe différents types de propulsion, eux-mêmes divisés en sous-groupes :
- la propulsion chimique dans laquelle un gaz à haute est libéré avec une importante quantité de mouvement,
- la propulsion électrique qui utilise une énergie électrique ou électromagnétique afin d'augmenter la quantité de mouvement du carburant expulsé,
- la propulsion "sans-carburant" qui, comme son nom l'indique, ne nécessite pas de carburant. Elle ne sera pas détaillée dans ce cours (ex : voile solaire).
Dans le but de répondre aux exigences du SCAO, les systèmes de propulsion sont en particulier caractérisés par :
- une faible poussée avec de faibles niveaux d'accélération,
- des modes d'opération continus pour le contrôle d'orbite,
- des modes d'opération pulsés pour le contrôle d'attitude,
- des performances prédictibles, précises et répétables,
- leur stockage (fiabilité...),
- l'impact des particules émises.
Certains de ces critères sont repris dans le tableau suivant pour les différents types de propulsion introduits dans ce cours.
Comparaison des différents types de propulsion
| Type de propulsion | Fiabilité | Coût | Isp | Poussée | Puissance électrique |
|---|
| Gaz froids | Gaz | Très bonne | Très bas | Très basse | Faible | Très faible |
| Liquide | Bonne | Très bas | Très basse | Faible | Très faible |
| Gaz chauds | Solide | Bonne | Bas | Moyenne | Très forte | Très faible |
| Mono-carburant | Bonne | Bas | Basse | Faible | Très faible |
| Bi-carburant | Moyenne | | Haute | Moyenne | Très faible |
| Électrique | Électrothermique | Moyenne | | Haute | Très faible | Forte |
| Électromagnétique | Faible | | Très haute | Extrêmement faible | Forte |
| Électrostatique | Faible | | Extrêmement haute | Très faible | Très forte |
Une comparaison de la force de poussée et de l'impulsion spécifique de systèmes de propulsion adaptés aux nano.micro-satellites est proposée dans cette figure.
Classification des sous-systèmes de propulsion
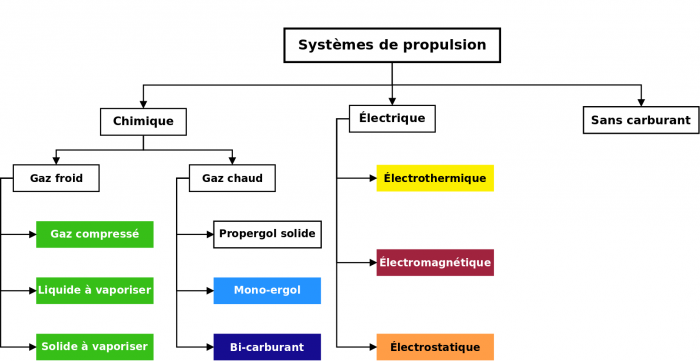
Les principaux systèmes de propulsion sont ici classés par catégorie. Les couleurs indiquées sur cette figure correspondent au couleurs présentes dans la figure suivante.
Crédit :
Gary Quinsac
Performances de systèmes de propulsion pour CubeSat
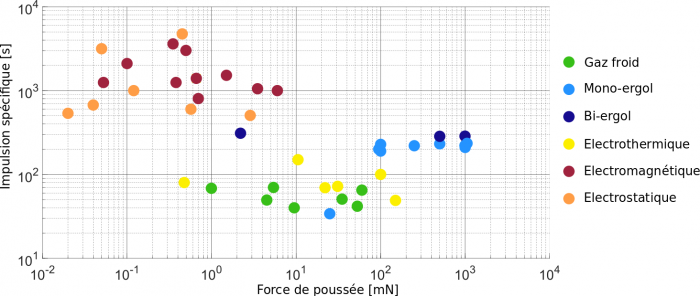
Impulsion spécifique et force de poussée de systèmes de propulsion pour CubeSat (en développement pour la plupart en 2018). Des couleurs permettent de différencier les différents types de propulsion.
