Parmi les actionneurs inertiels, on distingue les roues d'inertie et les actionneurs gyroscopiques.
Roues à inertie
Les roues à inertie sont les actionneurs les plus utilisés pour le contrôle d'attitude des satellites. Elles permettent le stockage et la restitution du moment cinétique. Elles sont composées d'une masse en rotation autour d'un axe fixe ou volant d'inertie. Le couple créé par une roue à inertie est égal au changement du moment cinétique durant un temps donné (voir la page sur la dynamique d'attitude). Un couple est ainsi créé lorsque le moment cinétique de la roue à inertie est modifié, c'est-à-dire que sa vitesse de rotation change. Cette accélération ou décélération angulaire permet d'emmagasiner ou de libérer du moment cinétique. Ce type d'actionneur peut saturer, c'est-à-dire atteindre une limite supérieure ou inférieure en vitesse angulaire. Dans ce cas il lui devient impossible de fournir un couple selon cet axe (toute évolution possible est une décélération de la roue entraînant un couple dans le sens contraire à celui souhaité). Il faut alors utiliser un autre actionneur à bord pour ramener la vitesse dans une plage admissible tant pour le fonctionnement propre de la roue que pour les performances du contrôle d'attitude. Ces actions de réduction de la vitesse absolue du volant d'inertie, appelées "désaturation", se font lors de l'application d'un couple antagoniste, généralement à l'aide de magnéto-coupleurs ou de propulseurs.
Roues à inertie
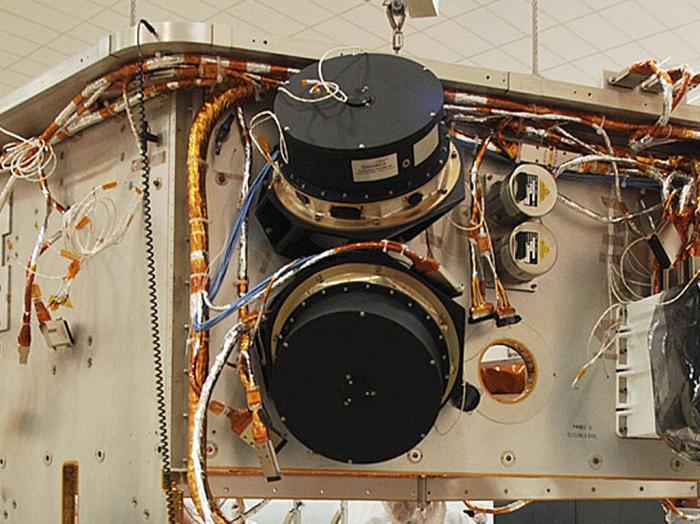
Deux des quatre roues à inertie du télescope Kepler durant l'assemblage. Elles sont inclinées différemment afin de permettre un contrôle de l'attitude selon plusieurs axes. L'une de ces roues a été victime d'un problème que l'on rencontre parfois avec ce type d'actuateurs, c'est à dire une friction trop importante. Pour parer à la perte d'une roue à inertie, on se permet généralement des configurations redondantes sur les gros satellites.
Crédit :
Ball Aerospace photo
Actionneurs gyroscopiques
Les roues à inertie sont limitées en termes de capacité de couple. C'est la raison pour laquelle les satellites nécessitant de rapides manœuvres ou possédant des fortes inerties (comme les stations orbitales) utilisent plutôt des actionneurs gyroscopiques, ou gyrocoupleurs. Contrairement aux roues à inertie, le principe n'est plus de produire un couple en faisant varier la vitesse de rotation de la roue, mais en modifiant l'axe de rotation d'une roue tournant à une vitesse constante. Une variation du moment cinétique est ainsi créée, se traduisant par un couple perpendiculaire au moment cinétique de la roue et au vecteur vitesse de rotation qui lui est appliqué (suivant le principe du couple gyroscopique). Les actionneurs gyroscopiques consomment moins d'énergie et possèdent une plus grande capacité de couple pour des masses et des tailles comparables. Néanmoins, leur utilisation est limitée par l'importance des couples appliqués aux articulations (risques de panne mécanique) et aux précisions requises dans les mesures de position et de vitesse angulaire.
