| Introduction | Structures planétaires | Observables | Techniques et méthodes | Lieux de vie | Auteurs | Boite à outils |
Système de Guidage, Navigation et Contrôle |


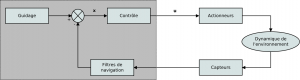
Lorsque l'on s'intéresse à l'orbite du satellite, on parle alors de guidage, navigation et contrôle (GNC). C'est une branche de l'ingénierie consacrée à la conception des systèmes de contrôle des véhicules (automobiles, bateaux, avions et satellites). La navigation répond à la question "où sommes-nous ?", le guidage à la question "comment aller à notre destination ?" et le contrôle "quelle commande donner au véhicule ?". En somme, cela concerne la détermination d'orbite et la majeure partie du contrôle, à l'exception de la réalisation du contrôle qui est prise en charge par le sous-système de propulsion. Ce sous-système joue un rôle essentiel dans le succès des missions qui impliquent un rendez-vous, de l'arrimage ("docking") et des opérations de proximité. Le logiciel de GNC se compose d'un filtre de navigation, d'un algorithme de guidage et d'un algorithme de contrôle. Ce sous-système doit ainsi :
Il ne faut pas confondre le système GNC embarqué avec le système de dynamique de vol qui fait partie du segment sol. Le GNC doit faire face à des contraintes temporelles et de calcul beaucoup plus fortes, ce qui conduit généralement à des performances des logiciels en vol insuffisantes. Un suivi depuis le sol peut se faire a posteriori et ainsi fournir une mise à jour de paramètres tels que la trajectoire de référence. Les exigences du système GNC dépendent fortement du niveau d'autonomie attendu. L'autonomie à bord permet au segment spatial de continuer les opérations de mission et de survivre à des situations critiques sans avoir recours au segment sol. Plus l'autonomie est importante plus les coûts de développement sont importants, mais les coûts d'opération diminuent. De même, dans le cas de missions interplanétaires, la rareté des canaux de communication peut être une motivation pour limiter les interactions avec le segment sol. Rares ont été les satellites autonomes sur ce plan, même si nous pouvons citer SMART-1 de l'ESA et Deep Space 1 de la NASA. Dans la plupart des cas, une majeure partie des étapes nécessaires au contrôle d'orbite sont effectuées par le segment sol avant que des télécommandes soient transmises au satellite.
À la manière de l'estimation d'attitude, l'objectif est d'obtenir une estimation de la position orbitale satisfaisant les exigences de la mission. La navigation est généralement implémentée sous la forme d'un filtre numérique joué par l'ordinateur de bord.
Le guidage se sert de l'estimation fournie par la navigation et de la consigne mission pour calculer certains des points suivants :
La trajectoire de référence est calculée par le segment sol et peut être mise à jour durant la mission. Les écarts à cette référence doivent rester suffisamment faibles afin que le guidage puisse les compenser au moyen de faibles variations du profil de poussée. Ces écarts peuvent être dus à des perturbations extérieures, des erreurs d'exécution de manœuvre, des incertitudes de navigation ou des délais opérationnels.
En s'appuyant sur l'estimation de l'état du véhicule (position, vitesse) fournie par le filtre de navigation et sur la trajectoire de référence calculée par la fonction de guidage, la fonction de contrôle s'assure de la bonne exécution de la manœuvre et corrige les erreurs résiduelles. La fonction de contrôle traduit donc les manœuvres reçues en entrée dans le format exigé par la fonction qui s'occupe de la gestion des actionneurs.
Dans le cas de propulseurs, le contrôle établit des forces dans le référentiel du satellite qui seront obtenues en contrôlant le niveau de poussée durant une durée déterminée ou en contrôlant la durée d'une poussée de puissance constante. Une fonction de gestion de la propulsion se chargera de sélectionner le propulseur optimal pour fournir la force ainsi que de fournir les couples réclamés par la fonction de contrôle de l'attitude du satellite.