Crédit :
Gary Quinsac
La propulsion chimique utilise des gaz à haute température et/ou pression, accélérés à travers une tuyère. Les systèmes de propulsion chimique sont généralement associés à des impulsions spécifiques plus faibles que les propulsions électriques, mais de plus grandes poussées. On peut les diviser en deux catégories : les systèmes à gaz froid et à gaz chaud.
Systèmes de propulsion à gaz froid
Ces systèmes utilisent des gaz stockés sous haute pression ou sous forme liquide. Les gaz sont détendus dans une tuyère convergente-divergente pour obtenir la force de poussée. Ce sont les systèmes les plus simples à mettre en œuvre, mais cela s'accompagne d'une faible force de poussée et d'un faible rendement (impulsion spécifique). Ils présentent une bonne aptitude au fonctionnement en mode pulsé, du fait du faible temps de réponse, les rendant attrayant pour assurer le contrôle d'attitude. Ils ont également l'avantage de limiter les contaminations de l'environnement, ce qui est intéressant notamment pour les optiques des missions scientifiques.
La simplicité de ces systèmes les rend intéressants pour les CubeSats. Néanmoins, du fait de la nécessité de pressuriser le carburant, ils ne respectent pas le cahier des charges décrit par le CDS ("CubeSat Design Specification").
Systèmes de propulsion à gaz chauds
Pour les missions requérant des niveaux de poussée et d'impulsion supérieurs, les gaz froids ne sont plus adaptés et il est nécessaire d'utiliser des carburants plus énergétiques générant des gaz chauds. Les systèmes à gaz chaud sont le type le plus commun de propulsion spatiale. Les ergols des systèmes à gaz chaud sont stockés à l'état liquide ou solide. Une réaction de combustion exothermique de l'ergol est nécessaire pour obtenir des produits à haute température qui sont ensuite expulsés dans la tuyère. Ils nécessitent donc généralement une étape de plus que les gaz froids. On les classe en deux catégories en fonction de leur ergol :
- liquide, comprenant mono-ergol et bi-liquide,
- solide, mais cela concerne les fusées et non les satellites car ils ne sont pas rallumables.
Mono-ergols
Le mono-ergol le plus utilisé est l'hydrazine. Il se décompose dans le propulseur par catalyse. Les gaz chauds résultant sont explulsés par la tuyère. Il présente l'avantage d'être fiable tout en conservant de bonnes performances, mais sa haute toxicité a poussé les chercheurs à s'orienter vers des aternatives appelée "mono-ergols verts". Ces ergols sont des sels dérivés de l'acide nitrique, tels que le dinitramide d'amonium.
Bi-liquides
Dans les systèmes à bi-liquides, deux ergols, un comburant et un carburant, produisent une force de poussée par combustion. Ils sont introduits séparément dans la chambre de combustion où ils s'inflamment spontanément par contact et génèrent des gaz chauds, une nouvelle fois détendus dans la tuyère. Ces systèmes sont plus complexes et plus chers que les systèmes présentés précédemment, mais ils sont également plus efficaces (meilleure Isp) et plus puissants (meilleure poussée).
Schéma des systèmes de propulsion chimiques
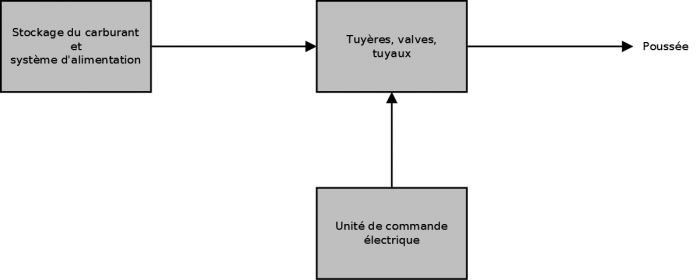
Crédit :
Gary Quinsac
La propulsion électrique contourne la limitation fondamentale de la propulsion chimique, c'est-à-dire que l'énergie du carburant expulsé ne dépend que de son énergie chimique et du débit. Une énergie électrique ou électromagnétique est utilisée afin d'éjecter de la matière à des vitesses beaucoup plus élevées. En d'autres termes, on utilise la puissance électrique issue du sous-système électrique (panneaux solaires, batteries...) pour accélérer le carburant et produire une force de poussée. Ces vitesses d'éjection plus importantes se traduisent immédiatement par une plus grande efficacité (moins de carburant est nécessaire pour obtenir un même incrément de vitesse). Néanmoins, les forces de poussée produites sont nettement plus faibles que dans le cas de la propulsion chimique. Par conséquent, la propulsion électrique est préférée lorsque le ΔV à réaliser est important ou lorsque il est nécessaire des manœuvres avec des poussées très faibles (contrôle d'attitude très précis, etc.).