Actionneur gyroscopique
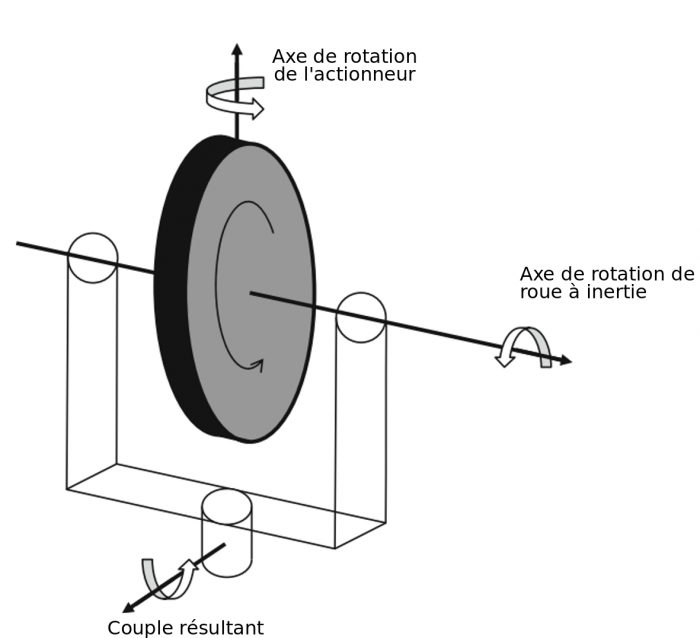
Fonctionnement d'un actionneur gyroscopique.
Crédit :
Gary Quinsac
Magnéto-coupleurs
Un magnéto-coupleur est une bobine qui, parcourue par un courant, génère un moment dipolaire  (en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre
(en A.m2). En présence d'un champ magnétique tel que le champ magnétique terrestre  , le magnéto-coupleur fournit alors un couple
, le magnéto-coupleur fournit alors un couple  . On distingue trois types de magnéto-coupleurs :
. On distingue trois types de magnéto-coupleurs :
- Le moment dipolaire des magnéto-coupleurs les plus simples s'exprime en fonction de nombre de spires
 , de l'aire de la section de la bobine
, de l'aire de la section de la bobine  et du courant d'intensité
et du courant d'intensité  la parcourant. Ce moment dipolaire s'exprime alors
la parcourant. Ce moment dipolaire s'exprime alors  et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale.
et est orienté perpendiculairement au plan de la bobine. Il est ainsi nécessaire d'effectuer de nombreux tours ou d'augmenter la section de la bobine si l'on veut obtenir un moment dipolaire plus important à intensité égale. - On utilise également des "torque rods", c'est-à-dire une bobine entourant cette fois un barreau ferromagnétique, afin d'obtenir de plus importants moments dipolaires pour un courant donné.
- Enfin, on réalise également des magnéto-coupleurs "embarqués", c'est-à-dire qu'ils sont directement obtenus sur le PCB où la bobine vient prendre la place des traves de cuivre de la plaque. La bobine prend alors la forme d'une spirale carrée.
La principale limitation de cet actionneur est que le couple généré est toujours orthogonal au champ magnétique, limitant à seulement deux angles d'attitude le contrôle du satellite en un point donné de son orbite. À l'instar des magnétomètres, leur utilisation est limitée aux orbites terrestres basses. Ils peuvent être utilisés soit pour effectuer du contrôle d'attitude soit pour "désaturer" des actionneurs inertiels. La plupart des applications des magnéto-coupleurs utilisent trois appareils produisant des couples sur trois axes orthogonaux. Il n'est pas toujours nécessaire d'employer plus de magnéto-coupleurs pour la redondance puisqu'ils ont habituellement un "double enroulement" fournissant une redondance interne.
Magnéto-coupleurs
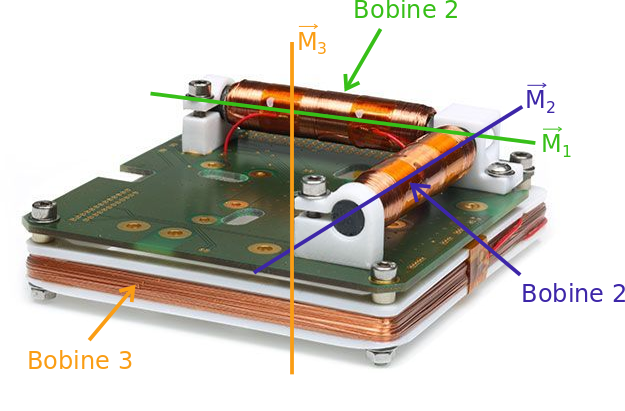
"SatBus MTQ" est un système composé de trois magnéto-coupleurs orthogonaux respectant le standard CubeSat. Les bobines 1 et 2 bénéficient d'un barreau ferromagnétique, contrairement à la bobine 3.
Crédit :
Nano Avionics