La propulsion électrique offre une grande gamme de performances en fonction du type de sous-système utilisé. On les classe ainsi en trois catégories : les systèmes électrothermaux, électromagnétiques et électrostatiques.
Systèmes de propulsion électrothermaux
Historiquement, ces systèmes sont une amélioration par rapport aux systèmes de propulsion chimiques. Le gaz est chauffé en passant le long d'une surface chauffée électriquement ou à travers un arc électrique afin de lui conférer plus d'énergie. Le gaz ainsi chauffé bénéficie d'une détente plus efficace.
Systèmes de propulsion électromagnétiques
La propulsion électromagnétique utilise la conversion d'un gaz en plasma. Le plasma est constitué d'électrons (de charge électrique négative), d'ions (pour la plupart de charge électrique positive) et d'atomes ou molécules neutres (non chargés électriquement). Les ions positifs résultants sont alors accélérés à de très grandes vitesses par l'énergie électrique grâce à la force de Laplace  , où
, où  et
et  sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
sont respectivement le flux de courant ionique dans le plasma et le champ magnétique. Il en résulte une force de poussée sur le satellite dans la direction opposée.
Contrairement aux systèmes électrostatiques qui vont être présentés par la suite, les systèmes électromagnétiques expulsent un plasma globalement neutre, ce qui est intéressant pour éviter de charger électriquement le reste du satellite. Cette famille de propulseurs contient notamment les PPT (Pulsed Plasma Thrusters), les VAT (Vacuum Arc Thrusters) ou encore les MPDT (Magneto Plasma Dynamic Thrusters).
Systèmes de propulsion électrostatiques
À la manière de l'accélération électromagnétique, l'énergie électrique est dans un premier temps utilisée pour transformer le fluide propulsif en plasma. La différence se situe au niveau de l'accélération des ions qui n'est plus obtenue par les forces de Laplace mais par l'application d'un champ électrostatique  créant une force de Coulomb (
créant une force de Coulomb ( ). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
). Les systèmes de propulsion électrostatiques nécessitent généralement l'installation d'un neutraliseur (cathode) qui fournit des électrons au faisceau d'ions, afin de conserver la neutralité électrique du jet.
Parmi les propulseurs électrostatiques, on peut citer les propulseurs ioniques, les propulseurs à effet Hall et propulseurs FEEP (Field Emission Electric Propulsion).
Schéma des systèmes de propulsion électriques
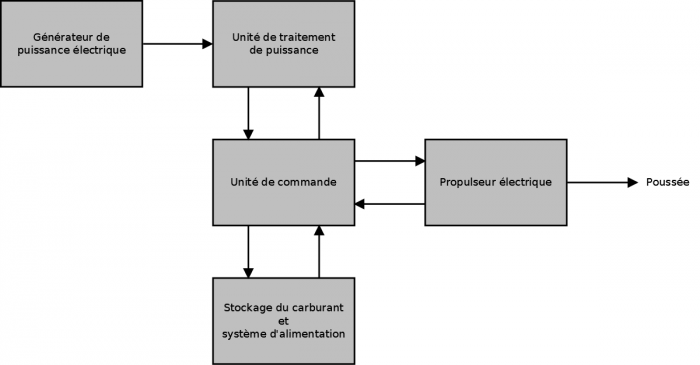
Crédit :
Gary Quinsac
 qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée
qui représente la vitesse relative entre le satellite et le carburant expulsé) avec une quantité de mouvement associée  , ce qui, par conservation de la quantité de mouvement, résulte en une
, ce qui, par conservation de la quantité de mouvement, résulte en une ![\bold F = \dot m \bold v_e \ \textup{[N]}](../pages_nanosats/equations_nanosates-comprendre-materiel-propulsion/equation3.png) .
.